



-
光电导引头是利用光学系统将目标对激光和可见光光学反射、红外辐射的能量会聚到激光、CCD或红外等探测器上,经光电转换后生成模拟电信号,信息处理主要是对探测到的不同种类的电信号进行放大调理,滤波、采样转换成数字信号,然后进行目标检测、识别和稳定跟踪,实时求解目标的角度误差及视线角速度,用于导弹制导控制。在多模复合探测体制中,信息处理还需完成多模信息融合、数据关联,复合抗干扰等复杂应用信息处理,最终实现光电导引头的智能化和高精度。

图 1 典型光电导引头系统逻辑组成图
Figure 1. Logical composition diagram of a typical photoelectric seeker system
典型的光电导引头系统组成如图1所示,主要由光学头罩、光学系统、探测器、信号处理、数据处理、稳定平台伺服控制和电源功放等功能部件组成。对于红外导引头,光学系统主要根据选用的探测器针对红外短波、中波和长波等不同波段设计,根据系统目标任务选用制冷或非制冷红外探测器,可以形成多种红外导引头系统方案。对于可见光导引头,光学系统则为可见光波段探测成像设计,探测器选用CCD。对于激光半主动导引头,光学系统设计为激光探测通道,探测器则选用四象限光电探测器。上述三种探测方式还可以分别进行两两组合,从而形成多种双模复合导引头方案,也可以同时采用三种探测方式,形成三模复合导引头方案,通常多模复合导引头光学系统采用共孔径共通道设计,实现复合探测。
广义地讲,光电导引头强大的信息处理任务和需求主要包括信号处理、数据处理和稳定平台伺服控制。数据处理是核心,主要包括图像处理、激光信息处理、目标检测识别、目标跟踪和抗干扰等,对于多模复合导引头,通常还包括数据关联、信息融合等高级信息处理,无论哪种导引头信息处理也都需要与弹上计算机之间进行数据交换和通信,与遥测设备进行数据交换,这些都是导引头信息处理不可缺少的组成部份。信号处理主要包括红外探测器、激光探测器、角度传感器、陀螺等传感器的微弱小信号放大、滤波、数字化采样等。稳定平台伺服控制主要包括探测组件稳定平台控制算法实现。
-
红外成像组件信息处理主要包括图像数字化采集、非均匀性校正、数字降噪和图像增强等。非均匀性校正(NUC)是红外成像算法关键的一环[4],首先对传感器固有非均匀性、像素响应率非均匀性进行归一化校正,然后将所有像素输出值校正到统一的目标值,最终将传感器固有非均匀性控制在期望的范围内。受各种环境条件的制约,红外图像信噪比较低,通常需要在不损失探测器灵敏度的前提下,对时域噪声(横纹噪声)和空域噪声(椒盐噪声)采用数字降噪算法进行实时抑制,从而提升探测器NETD和MRTD性能指标。红外数字视频属于HDR,必须采用DRC对图像进行处理,采用数字细节增强(DDE)算法能有效显示受关注的信息,并提升灵敏度,使红外成像组件可以适应较宽的工作温度范围。
-
图像信息处理主要应用于电视、红外及相应的复合导引头中,主要需求就是接收模拟或数字视频信号,对图像进行实时增强、滤波等数字信号预处理,再通过图像分割、特征提取、运动检测、模板匹配、模式识别和信息融合等处理技术,实现自动目标捕获(ATA)、自动目标识别(ATR)和末制导段全程抗干扰稳定跟踪功能,通常要求在不超过20ms的时间周期内处理完1帧全视场图像数据,对于高速导弹而言的高帧频系统,甚至可能要求10ms的时间周期内处理完1帧全视场图像数据,而且每帧处理的图像数据量很大,对于高分辨成像制导系统,每帧图像数据量会成倍增加,通常采用DSP+FPGA+存储器的硬件系统,计算资源要求很高,除了提高处理器主频外,更有效的技术解决途径是构建多片单芯多核并行处理系统。
-
激光半主动制导导引头激光信息处理主要有两个方面的任务和需求:
(1)目标反射的激光光斑经导引头的光学系统接收在四象限(或双四象限)光电探测器上成像[5],形成四象限输出信号,经过低噪声放大器放大,当四路信号的和信号超出检测门限时,对四路信号进行高速采样,提取四象限放大信号的电压值,采用和差比幅设计进行目标角位置解算[6],再将目标信号角度误差转化为导引头光轴与目标之间的视线角速度信号,送至弹上计算机用于制导控制。目标信号相对于视场中心的角度偏差(
$ \Delta X,\Delta Y) $ 按公式(1)、(2)计算:$$ \Delta X=\dfrac{{(U}_{A}+{U}_{D})-{(U}_{B}+{U}_{C})}{{U}_{A}+{U}_{B}+{U}_{C}+{U}_{D}} $$ (1) $$ \Delta Y=\dfrac{{(U}_{A}+{U}_{B})-{(U}_{C}+{U}_{D})}{{U}_{A}+{U}_{B}+{U}_{C}+{U}_{D}} $$ (2) 式中:UA、UB、UC、UD是四象限光电探测器四个象限的输出电压[7]。
(2)激光编码/解码抗干扰是激光信息处理设计中一项关键功能,导引头在实时接收到激光编码脉冲序列时,根据认证甄别电路按照唯一隔离对的鉴伪准则对接收脉冲序列进行认证识别,只有符合装订编码要求的脉冲序列才能通过间隔对的认证甄别电路,一旦接收脉冲序列中某间隔对解密单元成功解密,实现了对接收脉冲序列的编码解密,即实现接收脉冲序列码型识别捕获,然后将进行锁定和跟踪后续将要检测的预定码信息,根据编码规则,按编码匹配速度最优化设计,可随机在后时间段,开启相应波门进行匹配,直到最后完成接收脉冲序列解码识别、捕获及跟踪过程。
-
稳定平台伺服控制器是光电导引头的重要组成部分,主要实时采集稳定伺服平台角度、角速度等信息,根据图像或激光信息处理得到的目标角度误差,综合计算出目标视线角、视线角速度等信息,设计相应控制算法,形成必要的控制信号,控制稳定伺服平台运动,实现对目标的跟踪,同时把有关信息传送给弹载计算机,实现导弹飞行控制。
-
光电导引头信息处理任务和需求主要特点:传感器及探测器信号采集速度高、精度高,弱小信号SNR低,易受噪声干扰,需要高精度高速A/D,数据存储量大、数字传输速度高、实时性要求高。需要大容量高速存储器、高速数据传输链路、大规模并行计算单元、高效率高质量电源等硬件资源支撑。
-
分布式模块化信息处理设计思路是依据光电导引头典型的目标探测组件、自动目标识别跟踪、稳定平台综合控制等电子部件功能组成,针对传感器信号采集、数字化处理、红外探测成像图像预处理、目标检测识别跟踪图像处理、数字信号处理、伺服平台稳定控制,综合信息处理等功能,分别采用基于DSP+FPGA的实时信息系统设计独立的功能模块或组件。
-
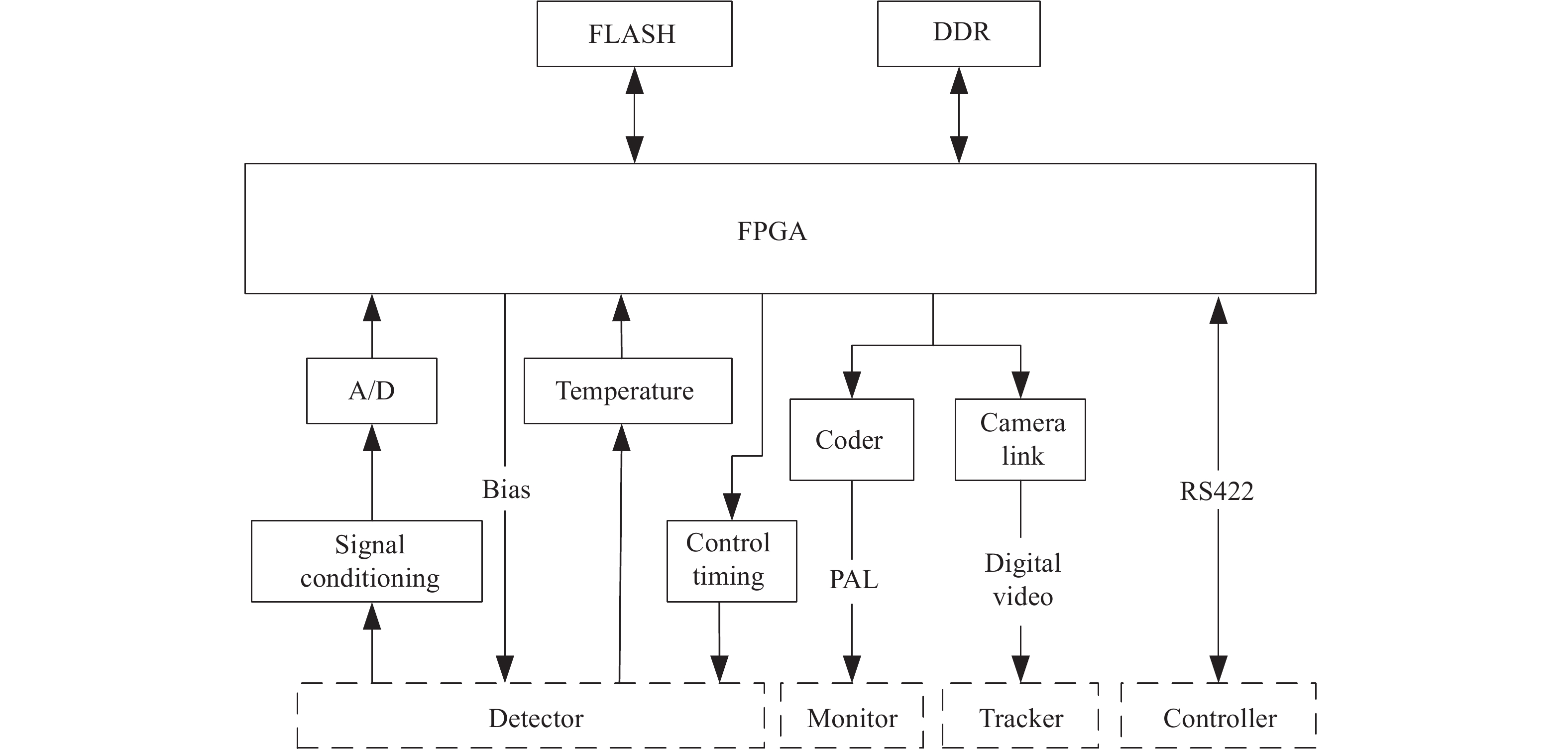
红外探测成像组件将探测器输出的双路模拟差分信号经模数转换器转换为数字信号,再传送至FPGA进行数据处理,同时通过线性稳压器为探测器提供模拟电源。主要实现红外信号数字化采集、图像处理及输出图像显示等,电路逻辑组成如图2所示。FPGA根据探测器内部温度信号、环境温度及设定信号,生成TEC控制信号送给探测器,同时FPGA生成探测器的工作时序,探测器输出的模拟信号经滤波放大、A/D转换数字化后送FPGA完成数据采集及处理;FPGA输出的数字图像采用规定协议接口传输给图像跟踪器处理;同时经视频编码器转换为PAL制式视频送显示器,DDR提供FPGA运行程序及临时数据的存储空间,FLASH用于存储程序和探测器K/B值,采用RS-422标准串行接口实现与其它单元之间的数据通信。
图 2 典型非制冷红外探测成像组件逻辑组成图
Figure 2. Logical composition diagram of typical uncooled infrared detection imaging components
-
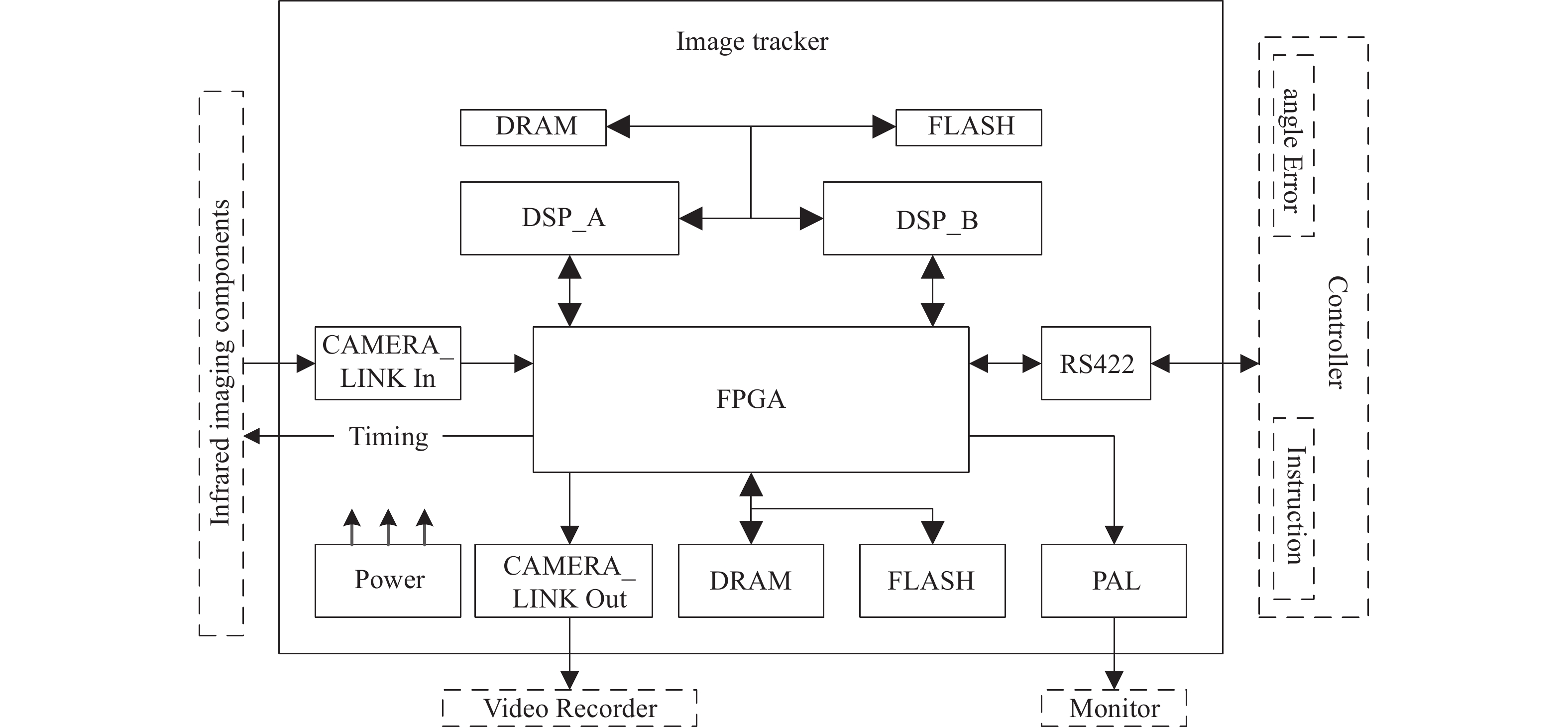
当今图像跟踪器有单GPU、单DSP、单FPGA和DSP+FPGA等几种主流方案[8],但是,嵌入式GPU的功耗较高、系统热设计难度大;单DSP不具备时序逻辑控制能力和接口扩展能力;单FPGA的高速浮点计算能力不足等重大缺陷,导致上述几种方案技术研究较多,工程应用较少。针对导引头图像跟踪器信息处理的任务和需求,工程上通常采用如图3所示的DSP+FPGA总体硬件架构设计,该方案DSP具备强大的数据处理能力和较高运行速度,主要作为图像处理的计算载荷单元对图像进行处理,实现复杂的目标检测、识别和跟踪算法。FPGA主要负责图像数据采集、传输与显示,时序逻辑控制,接口扩展等,同时利用FPGA大规模硬件流水线高速并行计算优势,进行滤波和特征提取等图像预处理,分担DSP的运算压力,提高系统运算实时性。为了满足计算吞吐量和计算载荷的处理能力需求,还在DSP和FPGA外配置了相应的数据存储器。在该架构中,数字图像输入和输出采用标准的CameraLink接口协议,模拟视频输出符合CCIR标准接口,通信控制采用RS422标准接口,系统具有较强通用性。DSP+FPGA硬件架构使得二者的优势互补,处理性能提升显著,而且系统可扩展能力和适应性较好,是当前图像跟踪器工程应用最成熟的方案。

图 3 典型图像跟踪器逻辑组成图
Figure 3. Logical composition diagram of a typical image tracker
-
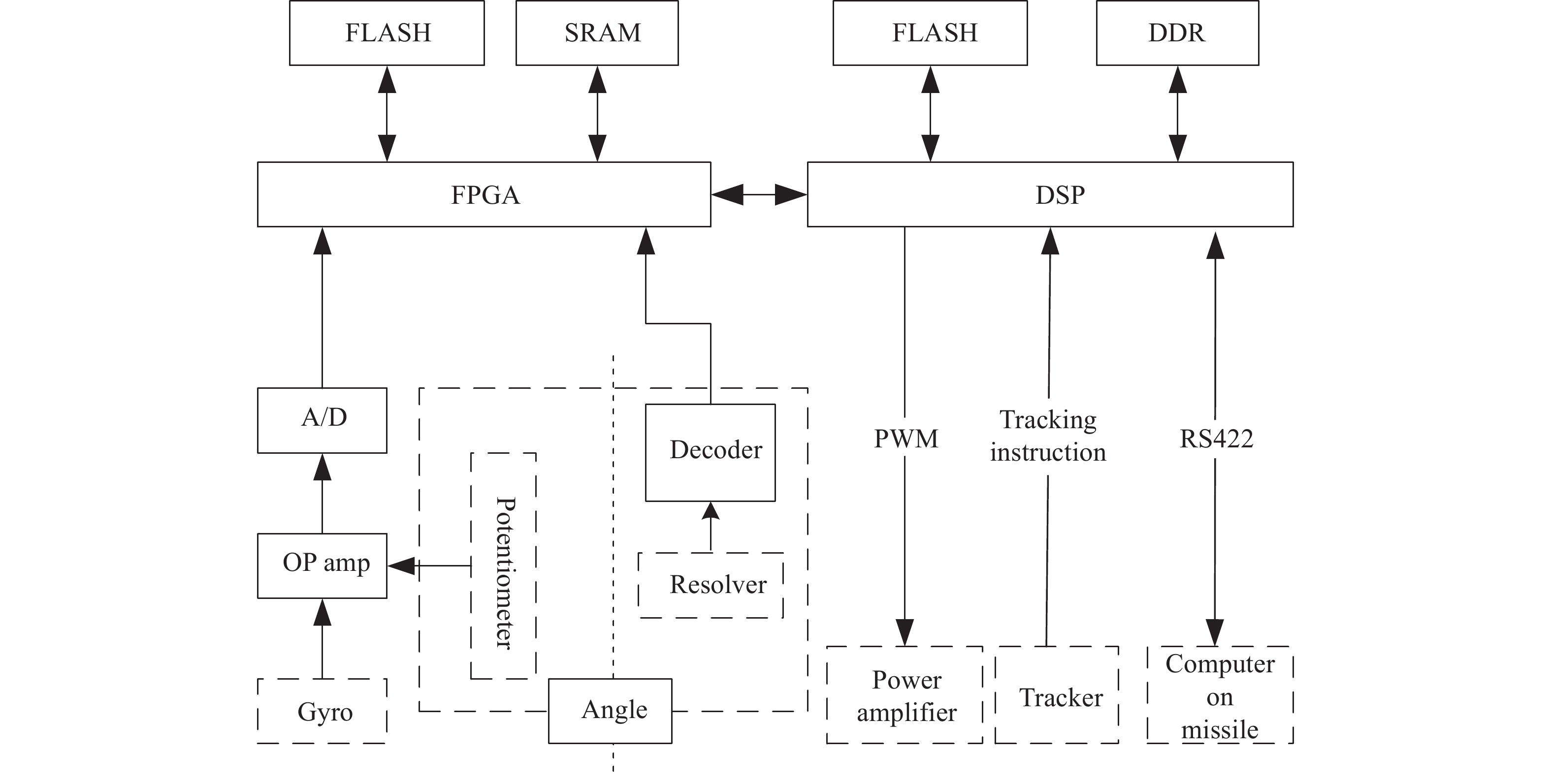
伺服控制通常采用双回路控制结构,内环为稳定回路,外环为跟踪回路。稳定回路是基于陀螺反馈的快速响应速度控制回路,能快速克服弹体扰动引起光轴晃动,保证光轴在惯性空间定轴性。外环由探测组件构成位置跟随回路,始终跟随目标的空间角运动。内外环控制回路能够保证在有弹体扰动情况下导引头光轴始终跟随目标在空间的运动。准确测量并输出目标视线角速度。如图4所示,伺服控制器通常采用DSP+FPGA的硬件方案,角度信号传感器可以根据精度要求,选用旋变或者电位计,角度和速度传感器的控制信号放大后经A/D芯片实现数字化采集,为了降低控制回路对噪声的敏感程度,应选择动态范围足够大的AD转换器[9]。在速率、位置和跟踪闭环PID控制运算及数据融合处理计算完成后,通过DSP的PWM信号生成模块产生控制信号控制功放驱动电机,实现平台的伺服控制。

图 4 典型伺服控制器逻辑组成图
Figure 4. Typical servo controller logic composition diagram
-
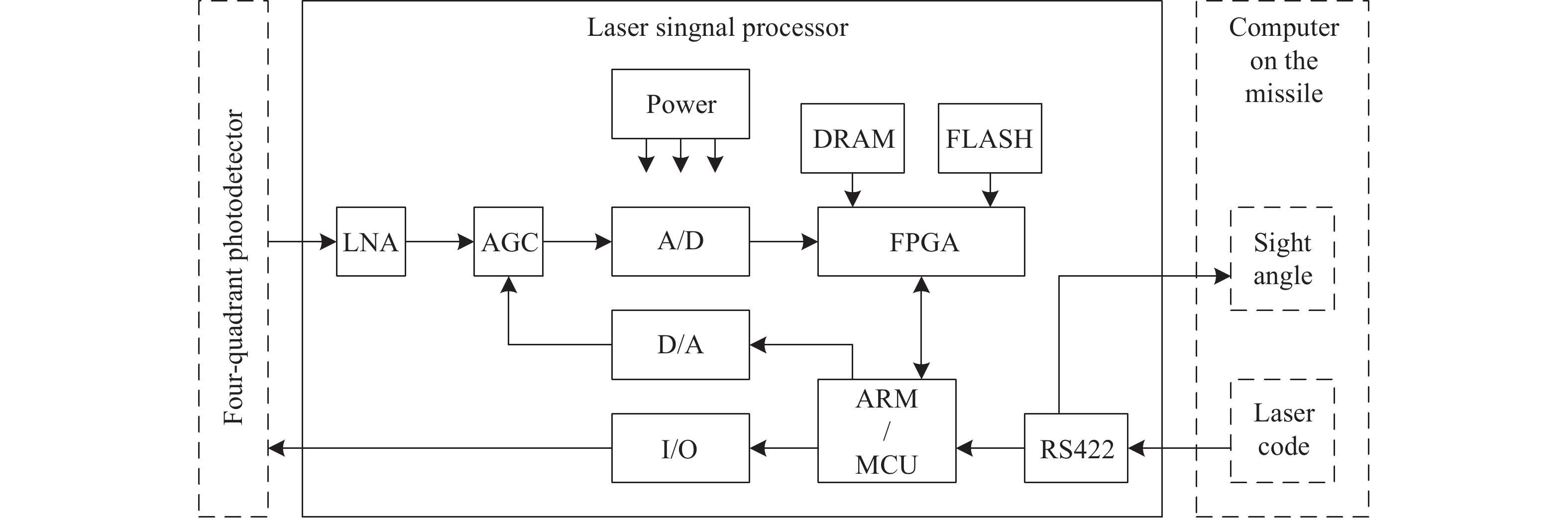
基于导引头激光信息处理需求,针对四象限光电探测器输出信号数字化采集,和差角度信息求解计算,目标捕获、自动跟踪、增益控制和激光编码/解码抗干扰等主要计算控制功能,通常采用FPGA+ARM(或单片机等处理器)的激光信息处理器设计方案,既能满足数字信号处理、数据计算和数据存储能力的需求,又可以提供可编程逻辑控制、丰富的I/O和通信等接口,如图5所示。

图 5 典型激光信息处理器逻辑组成图
Figure 5. Logic composition diagram of a typical laser information processor
-
光电导引头采用分布式模块化信息处理设计,具有设计难度较小,功能模块独立,软件开发集成度较小,故障定位简单,维修更换方便,直接与传感器集成有利于降低微弱信号噪声,有利于控制信号质量,提高目标探测灵敏度等优点。其缺点是导引头的电子部件(电路板)较多,信号处理硬件资源冗余较多,体积、尺寸、功耗很大,系统内部信号交联和接口复杂,电气布线难度大,信息/信号交换可靠性降低,成本很高。
-
未来光电导引头将向光学多模、微波/红外、毫米波/红外/激光等多模复合化发展,其电子系统涉及各种传感器信号、图像、激光、雷达等多波段、多体制实时信息处理融合一体的复杂局面,对于光学成像/主被动多模复合导引头,需要实现光学探测成像、微波探测、目标识别和稳定平台控制等多种功能,对于以光学成像为基础的多模复合导引头,通常需要对微波或者激光信号进行采集、处理和目标检测识别。微波中频信号处理、基带信号处理、图像处理等大多是采用DSP+FPGA的模式,具有极大的数字信号处理同构性[10],为了实现集成小型化,降低系统的复杂性,实现信息融合,光电导引头信息处理一体化设计是未来的必然发展趋势。
-
结合光电导引头目标探测组件、自动目标识别跟踪、稳定平台综合控制等电子功能部件组成,综合分析采用分布式模块化方法设计构建的典型光电导引头信息处理系统,存在大量DSP、FPGA、存储器、LDO电源等信号和信息处理硬件重复性设计,增加了大量部件之间不必要的通信和数据交换,造成了极大的硬件资源浪费,显著增加了电源消耗、体积空间占用和总重量,信息处理系统综合成本更是居高不下。
-
在大规模集成电路先进制造工艺支撑下,数字信号处理领域出现了内存容量大、数据传输带宽高、外设丰富、功耗低的高性能多核DSP芯片。FPGA实现了多达九百万级系统逻辑单元高密度和灵活丰富的I/O资源、内嵌增强型DSP内核具有超强的并行计算性能。新一代DSP和FPGA还与ARM处理器集成,推出了多核DSP+多核ARM、FPGA+ARM异构的SoC系统级单芯片,提供了无与伦比的系统性能、灵活性和可扩展性。高速DDR3/DDR4可以支持系统大容量存储器扩展需求。这些技术的革新与成熟应用强烈地推动着光电导引头信息处理集成小型化设计实现。
-
综合分析集成小型化需求和光电导引头电子部件技术特点,兼顾集成与分散的优点,遵循功能综合集成核心原则,结合技术的可实现性。根据红外探测器、激光接收机、导引头陀螺、旋变或电位计等传感器总体布局进行信号采集集成设计,分别完成传感器信号采集、调理、放大、滤波和数字化处理。信息处理集成系统是导引头集成小型化核心,主要是完成数字信号实时处理、红外探测成像非均匀性校正、激光信息处理、自动目标检测识别跟踪、伺服平台稳定控制、视线角信息数据解算、信息融合处理、复合抗干扰算法、系统各种工作参数管理、与弹载计算机的信息交互和系统任务管理等功能。构建了如图6所示的高性能集成小型化信息处理系统。
图 6 典型集成小型化信息处理机逻辑组成图
Figure 6. Logic composition diagram of typical integrated miniaturized information processor
-
针对图6所示的集成小型化信息处理机总体架构,可以通过主要器件的合理选型,实现如表1所示的性能指标[11]。
表 1 集成小型化信息处理机设计指标
Table 1. Feature summary of integrated miniaturized information processor
Performance Device reference Remarks Computing performance 8 TMS320C66x DSP Core Subsystems (C66x CorePacs)
4 ARM® Cortex® -A15 MPCoreTM Processors
DSP: 1.2 GHz×8=9.6 GHz
ARM: 1.4 GHz×4=5.6 GHz
Integer (Instructions) 19600 DMIPS
Fixed Point 307.2 GMACS
Floating Point 198.4 GFLOPS66AK2Hxx TI DSP
DSP+ARMMax 3528 DSP Slices
6.3 TeraMACs of DSP compute performanceXCKUxxP XILINX FPGA
UltraScale+Logic timing Up to 1.2M system logic cells
Up to 11 CMTsMemory 8 MB Local L2 Cache
6 MB Multicore Shared Memory (SRAM)On DSP chip 4 MB Local L2 Cache On ARM chip 2 GBytes DDR3
2 Gbits NOR FLASHMT41K512M16
MT25QU02GcBBExternal
extensionSignal acquisition 16 Bits, Up to 500 kSPS, 8 channels, ±20.48 V maximum ADAS3023 Interface expansion CameraLink, PAL, RS422, CAN Standard interface and PWM
GPIO control signalsDSP, ARM & FPGA Consumption Input:+5V, consumption about 30 W With heat dissipation Size Less than ø150 mm Weight Less than 500 g Contains structural parts -
该方案提炼抽象光电导引头数字信号处理需求,优化传感器信号采集模式,梳理信息处理功能和特点,均衡地分配到DSP和FPGA的数字信号处理计算单元和实时多任务处理单元,以DSP提供的丰富外设和FPGA高速数据传输接口为基础,以大容量高速宽带DDR3/DDR4和FLASH为保障,以多核DSP实时多任务快速响应调度为中心,充分利用高速多核DSP软件并行计算和大规模FPGA超长流水线硬件并行计算优势,综合集成传统光电导引头冗余信号和信息处理功能,优化部件间数据传输,减少了各部件重复DSP、FPGA、CPU和存储器等硬件资源,提高了资源利用率。具有系统体积小、重量轻、通信接口简单、综合成本和功耗更低等显著优势,但也存在设计难度大、软件开发集成要求高、测试性较差、故障定位困难、维修更换成本较高等缺点。光电导引头的工程研制需结合具体应用选择信息处理总体方案。
-
在综合分析光电导引头信息处理需求的基础上,分析了典型分布式模块化信息处理设计方案,总结了其优缺点,为了适应光电导引头多模复合发展趋势,更好地解决轻量化、小型化、集成化、低能耗和智能化等弹载环境制约问题的迫切需求,积极应用DSP和FPGA新技术发展成果,提出的集成小型化信息处理方案具有较强通用性,有利于应用推广,促进支撑导弹制导平台架构统型,导弹系列化及换代升级。是光电导引头信息处理系统工程应用设计的竞争优势所在和必然发展趋势。
Design of information processing system for photoelectric seeker
-
摘要: 光电导引头是智能化弹药的重要组成部分,信息处理是其精确制导的核心关键技术。从工程应用角度出发,系统地分析了光电导引头信息处理的主要任务及技术需求,梳理了经典的分布式模块化信息处理设计技术方案,总结了其显著优点和主要缺点。随着精确制导武器未来作战目标、环境和任务使命的需求变化,为了适应光电导引头多模复合、智能化、小型化、轻量化和低成本发展趋势,更好地满足弹载环境制约的迫切需求,充分运用超大规模集成电路和信息处理技术的革新成果,在光电导引头系统总体架构上,提出了集成小型化信息处理设计思路,并给出了典型的应用方案,设计了核心性能指标,在综合成本和功耗等方面优势显著,具有较强通用性,有利于导弹制导平台架构统型,导弹系列化及换代升级, 为新一代先进光电导引头工程研制提供参考。Abstract: The photoelectric seeker is an important part of intelligent ammunition, and information processing is the core key technology of its precision guidance. From the perspective of engineering application, the main tasks and technical requirements of the information processing of the photoelectric seeker were systematically analyzed, and the classic distributed modular information processing design technical schemes were sorted out, and its significant advantages and main disadvantages were summarized. With the changes in the requirements of precision guided weapons in future combat objectives, environments and missions, in order to adapt to the development trend of multi-mode composite, intelligent, miniaturized, lightweight and low-cost photoelectric seekers, better meet the constraints of the missile environment urgent needs, make full use of the innovative results of VLSI and information processing technology, in the overall architecture of the photoelectric seeker system, the design ideas of integrated and miniaturized information processing were put forward, and typical application schemes was got, and the core performance was designed. It has significant advantages in terms of comprehensive cost and power consumption, and has strong versatility, which is conducive to the integration of missile guidance platform architecture, missile serialization and upgrading, and provides a reference for the development of a new generation of advanced photoelectric seeker engineering.
-
图 1 典型光电导引头系统逻辑组成图
Figure 1. Logical composition diagram of a typical photoelectric seeker system
图 2 典型非制冷红外探测成像组件逻辑组成图
Figure 2. Logical composition diagram of typical uncooled infrared detection imaging components
图 5 典型激光信息处理器逻辑组成图
Figure 5. Logic composition diagram of a typical laser information processor
图 6 典型集成小型化信息处理机逻辑组成图
Figure 6. Logic composition diagram of typical integrated miniaturized information processor
表 1 集成小型化信息处理机设计指标
Table 1. Feature summary of integrated miniaturized information processor
Performance Device reference Remarks Computing performance 8 TMS320C66x DSP Core Subsystems (C66x CorePacs)
4 ARM® Cortex® -A15 MPCoreTM Processors
DSP: 1.2 GHz×8=9.6 GHz
ARM: 1.4 GHz×4=5.6 GHz
Integer (Instructions) 19600 DMIPS
Fixed Point 307.2 GMACS
Floating Point 198.4 GFLOPS66AK2Hxx TI DSP
DSP+ARMMax 3528 DSP Slices
6.3 TeraMACs of DSP compute performanceXCKUxxP XILINX FPGA
UltraScale+Logic timing Up to 1.2M system logic cells
Up to 11 CMTsMemory 8 MB Local L2 Cache
6 MB Multicore Shared Memory (SRAM)On DSP chip 4 MB Local L2 Cache On ARM chip 2 GBytes DDR3
2 Gbits NOR FLASHMT41K512M16
MT25QU02GcBBExternal
extensionSignal acquisition 16 Bits, Up to 500 kSPS, 8 channels, ±20.48 V maximum ADAS3023 Interface expansion CameraLink, PAL, RS422, CAN Standard interface and PWM
GPIO control signalsDSP, ARM & FPGA Consumption Input:+5V, consumption about 30 W With heat dissipation Size Less than ø150 mm Weight Less than 500 g Contains structural parts  下载: 导出CSV
下载: 导出CSV
-
[1] 张雷雷,王铎. 复合导引头制导技术研究[J]. 红外, 2019, 40(5): 18-22. Zhang Leilei, Wang Duo. Research on guidance technology for composite seeker [J]. Infrared, 2019, 40(5): 18-22. (in Chinese) [2] 左卫, 周波华, 李文柱. 多模及复合精确制导技术的研究进展与发展分析[J]. 空天防御, 2019, 2(3): 44-52. Zuo Wei, Zhou Bohua, Li Wenzhu. Analysis of development of multi-mode and compound precision guidance technology [J]. Air & Space defense, 2019, 2(3): 44-52. (in Chinese) [3] 陈浩川, 张彬, 张振华. 精确制导多体制探测技术新进展[J]. 遥测遥控, 2017, 38(6): 23-29. Chen Haochuan, Zhang Bin, Zhang Zhenhua. New development of multi-system and multi-band detection technology for precision guidance [J]. Journal of Telemetry, Tracking and Command, 2017, 38(6): 23-29. (in Chinese) [4] 陶俊伟, 王宏臣, 董珊, 等. 晶圆级封装非制冷大面阵红外探测器应用分析[J]. 红外, 2020, 41(1): 15-20. Tao Junwei, Wang Hongchen, Dong Shan, et al. Application analysis of wafer-level packaged and large-format uncooled infrared detector [J]. Infrared, 2020, 41(1): 15-20. (in Chinese) [5] Zhu Likun, Jia Fangxiu, Jiang Xiaodong, et al. Photoelectric detection technology of laser seeker signals [J]. Journal of Systems Engineering and Electronics, 2019, 30(6): 1064-1073. doi: 10.21629/JSEE.2019.06.02 [6] 彭晶晶, 刘 辉, 成志锋, 等. 一种激光半主动导引头高集成数字处理机的实现[J]. 空天防御, 2018, 1(3): 20-25. Peng Jingjing, Liu Hui, Cheng Zhifeng, et al. Realization of a high integrated signal processor for the semi-active laser seeker [J]. Air & Space Defense, 2018, 1(3): 20-25. (in Chinese) [7] 邱雄, 王仕成, 刘志国, 等. 激光导引头四象限探测器测角精度的建模研究[J]. 红外与激光工程, 2020, 49(7): 20190453. Qiu Xiong, Wang Shicheng, Liu Zhiguo, et al. Modeling research on angle measurement accuracy of four-quadrant detector of laser seeker [J]. Infrared and Laser Engineering, 2020, 49(7): 20190453. (in Chinese) [8] 郑骁. 红外导引头目标成像及检测一体化技术研究[D]. 北京: 中国运载火箭技术研究院, 2019. Zheng Xiao. Research on integration technology of target imaging and detection for infrared seeker[D]. Beijing: China Academy of Launch Vehicle Technology, 2019. (in Chinese) [9] 管占江. 基于DSP+FPGA的导引头伺服控制系统的电路设计与开发[D]. 西安: 西安电子科技大学, 2019. Guan Zhanjiang. Circuit design and development of seeker servo control system based on DSP+FPGA platform[D]. Xi’an: Xidian University, 2019. (in Chinese) [10] 高维, 郑鑫, 王凤姣. 一种面向复合导引头信号处理应用的SoC设计[J]. 制导与引信, 2014, 35(3): 21-26. Gao Wei, Zheng Xin, Wang Fengjiao. The design of SoC for the signal processing implementation of composite seeker [J]. Guidance & Fuse, 2014, 35(3): 21-26. (in Chinese) [11] 雷宏, 沈龙龙, 白江坡. 基于1K×1K的多通道综合图像信号处理系统设计[J]. 光电技术应用, 2020, 35(3): 26-30. Lei Hong, Shen Longlong, Bai Jiangpo. Design of multi-channel integrated image signal processing system based on 1K×1K [J]. Electro-optic Technology Application, 2020, 35(3): 26-30. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 647
- HTML全文浏览量: 176
- PDF下载量: 94
- 被引次数: 0




