












-
国家海洋权益的维护与国家主权和国家安全息息相关,是国民经济可持续发展的重要保障。近年来海上航运和渔业活动增多、海上侵权事件频发,为了维护海洋安全,迫切需要对海上船只进行监视监测。近些年来,随着光学遥感相机的发展,光学遥感图像因其幅宽大、分辨率高、噪声低、数据量大等优点,逐渐成为舰船检测的主流图像来源[1]。这些图像在海上搜救、海上交通监管等民用和军用领域都有所运用[2]。除了进行舰船的静态检测,还可以进行运动性能检测,对其运行速率和方位进行检测。在此应用需求下,设计了一种大视场间隔的双焦面延时成像遥感相机,既具有常规的面阵目标检测功能,还可通过双焦面延时成像实现动态检测功能,能够根据地面指挥系统的指令在轨检测运动目标(如海上舰船)并输出。
对于双通道或多通道相机的焦面装调,一般各通道之间的视轴夹角很小或者重合,而且只要求保证通道之间的相对关系,对其绝对位置关系没有严格要求,但是针对此文中应用的相机,还要保证两焦面探测器之间的关系,并得到准确的测试结果。之前在装调和测试多通道焦面器件时,一般有两种方法:一种方法是以经纬仪为基准,通过经纬仪瞄测器件的视轴矢量,通过空间的矢量关系计算各通道焦面之间的关系[3];另一种方法是以二维转台为基准,通过转台对相机的各视场进行成像测试,根据转台示值计算各通道焦面之间的关系。
因为在波长更长、效率更高的红光谱段和近红谱段上可以更容易地识别舰船目标,所以用于舰船检测的遥感相机有其特殊谱段要求,其谱段范围设计在红光谱段和近红外谱段。该谱段选择一般通过在器件上粘接对应谱段滤光膜来实现。其中红光谱段所占比重很小,主要是近红外谱段,超出了人眼可视范围,因此无法使用经纬仪瞄测到探测器,第一种方法不可行。第二种方法因为二维转台的精度直接影响焦面装调和测试精度,所以对二维转台的性能指标要求很高,导致二维转台研制成本很高。
文中针对上述局限性以及这类相机的特点,提出了一种利用一维转台进行焦面装调的方法,该方法能降低对转台精度的要求,而且避免了二维转台两轴的垂直度误差带来的系统误差,可以保证两焦面之间的装调和测试精度在亚像元级别。另外,在分析过程中,提出了一项未被重视的误差项,其可为相机探测器几何参数测试、畸变测试的误差处理提供参考。
-
遥感相机采用双焦面分视场设计,两个焦面组件对同一景物延时成像,再通过智能处理器进行双焦面目标检测处理,同时智能处理器也可对单焦面图像进行检测。双面阵检测模式下,两个焦面组件同时开机成像,并对双面阵图像进行在轨目标检测,最终输出运动目标的切片信息。如图1所示,当相机经一定时间间隔由位置1飞到位置2时,运动的舰船在两个焦面组件上所成图像位置会有变化,智能处理器根据该特性对两个焦面的图像实时进行处理,可检测出运动目标,便于海上执法监察。

图 1 基于双面阵相机的目标运动识别原理
Figure 1. Principle of target motion recognition based on dual focal plane camera
双面阵延时成像模式需要对两面阵焦面所成的图像进行处理。若两焦面之间视场相隔太远,就会增加相机镜头的光学尺寸,增大整机重量;若两面阵视场相隔太近,就无法检测出运动变化。相机为离轴三反光学系统,镜头的主要光学指标包括:焦距为350 mm,视场角为13.2°,相对孔径为1/5.38;谱段范围为650~900 nm;光学系统畸变小于0.44%。该相机采用CMOS面阵图像传感器,像元尺寸为3.5 μm,像元数量为23360×256个。两个面阵在飞行方向的视场角相差4.004°,飞行轨道高度为500 km,卫星相对地表的运动速度为7 km/s ,则相机的地面像元分辨率为5 m,双焦面对同一海域拍摄的图片有5 s的时间差。航速为20节的船只,航行速度约为10 m/s。船只5 s时间运动约50 m,表现在图像上是10个像元的变化,满足运动检测的要求。
双面阵相机光学系统光路如图2所示,光学系统由主镜、次镜、三镜和折转镜组成。

图 2 光学系统光路
Figure 2. Optical path of optical system
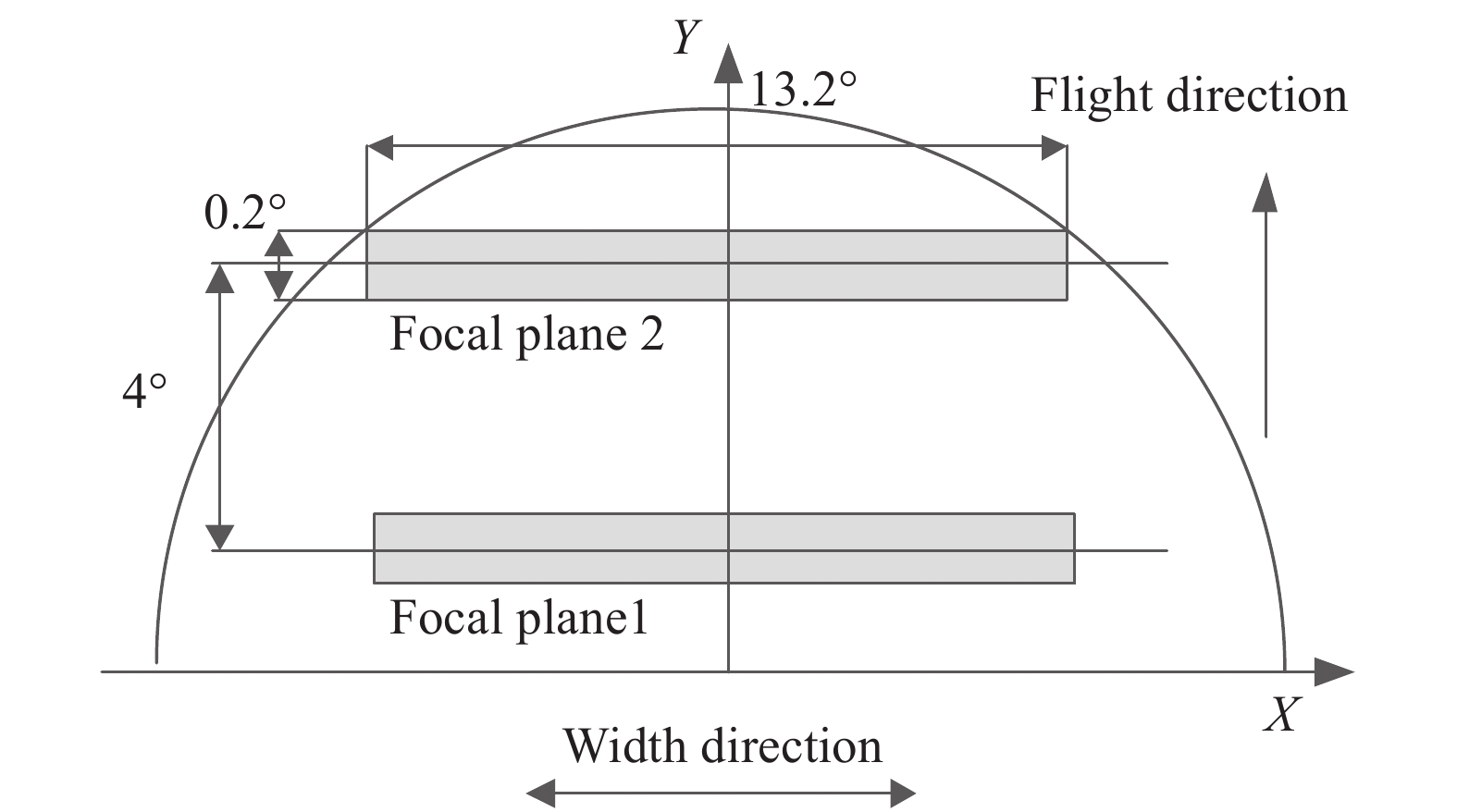
双面阵相机具有两个成像视场,光学系统视场设置示意图如图3所示。两视场区域幅宽方向等宽,均为13.2°;两视场区域在飞行方向的中心间隔4.004°,飞行方向视场等宽,均为0.2°。第一通道中心视场偏场角为6°,第二通道中心视场偏场角为10°。

图 3 光学系统视场设置示意图
Figure 3. Schematic diagram of optical system field of view setting
-
遥感相机工作的焦距相对于其成像距离而言,可以忽略不计,因此可认为相机是对无穷远目标成像。根据几何光学理论,无穷远点目标出射的光线,可以看作是与光轴成一定角度入射的平行光束,通过理想光学系统以后,相交于像方焦面上同一点,即成像在焦平面上某一点。当星点目标的入射角度相对相机光轴发生变化时,即入射视场角的变化,会使得星点成像在焦平面上的不同位置。
遥感相机的视场一般远大于装调设备(如平行光管)的视场,因此在地面实验室进行装调和测试时,需要借助转台完成相机全视场的扫描成像。常规的全视场模拟成像光路示意图如图4(a)所示。定义相机坐标系为XYZ,其中X方向为幅宽方向,Z方向为视轴方向,Y方向遵循笛卡尔右手坐标系要求。转台坐标系为XrYrZr,其中Xr为俯仰方向旋转轴,Yr为水平方向旋转轴,Zr方向遵循笛卡尔右手坐标系要求。光管只定义其视轴方向Z0。
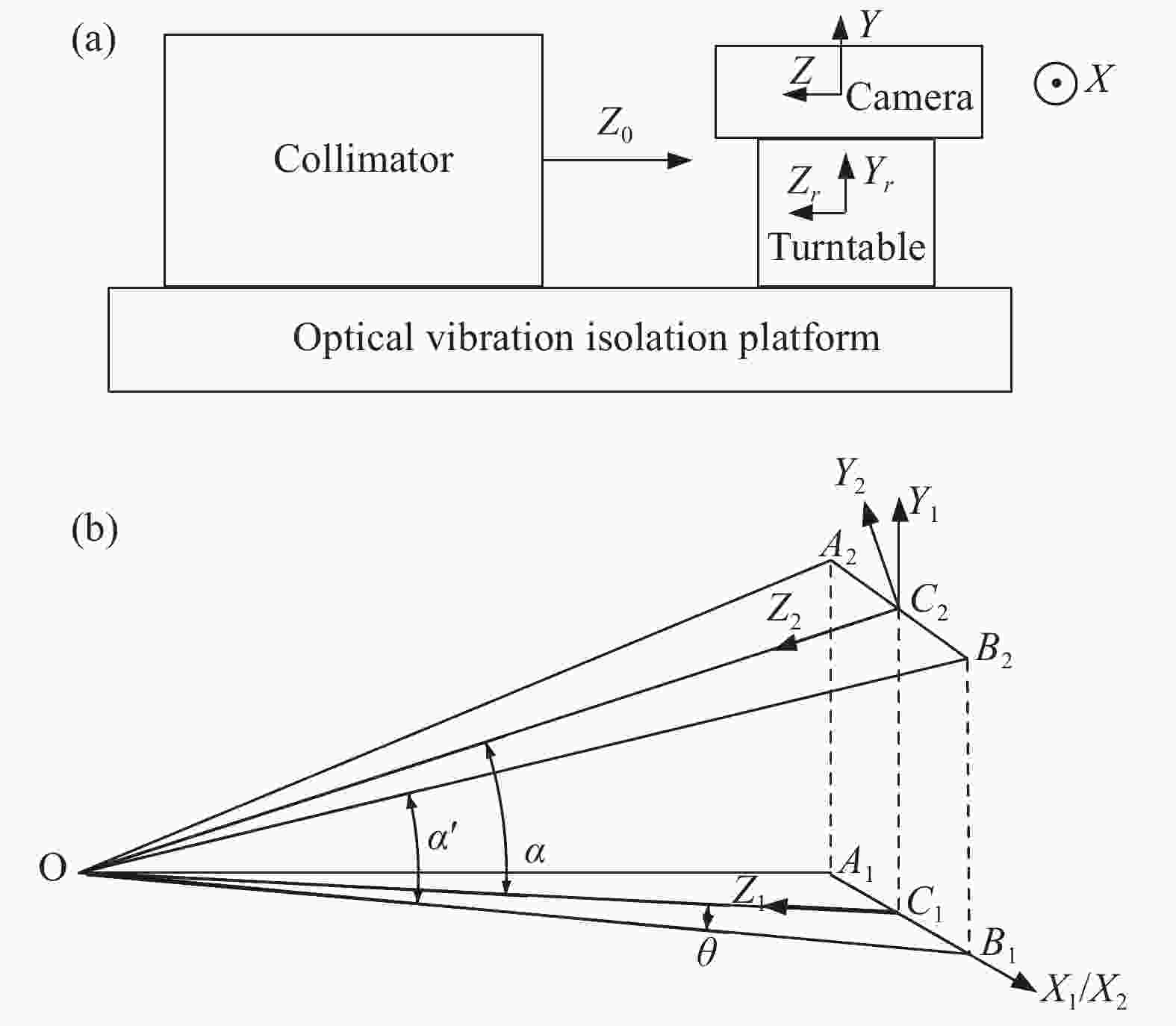
图 4 全视场模拟成像光路示意图. (a)实物示意图; (b)数学模型图
Figure 4. Schematic diagram of full field simulation imaging optical path. (a) Physical schematic diagram; (b) Mathematical model diagram
如图4(b)所示,将离轴双面阵相机简化为一个四棱锥体O-A1B1B2A2,其中C1和C2分别是两个焦面探测器的中心点,OC1、OC2分别是两个焦面的视轴Z1、Z2,A1B1、A2B2分别表示两个焦面的中心线阵,A1B1∥A2B2。设两焦面的视轴夹角∠C1OC0=α,Y向视场夹角∠B1OB2=
$\alpha '$ ,X向视场角∠B0OC0=θ。根据直角三角形ΔC1OC2、ΔB1OC1和ΔB1OB2的三角函数关系,有:
$$\begin{gathered} \overline {{B_1}{B_2}} = \overline {{C_1}{C_2}} {\rm{ = }}\overline {O{C_1}} \cdot \tan \alpha \\ \overline {O{B_1}} = \overline {O{C_{\rm{1}}}} /{\rm{cos}}\theta \\ \end{gathered} $$ (1) 可以得到两焦面线阵对应的Y向视场夹角为:
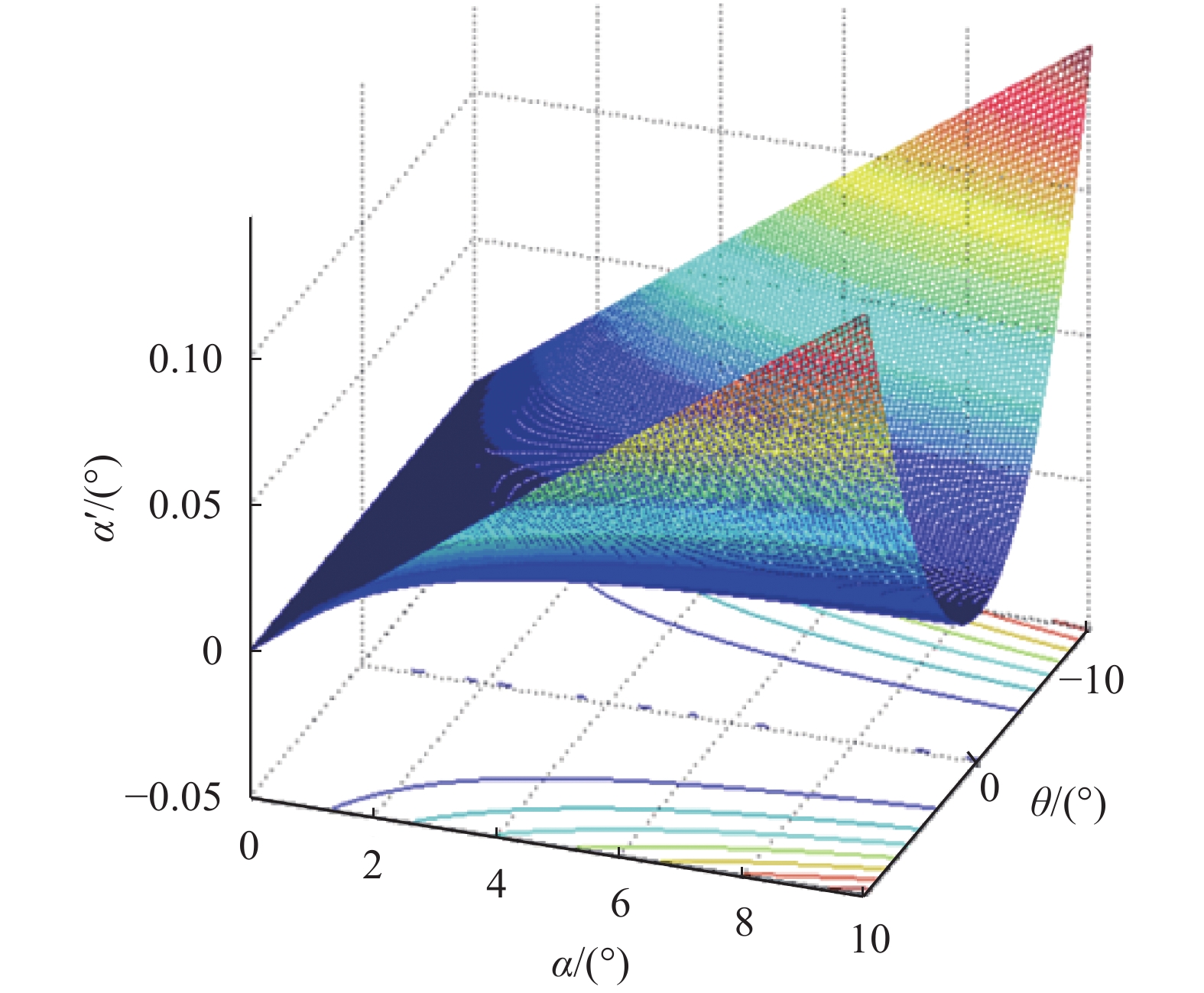
$$\alpha ' = \arctan \frac{{\overline {{B_1}{B_2}} }}{{\overline {O{B_1}} }} = \arctan (\cos \theta \cdot \tan {\alpha _{}})$$ (2) 由公式(2)可知两焦面在不同X向视场对应的Y向视场角差不是一个定值,而是如图5所示的与θ和α角有关的变量。

图 5 α’角与θ和α角的对应关系
Figure 5. Correspondence between α’and θ and α
当相机与转台发生相对旋转时,光管从不同角度入射到相机中,光管所装靶标成像在焦面图像的不同位置,这些位置的集合称为靶标的成像轨迹。这些轨迹是焦面装调的重要依据。因此,需要研究这些轨迹的形成规律。
要使平行光管的星点靶标成像在相机焦面中心C2上,其Z0轴与焦面对应的视轴Z2需要共轴。要使平行光管的星点靶标的成像轨迹为A2B2,就要使相机绕着Y2轴旋转,即相机视轴(Z2轴)与转台方位旋转轴(Yr轴)正交。如果相机视轴(Z2轴)与转台方位旋转轴(Yr轴)正交,比如相机是绕着Y1轴旋转的,星点将一直以α角度偏移入射,根据公式(3)可以看出,星点的成像轨迹将为一条曲线,且在Y向与A2B2的偏移量为:
$${y_s} \!=\! {f_s} \cdot \tan \alpha \!- \!{f_s} \cdot \tan \alpha ' \!=\! f \cdot \tan [\alpha \!-\! \arctan (\cos \theta \cdot \tan \alpha )]$$ (3) 式中: f为相机焦距;fs为相机沿视轴上的等效焦距。
由以上分析可知,虽然开始时光管与相机的相对关系固定,但是转台转轴不一样,使得星点在焦面上的成像轨迹是不一样的。国内外各研究机构进行畸变测试均基于经典的精密测角法,也是基于类似光路原理,也存在类似的原理误差,但却一直未被重视[4-5]。分析其原因是,遥感相机大部分采用线阵CCD推扫成像,因此畸变测试只关注一维X方向的测试[6]。即便是需要测二维方向的畸变,一般会将转台旋转面和星点出射方向都调整到与大地水平或接近水平方向,即相机视轴(Z轴)与转台方位旋转轴(Yr轴)正交或近似正交状态,即α很小,从图5中可以看出此时α’也小,该原理误差对测试结果影响很小[7-8]。但是此误差是客观存在的,尤其针对文中这种大视场差的双焦面离轴相机,使用文中的装调方法切换两个焦面时,在测某一个焦面时,其α很大,此误差值就不可忽视了。在实际测试时需考虑这部分原理误差。
-
为了保证双面阵检测模式下对船只运动检测的准确性,不仅需要保证单面阵与卫星坐标系之间的关系,还需要保证双面阵之间的相对关系,包括双面阵之间的角度和平行性,并且需要准确测试出两面阵对应点的角度关系,作为在轨辨别船只运动方向和速度时的重要参考。
为了模拟相机实际成像情况,需要两条相隔一定角度(文中为4.004°)的平行直线上的若干点目标,这两条直线分别成像在两个通道的焦面探测器上,且对应点成像在同名像元上,就说明两焦面之间关系准确。选用怎样的转台才能保证高精度呢?
相机和转台不动,通过调整星点模拟器的俯仰来切换两通道的视场,以下称方案一。而若是采用二维转台,则是平行光管不动,由相机和转台一起俯仰来切换两个通道的视场,以下称方案二。假定一维转台和二维转台对应的各项性能指标均一致。方案一的星点只是一个点目标,点目标在X方向的旋转误差不会影响相机,不会带来额外误差。而方案二比方案一多一项误差源,即转台两轴之间的垂直度,高精度转台的垂直度误差一般为5″。该垂直度误差会直接导致两个通道切换时相机姿态的差异。
文中实际选用的是一维转台,因此最终选定装调方案一。另一个方向可通过调整平行光管的姿态来切换两个通道的视场,最终实现二维转台的效果。这种方法的优点是,可以节约资源成本,同时不会引入转台自身的垂直度误差,简化装调过程。
-
第一通道装调时,如图6(a)所示,将该通道焦面视轴调整到与一维转台转轴(Yr轴)垂直后固定,再将星点模拟器出射方向Z0调整到与转台转轴(Y轴)垂直,即与第一通道焦面视轴(Z1轴)平行,此时将转台示值清零。这样,转动一维转台时,可以看到星点成像在焦面幅宽方向的不同位置。分别逆时针转动和顺时针转动θ角,记录下焦面上的星点图像的质心位置
$({x_{1L}},{y_{1L}}),({x_{1R}},{y_{1R}})$ 。
图 6 (a)第一通道装调示意图;(b)第二通道装调示意图
Figure 6. (a) Alignment diagram of focal plane 1; (b) Alignment diagram of focal plane 2
根据两端质心位置,调整焦面器件位置,是两端质心位于焦面Y向中心,即:
$$\begin{gathered} {x_{1L}} = {N_x} - {x_{1R}} \\ {y_{1L}} = {y_{1R}} = {N_y}/2 \\ \end{gathered} $$ (4) 式中:
${N_x}$ 和${N_y}$ 分别为焦面器件在两个方向的像元总数。第二通道装调时,如图6(b)所示,相机和转台保持固定不动,用经纬仪测量星点模拟器出射方向,通过调整两个升降台的高度,使其在飞行方向与一维转台Z轴成4.004°夹角,幅宽方向保持不变。这样,转动一维转台时,可以看到星点成像在第二通道焦面幅宽方向的不同位置。分别逆时针转动和顺时针转动θ角,记录下焦面上的星点图像的质心位置
$({X_{2L}},{Y_{2L}}), $ $ ({X_{2R}},{Y_{2R}})$ 。同样根据上述公式调整焦面器件位置。这个通道会有偏移量的因素,因此装调时需保证下式:$$\begin{gathered} {x_{2L}} = {N_x} - {x_{2R}} \\ {y_{2L}} = {y_{2R}} = {N_y}/2{\rm{ + }}{N_{\rm{s}}} \\ \end{gathered} $$ (5) 式中:
${N_x}$ 和${N_y}$ 分别为焦面器件在两个方向的像元总数;${N_{\rm{s}}}$ 为对应的补偿值,${N_{\rm{s}}} = {y_s}/d$ ,d为焦面探测器像元尺寸。调好后,既保证了两焦面之间的平行度,又保证了两者之间的视场差。然后,可以测试两通道焦面之间各个像元直接之间的对应差值
$(\Delta {x_{2 - 1}},\Delta {y_{2 - 1}})$ ,单位为mm。每间隔一定角度旋转转台,得到对应的像点质心位置。测试得到的数据组为$ \left({\theta }_{1i},{x}_{1i},{y}_{1i}\right)$ 和$ \left({\theta }_{2i},{x}_{2i}, $ $ {y}_{2i}\right)$ 。其中,${\theta _{1i}}$ 为第一通道焦面的转台转角示值和对应的焦面器件上的星点像质心位置$\left( {{x_{1i}},{y_{1i}}} \right)$ ;${\theta _{2i}}$ 为第二通道焦面的转台转角示值和对应的焦面器件上的星点像质心位置$\left( {{x_{2i}},{y_{2i}}} \right)$ 。第二通道的质心测试结果中已包含光路原理误差的影响,需要将其从测试结果中剔除,即:$${y_{2i}}' = {y_{2i}} + {y_s} = {y_{2i}} + f \cdot \tan [\alpha - \arctan (\cos \theta \cdot \tan \alpha )]$$ (6) -
两焦面间的装调测试精度主要取决于焦面质心测量结果、设备误差和该方法的系统误差的综合。
(1)质心测试误差。焦面质心测量精度优于0.1像元,即:
$\Delta {y_1} = 0.35\;{\rm{\text{μ} m}} $ 。(2)系统误差。根据系统误差公式和误差分析原理[9],公式(3)系统误差为:
$$\begin{split} \Delta {y_2}\! =& \!\dfrac{{\partial {y_{\rm{s}}}}}{{\partial \theta }} \cdot \! \Delta \theta \!+\! \!\dfrac{{\partial {y_{\rm{s}}}}}{{\partial \alpha }} \cdot \Delta \alpha \!\! =\! f \cdot \sin \theta \!\cdot \tan \alpha \cdot (1 \!+ \!\!{\cos ^2}\theta \! \cdot {\tan ^2}\alpha )\Delta \theta \! +\\ &f \cdot \left[ {1 - } \right.\left. {\frac{{\cos \theta }}{{{{\cos }^2}\alpha \cdot (1 + {{\cos }^2}\theta \cdot {{\tan }^2}\alpha )}}} \right] \cdot \Delta \alpha \end{split}$$ (7) 式中:
$\Delta \theta $ 为转台水平转动误差值;$\Delta \alpha $ 为转台Z轴与星点出射方向夹角测试误差。1)转台水平转动误差。由计量单位标定的一维转台的误差参数见表1。
表 1 一维转台的误差参数
Table 1. Error parameters of one-dimensional turntable
Error term Error value/(″) Angular rotation error (P-V) 1 Displacement angle resolution 0.07 Angular displacement repeatability 1.5 Indication accuracy (P-V) 1 根据独立变量的误差传递公式得到转台综合误差:
$ \Delta \theta =\sqrt{{1}^{2}+{0.07}^{2}+{1.5}^{2}+{1}^{2}}=2''$ 。2)夹角测试误差,即经纬仪测角误差。由计量单位标定的经纬仪测角误差为±0.5″,考虑转台、相机调整时各需要使用经纬仪测试1次,切换两个焦面成像时需要使用经纬仪测试2次。一共需要测试4次。
取4次测试误差作为经纬仪综合误差:
$ \Delta \alpha = $ $ \sqrt{4\times {1}^{2}}=2''$ 。3)系统误差结果。又由相机参数,有:
$f = 350\;{\rm{mm}} $ ,$ \alpha = {4^ \circ }, \theta ={6.6^ \circ }$ 。公式(7)可得:
$\Delta {y_2} = 0.18$ μm。(3)综合误差。装调测试精度为:
$$\Delta y = \sqrt {\Delta {y}_1^2{\rm{ + }}\Delta {y}_2^2} = 0.39\;{{{\text{μ}}{\rm m}}}$$ 综上,文中提出的装调测试方案的测试精度优于0.39 μm (0.1 pixel)。该误差是一次测量误差,可以通过多次测量取平均值的方法减小测试误差。
-
对相机进行了实物装调,装调现场如图7所示。取
$\theta {\rm{ = }} \pm {6.5^ \circ }$ ,α=4.004°,分别对两个焦面的两点进行了测试,这两点在两通道上的成像像元质心偏差见表2,两通道之间的平行度偏差测试结果为1.0 μm(0.28 pixel)。
图 7 装调现场图片
Figure 7. Picture of optical-mechanical assembly
表 2 两焦面平行度偏差测试结果
Table 2. Test results of parallelism deviation of two focal planes
θ=−6.5° θ=+6.5° Difference between two ends of centroid Position of Y centroid of focal plane 1 ${y_{1L}}$=128.05 pixel ${y_{1R}}$=128.25 pixel 0.2 pixel Position of Y centroid of focal plane 2 ${y_{2L}}$=81.88 pixel ${y_{2R}}$=81.16 pixel 0.28 pixel -
装调完成后,取
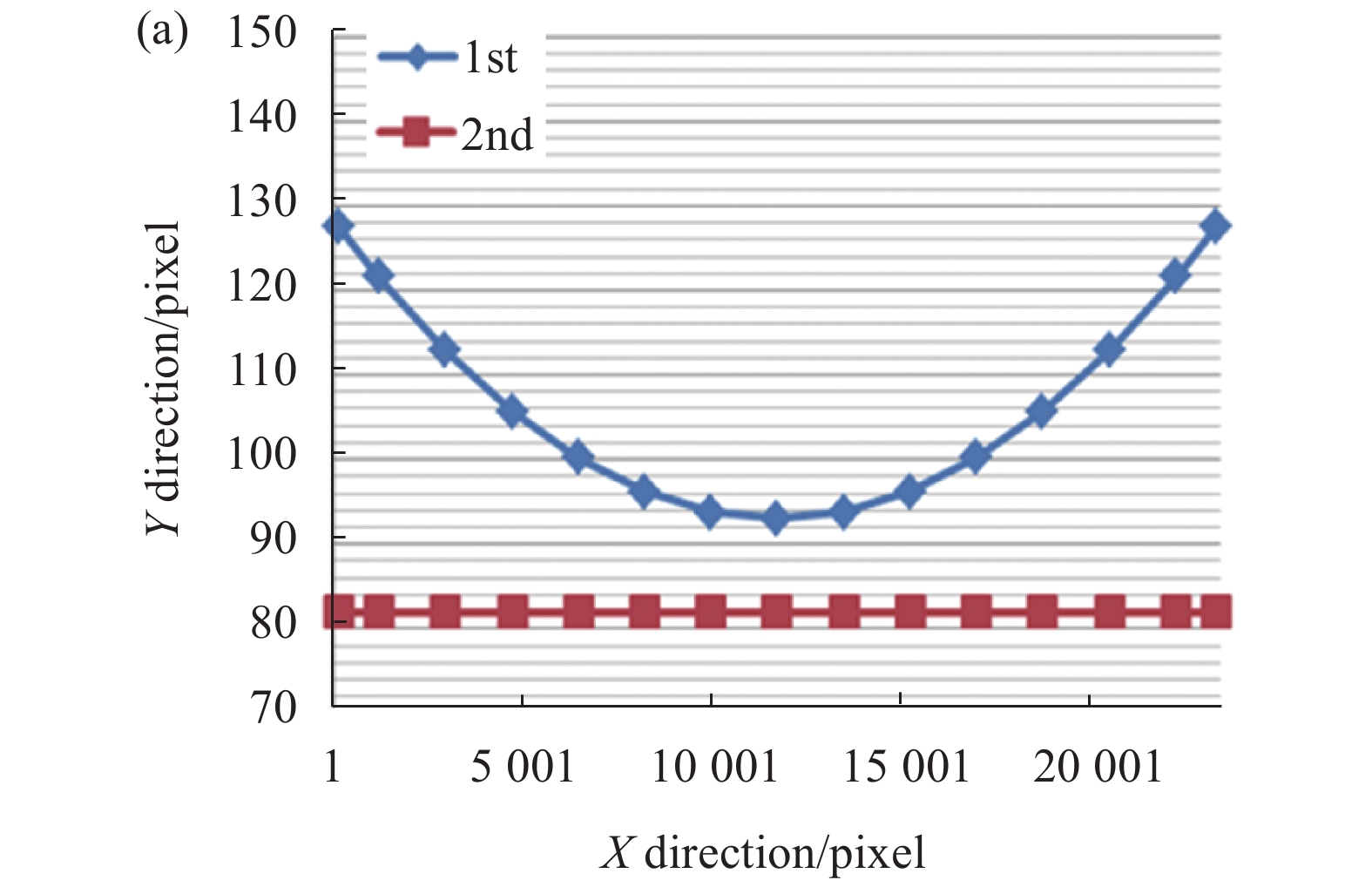
$ \theta \rm{=}\pm 6.6^ \circ ,\pm 6^ \circ ,\pm 5^ \circ ,\pm 4^ \circ ,\pm 3^ \circ \pm 2^ \circ ,\pm 1^ \circ , $ $ 0^ \circ $ 和α=4.004°的15个点分别选用方案一和二对两个焦面进行了测试。方案一测得的两焦面对应关系如图8(a)所示,第一通道为曲线,第二通道基本为一条直线。这与第2节的分析结论正好相反。经研究后发现,这是因为之前的理论分析都是将相机当作理想成像系统,但实际相机是有像差的。由光路的原理误差和相机第二通道的畸变光路曲线正好互补成一条直线。而第一通道只受到了畸变的影响,故变成了曲线。按公式(7)的标定参数剔除光路原理误差后的两焦面对应关系如图8(b)所示,该结果相机镜头的光学设计结果基本是一致的。
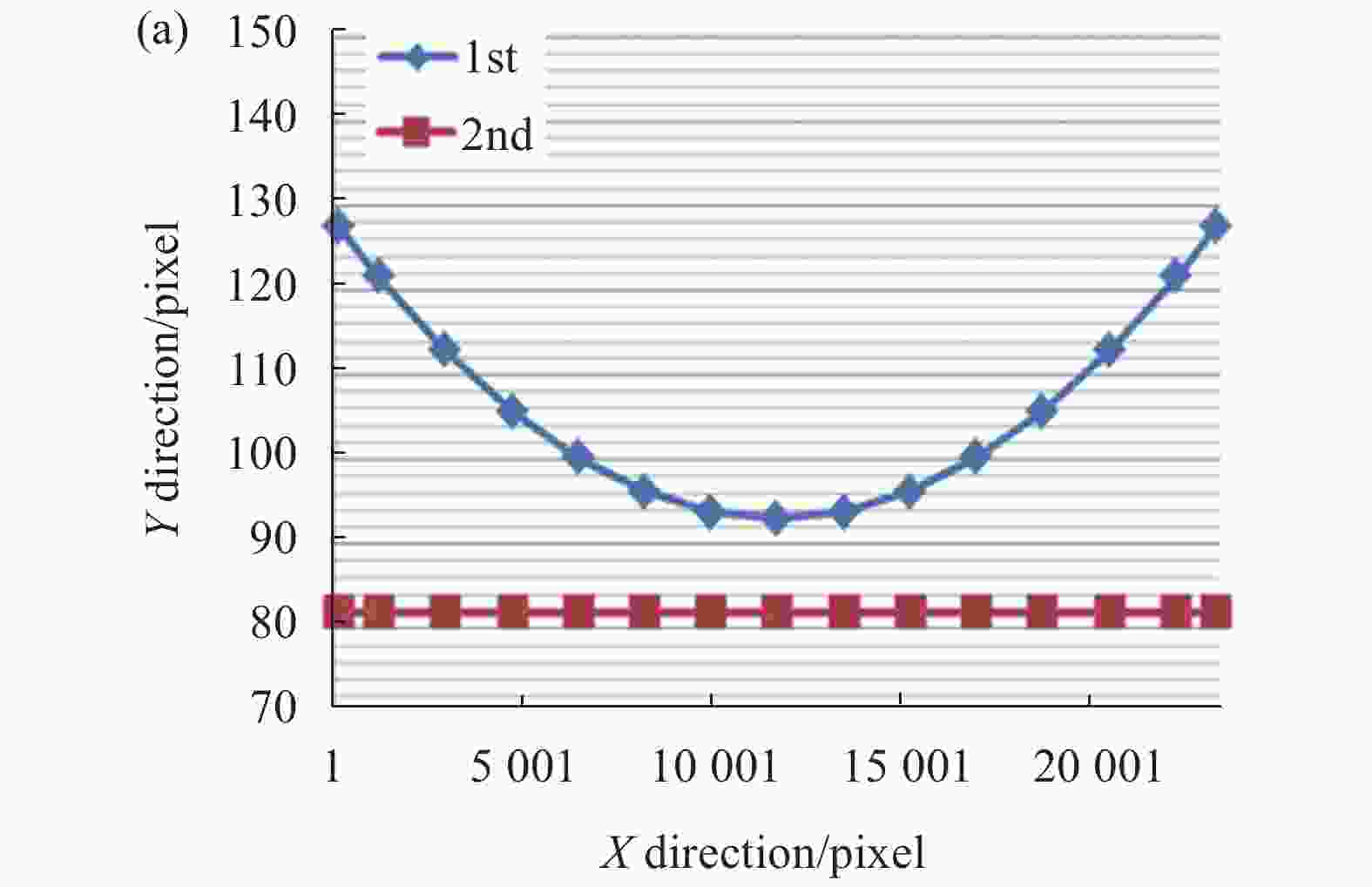
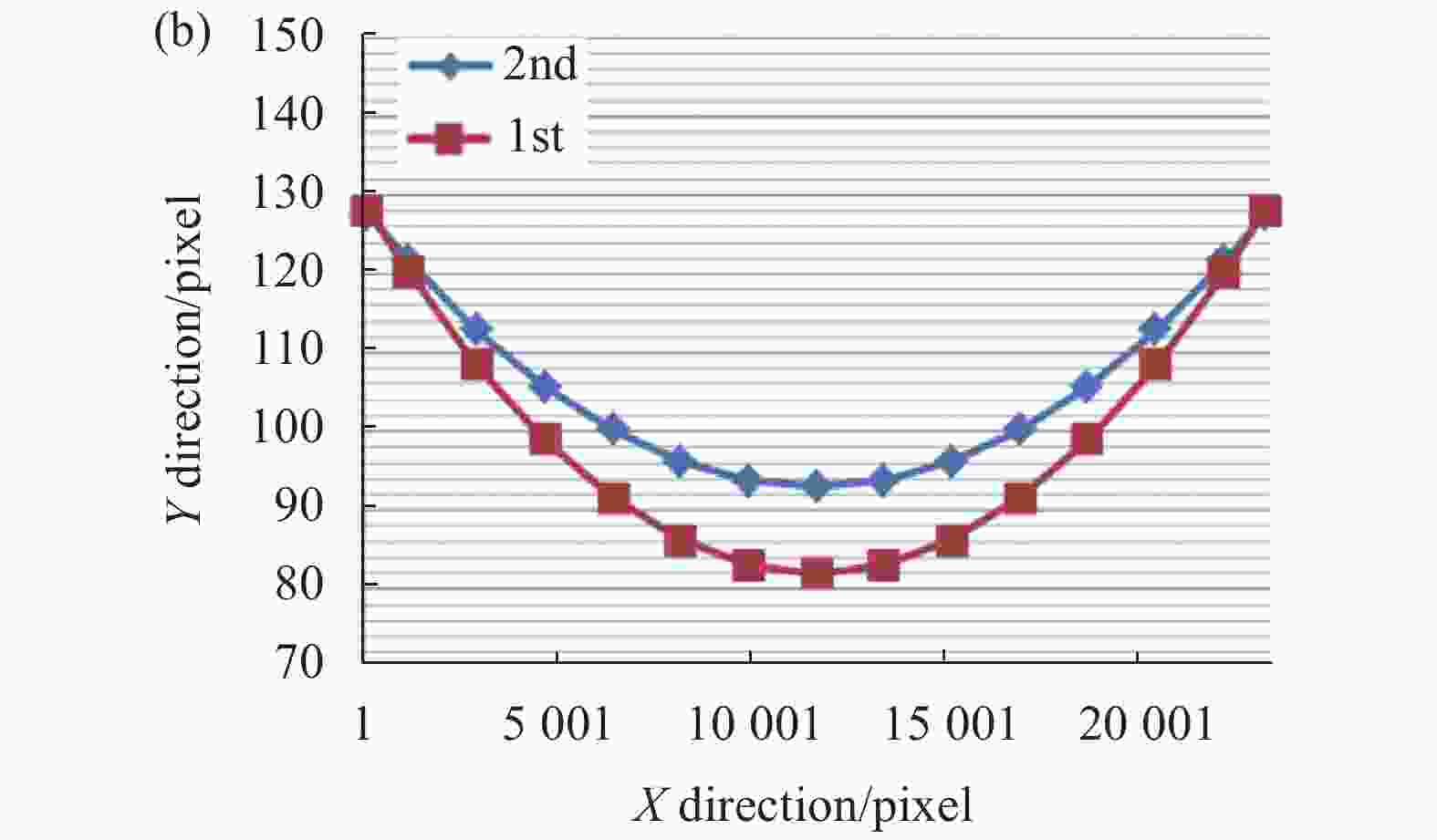
图 8 双焦面装调测试结果。(a)实测曲线图;(b)加入标定参数后曲线图
Figure 8. Test results of dual focal plane alignment. (a) Measured curve; (b) Curve after adding calibration parameters
方案二测得的两焦面对应关系与图8(b)的结果也是基本一致的。这说明文中的装调方案和标定参数都是正确的。
-
文中数学模型分析为有视场差的多通道焦面的装调提出了准确的原理误差消除参数。使用一维转台代替二维转台,剔除了二维转台两轴不垂直度的影响,装调精度高,而且成本低,减少了对装调设备的资源需求。试验结果表明,装调方法合理可行,成本低,装调精度优于0.3个像元,可应用于以后类似大视场差焦面的装调工作,具有很好的工程应用价值,同时还可为提高畸变测试精度提供新的思路。
Focal plane alignment for remote sensing camera with dual focal plane of large field of view interval
-
摘要: 大视场间隔的双通道面阵焦面相机在以往的遥感相机中比较少见,其工作在近红外谱段,应用在可见谱段的多通道相机装调方法不再适用,对其装调方法进行了研究。首先,从光学角度分析装调原理,抽象出了数学模型进行了详细分析,得到系统误差公式。因为在以往的光学装调中,该系统误差很小而一直未被重视,但是对于此处涉及的遥感相机,其误差已严重影响测试精度。之后,进行了装调测试方案的详细分析,提出采用一维转台的测试方案,其相比二维转台方案的误差源更少,精度更高,且可节约资源。最后,进行了实际的装调测试和数据处理分析,从中剔除系统误差影响,焦面装调精度为1.0 μm,装调结果优于0.3个像元,得到的焦面的星点像曲线与理论设计结果基本一致。结果表明,提出的测试方法精度高,装调方案合理可行。Abstract: The dual channel array focal plane camera with large field of view interval is rare in the previous types of remote sensing cameras. Since it works in the near-infrared spectrum segment, the alignment method of multi-channel camera previously applied in the visible spectrum segment is no longer applicable. The installation and adjustment method was studied. Firstly, the alignment principle was analyzed from the optical point of view, the mathematical model was abstracted and analyzed in detail, and the system error formula was obtained. In the past, the error of this system was very small and had not been paid attention to, but for the remote sensing camera here, its error had seriously affected the test accuracy. After that, the detailed analysis of the alignment test scheme was carried out, and the test scheme of one-dimensional turntable was proposed. Compared with the two-dimensional turntable scheme, the error source was less, the accuracy was higher, and the resources could be saved. Finally, the actual alignment test and test data processing were carried out to eliminate the influence of system error. The adjustment accuracy of focal plane was 1.0 μm, and the alignment result was better than 0.3 pixels. The star point image curve of focal plane obtained was basically consistent with the theoretical design result. The results show that the test method proposed has high precision and adjustment scheme is reasonable and feasible.
-
图 1 基于双面阵相机的目标运动识别原理
Figure 1. Principle of target motion recognition based on dual focal plane camera
图 4 全视场模拟成像光路示意图. (a)实物示意图; (b)数学模型图
Figure 4. Schematic diagram of full field simulation imaging optical path. (a) Physical schematic diagram; (b) Mathematical model diagram
图 6 (a)第一通道装调示意图;(b)第二通道装调示意图
Figure 6. (a) Alignment diagram of focal plane 1; (b) Alignment diagram of focal plane 2
图 8 双焦面装调测试结果。(a)实测曲线图;(b)加入标定参数后曲线图
Figure 8. Test results of dual focal plane alignment. (a) Measured curve; (b) Curve after adding calibration parameters
表 1 一维转台的误差参数
Table 1. Error parameters of one-dimensional turntable
Error term Error value/(″) Angular rotation error (P-V) 1 Displacement angle resolution 0.07 Angular displacement repeatability 1.5 Indication accuracy (P-V) 1  下载: 导出CSV
下载: 导出CSV
表 2 两焦面平行度偏差测试结果
Table 2. Test results of parallelism deviation of two focal planes
θ=−6.5° θ=+6.5° Difference between two ends of centroid Position of Y centroid of focal plane 1 ${y_{1L}}$ =128.05 pixel${y_{1R}}$ =128.25 pixel0.2 pixel Position of Y centroid of focal plane 2 ${y_{2L}}$ =81.88 pixel${y_{2R}}$ =81.16 pixel0.28 pixel
下载: 导出CSV
-
[1] 赵英海, 吴秀清, 闻凌云, 等. 可见光遥感图像中舰船目标检测方法[J]. 光电工程, 2008, 35(8): 102-106. doi: 10.3969/j.issn.1003-501X.2008.08.021 Zhao Yinghai, Wu Xiuqing, Wen Lingyun, et al. Ship target detection scheme for optical remote sensing images [J]. Opto-Electronic Engineering, 2008, 35(8): 102-106. (in Chinese) doi: 10.3969/j.issn.1003-501X.2008.08.021 [2] 徐伟, 陈彦彤, 朴永杰, 等. 基于吉林一号遥感图像的星载目标快速识别系统[J]. 光学 精密工程, 2017, 25(1): 255-262. doi: 10.3788/OPE.20172501.0255 Xu Wei, Chen Yantong, Piao Yongjie, et al. Target fast matching recognition of on-board system based on Jilin-1 satellite image [J]. Optics and Precision Engineering, 2017, 25(1): 255-262. (in Chinese) doi: 10.3788/OPE.20172501.0255 [3] 贾馨, 范龙飞, 苗洋, 等. 九谱段离轴长线阵相机视轴建模分析[J]. 红外与激光工程, 2019, 48(4): 0417007. doi: 10.3788/IRLA201948.0417007 Jia Xin, Fan Longfei, Miao Yang, et al. Modeling analysis of axis angle for nine-spectrum off-axis large-aperture assay camera [J]. Infrared and Laser Engineering, 2019, 48(4): 0417007. (in Chinese) doi: 10.3788/IRLA201948.0417007 [4] 吴国栋, 韩冰, 何煦. 精密测角法的线阵CCD相机几何参数实验室标定方法[J]. 光学 精密工程, 2007, 15(10): 1628-1632. Wu Guodong, Han Bing, He Xu. Calibration of geometric parameters of line-array CCD camera based on exact measuring angle in lab [J]. Optics and Precision Engineering, 2007, 15(10): 1628-1632. (in Chinese) [5] 伏瑞敏, 张元明, 张继友. 传输型线阵测绘相机几何精度标定方法[J]. 航天返回与遥感, 2011, 32(6): 62-67. doi: 10.3969/j.issn.1009-8518.2011.06.013 Fu Ruimin, Zhang Yuanming, Zhang Jiyou. Study on geometric measurement methods for line-array stereo mapping camera [J]. Spacecraft Recovery & Remote Sensing, 2011, 32(6): 62-67. (in Chinese) doi: 10.3969/j.issn.1009-8518.2011.06.013 [6] 远国勤, 郑丽娜, 张洪文, 等. 线阵相机二维高精度内方位元素标定[J]. 光学 精密工程, 2019, 27(8): 1901-1907. doi: 10.3788/OPE.20192708.1901 Yuan Guoqin, Zheng Li'na, Zhang Hongwen, et al. Multi-dimensional high-precision calibration method for line-scan camera [J]. Optics and Precision Engineering, 2019, 27(8): 1901-1907. (in Chinese) doi: 10.3788/OPE.20192708.1901 [7] 李重阳, 董欣, 岳丽清, 等. 航天大视场遥感相机畸变测试方法[J]. 红外与激光工程, 2018, 47(11): 1117003. doi: 10.3788/IRLA201847.1117003 Li Chongyang, Dong Xin, Yue Liqing, et al. Testing method of distortion for space remote sensing camera with large field of view [J]. Infrared and Laser Engineering, 2018, 47(11): 1117003. (in Chinese) doi: 10.3788/IRLA201847.1117003 [8] 吴国栋. 一种三线阵测绘相机CCD像面的装调方法[J]. 仪器仪表学报, 2009, 30(11): 2395-2398. doi: 10.3321/j.issn:0254-3087.2009.11.027 Wu Guodong. Alignment method of CCD image plane for three-line array mapping camera [J]. Chinese Journal of Scientific Instrument, 2009, 30(11): 2395-2398. (in Chinese) doi: 10.3321/j.issn:0254-3087.2009.11.027 [9] 沙定国. 误差分析与测量不确定度评定[M]. 北京: 中国计量出版社, 2003: 98-99. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 584
- HTML全文浏览量: 219
- PDF下载量: 48
- 被引次数: 0







































