








-
临近空间是距地表20~100 km的空域。随着空间探测竞争越来越激烈,许多学者将目光投向临近空间。临近空间观测在军事战略和科学观测领域具有广阔的发展前景。临近空间望远镜观测具有反馈快、成本低、可回收多次利用等优点,为行星探测提供了得天独厚的机会,是未来科学家进行行星科学观测的极佳方式,具有广阔的应用前景[1]。
针对临近空间望远镜研究,欧美国家起步较早并且对多颗行星进行成功观测。由NASA研制的BOPPS望远镜在2014年对几颗彗星进行观测,获得了CO2和H2O的丰度和比例[2];由欧洲几个国家的实验室共同研制的SUNRISE望远镜在2009年和2013年分别对太阳进行两次观测并成功研究了太阳磁场的结构和动力学[3];日本为研究观测行星、大气和等离子体,在2012年发射了风神系列望远镜,虽然没有成功,但是为亚洲临近空间球载望远镜观测奠定了基础[4]。我国在临近空间望远镜观测方面基本属于空白状态,中国科学院立项研制临近空间球载望远镜,旨在对像金星、木星等行星环境进行观测研究。次镜作为临近空间望远镜中重要光学元件之一,其位于望远镜的最前端,距离主承力二维转台照准架最远,同时对于临近空间大范围温度变化最为敏感,承受温度载荷变化最大,所以在临近空间力热环境剧烈变化下保证次镜的面形精度和位置精度是影响系统成像质量的关键。次镜组件相对较小,通常对其质量要求较为严格。次镜组件应满足用最简单的设计来满足面形精度的要求。次镜轻量化结构大致分为三角形、扇形、六边形、圆形等,支撑结构基本上采用中心支撑和三点支撑两种方式。SOFIA望远镜次镜采用口径为350 mm的SiC反射镜,其采用三角形轻量化孔并且进行削边轻量化设计[5]。临近空间载荷在整个制造、发射和在轨工作阶段要经历加速度、重力、冲击和高低温变化等影响,保证次镜组件在力热耦合作用下的面形精度在允差范围以内是光学元件设计的基本要求。
文中针对临近空间望远镜次镜组件进行优化设计,次镜组件质量不超过2 kg,面形精度优于λ/50,同时基频要高于120 Hz来保证飞行、观测过程中的稳定性。采用实体结构与基结构优化相结合的方法对次镜进行优化设计,选择轻量化率高、可加工性强的扇形结构并对其进行集成优化。反射镜组件由镜体、锥套、柔节构成,通过综合评价因子对柔节参数进行优化来使反射镜组件面形满足指标要求。最后通过仿真分析对次镜在重力、温度、装配误差下的面形,过载工况下的强度进行验证。
-
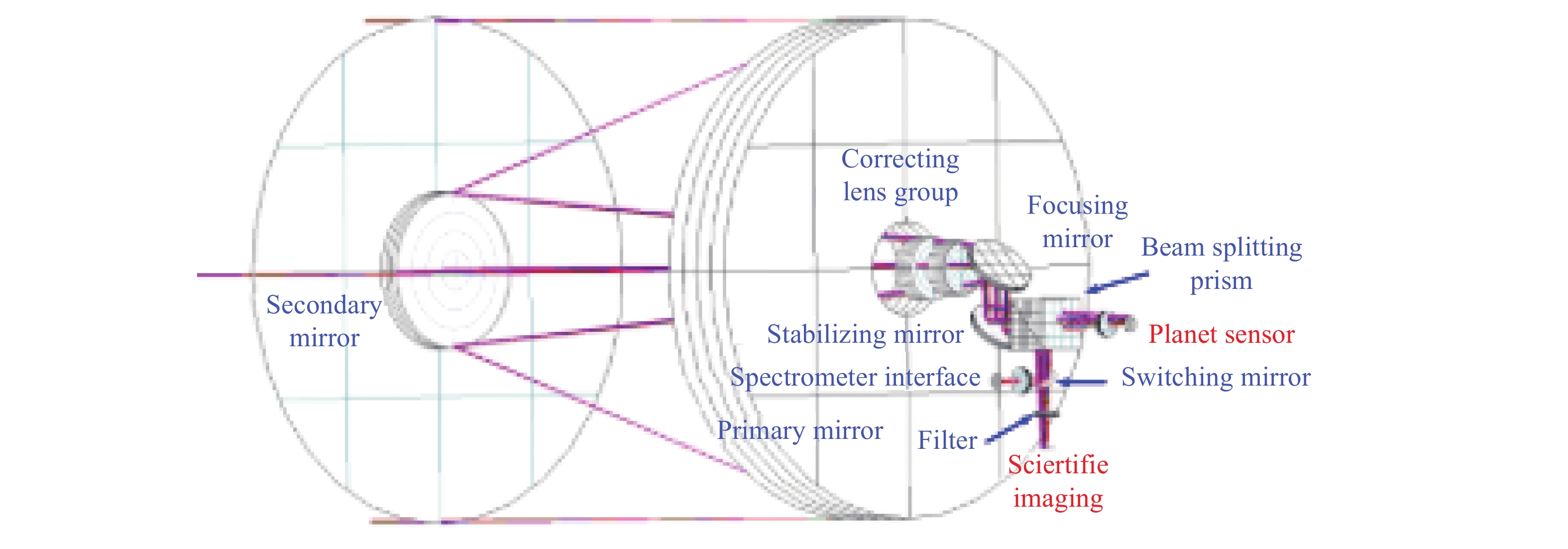
临近空间望远镜采用R-C光学系统,次镜采用非球面凸镜,可以获得0.5″的角分辨率。光学系统如图1所示,临近空间球载望远镜光谱范围是紫外光到可见光(280~680 nm),主次镜间间距为957 mm,整个光学系统的间距为1500 mm,次镜通光口径为250 mm,曲率半径为1120 mm[6]。次镜面形精度取决于镜体结构和支撑结构的刚度和稳定性,具体指标要求次镜组件面形精度PV≤λ/10,RMS≤λ/50,如表1所示。

图 1 光学系统
Figure 1. Optical system
表 1 次镜组件主要技术指标
Table 1. Main technical indicators of secondary mirror assembly
Name RMS Mass Axial displacement Radial displacement Secondary mirror ≤λ/50 ≤2 kg ≤±0.01 ≤±0.01 -
次镜选取具有良好力学性能和热力学性能的材料,故采用高比刚度(E/ρ)和高热稳定性(λ/α)的材料,同时次镜材料要具有较强的可加工制造能力,这样可以降低加工误差对面形的影响。常用的反射镜材料有Zerodur、Be、RB-SiC、碳纤维复合材料(M40J)等,性能参数如表2所示,可以看出E/ρ性能最好的是Be,但是Be的热膨胀系数偏高且材料具有毒性,对加工制造增加了巨大难度,提高了加工成本,所以应用较少。第三代反射镜材料RB-SiC的综合品质因数远远高于其他材料,可以提供良好的力热性能,并且中国科学院长春光学精密机械与物理研究所具有独立自主的SiC反射镜制造技术,处于国内领先状态。综合以上条件分析,次镜采用RB-SiC材料。
表 2 常见的次镜材料性能参数
Table 2. Performance parameters of common materials for secondary mirror
Materials ρ/kg·m−3 E/GPa λ/W·mK−1 α×10−6/K−1 E/ρ×10−6/m λ/α×10−6/m·W−1 (λ/α)·(E/ρ) Zerodur 2530 91 1.64 0.05 36 32.8 1180 Be 1850 287 216 11.4 155 18.9 2939 RB-SiC 3050 330 155 2.5 108 64.6 6977 M40J 1560 145 Designable Designable 93 Designable Designable -
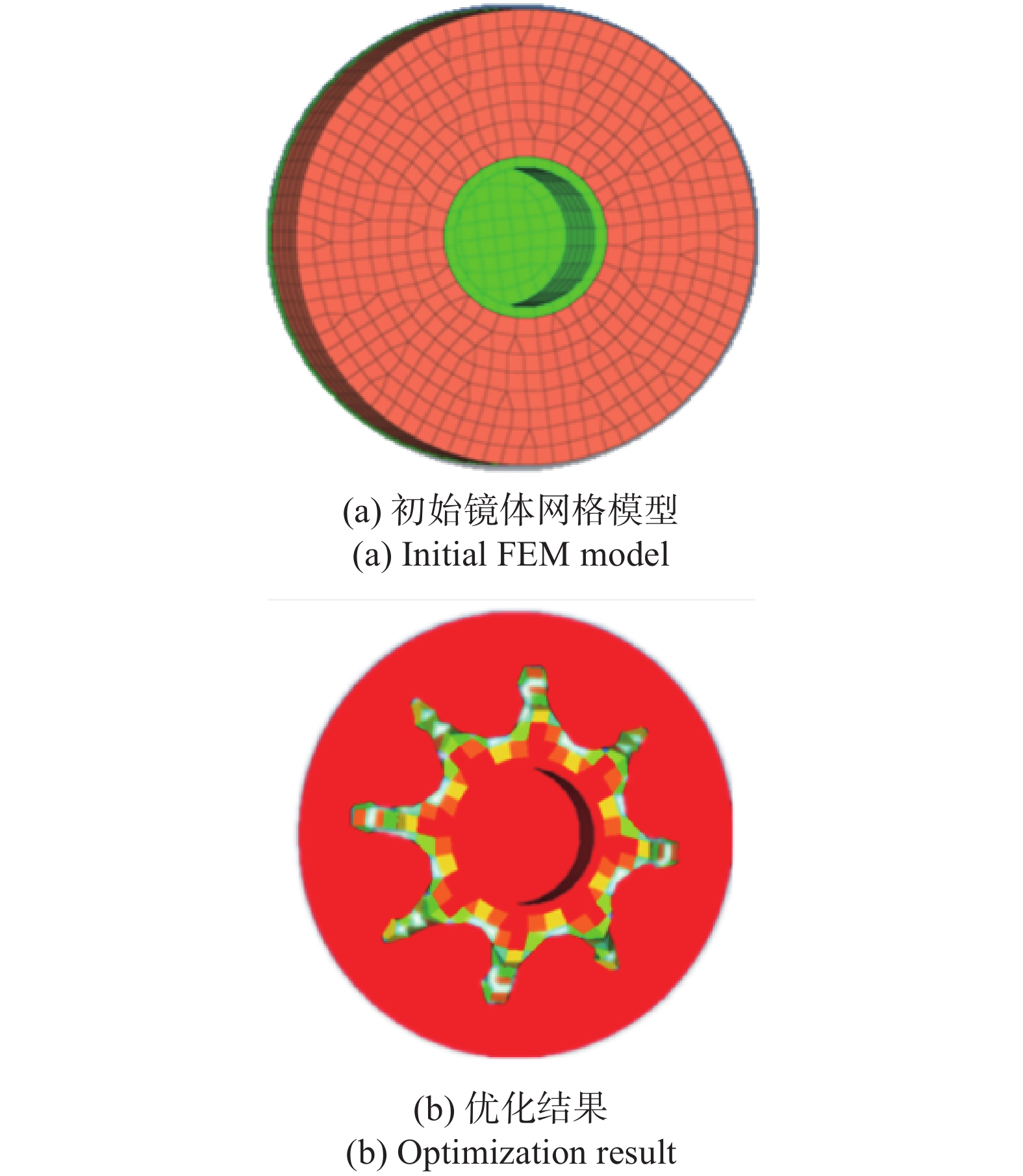
根据光学设计指标要求次镜通光口径为250 mm,考虑到镜面加工时的边缘效应口径单边增加5 mm,取次镜口径为260 mm,由经验公式选取镜厚比为6.2,镜体厚度为41 mm。小口径次镜对于质量要求较为严苛,根据包奇红等人的研究可知,口径小于750 mm的反射镜采用中心支撑可以满足要求,同时对中心支撑孔大小进行优化设计,得出轴向重力下面形随支撑大小成凹曲线变化[7]。由于次镜口径较小,故文中采用中心支撑的方式,取中心孔直径为80 mm,采用背部开放式结构来设计次镜。根据实体次镜优化寻找背部最佳传力路径。图2(a)所示为综上分析建立的次镜初始模型。

图 2 实体镜模型及优化结果
Figure 2. Solid mirror model and optimization result
SIMP材料插值数学模型:
$$E = {\rho ^p}{E_0}$$ 式中:E表示设计单元的材料特性,即弹性模量;ρ表示材料密度;E0表示材料弹性模量的初值;p为惩罚因子(实体单元故取3),主要使单元密度在0~1之间寻找最优分布。
实体拓扑优化数学模型:
$$ \begin{array}{l} {\rm{Find}}:x = {({x_1},{{\rm{x}}_2},......{x_n})^{\rm{T}}} \\ {\rm{Min}}C(x) = {F^{\rm{T}}}U = {U^{\rm{T}}}KU \\ {{S.t}}.\left\{ \begin{array}{l} V = \displaystyle\sum\limits_{i = 1}^n {{x_i}{v_i} \leqslant f{V_0} = {V^*}} \\ F = KU \\ \end{array} \right. \\ 0 < {x_{\min }} \leqslant {x_i} \leqslant 1\left( {i = 1,.......n} \right) \end{array} $$ (1) 式中:xi为表示材料的密度分布;C(x)为结构柔顺度;F为结构所受的载荷向量;K为结构总体刚度矩阵;U为结构总体位移向量;V0为初始体积;V为结构体积;f为体积分数;xmin为材料密度下限。
根据公式(1)可知实体次镜结构采用SIMP方法在约束体积分数(f=V/V0=0.2)下以柔度最小进行优化设计寻找轻量化筋的分布。经过了20次迭代后,实体镜拓扑优化结果如图2(b)所示。根据拓扑优化结果可知,轻量化筋的大致分布主要由由八条圆周对称的筋构成,越靠近支撑孔位置材料越重要,边缘的材料可以切除。
实体镜拓扑优化可以获得大致的传力路径,但是实体镜优化往往会产生一些材料的堆积、网格效应和难以制造的结构,所以次镜初始结构根据拓扑优化传力路径设计轻量化基结构。常见的反射镜背部轻量化孔形式为三角形、四边形、扇形、六边形等,四边形和扇形轻量化程度较好,扇形结构形式简单,易于加工制造,三角形比刚度最好,但是质量相对较大。根据拓扑优化结果和上述分析设计两种背部次镜轻量化结构(扇形、直角三角形),如图3所示。

图 3 两种基结构
Figure 3. Two ground structures
根据表3可知,两种基结构面形和变形较小,但是轻量化程度不足,所以采用基结构拓扑优化在保证各性能的同时降低次镜的质量。
表 3 两种初始结构参数对比分析
Table 3. Comparison of two initial structural parameters
Initial structure Mass/kg Maxdispa Maxdispr RMSy /nm Lightweight ratio Sector 1.66 1.28e−5 7.21e−6 0.658 69% Right triangle 1.84 1.18e−5 7.43e−6 0.658 66% -
基结构法是将连续的设计域近似表示成由桁架或梁单元组成的稠密网格。该方法通常是在具有清晰结构的基础之上进行优化设计,可以弥补实体优化带来的材料堆积和难以制造等问题。对于次镜而言,其轻量化筋通常是薄壁结构,因此模型采用基结构法[8],利用壳单元来进行优化设计,该方法不仅增加镜体可制造性,还具有提高运算速度、节约资源、使优化更加灵活等优点。随着反射镜口径越大提升越明显。
所设计的两种基结构如图3所示,这两种次镜轻量化结构轻量化率分别为69%、66%,但是轻量化程度难以满足指标要求,所以在该基结构的基础上进行优化设计,来降低质量,提升轻量化率。但是对于次镜镜体而言自身刚度十分重要,是保证面形的关键。故采用考虑多工况下(主要是轴向重力、径向重力、抛光应力)的壳单元基结构优化方法,在保证刚度下对次镜进行轻量化处理。
$$\begin{array}{l} \min {C_\omega }{\rm{ = }}\alpha {C_x} + \beta {C_y} + \gamma {C_p} \\ {{S.t.}}\left\{ \begin{array}{l} m \leqslant M \\ |\Delta u| \leqslant \delta \\ {D_k}\left( x \right) = 0 \\ \end{array} \right. \\ 0 < {\rho _{\min }}\leqslant{\rho _i} \leqslant 1 \end{array} $$ (2) 根据公式(2)可知优化模型以在轴向、径向重力和抛光应力工况下基结构的柔度最小作为目标函数,即刚度最大(沿光轴方向载荷对面形影响较大,所以α=0.2、β=0.4、γ=0.4);同时约束质量不超过上线M,保证次镜表面节点刚体位移的绝对值|△u|小于
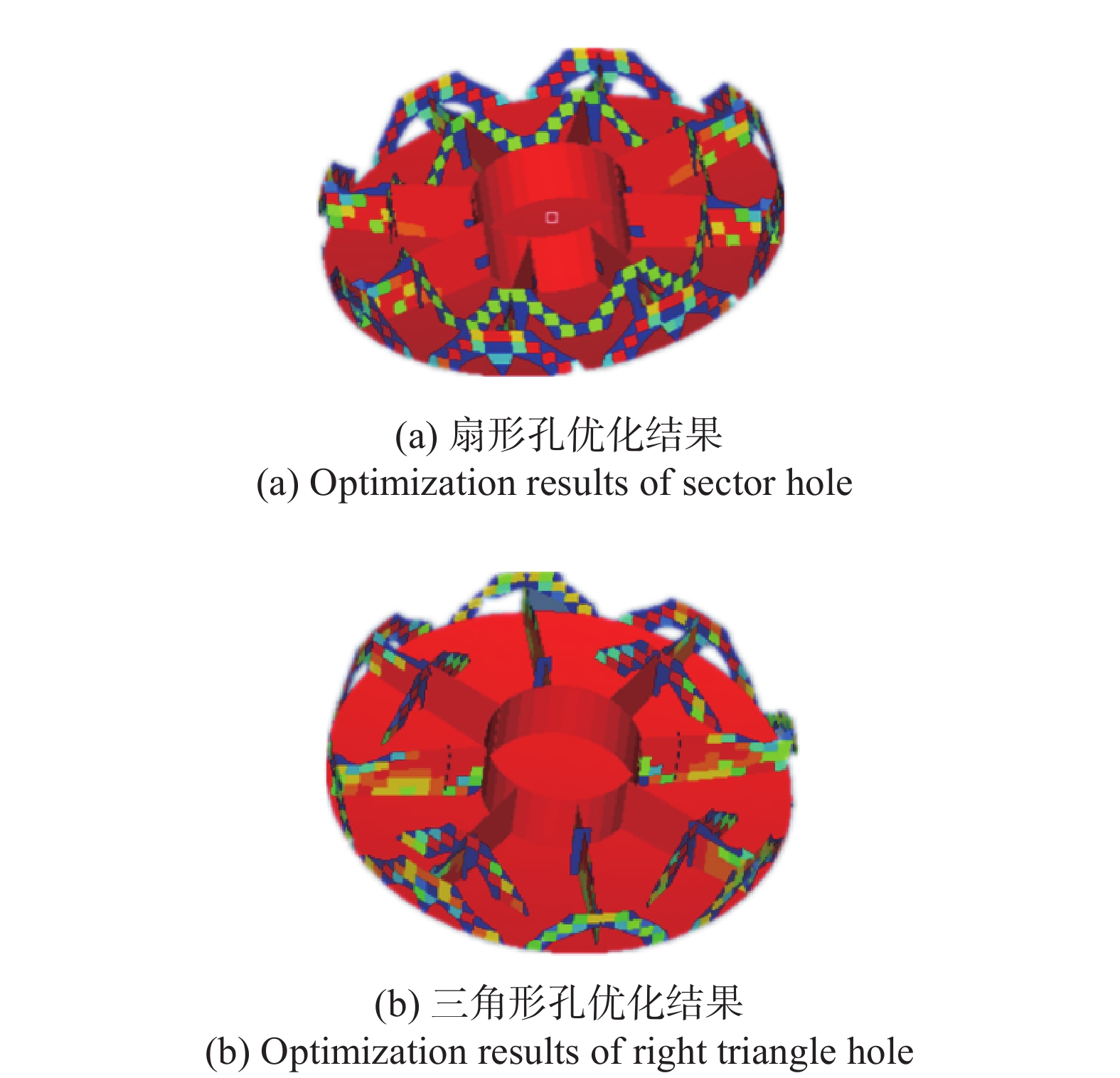
$ {\rm{\delta }}({\rm{\delta }} $ =1 nm),Dk(x)为圆周对称约束,可提升镜体的可制造性。如图4所示,根据拓扑结果可以发现直角三角形轻量化孔次镜可制造性较差,根据拓扑优化结果设计次镜轻量化结构不能满足三角形轻量化孔的设计理念,同时对于口径较小的次镜而言,背部轻量化结构及支撑结构尽量简单化。对比两种基结构的拓扑优化可知,直角三角形轻量化孔形式材料分布分散,增加制造难度,同时初始基结构的面形相同,但是质量偏高,所以采用扇形基结构拓扑模型。采用拉伸切除和旋转切除两种方式对次镜进行轻量化处理,其质量为1.35 kg,轻量化率可以达到75%。优化后次镜结构如图5所示。
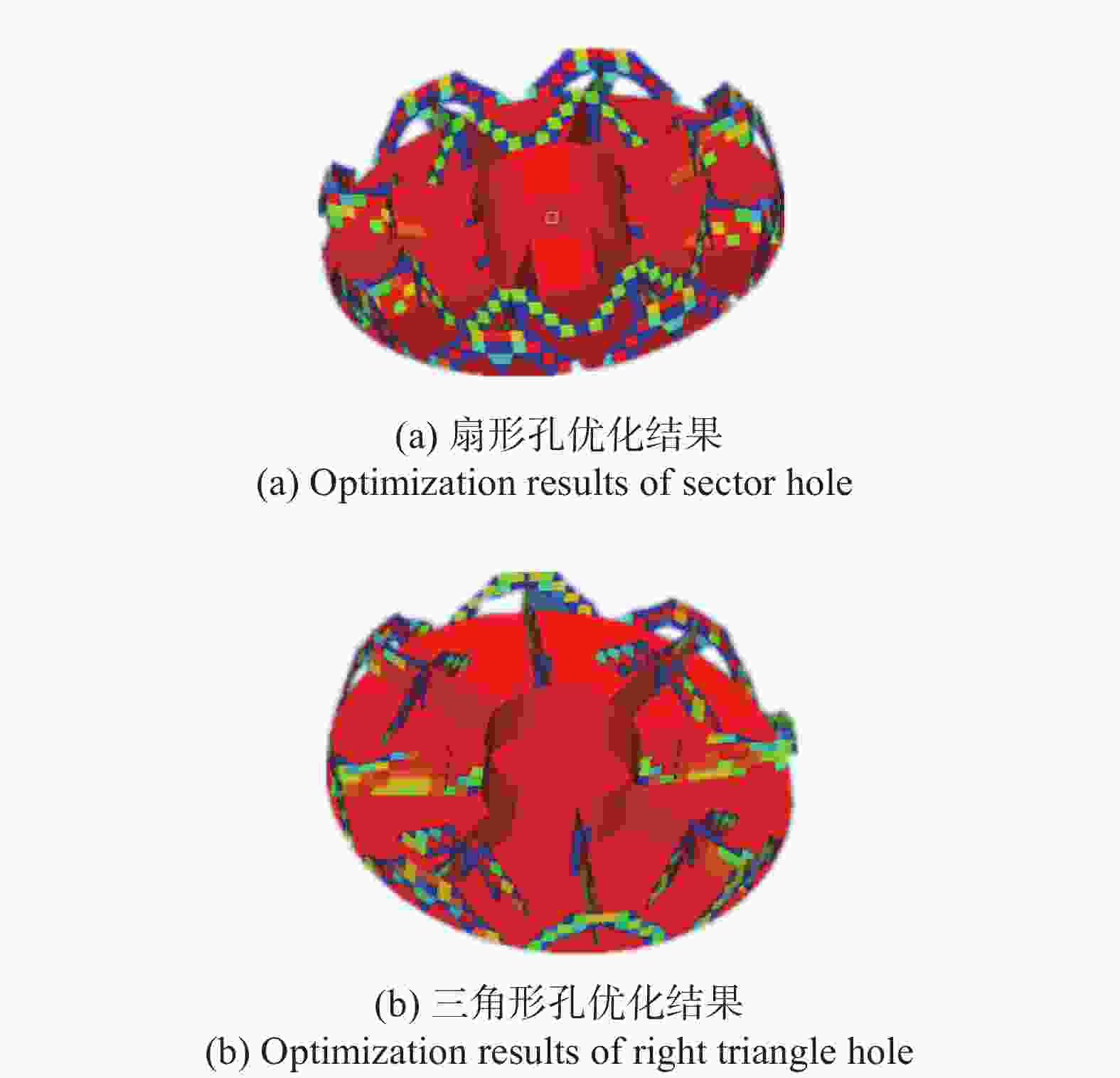
图 4 基结构拓扑优化结果
Figure 4. Topology optimization results of ground structure

图 5 优化后次镜结构图
Figure 5. Structure of optimized secondary mirror
-
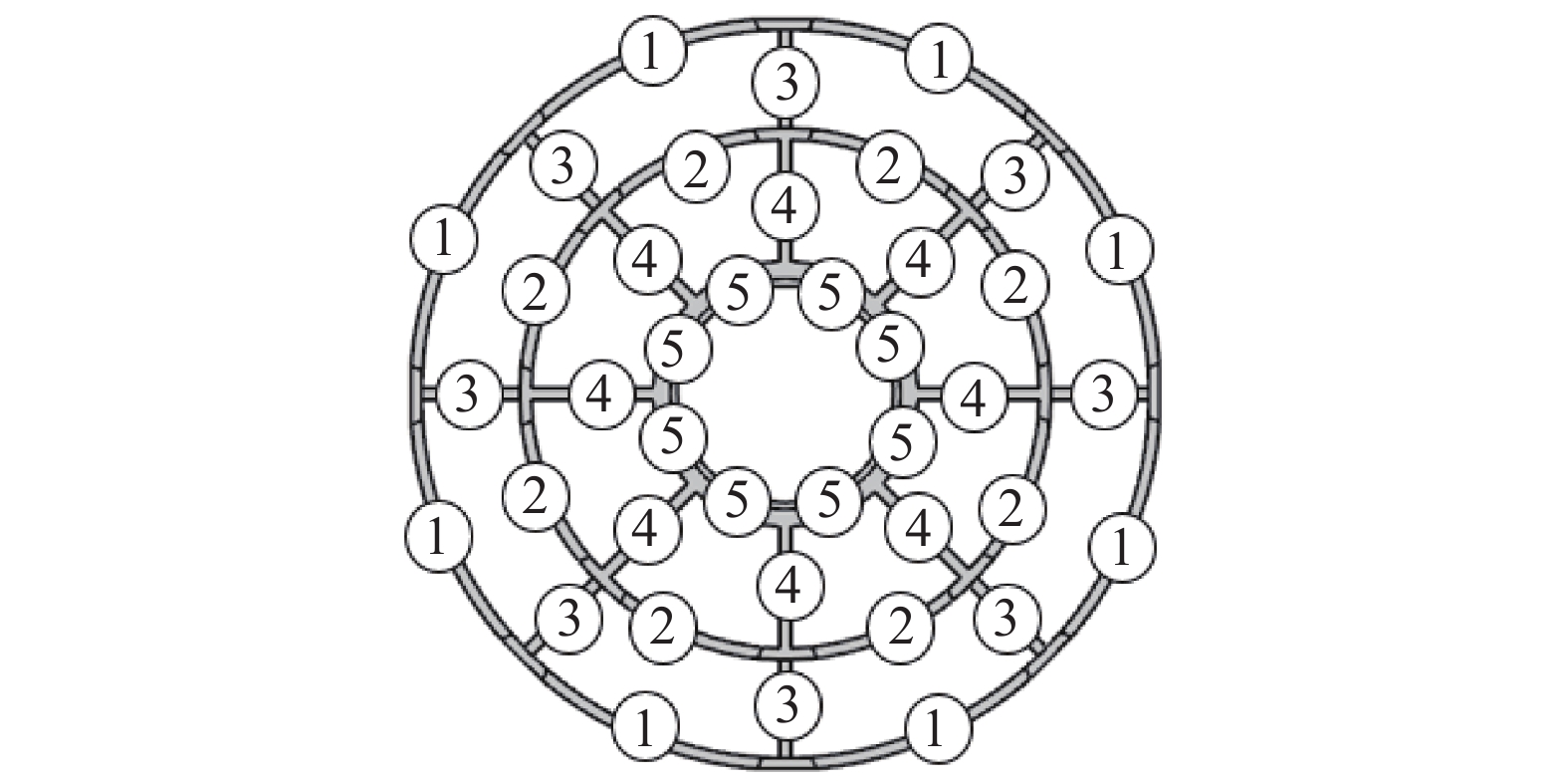
采用集成优化方法对镜体进行尺寸优化。根据拓扑优化结果(图4(a))对次镜轻量化筋进行分组,分组形式如图6所示。

图 6 轻量化筋分组示意图
Figure 6. Schematic of distribution of lightweight ribs
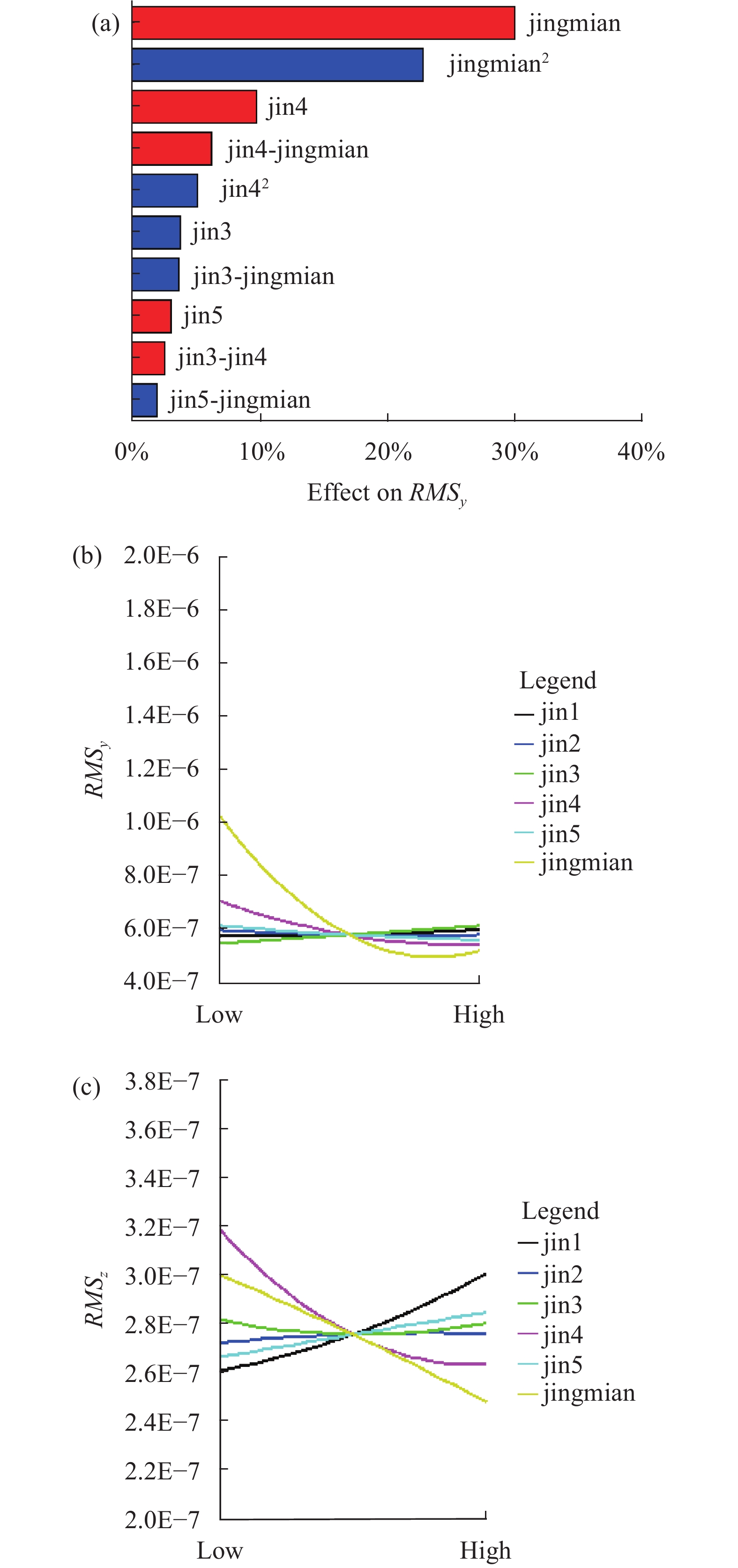
采用集成优化设计方法进行试验设计(DOE)和优化,DOE采用最优拉丁超立方设计(Optimal Latin hypercube design),其使所有的试验点尽量均匀分布在设计空间,具有非常好的空间填充性和均衡性。设置样本点数为75,DOE设计可以有效地辨识关键参数,分析输入输出之间的关系和趋势。如图7所示,可以看出镜面厚对RMSy影响最大,其余影响较小;jingmian、jin4和jin1对RMSx影响较大。但是各筋之间存在相互耦合,筋厚与面形之间关系较为复杂,应采用优化来寻找优化解。

图 7 Paroto图和主效应图
Figure 7. Paroto plots and main effect plots
该优化问题优化变量为镜面厚(jingmian)和各轻量化筋(jin1、jin2、jin3、jin4、jin5),优化过程以Y向重力镜面面形为目标,镜体质量作为约束条件,其数学描述为:
$$\begin{array}{l} \min{RMS\!\!_y}{\rm{ = }}\varphi {\rm{(jin1,jin2,jin3,jin4,jin5,jingmian)}} \\ \left\{ \begin{array}{l} {{S}}{{.t}}.{{ \; m}} \leqslant {{M}} \\ 3 \leqslant {\rm{jin}}1 \leqslant 6 \\ 3 \leqslant {\rm{jin}}2 \leqslant 6 \\ 3 \leqslant {\rm{jin}}3 \leqslant 6 \\ 3 \leqslant {\rm{jin}}4 \leqslant 6 \\ 4 \leqslant {\rm{jin}}5 \leqslant 8 \\ 3 \leqslant {\rm{jingmian}} \leqslant 6 \\ \end{array} \right. \end{array} $$ (3) 式中:RMSy为Y向重力下的面形值,nm;其余各优化变量单位为mm。采用pointer算法对次镜进行优化,pointer算法是四种算法的组合方法,具有很强的适应性,适合此类复杂的优化问题。优化结果如表4所示,各轻量化筋之间各不相同,中心支撑孔厚度最大,边缘轻量化筋厚度最小。优化后RMSy由0.65 nm变为0.51 nm,减小了21%,质量增加0.13 kg,满足设计要求。
表 4 设计变量和优化结果
Table 4. Design variable and optimization results
Varible Domain Initial value Optimum value jin1 [3,6] 4 3 Jin2 [3,6] 4 4.6 jin3 [3,6] 4 4.3 jin4 [3,6] 4 5.6 jin5 [4,8] 6 6 jingmian [3,6] 4 4.7 RMSy /nm — 0.65 0.51 M/kg — 1.39 1.52 -
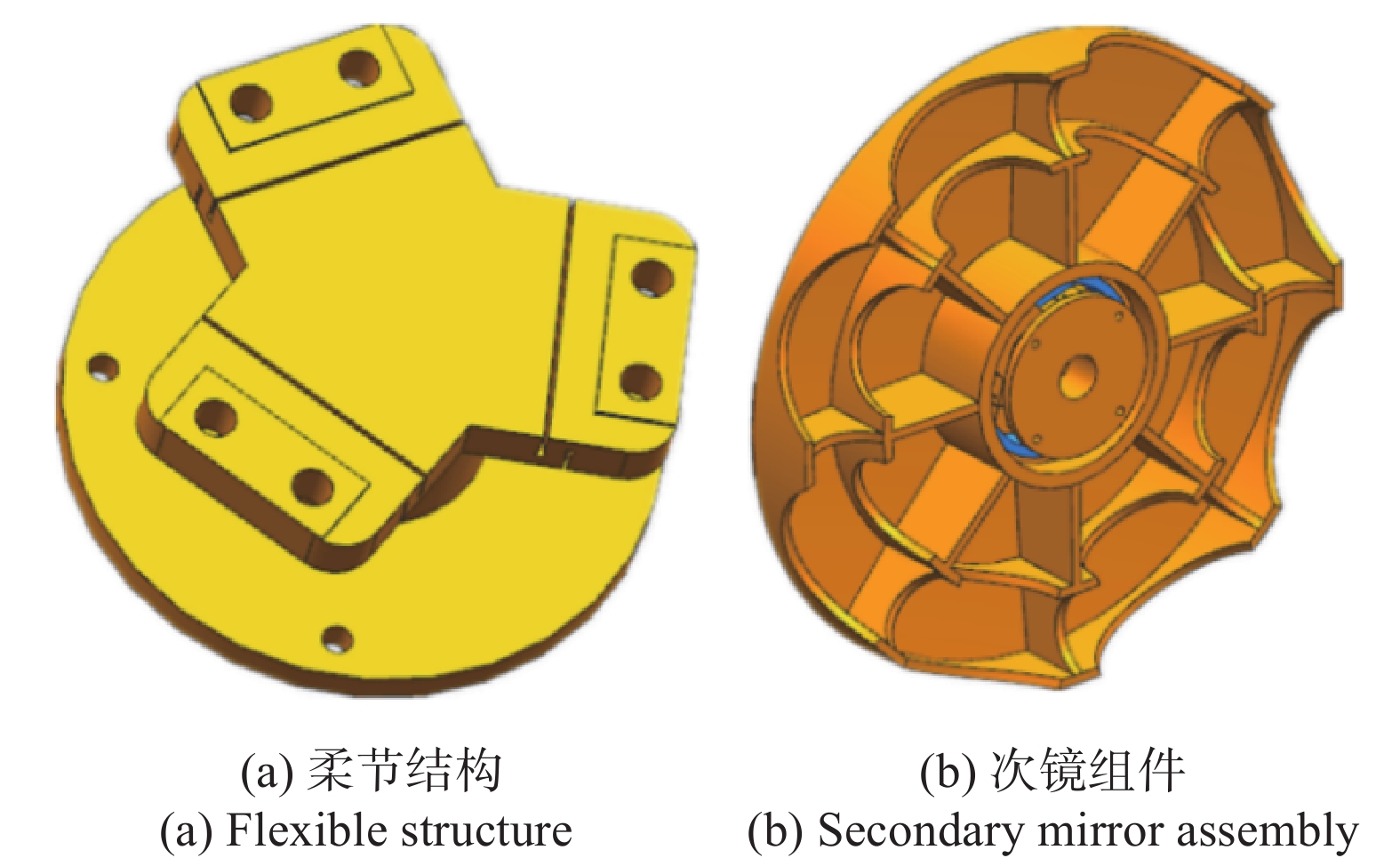
对于次镜而言,中心支撑结构具有应用成熟、结构形式简单和质量轻等优点,还可以减少热变形多点支撑带来的干涉影响[9],可有效避免多个安装面带来的装配误差,故采用中心支撑形式。柔性支撑结构如图8(a)所示,柔节采用三叶柔性结构,三叶柔性结构呈120°分布,每叶上沿轴向设计有较长柔性槽,柔性槽可以为次镜释放转动自由度和径向平动自由度。利用柔性槽的弹性形变来削弱锥套与柔节间由于线涨不一致带来的热变形,从而保证面形精度。次镜组件由镜体、锥套、柔节构成,锥套胶接于镜体背部盲孔,柔性结构与锥套和次镜安装面采用螺接,次镜组件采用四翼支撑与主支撑结构相连,实现次镜的固定。锥套采用殷钢材料(4J32)削弱温度变化带来的热应力,柔节采用性能稳定的钛合金材料(TC4)。材料性能参数见表5。

图 8 柔节结构及次镜组件
Figure 8. Flexible structure and secondary mirror assembly
表 5 支撑结构材料属性
Table 5. Material properties of supporting structure
Materials ρ/kg·m−3 E/GPa λ/W·mK−1 α×10−6/K−1 E/ρ×10−6/m λ/α×10−6/m·W−1 (λ/α)·(E/ρ) 4J32 8100 141 14.7 2.5 17.4 5.9 102.7 TC4 4400 109 7.4 8.9 24.7 0.8 19.8 -
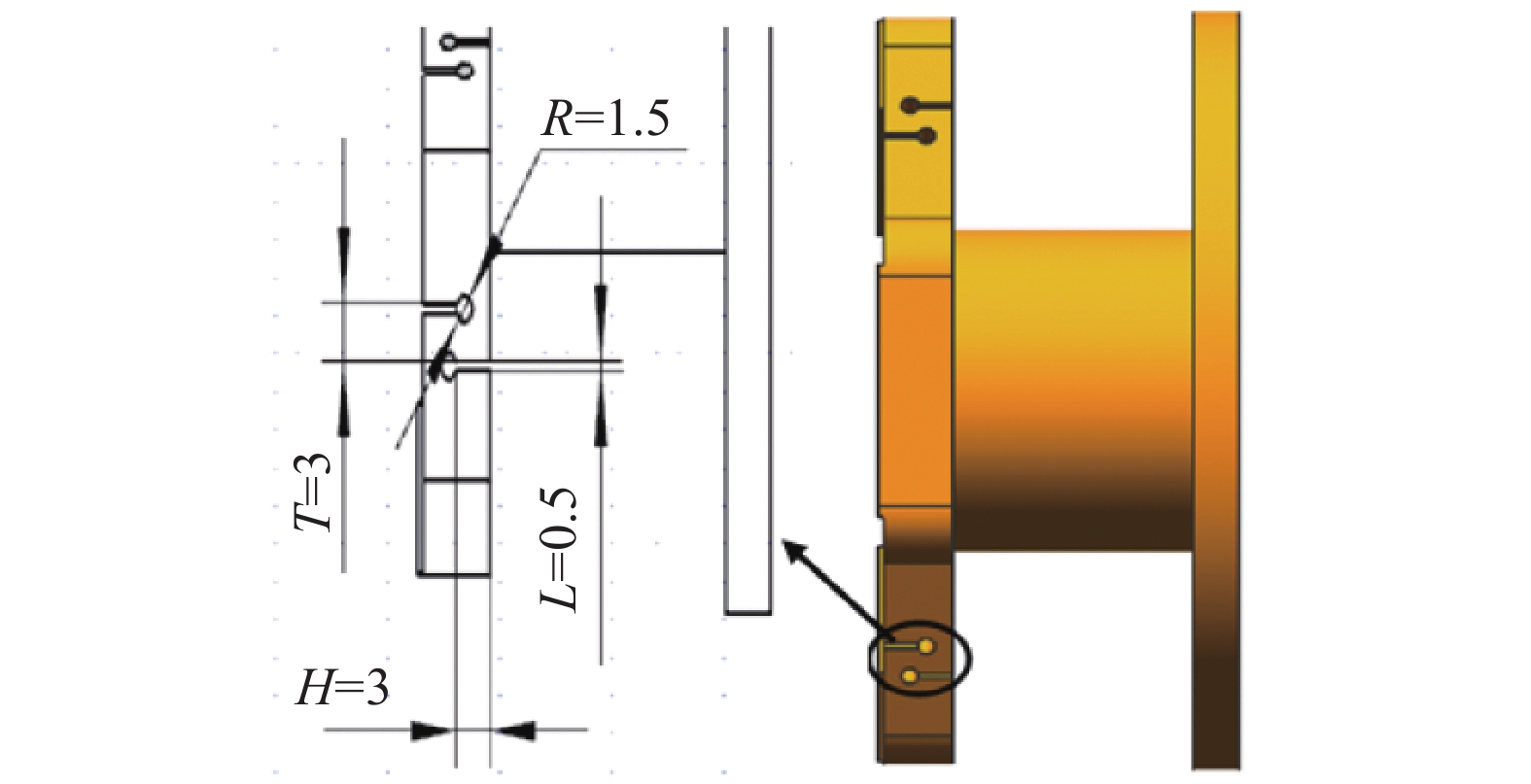
柔性结构是次镜组件中重要组成部分,其好坏直接影响次镜面形、力热稳定性,因此应综合考虑多种工况来设计柔性支撑结构。为了实现高面形、高刚度、低质量的设计目标,采用综合评价因子对次镜在四种工况下的RMS值、基频和质量进行综合评价。寻求综合评价因子W更为优异的柔性支撑结构。如图9所示,选取柔性支撑结构参数分别是柔槽圆直径R (1~2 mm)、柔槽高度H (2~3.5 mm)、柔槽宽度L (0.25~1 mm)和两个柔性槽之间的距离T (2~4 mm)对光轴水平RMS、光轴竖直RMS、(20±3) ℃RMS、0.02 mm装配误差下RMS、次镜组件基频f1、次镜质量M的影响,优化寻找较优的参数值指导设计柔性支撑。

图 9 柔节优化参数
Figure 9. Optimal parameters of flexible
反射镜的综合评价因子:
$${{W \!=\! }}\frac{1}{6} \times \left( {\frac{{RM{S_y}}}{{0.85}} \!+ \!\frac{{RM{S_x}}}{{1.54}} \!+\! \frac{{RM{S_t}}}{{1.06}}{\rm{ \!+ \!}}\frac{{RM{S_{0.02}}}}{{0.85}} \!+\! \frac{{203.8}}{{{f_1}}}{\rm{\! +\! }}\frac{M}{{1.9}}} \right)$$ (4) 以R=1.5、H=3、L=0.5、T=3为基准。
根据图10可知,各参数与综合评价因子(W)成抛物线关系,次镜以面形小、质量小、基频大为最终目标。综合考虑柔性支撑结构尺寸参数为R=1.5、H=3、L=0.5、T=3。

图 10 不同结构参数对W的影响
Figure 10. Influence of different structural parameters on W
-
通过hypermesh建立次镜有限元模型,静力学分析主要通过有限元对次镜在光轴0°和90°工作状态下、±3 ℃温度变化下刚体位移、面形精度以及0.02 mm装配误差下的面形精度进行仿真验证。如表6所示,次镜组件在x、y方向1 g重力、±3 ℃温度变化三种工况下的位移为2.8、0.4、1 μm,PV值为7.9、3.8、5.8 nm,面形RMS为1.5、0.85、1 nm。通过施加0.02 mm强制位移来模拟装配误差下的面形,其面形RMS为0.85 nm。临近空间望远镜次镜组件满足指标要求。图11为次镜组件在四种工况下的面形图。
表 6 静力学分析结果
Table 6. Static analysis results
Load PV/nm RMS/nm △u/mm 1g-x 7.9 1.5 0.0028 1g-y 3.8 0.85 0.0004 t=(20±3) ℃ 5.8 1.0 0.001 Metric λ/10=63.2 λ/50=12.6 0.01 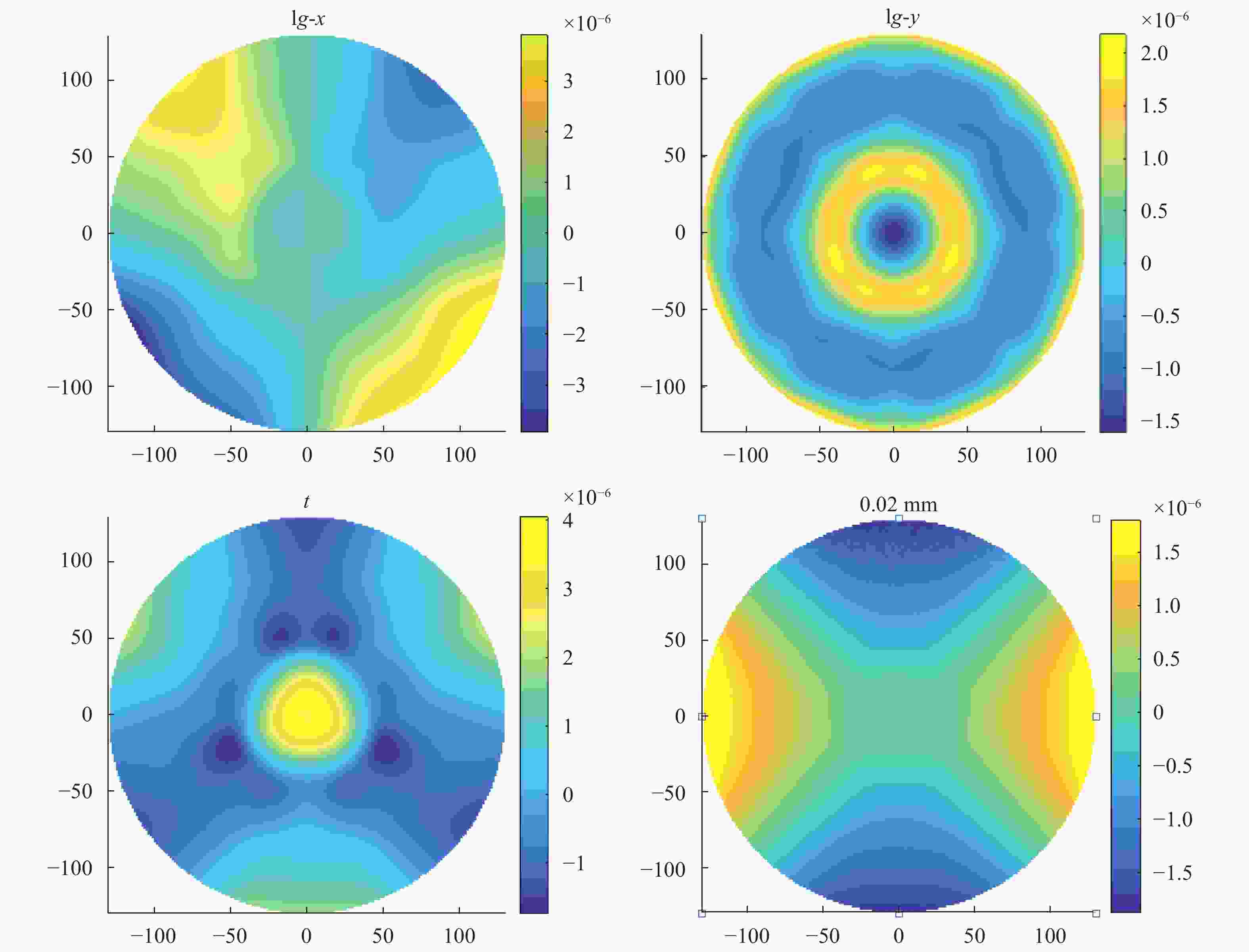
图 11 次镜组件面形图
Figure 11. Surface nephogram of secondary mirror assembly
-
临近空间望远镜在整个升空和降落过程中承受着一定的加速度和冲击等动力学载荷,为了避免对次镜组件造成塑性变形或破坏,要求次镜组件具有良好的可靠性。次镜组件采用反射镜、锥套、柔节的形式,虽然柔性支撑结构设计考虑了反射镜组件的基频,但仍需对其进行在飞行方向受到10 g加速度激励下应力响应分析。
次镜组件约束底部在重力方向施加10 g加速度,考察柔性支撑结构能否满足强度要求,柔节采用钛合金材料(屈服极限800 MPa),从图12中可以看出,经过发射方向(x)10 g加速度分析可知加速度响应应力最大点发生在安装位置,柔节连接处和柔性槽次之。最大加速度响应应力为35.4 MPa,安全裕度值可达到22.5。

图 12 加速度应力响应
Figure 12. Acceleration stress response
-
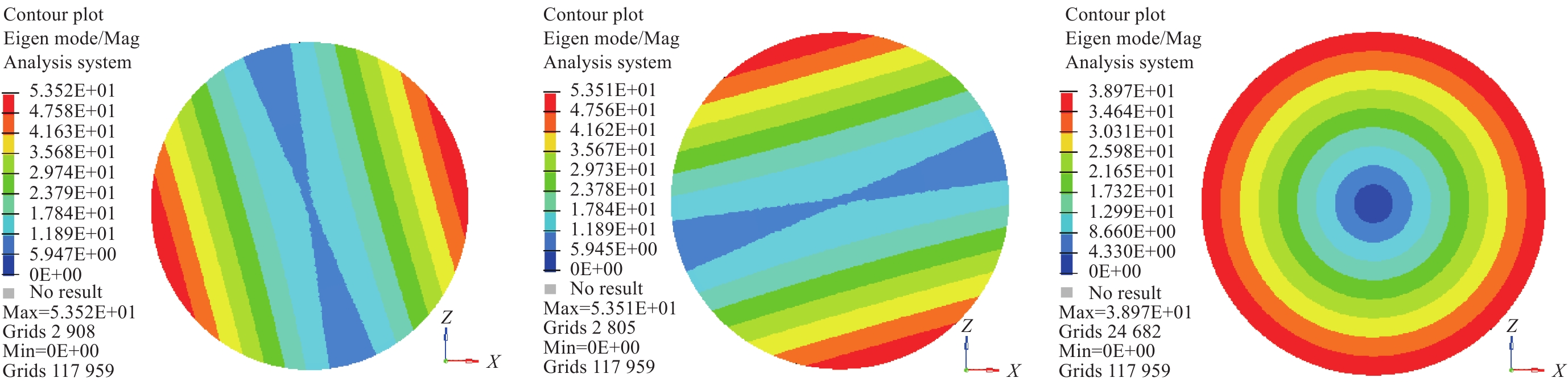
模态分析的主要目的是获取结构的动态特性,即系统的固有频率、阻尼、振型等[10],避免次镜组件受严苛的动力学环境影响,保证结构良好的动态响应特性。对次镜组件进行约束模态分析,约束次镜柔节安装位置。次镜组件前三阶模态见表7、前三阶模态阵型如图13所示。一阶频率为203.8 Hz,大于120 Hz,满足指标要求。
表 7 模态频率及阵型结果
Table 7. Modal frequency and mode shape results
Order Frequency/Hz Formation 1 203.8 Swing at an angle of 10 ° with the Z axis 2 203.9 Swing at an angle of 10 ° with the X axis 3 313.3 Y-direction swing 
图 13 前三阶阵型图
Figure 13. Mode shape of first three order
-
为了满足某临近空间球载望远镜次镜高面形精度、高稳定性的要求,对其次镜组件进行优化设计。采用实体优化和基结构优化相结合的方法,在满足寻找最佳传力路径的同时避免了次镜设计制造能力弱的问题。随后采用集成优化对镜体进行优化设计,在增加质量满足要求的条件下,RMSy提高了21%。为了寻找合适的支撑结构,将面形、质量、基频引入综合因子进行优化设计,获得了性能良好的次镜组件。次镜采用简单的中心支撑结构,其质量为1.9 kg,镜体轻量化率达到72%。在X、Y重力工况下,次镜组件位移为2.8、0.4 μm,具有足够的静态刚度,说明次镜优化方法有效。在X、Y方向1 g重力载荷作用下面形精度分别为1.5、0.85 nm;3 ℃均匀升温工况下面形精度为1 nm;0.02 mm装配误差工况下面形精度为0.85 nm,均满足指标(λ/50)要求。球载望远镜次镜组件在上升过程中10 g过载条件下最大应力响应为35.4 MPa,远小于其材料屈服极限,满足过载工况下的强度要求。次镜组件的一阶频率为203.8 Hz,具有较高力学稳定性。综上所述,次镜组件整体性能满足工程要求。
Optimization design of secondary mirror for near space telescope
-
摘要: 根据临近空间球载望远镜高力热稳定性、高性能的要求,对其次镜组件进行优化设计。临近空间球载望远镜虽然没有火箭发射力学环境严苛,但是其独特的飞行过程受到温度变化、加速度等影响,同时由气球搭载升空,质量要求较为严格。相比于传统反射镜设计方法,采用实体优化和基结构优化相结合的方法,集成优化对镜体进行设计,引入综合评价因子优化次镜综合性能,最终次镜组件性能良好,说明优化方法有效。通过有限元仿真分析得次镜组件在重力和±3 ℃均匀温变工况下刚体位移小于3 μm,面形精度优于λ/50,在0.02 mm装配误差下面形精度优于1 nm。次镜组件一阶频率为203.8 Hz,10 g加速度应力响应(35.4 MPa)远小于材料屈服应力。采用该方法优化可获得高力热稳定性、高性能的次镜组件。Abstract: According to the requirements of high force-thermal stability and high performance of the near space ball-borne telescope, the design of the secondary mirror assembly was optimized. Although the near-space ball-borne telescope was not as harsh as the rocket launching mechanical environment, its unique flight process was affected by temperature changes and acceleration. At the same time, it had a strict quality requirement due to carry with balloon. Compared with the traditional mirror design method, the method of combining entity optimization and base structure optimization, integrated optimization was used to design the mirror, and introduced comprehensive evaluation factors to optimize the overall performance of the secondary mirror. The performance of the final secondary mirror assembly is good, indicating that the optimization method is effective. Through finite element simulation analysis, it is obtained that the secondary mirror assembly has a rigid body displacement of less than 3 μm, a surface accuracy better than λ/50 under the condition of gravity and temperature change of ±3 ℃. Under 0.02 mm assembly error, the shape accuracy is better than 1 nm. The first-order frequency of the secondary mirror assembly is 203.8 Hz. The 10 g acceleration stress response (35.4 MPa) is far less than the material yield stress. Using this method to optimize can obtain high force-thermal stability, high performance secondary mirror assembly.
-
Key words:
- near space /
- telescope /
- secondary mirror /
- ground structure optimization /
- integrated optimization
-
表 1 次镜组件主要技术指标
Table 1. Main technical indicators of secondary mirror assembly
Name RMS Mass Axial displacement Radial displacement Secondary mirror ≤λ/50 ≤2 kg ≤±0.01 ≤±0.01  下载: 导出CSV
下载: 导出CSV
表 2 常见的次镜材料性能参数
Table 2. Performance parameters of common materials for secondary mirror
Materials ρ/kg·m−3 E/GPa λ/W·mK−1 α×10−6/K−1 E/ρ×10−6/m λ/α×10−6/m·W−1 (λ/α)·(E/ρ) Zerodur 2530 91 1.64 0.05 36 32.8 1180 Be 1850 287 216 11.4 155 18.9 2939 RB-SiC 3050 330 155 2.5 108 64.6 6977 M40J 1560 145 Designable Designable 93 Designable Designable
下载: 导出CSV
表 3 两种初始结构参数对比分析
Table 3. Comparison of two initial structural parameters
Initial structure Mass/kg Maxdispa Maxdispr RMSy /nm Lightweight ratio Sector 1.66 1.28e−5 7.21e−6 0.658 69% Right triangle 1.84 1.18e−5 7.43e−6 0.658 66%
下载: 导出CSV
表 4 设计变量和优化结果
Table 4. Design variable and optimization results
Varible Domain Initial value Optimum value jin1 [3,6] 4 3 Jin2 [3,6] 4 4.6 jin3 [3,6] 4 4.3 jin4 [3,6] 4 5.6 jin5 [4,8] 6 6 jingmian [3,6] 4 4.7 RMSy /nm — 0.65 0.51 M/kg — 1.39 1.52
下载: 导出CSV
表 5 支撑结构材料属性
Table 5. Material properties of supporting structure
Materials ρ/kg·m−3 E/GPa λ/W·mK−1 α×10−6/K−1 E/ρ×10−6/m λ/α×10−6/m·W−1 (λ/α)·(E/ρ) 4J32 8100 141 14.7 2.5 17.4 5.9 102.7 TC4 4400 109 7.4 8.9 24.7 0.8 19.8
下载: 导出CSV
表 6 静力学分析结果
Table 6. Static analysis results
Load PV/nm RMS/nm △u/mm 1g-x 7.9 1.5 0.0028 1g-y 3.8 0.85 0.0004 t=(20±3) ℃ 5.8 1.0 0.001 Metric λ/10=63.2 λ/50=12.6 0.01
下载: 导出CSV
表 7 模态频率及阵型结果
Table 7. Modal frequency and mode shape results
Order Frequency/Hz Formation 1 203.8 Swing at an angle of 10 ° with the Z axis 2 203.9 Swing at an angle of 10 ° with the X axis 3 313.3 Y-direction swing
下载: 导出CSV
-
[1] 刘奉昌, 李威, 赵伟国, 等. 临近空间球载望远镜概述及发展趋势[J]. 激光与红外, 2019, 49(11): 1275-1281. doi: 10.3969/j.issn.1001-5078.2019.11.001 Liu Fengchang, Li Wei, Zhao Weiguo, et al. Overview and developing trends of balloon-borne telescopes in near-space [J]. Laser & Infrared, 2019, 49(11): 1275-1281. (in Chinese) doi: 10.3969/j.issn.1001-5078.2019.11.001 [2] Kremic T, Cheng A F, Hibbitts K, et al. Stratospheric balloons for planetary science and the Balloon Observation Platform for Planetary Science (BOPPS) mission summary [C]//Aerospace Conference, IEEE, 2015: 1-10. [3] Barthol P, Solanki S K, Schüssler M, et al. The sunrise mission [J]. Solar Physics, 2011, 268(1): 1-34. doi: 10.1007/s11207-010-9662-9 [4] Shoji Y, Taguchi M, Nakano T, et al. FUJIN-2: Balloon borne telescope for optical observation of planets [J]. Transactions of the Japan Society for Aeronautical and Space Sciences, Aerospace Technology Japan, 2016, 14(30): 95-102. [5] Erickson E F, Honaker M A, Brivkalns C A, et al. Backup secondary mirror and mechanism for SOFIA [C]//SPIE, 2004, 5489: 1012. [6] Meng Qingyu, He Fei, Zhao Weiguo, et al. The overview of the planetary atmospheric spectral telescope (past) in the scientific experimental system in near-space (sense) [C]//ISPRS Geospatial Week, 2019, 2019: XLII-2/W13. [7] 包奇红, 沙巍, 陈长征, 等. 空间SiC反射镜背部中心支撑特性[J]. 光子学报, 2017, 46(2): 0222003. Bao Qihong, Sha Wei, Chen Changzheng, et al. Characteristics of rear support in centre for space SiC mirror [J]. Acta Photonica Sinica, 2017, 46(2): 0222003. (in Chinese) [8] 刘书田, 胡瑞, 周平, 等. 基于筋板式基结构的大口径空间反射镜构型设计的拓扑优化方法[J]. 光学 精密工程, 2013, 21(7): 1803-1810. doi: 10.3788/OPE.20132107.1803 Liu Shutian, Hu Rui, Zhou Ping, et al. Topologic optimization for configuration design of web-skon-type ground structure based large-aperture space mirror [J]. Optics and Precision Engineering, 2013, 21(7): 1803-1810. (in Chinese) doi: 10.3788/OPE.20132107.1803 [9] 包奇红, 沙巍, 陈长征, 等. 中心支撑长条形反射镜轻型优化设计[J]. 红外与激光工程, 2017, 46(7): 0718003. Bao Qihong, Sha Wei, Chen Changzheng, et al. Lightweight and optimization design of rectangular reflective mirror supported in centre [J]. Infrared and Laser Engineering, 2017, 46(7): 0718003. (in Chinese) [10] 张永强, 刘朝晖, 李治国, 等. 空间二维转台照准架的结构优化设计[J]. 红外与激光工程, 2017, 46(S1): S113003. Zhang Yongqiang, Liu Zhaohui, Li Zhiguo, et al. Optimum structural design for collimation frame of space-based two-dimensional turntable [J]. Infrared and Laser Engineering, 2017, 46(S1): S113003. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 521
- HTML全文浏览量: 135
- PDF下载量: 65
- 被引次数: 0







