



 下载:
下载:





-
近年来,移动设备数量与无线连接服务的指数级增长使射频资源日益紧张,海量数据对通信的高带宽和低时延提出了更高要求,给传统通信技术带来巨大的考验[1]。射频所占频段约为3 kHz~300 GHz,而电磁波谱中的可见光(375~780 nm)部分所占频段介于400~800 THz,大约是射频带宽的1万倍。可见光通信(Visible light communication,VLC)是以光波作为信息载体进行数据传输的无线光通信(Optical wireless communication, OWC)技术,具有绿色低碳、高带宽、抗截获、免频谱申请及通信与照明兼具等特点。在发光二极管出现后,世界照明的电力消耗从25%降到了4%。历史上,光通信早于射频通信。1880年“电话之父”Alexander Graham Bell实现了可传输213 m的光电话(Photophone),是最早的无线光通信系统。VLC与现有不同网络间的融合、优势互补,将极大的解决通信频谱紧张问题,更好的改善人类的通信服务体验[1]。可见光通信技术广泛应用于室内/户外通信与照明、芯片内光互联、空间卫星通信等场合,凭借光的抗电磁干扰特性,在核电站、矿井等电磁敏感场景也有广泛应用。
可见光通信技术正在向深空和海洋方向发展。海洋面积约占地球表面的71%,平均水深约3795 m,且蕴藏着丰富的矿物、生物资源。然而,还有95%的海底对人类来说还是未知的。随着人类对海洋的不断探索与海洋信息化的发展,水下无线通信起到越来越重要的作用。近十几年来,一种新兴的水下无线光通信(underwater wireless optical communication, UWOC)技术已引起世界科技、商业和军事界的广泛研究兴趣。水下无线光通信可理解为VLC技术应用在海洋/水下环境中,又称水下可见光通信(underwater visible light communication, UVLC)。传统的水声通信具有通信速率低、多径效应严重等不足。水下射频通信由于海水对射频波段的严重衰减,使传输距离一般不足10 m,虽然在30~300 Hz的超低频(super low frequency,SLF)波段可显著提升通信距离,但需较长的天线和复杂的系统设计。而UWOC采用光波作为信息载体,因此具有高速低时延、高带宽、低功耗和高安全性等特点,已成为水下无线通信的可选方式或重要补充[2-5]。但是,海水对光波的衰减(3.5~5 dB/m)比对声波的衰减(0.1~4 dB/km)严重的多,使得UWOC系统接收端光强信号微弱,并不适合于远距离传输,典型距离不超过100 m。另外,海水复杂的生化环境、海洋湍流等现象使得海洋/水下信道存在着较强的频率选择性衰落。因此,如何探测微弱的光强信号、抑制水下信道衰落是UWOC系统不可回避的基本问题。
多输入多输出(Multiple in multiple out, MIMO)是在通信系统收发之间构成多个并行且独立信道的天线系统。它利用多径效应来改善通信质量,提高了通信系统可靠性,有效抑制了信道衰落问题[6-8]。MIMO已是4G/5G移动通信的核心技术之一,MIMO技术可提供系统收发端分集增益和空间复用增益,并具有提高系统容量、增大传输可靠性、抑制信道衰落等作用[2-4]。近年来,MIMO技术已逐渐应用到水下无线光通信领域。表1为近年水下无线光通信MIMO(UWOC-MIMO)系统的相关工作。参考文献[9]提出了由5只光电二极管形成的阵列接收端,并分析了阵列中器件间距问题以及水下湍流对系统的影响等。参考文献[10]讨论了多输入单输出(multiple input single output, MISO)对水下弱湍流的抑制能力及性能改善。参考文献[11]讨论了以2×2的PIN阵列为接收端的水下系统。参考文献[12]设计了以APD为接收端的6×1 MISO系统。另外,参考文献[8]对UWOC-MIMO系统的信道特性、性能表征等做了较深入的分析。
表 1 水下无线光通信MIMO系统
Table 1. UWOC-MIMO system
文献中,很少有关光电倍增管(Photomultiplier tube, PMT)阵列的UWOC-MIMO系统的研究报道。PMT因内部具有电子倍增系统,是可检测极微弱光信号的真空光电探测器件。相比雪崩光电二极管(Avalanche photon diode, APD),其具有超高的灵敏度和低噪声等特点,甚至可作为单光子探测器[2]。虽然PMT具有体积大、脆弱、对电磁敏感及怕强光辐射等不足,但PMT与MIMO技术相互结合,可抑制水下信道衰落现象并实现水下微弱光链路远距离传输,这也是此文的研究意义所在。
文中设计了基于绿光发光二极管(light emitting diode, LED)阵列和PMT阵列的6×3 UWOC-MIMO系统,重点对系统总体设计及PMT与MIMO的基本原理与特点进行了介绍。
-
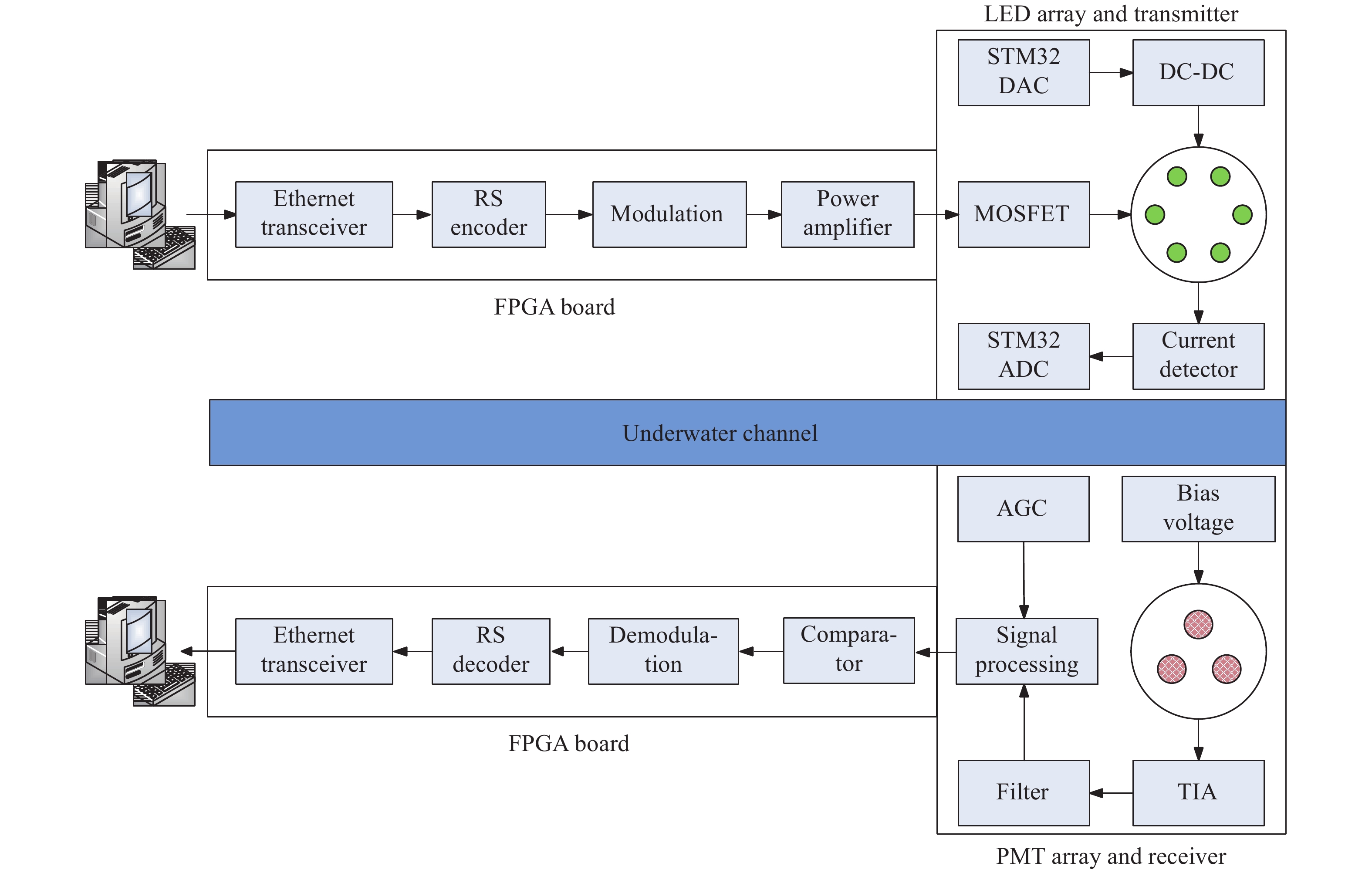
系统结构框图如图1所示,发送端采用绿光LED阵列,接收端采用PMT阵列,形成了6×3的UWOC-MIMO系统,并由室内长为10 m的水槽模拟水下信道环境。
图 1 水下无线光通信MIMO系统结构图
Figure 1. The structure of the proposed UWOC-MIMO system
-
以太网收发器芯片为网口数据包提供物理层功能。现场可编程门阵列(Field programmable gate array,FPGA)实现RS (Reed-solomon)信道编码、光强调制,并驱动LED阵列。通常,海洋水体对蓝绿光波段衰减相对较小,是天然的海洋光波传输低损耗窗。如图2(a)所示,光源由6只相同的绿光LED构成阵列,形成发射分集,目的是抑制水下信道湍流、增大发送光功率并降低收发两端对准要求[7-8]。如图2(b)所示,为绿光LED的电致发光(electroluminescent, EL)谱,中心波长在524 nm左右。另外,为LED设计全内反射透镜(total internal reflection, TIR),用于减小发射角度,达到适当减小水下信道几何衰减等目的。发射光束间要尽量减小相关性,使各个光束独立传输,这是MIMO技术的基本要求。由水下信道相干长度分析LED孔径间距d应满足[6]:
$$ d\geqslant \sqrt{\lambda L}\approx 0.23 \;\rm{cm}$$ (1) 式中:λ为波长(524 nm); L为链路距离(10 m)。
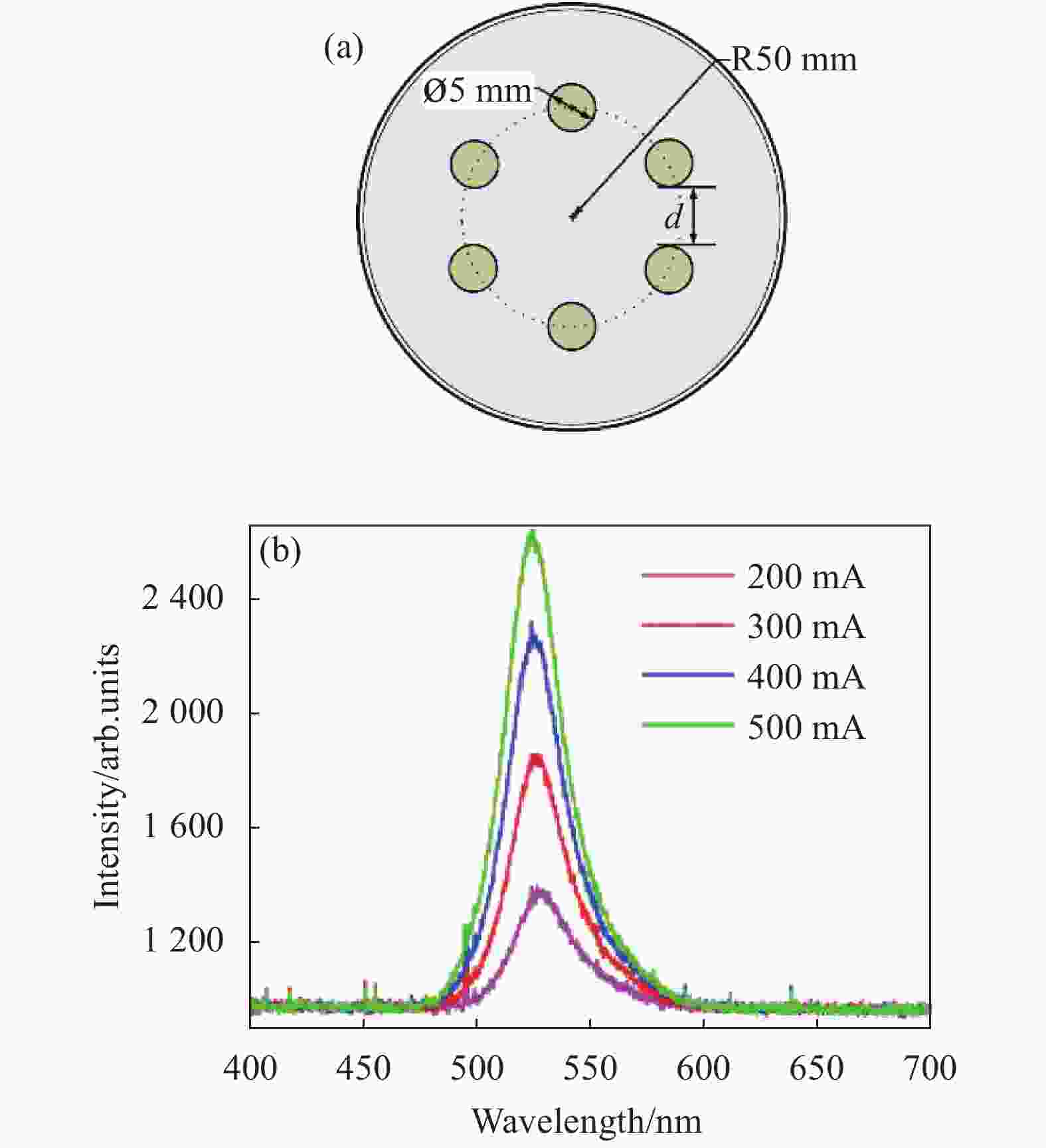
图 2 绿光LED。 (a) LED阵列结构; (b)电致发光谱
Figure 2. Green LED. (a) structure of LED array; (b) EL spectra
-
光电二极管(photo-diode,PD)是把光信号转变为电信号的光电器件。PIN二极管和雪崩二极管(avalanche photodiode, APD)为最常见的光电二极管。系统采用具有极高灵敏度、低噪声和超快响应时间的PMT作为光探测器件,此真空电子器件可用于极限微弱光探测,成为水下远距离光通信的重要器件[2-3]。其工作原理为:光波透过其入射窗激励光阴极面产生光电效应,使光电子向真空放出,再经聚焦级汇集到倍增系统,最后由末极倍增极发射二次电子通过阳极输出。
如图3(a)所示,系统选用滨松光子(Hamamatsu Photonics)公司型号为H10493-003的电压输出型PMT模块,其光谱响应范围为300~650 m、带宽达8 MHz、感光面积直径ϕ22 mm、电流电压转换系数为0.1 V/μA、外形尺寸ϕ35×120 mm。接收端由3支相同型号的PMT构成阵列,如图3(b)所示。
为了使接送端达到各路径的独立衰落副本,PMT间距d应大于水下信道相干长度[9]:
$$\rho ={{\left[ 44.2K{{\left( \frac{2\pi }{\lambda } \right)}^{2}}L \right]}^{-{}^{3}\!\!\diagup\!\!{}_{5}\;}}$$ (2) 式中:K为水下湍流强度,取值为10−8~10−14 m−2/3,弱湍流强度常取10−12~10−14 m−2/3;L为链路距离(10 m);λ为光波长(445 nm)。经计算,在10 m弱湍流条件下,相干长度ρ取值约0.1~1.7 cm,实际的PMT间距容易满足此条件[9]。
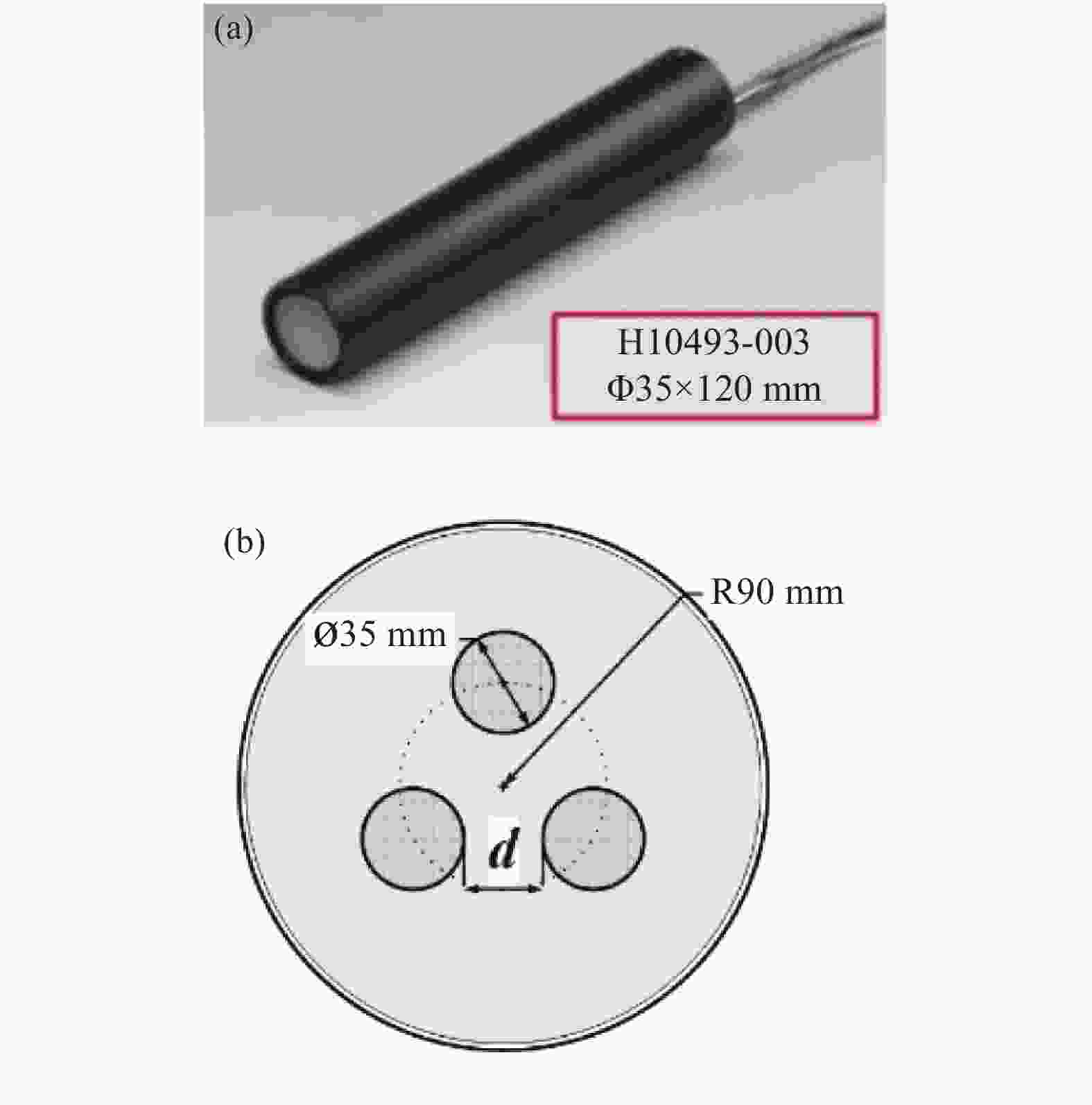
图 3 接收端PMT。 (a) PMT外形; (b) PMT阵列结构
Figure 3. PMT of receiver. (a) Appearance of PMT; (b) Structure of PMTs array
-
为了适应因链路距离等引起的光信号强较弱变化,设计了闭环负反馈自动增益控制(automatic gain control, AGC)环节,即放大电路的增益自动地随信号强度而调整,达到稳定并维持输出信号幅度的目的。如图4所示,前置放大器输出电压信号经压控放大器(voltage-controlled amplifier, VCA) VCA81处理,再输出送入运放AD828第一级做二阶压控高通滤波器输出。AD828第二级做全波整流器使用,采集VCA810输出信号幅度,由STC单片机控制数字电位器(digital potentiometer) X9C103做自动增益控制调节使用,产生控制电压0~−2 V,控制VCA810增益−40~40 dB。
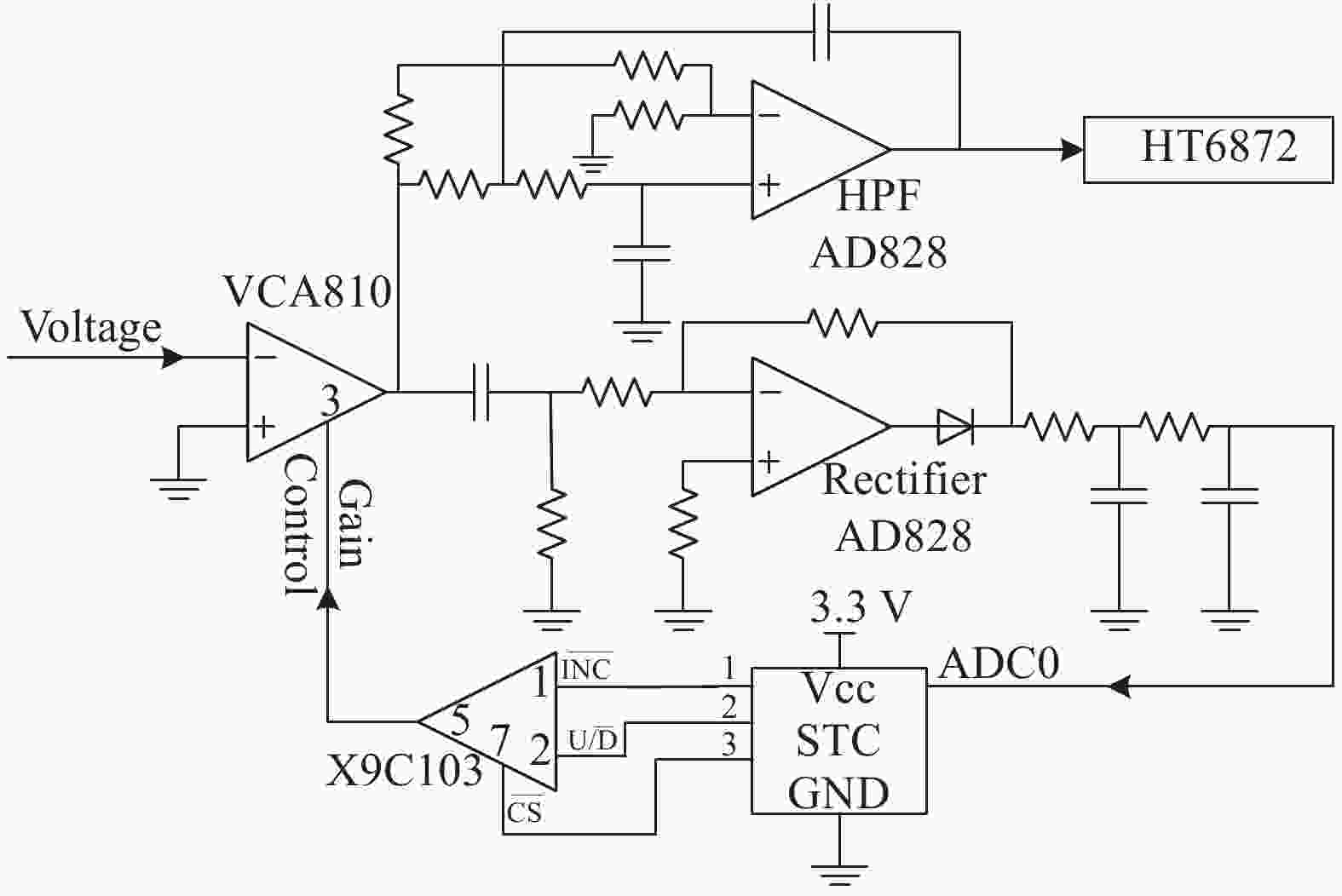
图 4 自动增益控制电路构成
Figure 4. Circuit configuration of AGC
-
水下是时域、空域时变信道[13],光波在水下传输会经历复杂的生化(Physio-chemical)现象,分析光波在水下的基本特性,有助于水下信道的建模及系统的设计。水下固有光学特性(Inherent optical properties, IOP)和水下表观光学特性(Apparent optical properties, AOP)[3]。
吸收系数表示为:
$$ a(\lambda ) = {a_w}(\lambda ) + {a_{CD{\rm{OM}}}}(\lambda ) + {a_{phy}}(\lambda ) + {a_{\det }}(\lambda ) $$ (3) 式中:右侧各项依次表示纯海水(Seawater)、有色可溶性有机物(Colored dissolved organic material, CDOM),又称黄色物质(Yellow substance)、浮游植物(Phytoplankton)中的叶绿素(Chlorophyll)、非色素悬浮粒子,又称腐质(Detritus)的吸收系数。吸收系数与波长有关,如纯海水的最低吸收窗为400~500 nm蓝绿波段。
光子与水分子及其他悬浮物质作用,还形成了散射现象,并不消耗能量,散射系数表示为:
$$ b(\lambda ) = {b_w}(\lambda ) + {b_{CDMA}}(\lambda ) + {b_{phy}}(\lambda ) + {b_{\det }}(\lambda ) $$ (4) 式中:各项与公式(3)类似,为相应物质的散射系数,通常bCDMA(λ)可忽略不计。另外,散射系数还与悬浮物质的浓度有关,而产生瑞利散射或米耶散射[2-5]。
体散射函数(Volume scattering function, VSF),能精确的描述散射现象,即在某方向上单位散射体积、单位立体角内散射辐射强度与入射体积上的辐射照度之比。散射相位函数(Scattering phase function,SPF)表征散射方向的概率分布,定义为:
$$\tilde \beta (\theta ,\lambda ) = \frac{{\beta (\theta ,\lambda )}}{{b(\lambda )}}$$ (5) 式中:β(θ,λ)为体散射函数;b(λ)为散射系数。散射相位函数很难测量,常用(Henyey-Greenstein, HG)函数代替:
$$\tilde{\beta }(\theta ,{\rm{g}})={{P}_{\rm{HG}}{}}(\theta ,{\rm{g}})=\frac{1}{4\pi }\frac{1-{{g}^{2}}}{{{(1+{{g}^{2}}-2g\cos \theta )}^{{}^{3}\!\!\diagup\!\!{}_{2}\;}}}$$ (6) 式中:g为调整前向与后向散射相对大小的因子,g越接近1则光更有可能向前散射,g越接近−1则更加有可能向后散射。g的值等于全部散射角余弦的平均值。文献表明,g取0.924对于大多数水体都有比较好的近似[14]。但是,HG函数在较小与较大散射角范围的表现不够好,因此提出更为精确的二阶HG函数(Two-Term Henyey-Greenstein, TTHG)函数:
$$\tilde \beta (\theta ,\alpha ,{g_f},{g_b}) = \alpha \tilde \beta (\theta ,{g_f}) + (1 - \alpha )\tilde \beta (\theta , - {g_b})$$ (7) 式中:α为前向HG函数加权值;gf和gb分别为前向、后向HG函数因子。
朗伯-比尔定律(Lambert’s law)描述光在介质中传播时的衰减作用,严格来说只适用于单色光:
$${{P}_{R}}(cd)={{P}_{T}}\exp \left[ -\left( 1-\eta {{\omega }_{0}} \right)cd \right],{{\omega }_{0}}={b}/{c}\;$$ (8) 式中:PT为发射光功率;PR为接收光功率;d为链路距离;η为散射因子(Scattering factor),其取值为0~1,描述所接收到的多重散射光所占的比例,是关于水的光学特性和接收器偏振态、孔径和初始光源状态的复杂函数;ω0为散射反照度(Scattering albedo)。此式表示接收功率与衰减长度(Attenuation length) cd和散射因子间的函数关系。
水下信道直流增益为:
$${H_{los}}{\rm{(0) = }}\frac{{(m + 1){A_{PD}}}}{{2\pi {d^2}}} \cdot \cos (\alpha ) \cdot {\cos ^m}(\beta ) \cdot g(\alpha )$$ (9) 式中:m为郎伯模型阶数;APD为接收端光电管有效面积;α为光入射角;β为光辐射角;g(α)为接收端透镜增益。
则接收端光功率表示为:
$${P_R}(d) = {P_T}\exp \left[ { - \left( {1 - \eta {\omega _0}} \right)cd} \right]{H_{los}}(0)$$ (10) 潮汐等引起的水下湍流是水下通信不可回避的问题。水体的温度、盐度、气泡等是影响湍流的重要因素。湍流现象将导致接收端光强闪烁等不利现象。
-
MIMO利用收发两端多天线实现了多发多收,可获得时间分集、空间分集和频率分集的分集增益(Diversity gain)。另外,可充分利用空间独立子信道和自由度发送不同的信息流,可获得空间复用或复用增益(Multiplexing gain)。当发送功率和带宽不变时,MIMO信道容量随收发两端最小天线数的增加而线性增加,而MISO/SIMO容量仅正比于天线数的对数[6]。对于水下衰落信道,一般只有接收端已知缓变的信道矩阵H,可定义遍历容量和中断容量[6]。遍历容量是所有信道平均后的最大可传输速率,表示为:
$$C = \mathop {\max }\limits_{{{\boldsymbol{R}}_x}:Tr({{\boldsymbol{R}}_x}) = \rho } E\left[ {W{{\log }_2}\det [{{\boldsymbol{I}}_{{M_r}}} + {\boldsymbol{H}}{{\boldsymbol{R}}_x}{{\boldsymbol{H}}^{\rm{T}}}]} \right]$$ (11) 式中,H=U
$ \displaystyle\sum $ VT为信道矩阵的奇异值分解;U是Mr×Mr矩阵;V是Mt×Mt矩阵;T为矩阵转置运算;Mr和Mt分别为接收和发送端天线数目;$ \displaystyle\sum $ 是半正定Mr×Mt阶对角矩阵;U和V矩阵都是酉矩阵,一般指幺正矩阵(unitary matrix); Rx为信道输入的协方差矩阵;W是信道带宽;${{\boldsymbol{I}}_{{M_r}}} = {{\boldsymbol{U}}^{\rm T}}{\boldsymbol{U}}$ 。当${{\boldsymbol{R}}_{x}}={\rho }/{{{M}_{t}}}\;{{\boldsymbol{I}}_{{{M}_{t}}}}$ 条件下,其中ρ为信噪比,公式(11)取得最大值。 -
如图5所示,系统采用室内10 m水槽模拟水下信道,水槽两端安装了对可见光透射率良好的光学玻璃。市政用水中添加氢氧化铝、氢氧化镁混合物(Maalox)粉末可模拟海水水质。为水槽配备了盖子,以减小环境光的干扰。对于室内水槽,可使用水温控制、气泡生成、机械搅动等方法近似模拟海洋湍流[15]。

图 5 室内水槽。 (a) 水槽长度10 m,光学玻璃直径300 mm; (b) 水槽注水
Figure 5. Indoor water tank. (a) Tank length 10 m, optical glass with a diameter of 300 mm; (b) Water injection
-
如图6(a)所示,通过MATLAB软件仿真室内10 m水下信道环境下,接收端平面的光功率分布[16]。最大接收光功率为−35.8 dBm或0.26 μW。如图6(a),LED阵列可看成点光源。如图6(b)所示,为某参数下形成的,光强分布差异较大情况,可明显看成各光束的强度分布。主要仿真参数为:传输光功率约5 W、LED半功率角7.5°、水下衰减系数0.056 m−1、PMT感光面积4.84 cm2、水槽长宽高10 m×0.8 m×0.8 m。LED间距2 cm、PMT间距3 cm,均满足不相干间距条件。

图 6 水下信道接收光功率MATLAB仿真。 (a) 形成点光源; (b) 非点光源情形
Figure 6. Underwater channel received optical power distribution MATLAB simulation. (a) Formation of point lamp; (b) Non-point lamp
-
如图7所示,发送端绿光LED阵列发送光束透过水槽,接收端接收衰减后的光信号。

图 7 光信号通过水下信道
Figure 7. Optical signal through the underwater channel
如图8(a)所示为PMT接收端阳极电压波形,并由电流电压转换系数0.1 V/μA推导出阴极电流波形。

图 8 PMT测试波形 。(a) 阳极输出电压与阴极输出电流; (b) 辐射功率与阴极输出电流
Figure 8. PMT test waveform. (a) Anode output voltage and cathode output current ;(b) Radiation power and cathode output current
阴极电流可表示为:
$${I_k} = \frac{{\eta eP\lambda }}{{hc}}$$ (12) 式中:η为量子效率;e为电子电荷;λ为光波长;h为普朗克常数;c为光速;P为光辐射功率。
其中,量子效率表示为:
$$\eta = \frac{{hc}}{{\lambda e}}{S_K} = \frac{{1240}}{\lambda }{S_K} \approx 20.8{\rm{\% }}$$ (13) 式中:SK=88 mA/W,为辐射灵敏度。
如图8(b)所示,辐射光功率可表示为:
$$P = \frac{{hc{I_k}}}{{\lambda e\eta }} = \frac{{0.0237{I_k}}}{\eta } \approx 0.114{I_k}$$ (14) -
噪声主要来源于无光照下的暗电流和光信号引起的散粒噪声。噪声指数F表示为:
$$F = \left( {{1 / \alpha }} \right) \cdot \left( {{1 / {{\delta _1} + {1 / {{\delta _1}{\delta _2} + \cdots {1 / {{\delta _1}{\delta _2} \cdots {\delta _n}}}}}}}} \right)$$ (15) 式中:α为收集效率;δ1、δ2、…δn为各级倍增级的二次电子发射系数。若α=1、δ1=δ2…δn=δ,则公式(15)可简化为:
$$F \approx \delta /(\delta - 1)$$ (16) 噪声电流可表示为:
$${I_n} = \mu {\left( {2e{I_k}\alpha BF} \right)^{{1 / 2}}}$$ (17) 式中:μ为电流增益;e为电子电荷;Ik为阴极电流;B为测量系统的带宽。
PMT平均阳极电流可表示为:
$${I_s} = {I_k}\alpha \mu $$ (18) 则PMT信噪比表示为:
$$SNR \!\approx\! \frac{{{I_s}}}{{{I_n}}} \!=\! {\left. {\left( {\frac{{{I_k}\alpha }}{{2eB}} \cdot \frac{1}{{1 + {1 / {{\delta _1} \!+\! {1 / {{\delta _1}{\delta _2} + \cdots {1 / {{\delta _1}{\delta _2} \cdots {\delta _n}}}}}}}}}} \right.} \right)^{{1 /2}}}$$ (19) 可化简为:
$$SNR \approx \frac{{{I_s}}}{{{I_n}}} = \sqrt {\frac{{{I_k}}}{{2eB}} \cdot \frac{1}{{\delta /\left( {\delta - 1} \right)}}} $$ (20) 如果不考虑噪声在倍增过程中的放大问题,另二次电子发射系数δ=6,则信噪比可简化为:
$$SNR \approx {\left( {{I_k}/2eB} \right)^{{1 / 2}}} \approx 1.75 \times {10^3}\sqrt {\frac{{{I_k}({ \text{μ}{\rm{A}}})}}{{B(\rm{MHz})}}} \approx 19.4\;\rm{dB}$$ (21) 则系统的误码率可估算为:
$${P_e} = \frac{1}{2}erfc\left( {\sqrt {\frac{{SNR}}{2}} } \right) \approx 1.1 \times {10^{ - 5}}$$ (22) 式中:
$erfc(x) = \dfrac{2}{{\sqrt \pi }}\displaystyle\int_x^\infty {\exp ( - {t^2}){\rm{d}}t}$ 为互补误差函数。理论上PMT最小检测功率值为:$${P_i} \!=\! \frac{{e \cdot \mu \cdot F \cdot B}}{{{S_k}}} \!+\! \frac{{\sqrt {{{\left( {e \cdot \mu \cdot F \cdot B} \right)}^2} \!+\! 4e \cdot {I_k} \cdot \mu \cdot F} }}{{{S_k}}} \approx 1.5 \times {10^{ - 9}}\;\rm{W}$$ (23) 式中:SK=88 mA/W,为辐射灵敏度;μ=105,为电流放大倍数;Ik=1 μA,为阴极电流;F=5/6,为噪声系数;B=8 MHz,为系统带宽。说明了PMT具有的极高灵敏度。
-
对不同发射、接收天线数目的MIMO间做性能对比分析时,要求发送端不管如何分集,都要求发送总功率相等,接收端不管如何分集,都要求接收端总有效感应面积相等[8, 17]。这需要针对LED的功率和PMT的有效面积等进行细致严格的选型,因此,通过实验进行MIMO的性能测试与分析有一定的困难。
蒙特卡洛(Monte Carlo)仿真方法已广泛应用在自由空间或水下信道仿真中[18],并表现出来与实际场景较为贴切的仿真结果。蒙特卡洛仿真主要分为:发送端初始化、光子传输和光子接收等部分。海洋湍流模型比较复杂,类似与自由空间光通信,水下湍流也多采用对数正态(Lognormal),负指数(Negative exponential),K分布(K-distribution),伽马(Gamma),威布尔(Weibull),指数-威布尔(Exponentiated Weibull)分布等湍流模型[15]。文中采用常用的对数正态分布湍流模型,湍流衰落系数(Fading coefficient)表示为α2,其中α的概率密度函数为[10]:
$${f_\alpha }(\alpha ) = \frac{1}{{\alpha \sqrt {2\pi \sigma _X^2} }}\exp \left\{ { - \frac{{{{(\ln \alpha - {\mu _X})}^2}}}{{2\sigma _X^2}}} \right\},\alpha > 0$$ (24) 式中:μX和σX2分别为lnα的均值和方差,α数值越大表明湍流作用越强。结合公式(10),考虑湍流作用下的接收光功率公式为:
$${P_R}(d) = {P_T}\exp \left[ { - \left( {1 - \eta {\omega _0}} \right)cd} \right]{H_{los}}(0){\alpha ^2}$$ (25) 如图9所示,在强湍流作用下α=0.9,应用Monte Carlo仿真得出信道容量与信噪比间关系曲线。如图可知,随着收发两端天线数的增加,MIMO系统相对SISO可显著提升信道容量。特别在信噪比较大(15 dB)以上时,性能提升更为明显。说明采用MIMO技术,可在不增加频谱和发送功率的条件下,信道容量显著提升,间接表明MIMO在抑制水下湍流现象的明显优势。

图 9 信道容量与信噪比关系
Figure 9. Relationship between channel capacity and SNR
-
所述水下无线光通信系统的发送端绿光LED阵列与接收端PMT阵列形成了6×3 MIMO传输方式,在室内10 m水槽条件下实现了1 Mbps的传输速率。重点对MIMO水下无线光通信系统构成、发送端绿光LED阵列与接收端PMT阵列结构及优势特点进行了阐述。通过测试PMT阳极输出电压及阴极输出电流及信噪比的计算,验证了PMT具有高灵敏度、低噪声、高信噪比等特点。理论分析得到其最小接收光功率可低至10−9 W量级,为水下远距离无线光通信提供了条件。最后,通过Monte Carlo仿真对各种MIMO模式与SISO在湍流下性能进行了分析,进一步证实了MIMO相对于SISO的性能优势。
MIMO scheme for underwater wireless optical communication system using PMT array
-
摘要: 水下无线光通信具有的高带宽、低时延等特点,已成为水下通信的可行选择。系统发送端光源由6只绿光发光二极管(LED)构成阵列,接收端由3只光电倍增管(PMT)构成阵列,形成了6×3的多输入多输出(MIMO)传输方式。在室内10 m水槽水下信道下,实现了1 Mbps的信息传输速率。通过MATLAB软件对接收平面光功率分布仿真,最大值为−35.8 dBm。此外,测试了PMT阳极输出电压波形,并推导出阴极电流波形。理论计算得出信噪比为19.4 dB,理论误码率约为1.1×10−5。所选PMT模块理论上最小接收功率可低至1.5×10−9 W,体现出极高的探测灵敏度。最后,通过蒙特卡洛(Monte Carlo)数字仿真说明,在信噪比25 dB可达到约35 bit·s-1·Hz-1的信道容量。Abstract: Underwater wireless optical communication (UWOC) has the characteristics of high bandwidth and low latency, and have become a viable alternative for underwater communication. The transmitter and receiver arrays of this system are composed of six green light emitting diode (LED) and three photomultiplier tube (PMT), respectively, and forming a 6×3 multiple input multiple output (MIMO) transmission mode. This system achieved a 1 Mbps data transmission rate over a distance of 10 m water tank underwater channel. MATLAB was adopted to simulate this underwater channel model and predict the received optical power distribution on the receiving plane and the maximum value is −35.8 dBm. Moreover, the PMT anode output voltage and the cathode current waveform were tested. Derivation and calculation show that the signal-to-noise ratio (SNR) is 19.4 dB, and the bit error rate (BER) is approximately 1.1×10−5. The theoretical minimum received power of the this PMT module can be as low as 1.5×10−9 W, which reflects its extremely high sensitivity. Finally, through Monte Carlo channel simulation, the performance of MIMO is further verified, and the channel capacity of 35 bit·s-1·Hz-1 can be reached at a SNR of 25 dB.
-
Key words:
- underwater wireless optical communication /
- MIMO /
- green LED /
- PMT arrays
-
图 2 绿光LED。 (a) LED阵列结构; (b)电致发光谱
Figure 2. Green LED. (a) structure of LED array; (b) EL spectra
图 3 接收端PMT。 (a) PMT外形; (b) PMT阵列结构
Figure 3. PMT of receiver. (a) Appearance of PMT; (b) Structure of PMTs array
图 5 室内水槽。 (a) 水槽长度10 m,光学玻璃直径300 mm; (b) 水槽注水
Figure 5. Indoor water tank. (a) Tank length 10 m, optical glass with a diameter of 300 mm; (b) Water injection
图 6 水下信道接收光功率MATLAB仿真。 (a) 形成点光源; (b) 非点光源情形
Figure 6. Underwater channel received optical power distribution MATLAB simulation. (a) Formation of point lamp; (b) Non-point lamp
图 8 PMT测试波形 。(a) 阳极输出电压与阴极输出电流; (b) 辐射功率与阴极输出电流
Figure 8. PMT test waveform. (a) Anode output voltage and cathode output current ;(b) Radiation power and cathode output current
-
[1] Chi N, Chen H. Progress and prospect of high-speed visible light communication [J]. Opto-Electron Eng, 2020, 47(3): 190687. (in Chinese) doi: 10.12086/oee.2020.190687 [2] Kaushal H, Kaddoum G. Underwater optical wireless communication [J]. IEEE Access, 2016, 4: 1518-1547. doi: 10.1109/ACCESS.2016.2552538 [3] Zeng Zhaoquan, Fu Shu, Zhang Huihui, et al. A survey of underwater optical wireless communications [J]. IEEE Commun Surveys Tuts, 2017, 19(1): 204-238. doi: 10.1109/COMST.2016.2618841 [4] Xu Jing. Underwater wireless optical communication: why, what, and how? [J]. Chin Opt Lett, 2019, 17(10): 1-10. [5] Ye Demao, Liu Yuan, Wang Yantao, et al. Underwater LED optical communication technology of real-time error detection [J]. Infrared and Laser Engineering, 2019, 48(9): 0918001. (in Chinese) doi: 10.3788/IRLA201948.0918001 [6] 柯熙政, 谌娟, 邓莉君. 无线光MIMO系统中空时编码理论[M]. 北京: 科学出版社, 2014: 168-186. [7] Wang Huiqin, Ke Xizheng. Atmosphere laser communication in MIMO channels and its key techniques [J]. Laser journal, 2008, 29(3): 52-54. (in Chinese) doi: 10.3969/j.issn.0253-2743.2008.03.024 [8] Jamali M V, Salehi J A, Akhoundi F. Performance studies of underwater wireless optical communication systems with spatial diversity: MIMO Scheme [J]. IEEE Trans on Commun, 2017, 65: 1176-1192. doi: 10.1109/TCOMM.2016.2642943 [9] Liu Weihao, Xu Zhengyuan, Yang Liuqing. SIMO detection schemes for underwater optical wireless communication under turbulence [J]. Photon Res, 2015, 3: 48-53. doi: 10.1364/PRJ.3.000048 [10] Dong Yuhan, Liu Jinxing. On BER performance of underwater wireless optical MISO links under weak turbulence[C]//Proc. of Oceans 2016, 2016: 1–4. [11] Li Jiehui, Wang Fumin, Zhao Mingming, et al. Large-coverage underwater visible light communication system based on blue LED employing equal gain combining with integrated PIN array reception [J]. Applied Optics, 2019, 58: 383-388. doi: 10.1364/AO.58.000383 [12] Li Jinjia, Yang Bo, Ye Demao, et al. A real-time, full-duplex system for underwater wireless optical communication: hardware structure and optical link model [J]. IEEE Access, 2020, 8: 109372-109387. doi: 10.1109/ACCESS.2020.3001213 [13] Zhang Yufan, Xu Jing. Temporal and spatial methods in ocean optical systems [J]. Infrared and Laser Engineering, 2019, 49(2): 0203003. (in Chinese) doi: 10.3788/IRLA202049.0203003 [14] Gabriel C, Khalighi M A, Bourennane S, et al. Monte-Carlo-based channel characterization for underwater optical communication systems [J]. J Opt Commun Netw, 2013, 5: 1-12. doi: 10.1364/JOCN.5.000001 [15] Jamali M V, Mirani A, Parsay A, et al. Statistical studies of fading in underwater wireless optical channels in the presence of air bubble, temperature, and salinity random variations [J]. IEEE Trans Commun, 2018, 66: 4706-4723. [16] Ghassemlooy Z, Popoola W, Rajbhandari S. Optical Wireless Communications: System and Channel Modelling with Matlab[M]. 1th ed. New York: CRC Press, 2013. [17] Nezamalhosseini S A, Chen L R. Optimal power allocation for MIMO underwater wireless optical communication systems using channel state information at the transmitter [J]. IEEE Journal of Oceanic Engineering, 2020, 99: 1-7. doi: 10.1109/JOE.2019.2963551 [18] Cox W, Muth J. Simulating channel losses in an underwater optical communication system [J]. J Opt Soc Amer A, Opt Image Sci, 2014, 31: 920-934. doi: 10.1364/JOSAA.31.000920 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 955
- HTML全文浏览量: 300
- PDF下载量: 92
- 被引次数: 0































