










-
随着空间高分辨率相机在地球资源观测、灾害监测等领域的应用需求发展,光学遥感相机的分辨率已达到亚米级,国外如美国DigitalGlobe公司商用遥感卫星WorldView系列,星下点全色像元分辨率达到0.3 m,国内如“高景一号”、“吉林一号”等商业遥感载荷,星下点全色像元分辨率已分别优于0.5 m、0.72 m[1-2]。空间光学遥感相机正朝着高分辨率、轻型化和商业化的方向发展,作为关键元件,大口径高精度反射镜的研制是一项关键技术[3-4]。
针对商业化的应用需求,大口径反射镜轻量化程度越高越好,而如何保证反射镜面形的天地一致性,是大口径反射镜研制过程中的难点之一[5]。中小口径反射镜加工检测时常采用的V形支撑、侧面支撑、中心支撑、背面支撑或吊带支撑等传统的被动支撑方式,应用于大口径反射镜时,其重力变形对面形的影响较大,难以满足检测要求,通常不被1 m以上口径的高精度反射镜所采用。当前大口径反射镜的地面检测主要采取两种技术路线:一种是光轴水平检测,利用反射镜径向刚度数倍于轴向刚度的特点,直接采用飞行支撑,通过对支撑的布置设计或参数优化使重力对面形的影响可以接受,如王克军等[6]设计的2 m口径的SiC反射镜,面密度103.8 kg/m2,采用背部18点加周向12点结合的支撑方式,仿真得到重力引起的面形RMS为4.3 nm (约0.0068λ),郭疆等[7]研制了采用背部三点膜片式柔性支撑结构的1.5 m口径主镜组件,反射镜面密度89.8 kg/m2,仿真得到重力引起的面形RMS为4.5 nm (约0.0071λ);另一种路线是光轴竖直检测,反射镜背部采用专用支撑工装提供离散的重力卸载,以尽可能消除重力对面形检测结果的影响,镜面加工完成后再将反射镜转移到飞行支撑上,该方法被广泛采用[8-12],典型实例如美国著名的哈勃望远镜主镜,口径2.4 m,面密度180 kg/m2,设计采用背部134点的重力卸载主动支撑,通过精确控制各点卸载力[8],最终实现重力变形下RMS值优于6.4 nm(约0.0101λ)。对比两种路线,前者属被动支撑方式,易于工程实施,然而当反射镜口径更大、轻量化程度更高或面形精度指标更高时,其应用存在局限性;后者通过重力卸载能够实现更高的地面检测精度,但是其重力方向刚度弱,面形对卸载力的变化很敏感,不易控制,且切换飞行支撑后无法继续卸载。
文中提出了一种应用于高轻量化大口径反射镜光轴水平状态检测的高精度重力卸载优化方法,对三点静定约束下的镜体实施多点主动卸载,详细分析了卸载力作用位置对面形的影响规律,总结出卸载参数的快速优化要点。将优化结果成功应用于某Φ1550 mm口径高轻量化反射镜的地面面形检测,数据显示,卸载后重力对面形的影响小于0.001λ。该方法具有高效、适应性广的优点。
-
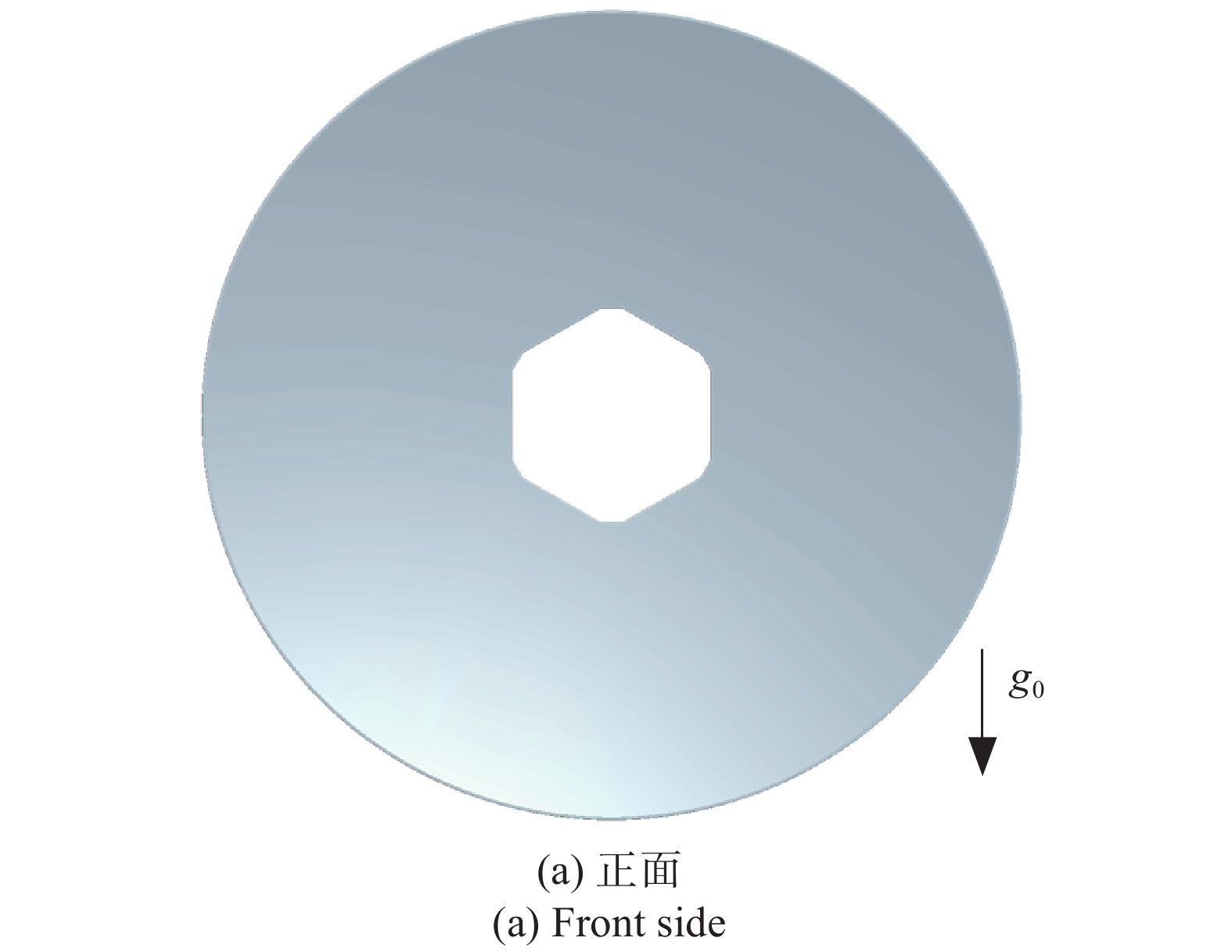
某可见光相机主反射镜为凹非球面刚性单体镜,如图1(a)所示,口径Φ1550 mm,镜坯选用高比刚度、热稳定性好的SiC材料。反射镜绕光轴对称六等分,每六分之一内部呈镜像对称,背部采用全开放的三角形减轻槽设计,加强筋交汇处布有圆孔,可用于零件支撑或卸载,如图1(b)所示,反射镜设计质量122.7 kg,面密度仅69 kg/m2。


图 1 Φ1550 mm SiC反射镜模型
Figure 1. Model of Φ1550 mm SiC mirror
设反射镜等效厚度为tA,由公式(1)表示:
$$ {t}_{A}=\frac{{\rho }_{s}{S}_{A}}{\rho {S}_{A}} $$ (1) 式中:ρs为反射镜面密度;ρ为材料密度;SA为口径面积。因此,当反射镜口径及材料确定时,面密度越小,代表等效厚度越小,此时反射镜轴向刚度较低,光轴竖直状态自重作用下变形也就越大,面形对卸载力的变化也更为敏感。所研究反射镜轻量化程度高,面密度较小,为尽量避免光轴方向刚度差对面形的不利影响,采用光轴水平状态进行重力卸载,重力加速度g0方向如图1所示。
-
一般情况下,卸载力分布密度越大,重力对反射镜面形的影响越小,但工程实施难度也就越大。因此,在既保证面形卸载精度又尽量简化实施的前提下,根据一定的原则(文中不予详述)将镜体在面内划分为18种规格共计192个分区,各规格以1~18依次编号,在每个分区内选定一个轻量化结构孔作为卸载力的作用位置,如图1(b)所示,卸载力大小等于分区重力,形成对反射镜的分布式多点主动支撑,不同规格分区的数量及卸载力大小见表1。
表 1 不同规格分区的数量及卸载力大小
Table 1. Quantity and unload force of different mass blocks
Block number i 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Unload force Fi/N 8.69 10.76 9.40 9.17 8.48 6.19 5.54 5.39 4.22 4.01 3.89 3.70 4.27 5.38 10.44 4.44 3.98 3.36 Quantity Ni 12 6 -
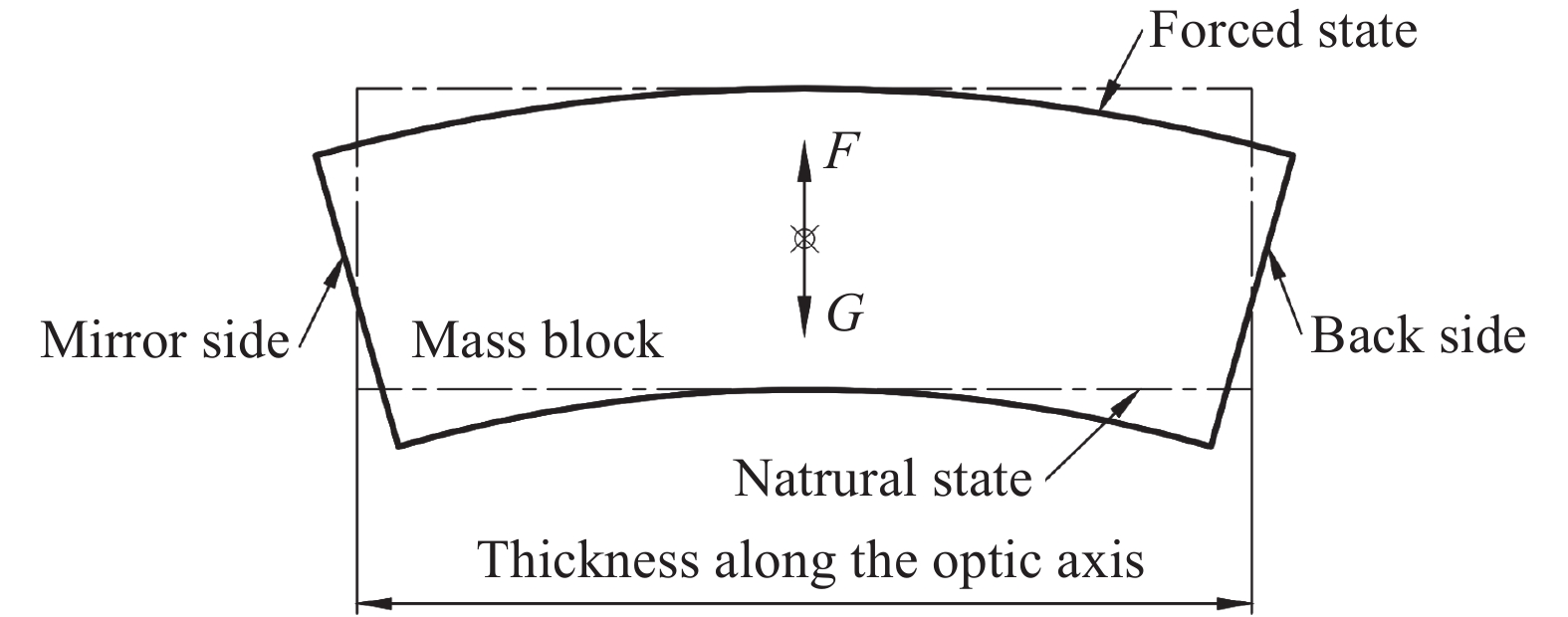
各质量分区的卸载力作用于反射镜卸载孔内壁,在满足面形精度要求的前提下,支点数量应尽量少,以降低工程实施难度。将单个质量分区抽象为独立的柱体,柱体长度与分区的厚度正相关,将支撑点放置在重心位置,受力状态如图2所示,卸载力F与重力G大小相等,显然,离支撑点越远的截面,挠度及转角越大。分区厚度增加时,镜面变形加剧,当厚度超过一定界限时,单点支撑无法获得好的面形,此时应增加支撑点,减小镜面变形。

图 2 单点支撑状态受力与变形
Figure 2. Forced state and deformation in single-point supporting
各质量分区背部的筋高度不一,根据公式(2)计算各分区的等效镜体厚度Hi:
$$ {H}_{{i}}={V}_{r{i}}/{S}_{r{i}}+h $$ (2) 式中:Vri为编号为i的质量分区立筋部分的体积;Sri为该分区筋截面沿光轴方向的投影面积;h为镜面面板厚度。根据公式(2)得到各分区等效镜体厚度Hi值,最大值H2为163 mm,最小值H14为39 mm,文中取最大值的1/2 (81.5 mm)作为划分单、双点支撑方式的厚度界限,得到表2中所示的8种双点支撑分区及10种单点支撑分区,总计产生282个卸载力支点。
表 2 不同质量分区的等效镜体厚度
Table 2. Equivalent thickness of different mass blocks
Double-point supporting blocks Block number i 1 2 3 4 5 6 7 15 Equivalent thickness Hi/mm 128 163 146 148 136 99 87 160 Single-point supporting blocks Block number i 8 9 10 11 12 13 14 16 17 18 Equivalent thickness Hi/mm 44 69 64 63 59 42 39 73 63 50 -
卸载力在光轴方向的位置直接决定了重力矩的大小进而影响镜面变形,因此将其作为重力卸载待优化参数。以卸载合力与重力轴向位置相同为原则进行初值设定,针对单点支撑分区,卸载力Fi轴向位置过重心;针对双点支撑分区,如图3所示,沿重心所在平面将分区划分为前、后两部分子区,再根据各子区的重心位置确定支撑分力Fi1、Fi2的大小及位置,且Fi1、Fi2的相对位置不再改变。

图 3 编号为i的双点支撑分区支点位置
Figure 3. Positions of the forces for double-point supporting block i
-
根据光学系统设计指标,反射镜在轨工作状态面形RMS应优于1/50λ,其中分配给重力影响的误差仅为其中的十分之一。以反射镜光轴水平状态重力及卸载力共同作用下面形误差RMS小于0.002λ为优化目标,采用有限元仿真分析的方法对卸载点在光轴方向的分布位置进行优化。
-
在HyperMesh中建立反射镜有限元模型,用四面体二阶实体单元划分网格,材料为SiC,弹性模量350 GPa,泊松比0.14,密度3.12 g/cm3。以反射镜光轴从背面指向镜面为+X轴,重力方向为-Z轴,根据右手定则建立分析坐标系。反射镜光轴水平状态放置,在各初始位置加载集中力进行重力卸载,全部卸载力的合力大小与反射镜重力相等。将反射镜Φ1100 mm分布圆上等间隔的三点,参照图4所示圆心-rtz柱坐标系约束切向T及轴向Z两方向自由度,实现三点静定支撑。

图 4 反射镜卸载状态位移约束
Figure 4. Mirror’s displacement constraint when unloaded
设镜体质量分区i的卸载合力Fi从初始位置沿+X轴移动Ti (i取前述分区编号1,2,···,18),作为文中规划的18个相互独立的面形优化参数。
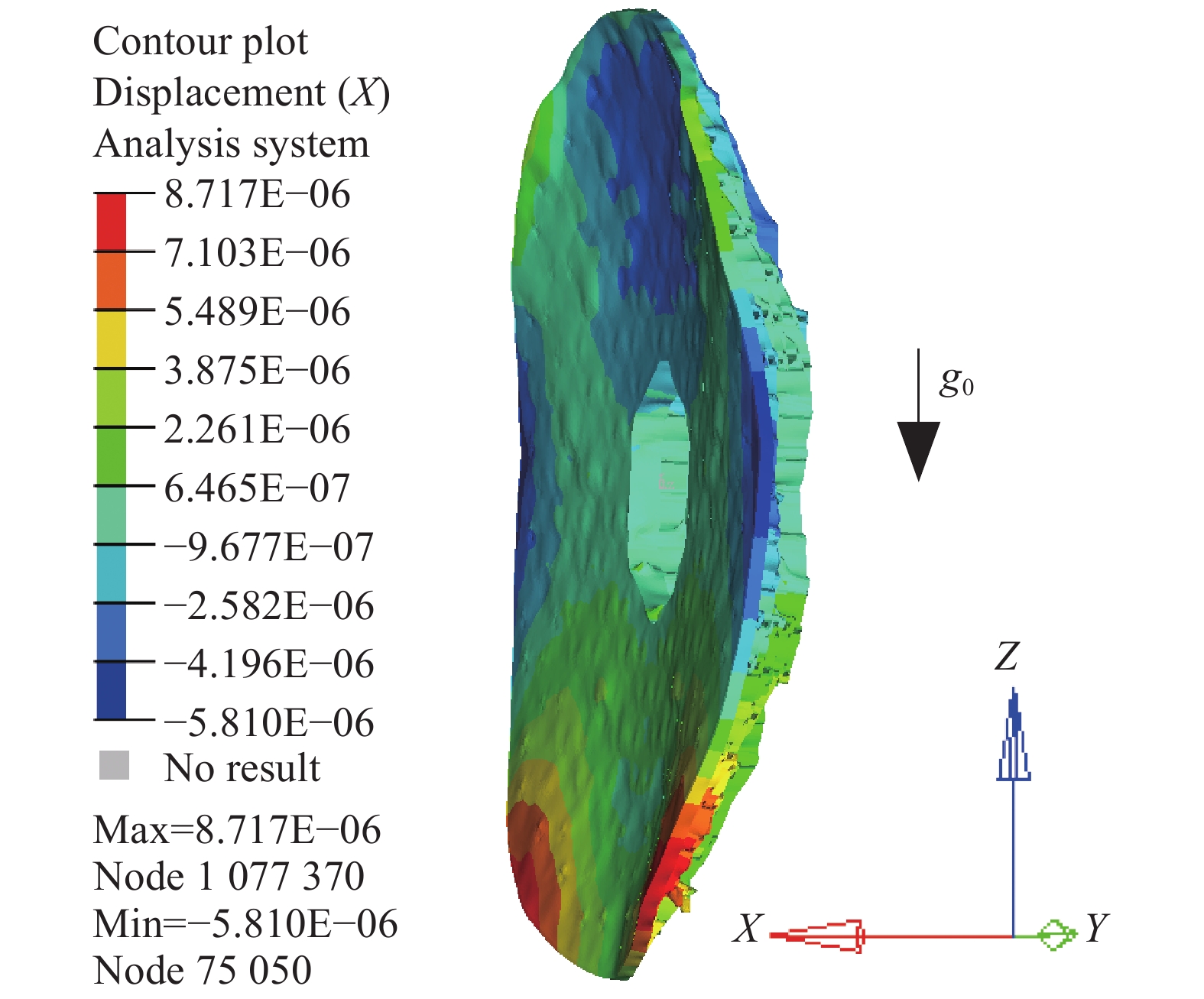
以各分区的重心位置为原点,根据1.4节,所有卸载点位移初始值为Ti=0,计算得到反射镜X向位移云图如图5所示,剔除倾斜、偏移及整体变形后(文中所列出反射镜整体面形均以该方式计算)得到反射镜面形PV值为0.0724λ,RMS值为0.0137λ,远不满足RMS优于0.002λ的要求。

图 5
$ {T}_{{i}}=0 $ 时反射镜X向位移云图Figure 5. Contour plot of the mirror’s X displacement (
$ {T}_{{i}}=0 $ ) -
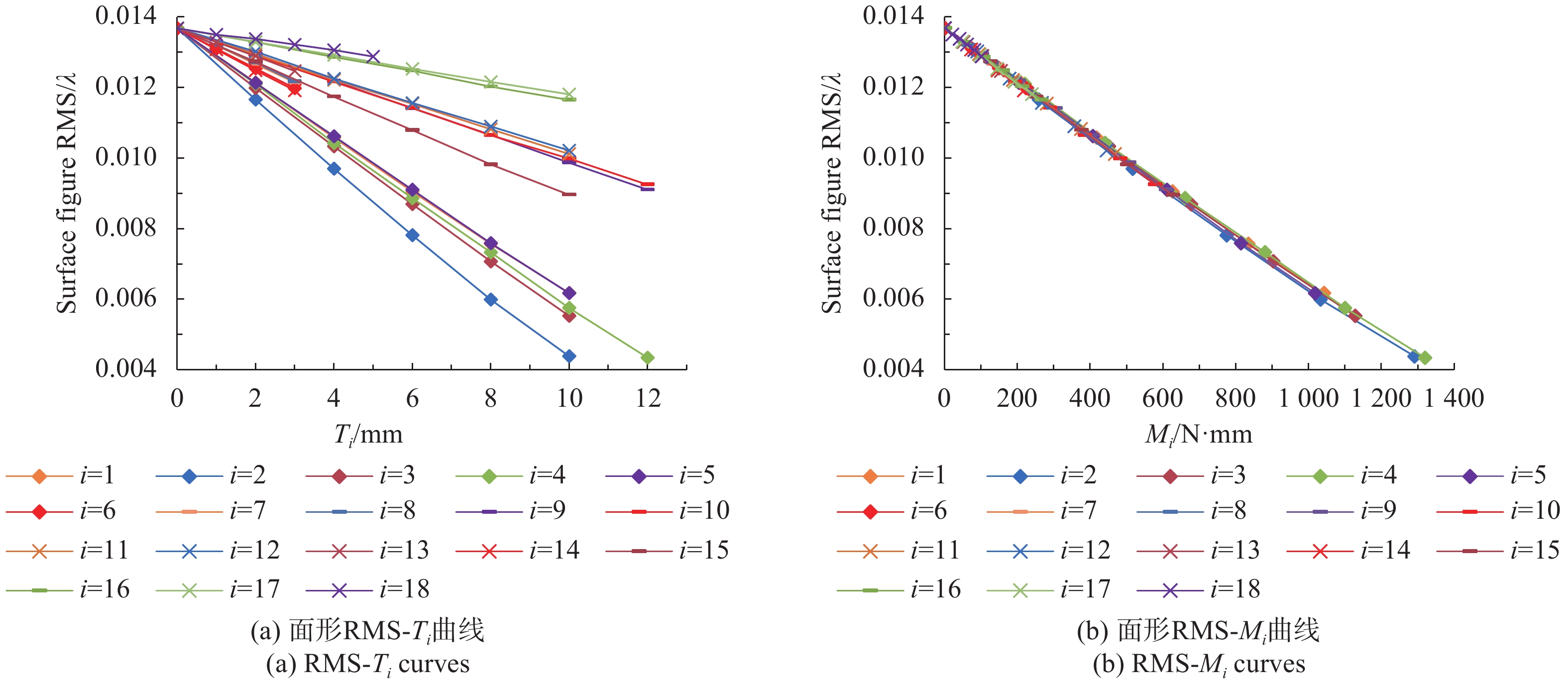
由于初始状态反射镜变形整体呈“低头”状态,根据经验判断,应使Ti增大以形成反向力矩,因此在结构极限范围内,计算不同分区的Ti单独变化对面形RMS的影响,结果如图6(a)所示。从图中可以看出,面形误差对各分区Ti的敏感程度不同,其中,T2对应的面形RMS下降最快,T18对应的面形RMS下降最慢,与此相应,18种镜体分区中卸载力最大的是F2=10.76 N,最小的是F18=3.36 N。

图 6 面形RMS的参数影响曲线
Figure 6. Influence of parameters on the surface figure RMS
分析这一现象发现,T1~T18虽相互独立,但其变化归根结底是通过改变重力与卸载力的合力矩而影响镜面变形,因此T1~T18对面形RMS的影响应具有一定的相关性规律,找出该规律有助于降低优化参数维度,简化优化过程。
现引入中间参数Mi,设Mi为所有编号为i的质量分区所受的合力矩,则有
$ {{M}_{{i}}=F}_{{i}}\times {T}_{{i}}\times {N}_{{i}} $ ,其中Fi为分区i的卸载合力,Ni为分区i的数量。计算得到如图6(b)所示的面形RMS-Mi曲线,图中各曲线基本重合,说明不同编号Mi对反射镜面形的影响基本一致。在此基础上,生成多组T1~T18不同取值的参数组合进行面形分析计算,得到与RMS-Mi基本重合的变化曲线。由此说明,反射镜面形RMS受总力矩和$\displaystyle\sum {M}_{{i}} $ 的单一影响。由于当
$\displaystyle \sum {M}_{{i}} $ 相同时,面形不因T1~T18取值不同而变化,因此可简化为令所有Ti = T进行迭代计算,得到如图7所示的面形RMS-T曲线,当T=1.43 mm时,面形RMS值最小(0.0024λ),将此初步优化所获得的最优状态记为为S1。
图 7 面形RMS-T曲线
Figure 7. RMS-T curves
-
根据S1状态结果,反射镜面形RMS达到0.0024λ,相比初始状态下0.0137λ降低了约83%,但仍不满足优于0.002λ的要求,因此还需要进一步优化。反射镜S1状态X向位移云图如图8所示,可以看出反射镜下方两侧局部有凸出的红色区域,将镜面分上下两半分别计算相对镜面整体拟合面的RMS误差,上半部为0.0022λ,下半部为0.0026λ,说明上、下半镜的面形对相同的卸载力位置反应不同。

图 8 T=1.43 mm时反射镜X向位移云图
Figure 8. Contour plot of the mirror’s X displacement (T=1.43 mm)
将位于反射镜上、下半部的卸载点位移按不同取值进行计算,设所有位于上半侧的卸载力位移Ti均取相同值TU,所有位于下半侧的均取相同值TD,S1状态时,TU = TD = 1.43 mm。由于S1状态的面形已接近目标值,故二次优化在其附近进行参数搜索取值。
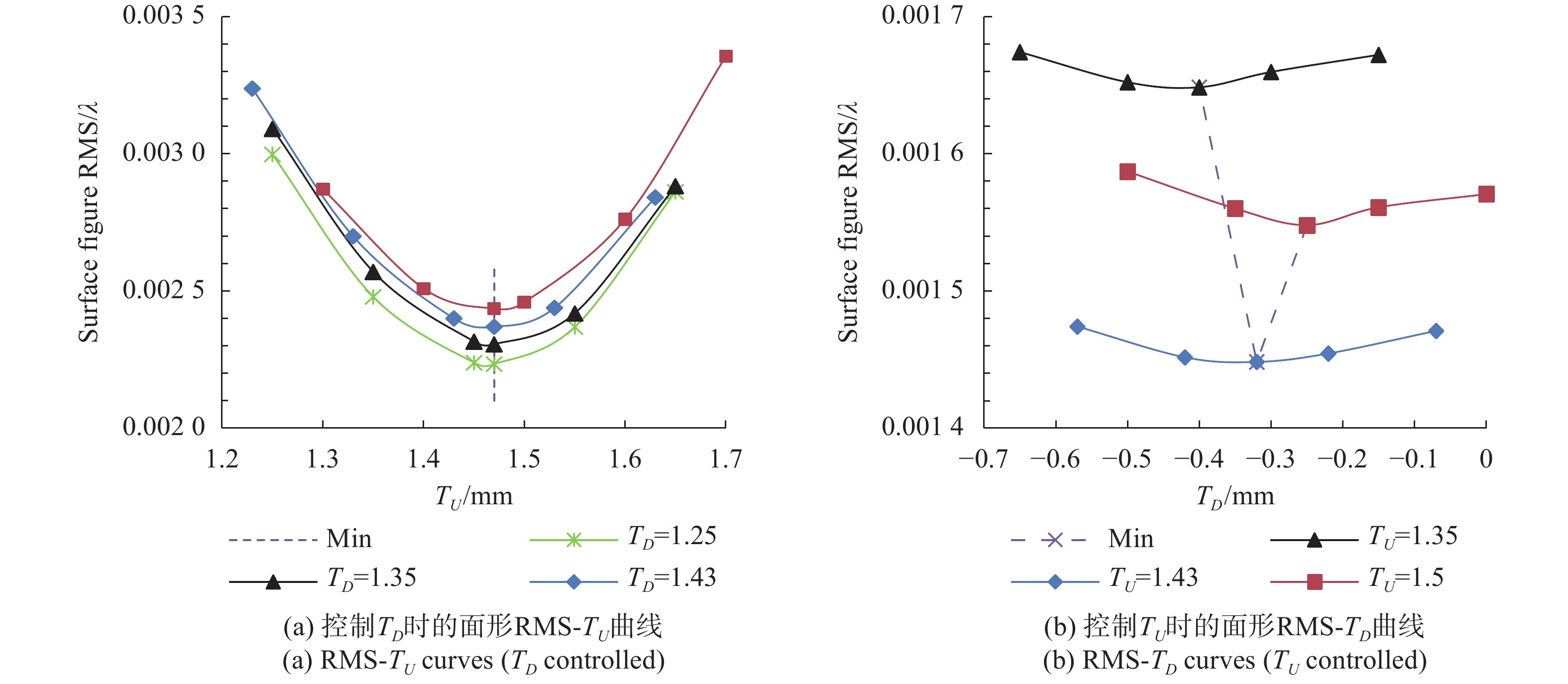
通过仿真可知,保持TD = 1.43 mm不变,TU = 1.47 mm时面形最优,改变TD的值,得到一组RMS-TU曲线,如图9(a)所示,随着TD的减小,面形RMS最优值也递减,而对应的TU值基本不变。据此趋势预测:随着TD继续减小,面形RMS最优值也会进一步减小直至满足要求,且此时对应的TU值在1.47 mm附近。

图 9 面形RMS的TU、TD影响曲线
Figure 9. Influence curves of TU and TD on the surface RMS
同样,先保持TU = 1.43 mm不变,改变TD求得面形最优值,再改变TU值得到一组RMS-TD曲线,如图9(b)所示,TU = 1.43 mm时,面形RMS最优值出现谷值0.00145λ,与预测相符,此时TD = −0.32 mm。记此二次优化结果为S2状态,相比S1状态面形RMS值降低了39.6%,且满足目标0.002λ的要求,为文中优化的最终结果。
-
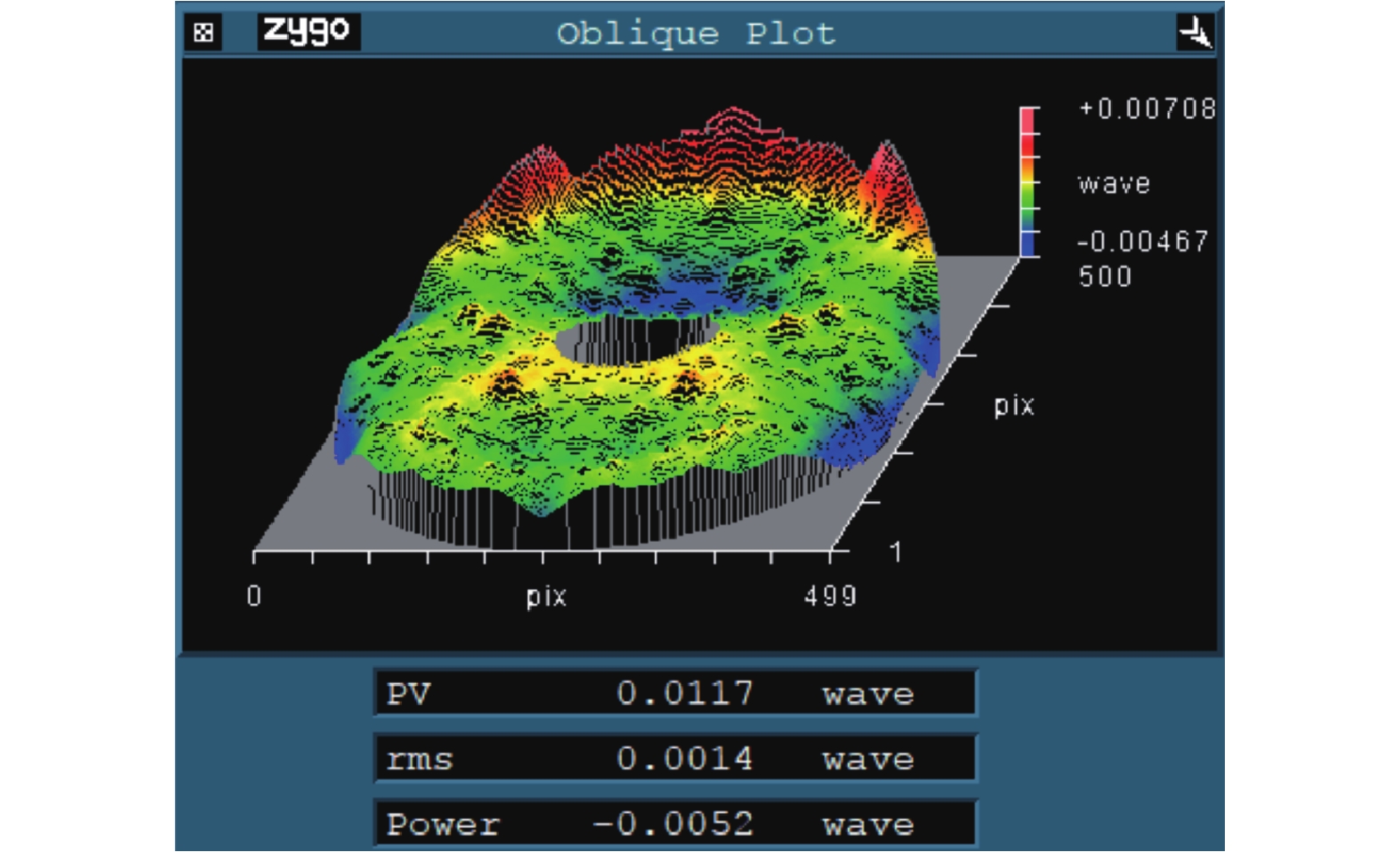
S2状态下,所有位于反射镜上半部的卸载力沿+X向平移1.43 mm,所有位于反射镜下半部的卸载力沿-X向平移0.32 mm。此时剔除平移、倾斜及整体缩放后的面形误差云图如图10所示,PV值为0.0117λ,RMS值为0.0014λ,其中上半部相对整体拟合面误差RMS值为0.0017λ,下半部为0.001λ。

图 10 S2状态反射镜面形误差云图
Figure 10. Contour plot of the mirror’s surface error of S2 state
-
根据第1、2节,总结出大口径反射镜光轴水平状态下,以重力对面形RMS的影响最小为目标进行重力卸载参数优化的要点:(1)反射镜各质量分区内,以与重力相等为原则确定卸载力的大小,以等效厚度值确定支点数量,以卸载合力轴向位置过重心为原则,确定支撑点位置初始值;(2)以卸载力的轴向位移为参数进行仿真优化;(3)卸载力位置变化本质上通过改变反射镜合力矩而影响面形,初步优化时可将参数降至一维,即所有位移取相同值进行迭代;(4)若仍未满足指标要求,可增加优化参数进行二次优化:将位于反射镜上、下半部的卸载力位移分取不同值,上部位移对面形影响较大,初步优化已基本达到最优取值,可仅改变下部位移进行迭代计算。
对相同口径结构相似的多个反射镜采用同样的方式进行重力卸载优化,均证明了该方法可准确、快速地确定大口径反射镜的面形检测卸载方案,且能极大地加速优化过程,适用于其他类似大口径反射镜的重力卸载。
-
对某Φ1550 mm口径高轻量化SiC反射镜进行重力卸载优化设计,根据反射镜的实际尺寸和质量进行模型及卸载参数修正,再将重力卸载单元按设计的支撑位置和卸载力大小进行安装调试,应用于反射镜光轴水平背部三点静定支撑的面形检测中。
由于反射镜静定支撑结构采用弱约束设计,强度不足以支撑镜体自重,因此无法对反射镜不卸载状态进行面形检测来作出直接对比。假定反射镜原始面形为随机生成的RMS误差约为1/60λ的面形,通过有限元方法分别计算其绕光轴旋转0°、120°及240°时受重力及卸载力作用下的面形,得到如表3所示结果(表中面形均处理为同一结构方位)。可以看出,反射镜受重力作用不卸载时,面形主要呈现重力影响分量,三方位RMS误差大幅偏离原始面形,波动量0.0056λ,且误差云图出现明显方位差异,而将反射镜按文中参数进行重力卸载后,三方位面形分布及RMS误差均接近原始面形,且其间仅波动0.0002λ。因此,通过对比反射镜三个旋转对称方位的面形分布及RMS误差对卸载效果进行间接验证。
表 3 三方位重力及卸载力作用下反射镜面形图
Table 3. Surface figure of the mirror with gravity unloaded or not in 3 directions

-
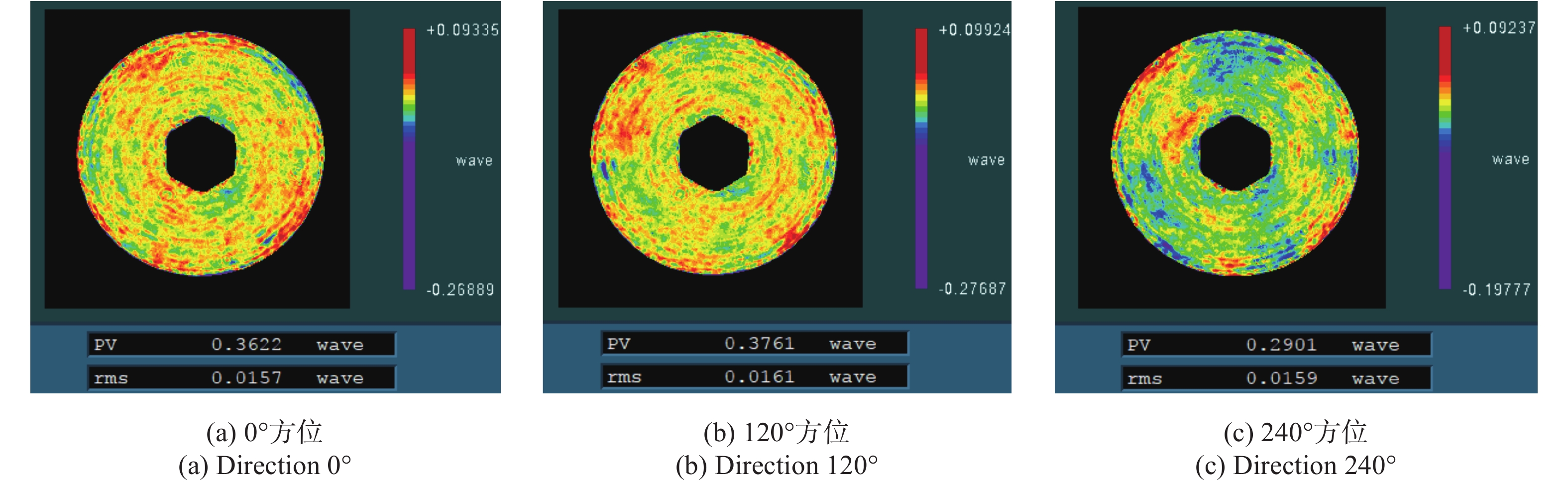
采用Zygo干涉仪对反射镜绕光轴三个方位(0°、120°及240°)下的面形分别进行检测,结果如图11所示。0°方位面形RMS为0.0157λ,120°方位面形RMS为0.0161λ,240°方位面形RMS为0.0159λ,差异小于0.001λ,且未出现仿真结果中重力导致的旋转大像散,说明该方法卸载后重力对反射镜面形的影响基本消除,实际卸载状态接近设计效果,保证了反射镜满足优于1/50λ的使用要求。

图 11 反射镜三方位实测面形图
Figure 11. Contour plot of surface error in 3 directions
-
文中针对某Φ1550 mm口径高轻量化SiC反射镜的地面面形检测问题提出了一种光轴水平状态下的重力卸载优化方法,具体阐述了卸载力相关参数(固定参数及优化参数)的确定方法,依据有限元仿真结果分析并总结了卸载力位置对重力作用下面形RMS的影响规律及快速优化要点,最终使面形RMS减小至0.00145λ,满足优于0.002λ的要求。将优化后参数应用于反射镜的地面检测,得到三个绕光轴旋转对称方位下的面形RMS均优于要求的1/50λ,且三者之间差异小于0.001λ,面形分布较为一致,证明了优化结果的有效性。该方法可高效实现大口径反射镜的高精度重力卸载优化,为其他大口径反射镜在工程应用中的高精度面形测定提供参考。
Optimization method for large-aperture space mirror’s gravity unload
-
摘要: 针对某Φ1550 mm口径高轻量化反射镜在轨面形误差RMS优于1/50λ (λ=632.8 nm)的高精度要求,为模拟在轨失重状态,降低反射镜光轴水平状态面形检测时重力的影响,对反射镜进行了多点主动支撑式重力卸载参数优化。首先,在反射镜分区的基础上,提出了卸载力大小、支撑点数量及轴向初始位置的确定原则;随后,建立反射镜的有限元模型,以重力与卸载力共同作用下主镜面形RMS优于0.002λ为目标,以卸载力轴向位置为参数进行仿真优化,通过对参数的影响规律分析总结出快速优化要点,实现优化过程的简化;最终使重力引起的面形误差RMS值减小至0.00145λ。将优化后参数应用于反射镜光轴水平状态的面形检测中,测得绕轴0°、120°、240°时面形RMS分别为0.0157λ、0.0161λ及0.0159λ,且面形分布较为一致,说明经卸载后重力对面形的影响被有效消除。所提出的重力卸载优化方法灵活高效,为实现大口径反射镜的高精度光学加工及在轨使用提供保障。Abstract: A Φ1550 mm aperture space mirror’s surface figure RMS was required to be superior to 1/50λ (λ=632.8 nm) under the zero-gravity orbit environment. In order to simulate the state of weightlessness and reduce the influence of gravity in the mirror’s surface figure test with horizontal optic axis, the mirror was actively supported by multiple forces to unload the gravity and the forces’ parameters were optimized. Firstly, the principle to determine the value, the number of support points and the initial axial position of each unload force was proposed based on dividing the mirror into blocks. Secondly, with the optimization goal of the mirror’s surface figure RMS be superior to 0.002λ under the function of gravity along with all unload forces, a structural FEM model was established. Taking the positions of all unload forces along the optic axis as optimal variables, influences on target were analyzed and quick optimization points were concluded to simplify the optimization. Finally, the mirror’s surface figure RMS when unloaded was found minimal of 0.00145λ. Putting the parameters of the optimization result into use of the surface figure test of the mirror with horizontal optic axis, it turned out that when the mirror revolved around the optic axis 0°, 120° and 240°, the surface figure RMS were 0.0157λ, 0.0161λ and 0.0159λ respectively and the figures were consistent, which proved that the gravity impact was eliminated effectively. The optimization method for gravity unload is flexible and efficient which guarantee the large-aperture mirror’s high-precision machining and space mission.
-
Key words:
- space mirror /
- large aperture /
- gravity unload /
- surface figure optimization
-
图 3 编号为i的双点支撑分区支点位置
Figure 3. Positions of the forces for double-point supporting block i
图 5
$ {T}_{{i}}=0 $ 时反射镜X向位移云图Figure 5. Contour plot of the mirror’s X displacement (
$ {T}_{{i}}=0 $ )
图 8 T=1.43 mm时反射镜X向位移云图
Figure 8. Contour plot of the mirror’s X displacement (T=1.43 mm)
表 1 不同规格分区的数量及卸载力大小
Table 1. Quantity and unload force of different mass blocks
Block number i 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 Unload force Fi/N 8.69 10.76 9.40 9.17 8.48 6.19 5.54 5.39 4.22 4.01 3.89 3.70 4.27 5.38 10.44 4.44 3.98 3.36 Quantity Ni 12 6  下载: 导出CSV
下载: 导出CSV
表 2 不同质量分区的等效镜体厚度
Table 2. Equivalent thickness of different mass blocks
Double-point supporting blocks Block number i 1 2 3 4 5 6 7 15 Equivalent thickness Hi/mm 128 163 146 148 136 99 87 160 Single-point supporting blocks Block number i 8 9 10 11 12 13 14 16 17 18 Equivalent thickness Hi/mm 44 69 64 63 59 42 39 73 63 50
下载: 导出CSV
表 3 三方位重力及卸载力作用下反射镜面形图
Table 3. Surface figure of the mirror with gravity unloaded or not in 3 directions
下载: 导出CSV
-
[1] 卢刚, 高磊, 王彦敏. 高景一号影像多方法融合效果评价分析[J]. 遥感信息, 2018, 33(6): 124-131. doi: 10.3969/j.issn.1000-3177.2018.06.018 Lu Gang, Gao Lei, Wang Yanmin. Evaluation and analysis on multiple fusion methods for GJ-1 satellite imagery [J]. Remote Sensing Information, 2018, 33(6): 124-131. (in Chinese) doi: 10.3969/j.issn.1000-3177.2018.06.018 [2] 徐伟, 金光, 王家骐. 吉林一号轻型高分辨率遥感卫星光学成像技术[J]. 光学 精密工程, 2017, 25(8): 1969-1978. doi: 10.3788/OPE.20172508.1969 Xu Wei, Jin Guang, Wang Jiaqi. Optical imaging technology of JL-1 lightweight high resolution multispectral remote sensing satellite [J]. Optics and Precision Engineering, 2017, 25(8): 1969-1978. (in Chinese) doi: 10.3788/OPE.20172508.1969 [3] 王小勇, 张博文, 郭崇岭, 等. 3 m口径空间反射镜的参数优化[J]. 红外与激光工程, 2019, 48(S1): S118002. Wang Xiaoyong, Zhang Bowen, Guo Chongling, et al. Parameter optimization of 3 m aperture space- based mirror [J]. Infrared and Laser Engineering, 2019, 48(S1): S118002. (in Chinese) [4] 李慎华, 关英俊, 辛宏伟, 等. 大口径空间反射镜轻量化设计及其柔性支撑[J]. 激光与红外, 2017, 47(11): 1422-1427. doi: 10.3969/j.issn.1001-5078.2017.11.017 Li Shenhua, Guan Yingjun, Xin Hongwei, et al. Lightweight design and flexible support of large diameter mirror in space camera [J]. Laser and Infrared, 2017, 47(11): 1422-1427. (in Chinese) doi: 10.3969/j.issn.1001-5078.2017.11.017 [5] 董得义, 庞新源, 张学军, 等. 空间大口径单体反射镜计量卸荷支撑研制中的关键技术[J]. 光学 精密工程, 2019, 27(10): 2165-2179. doi: 10.3788/OPE.20192710.2165 Dong Deyi, Pang Xinyuan, Zhang Xuejun, et al. Key technology in developing of metrology mount for large aperture monolithic space-based mirror [J]. Optics and Precision Engineering, 2019, 27(10): 2165-2179. (in Chinese) doi: 10.3788/OPE.20192710.2165 [6] 王克军, 董吉洪. 空间遥感器2 m量级大口径SiC 反射镜镜坯结构设计[J]. 红外与激光工程, 2017, 46(7): 0718005. Wang Kejun, Dong Jihong. Structural design of Φ2m-level large-diameter SiC reflector used in space remote sensor [J]. Infrared and Laser Engineering, 2017, 46(7): 0718005. (in Chinese) [7] 郭疆, 朱磊, 赵继, 等. 大口径空间反射镜大容差支撑结构设计与优化[J]. 光学 精密工程, 2019, 27(5): 1138-1147. doi: 10.3788/OPE.20192705.1138 Guo Jiang, Zhu Lei, Zhao Ji, et al. Design and optimize of high tolerance support structure for large aperture space mirror [J]. Optics and Precision Engineering, 2019, 27(5): 1138-1147. (in Chinese) doi: 10.3788/OPE.20192705.1138 [8] Montagino L A. Test and evaluation of the Hubble Space Telescope 2.4-meter primary mirror[C]//SPIE, 1985, 571: 182-190. [9] Besuner R W, Chow K P, Kendrick S E. Selective reinforcement of a 2 m-class lightweight mirror for horizontal beam optical testing[C]//SPIE, 2008, 7018: 701816. [10] Takao N, Hiroshi S, Takashi O, et al. The next-generation infrared astronomy mission SPICA under the new framework[C]//SPIE, 2014, 9143: 914311. [11] 张珑, 叶璐, 张金平, 等. 1.2 m轻量化空间反射镜的重力支撑变形分离[J]. 光子学报, 2018, 47(7): 0722002. doi: 10.3788/gzxb20184707.0722002 Zhang Long, Ye Lu, Zhang Jinping, et al. Gravity and support error separation of 1.2 m lightweight space mirror [J]. Acta Photonica Sinica, 2018, 47(7): 0722002. (in Chinese) doi: 10.3788/gzxb20184707.0722002 [12] 胡海飞, 赵宏伟, 刘振宇, 等. 4 m口径SiC反射镜原位检测用静压支撑系统[J]. 光学 精密工程, 2017, 25(10): 2607-2613. doi: 10.3788/OPE.20172510.2607 Hu Haifei, Zhao Hongwei, Liu Zhenyu, et al. Hydrostatic support system for in-situ optical testing of a 4 m aperture SiC mirror [J]. Optics and Precision Engineering, 2017, 25(10): 2607-2613. (in Chinese) doi: 10.3788/OPE.20172510.2607 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 469
- HTML全文浏览量: 101
- PDF下载量: 87
- 被引次数: 0






