













-
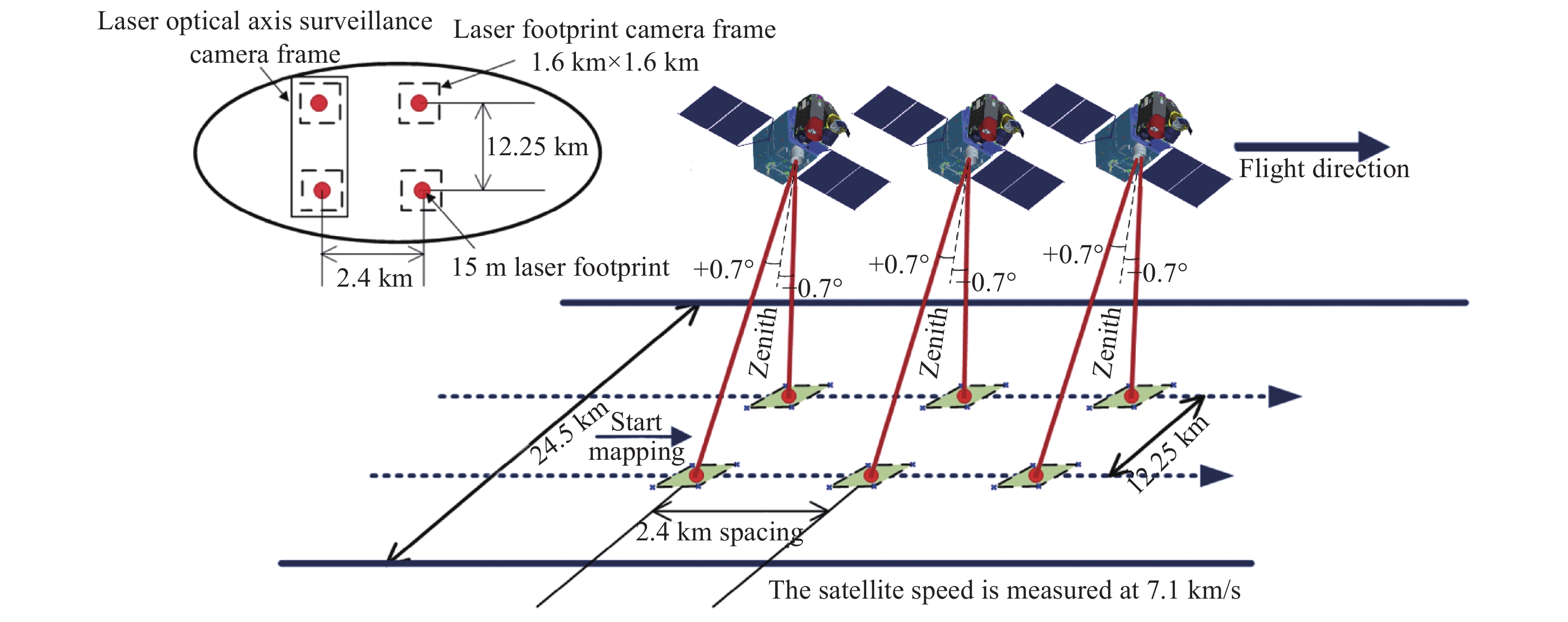
星载激光测高仪凭借其较高的测距精度,近十几年来已经开始应用于对地观测,服务于测绘、极地、林业等行业开展广泛的应用。2020年11月3日,高分七号卫星(GaoFen, GF-7)在我国太原卫星发射中心成功发射在轨,该卫星是我国首颗亚米级测绘立体卫星,除搭载了2台高分辨率光学线阵相机外,还搭载一套星载激光测高系统,用于辅助开展全球1∶10000立体测图。GF-7星载激光测高系统是我国首台正式用于对地观测的星载激光测高系统,共搭载了4台激光器(2台主份,默认开机,以下称为波束1和波束2,另外2台为各自备份,默认不开机),2台足印相机以及1台光轴监视相机[1]。该激光测高系统采用双波束激光同时对地观测,足印相机在激光出光时刻同时对激光光斑与地面成像,光轴监视相机用于星上同步捕获2束激光光斑,监视激光光轴变化。GF-7星载激光采用3/6 Hz测量模式,沿轨向每个波束前后光斑间距约2.4 km (3 Hz),垂轨向两波束间距约12.25 km[2],如图1所示。
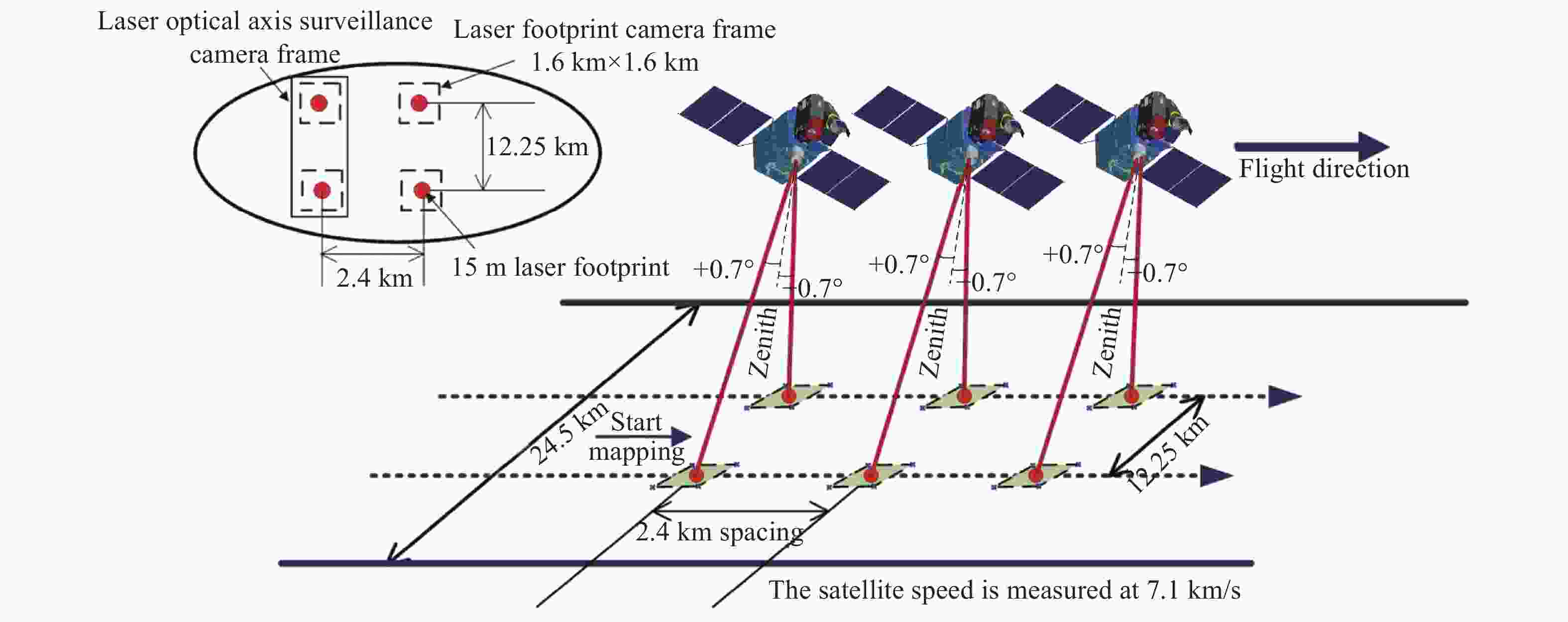
图 1 GF-7星载激光测高系统对地观测示意图
Figure 1. Earth observation diagram of GF-7 spaceborne laser altimetry system
GF-7星载激光测高系统主要用于辅助光学立体相机提高无控制测图的高程精度,其几何定位精度特别是高程精度成为了关注重点。卫星在轨后,提高星载激光几何定位精度的主要手段是在轨几何检校,目前检校方法有基于地面探测器检校法[3-4]、基于地形匹配检校法[5]、基于卫星姿态机动检校法[6]、基于机载红外相机检校法[7]。其中卫星姿态机动检校对于目前GF-7和资源三号卫星等3轴姿态稳定的测绘卫星难以实现,基于机载红外探测器检校法耗资大、精度低、成功率小[8]。针对GF-7星载激光测高仪可采用的检校方法为基于地面探测器检校、地形匹配检校。同时结合GF-7特有的足印相机,还可采用基于单片足印影像的检校[9]。
为了评估GF-7星载激光测高仪在上述3种方法检校后高程测量精度差异,文中选取GF-7星载激光测高仪同一轨激光数据,分别对波束1与波束2同时开展了以上3种检校试验,获取两波束检校后的指向结果。并以江苏平地地区机载雷达点云为验证数据,对3组指向下的激光测高精度进行分析,评价3种检校方法的精度,同时评估GF-7星载激光测高仪各波束的测高精度。
-
对于单波束星载激光,考虑激光发射位置相对卫星平台质心、全球定位系统(Global Positioning System, GPS)天线位置,从而构建激光与卫星间的几何旋转关系。根据单个波束激光与卫星间的几何旋转关系,结合航天摄影测量中坐标系转换模型[10],推导出单个波束在轨几何检校模型,如公式(1)所示:
$$\begin{split} \left[\!\! {\begin{array}{*{20}{c}} {{X_1}} \\ {{Y_1}} \\ {{Z_1}} \end{array}}\right]_{WGS84} \!=& \left[\!\!{\begin{array}{*{20}{c}} X \\ Y \\ Z \end{array}}\right]_{GPS} \!\!+\! R_{J2000}^{WGS84}R_{body}^{J2000}\left\{ \left[\!\! {\begin{array}{*{20}{c}} {{\rm d}{x_1}} \\ {{\rm d}{y_1}} \\ {{\rm d}{{\textit{z}}_1}} \end{array}}\right] +({\rho _1} \!-\! {\rho _{atm}} \!-\! \right.\\ & \left. \left[ \begin{gathered} \cos ({\alpha _1} + \Delta {\alpha _1})\cos ({\beta _1} + \Delta {\beta _1}) \hfill \\ \cos ({\beta _1} + \Delta {\beta _1})\cos ({\alpha _1} + \Delta {\alpha _1}) \hfill \\ \sin ({\beta _1} + \Delta {\beta _1}) \hfill \\ \end{gathered} \right] \right\} \end{split}$$ (1) 式中:
${\left[ {\begin{array}{*{20}{c}} {{X_1}} \\ {{Y_1}} \\ {{Z_1}} \end{array}} \right]_{WGS84}}$ 为波束1足印光斑质心在$WGS84$ 坐标系下地面坐标;${\left[ {\begin{array}{*{20}{c}} X \\ Y \\ Z \end{array}} \right]_{GPS}}$ 为卫星GPS天线中心在$WGS84$ 坐标系下坐标;$\left[ {\begin{array}{*{20}{c}} {{\rm d}{x_1}} \\ {{\rm d}{y_1}} \\ {{\rm d}{{\textit{z}}_1}} \end{array}} \right]$ 为波束1相对于GPS天线中心的偏移量;$R_{body}^{J2000}$ 为卫星本体坐标系到$J2000$ 坐标系下的旋转矩阵;$R_{J2000}^{WGS84}$ 为$J2000$ 坐标系到$WGS84$ 坐标系下的旋转矩阵;${\;\rho _1}$ 为波束1激光测距值;${\;\rho _{atm}}$ 为大气延迟引起的测距误差;${\;\rho _{tides}}$ 为地球潮汐引起的测距误差;$\Delta {\rho _1}$ 为波束1待求的测距系统误差;${\alpha _1}$ 为波束1指向角在卫星本体系XOY面的投影与X轴的夹角;${\;\beta _1}$ 为波束1光轴与其在卫星本体系XOY面的投影的夹角;$\Delta {\alpha _1}$ 与$\Delta {\beta _1}$ 分别为${\alpha _1}$ 和${\;\beta _1}$ 的待求指向修正值。GF-7星载激光测高系统采用双波束同时对地观测,波束2激光几何检校模型与上述波束1基本一致,其指向关系通过与波束1光轴的相对固连安装进行转换得到,从而构建两波束星载激光联合检校模型。
-
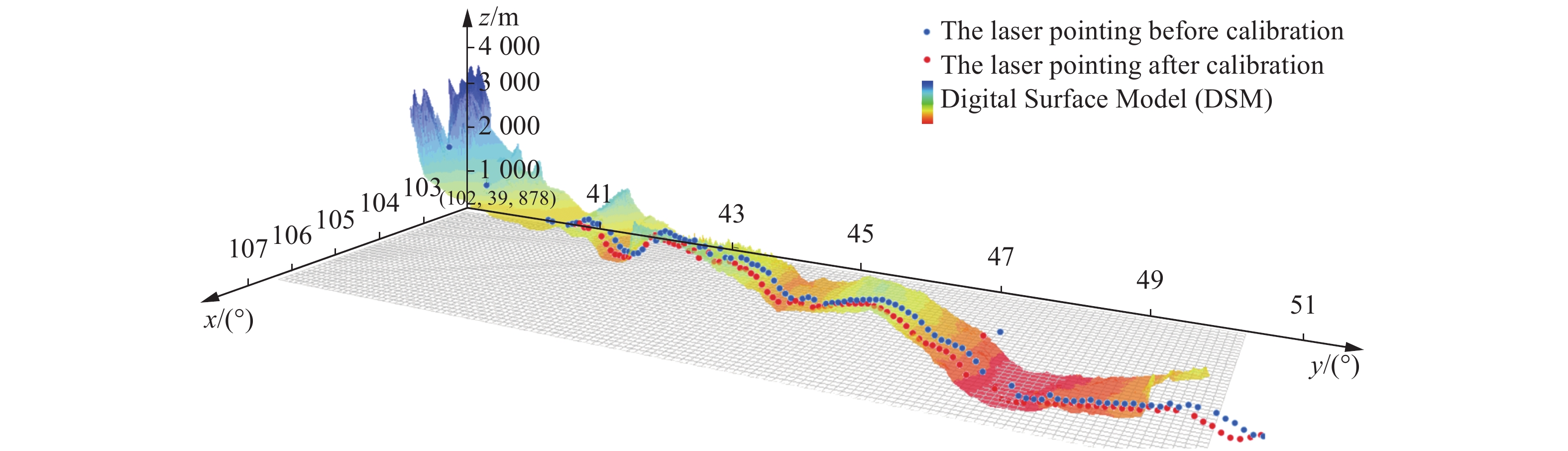
由于星地间距离较远,较小的指向误差会引起较大的平面误差。对于非平地地形,平面误差越大,激光高程测量精度越低。采用不同的指向进行地面高程测量时,即便是同一区域会得到不同的高程值。理论上,只有正确指向角计算出的高程与真实地形数据才最为接近[11]。基于这一原则,研究学者提出了一种基于地形匹配的星载激光测高仪在轨几何检校方法[5],该检校方法示意图如图2所示。
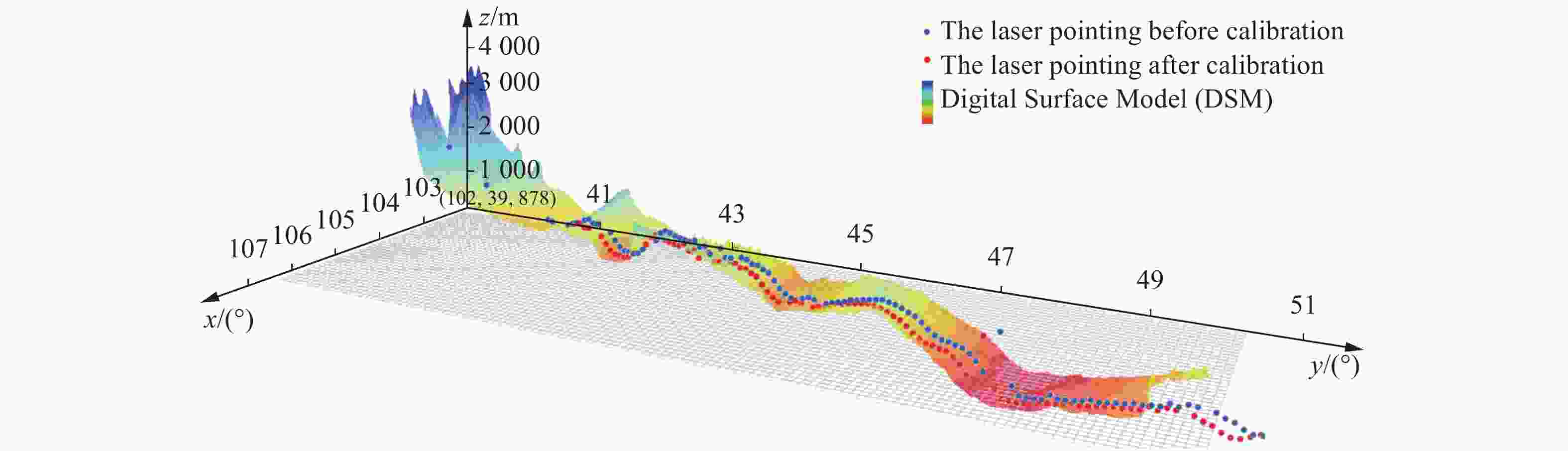
图 2 基于地形匹配的星载激光几何检校示意图
Figure 2. Geometric calibration diagram of spaceborne laser based on terrain matching
基于地形匹配的星载激光几何检校主要分为以下3个步骤:
(1)设置指向角格网
以星载激光测高仪初始指向为中心,分别设置指向角
$\alpha $ 和$\;\beta $ 的范围,以及它们各自的格网间距${\rm d}\alpha$ 和${\rm d}\beta$ ,形成$m × n$ 个格网,获得$m \times n$ 个指向角。其中,$m = \dfrac{\alpha }{{{\rm d}\alpha }}$ ;$n = \dfrac{\beta }{{{\rm d}\beta }}$ 。(2)基于格网指向角的高程残差计算
挑选至少50个以上的有效的激光点数据,依次取出指向角格网中每个指向角,分别带入星载激光测高仪几何定位模型[12],计算每一个试验激光点的地面高程,并与高精度数字地表模型(Digital Surface Model, DSM)对比,获取每一个激光点的高程差值。并统计每个指向条件下的所有试验激光点与DSM高程差值的残差。
(3)星载激光最优指向确定
利用指向角与其对应的激光点与DSM高程差的残差值,进行三元二次曲面拟合,并计算拟合曲面的最小值,最小值对应指向即为激光最优指向。
-
GF-7星载激光测高系统搭载了2台足印相机,足印影像幅宽为1.6 km,地面分辨率为3.2 m,用于同时捕获地表信息和激光光斑[1-2]。足印影像中的激光光斑亮度值(Digital Number, DN)与激光能量在空间分布相似,同样呈二维高斯曲面分布,中心能量最高,并向周围递减,故采用高斯曲面拟合方法提取足印影像中光斑质心像平面坐标[13]。
根据单片足印影像提取的激光光斑质心像平面坐标,结合面阵相机成像原理,根据足印相机相对卫星平台、全球导航卫星系统(Global Navigation Sate-llite System, GNSS)相位中心的安装关系,以及地球椭球面的相对位置偏移和旋转几何关系,构建的星载激光足印相机严格的几何成像模型,如下式所示。直接解算出激光足印中心在地面的坐标
${\left[ {\begin{array}{*{20}{c}} {{X_g}}&{{Y_g}}&{{Z_g}} \end{array}} \right]^{\rm{T}}}$ 。$$\begin{split} \left[ {\begin{array}{*{20}{c}} {{X_g}} \\ {{Y_g}} \\ {{Z_g}} \end{array}} \right]{\rm{ = }}&\left[ {\begin{array}{*{20}{c}} {{X_s}} \\ {{Y_s}} \\ {{Z_s}} \end{array}} \right] + \lambda R_{ICRF}^{ITRF}R_{BOD}^{ICRF}(pitch,roll,yaw) \cdot \\ &R_{CAM}^{BOD}\left[ \begin{gathered} \tan \left[ {{\psi _x}(s,l)} \right] \hfill \\ \tan \left[ {{\psi _y}(s,l)} \right] \hfill \\ {{ -1 }} \hfill \\ \end{gathered} \right] \end{split}$$ (2) 式中:
$\left( {s,l} \right)$ 为足印相机探元在像平面坐标系统下坐标;${\psi _x}$ 和${\psi _y}$ 分别为各探元在CMOS相机下的指向角;$R_{CAM}^{BOD}$ 为足印相机到卫星本体坐标系的旋转矩阵;$\left( {pitch,roll,yaw} \right)$ 为足印相机的姿态角;$R_{BOD}^{ICRF}$ 为卫星本体系到天球参考框架(Celestial Reference Frame, ICRF)坐标系的旋转矩阵;$R_{ICRF}^{ITRF}$ 为ICRF坐标系到国际地球参考框架(International Terrestrial Reference Framework, ITRF)的旋转矩阵;$\lambda $ 为尺度因子,常量;${\left[ {\begin{array}{*{20}{c}} {{{\rm{X}}_s}}&{{Y_s}}&{{Z_s}} \end{array}} \right]^{\rm{T}}}$ 为投影中心在ITRF坐标系下的坐标。上述单片足印影像解算出的激光足印地面质心位置精度取决于地面参考DSM和足印本身定位精度。为了提高其精度,将公式(2)作为足印相机几何射线方程,并与该足印影像区域高精度DSM数据进行相交,确定激光足印地面最优位置。如图3所示,以初始激光足印地面点
${p_0}$ 对应DSM高程为第一层高程面,与足印相机射线相交得到${p_1}$ 平面位置,并内插DSM的高程作为第二层高程面,继续迭代计算,直至平面位置变化小于阈值时,得到的地面位置为激光足印地面最优位置。将该位置坐标代入公式(1),解算出星载激光最优指向[9]。
图 3 基于单片足印影像的星载激光几何检校示意图
Figure 3. Geometric calibration diagram of spaceborne laser based on single footprint image
-
地面红外探测器可直接捕获激光足印并触发,将能量强度转换为DN值,用于判断激光足印形状,如图4 (a)所示为GF-7外业检校时触发的探测器。根据触发后的探测器以及地面探测器位置计算出激光足印地面最优位置。

图 4 基于触发探测器的星载激光几何检校示意图。(a) GF-7触发的地面探测器实物图;(b) GF-7波束1拟合后的光斑;(c) GF-7波束2拟合后的光斑
Figure 4. Geometric calibration diagram of spaceborne laser based on triggered ground detector. (a) Physical drawing of detectors triggered by GF-7; (b) Spot of GF-7 beam 1 after fitting; (c) Spot of GF-7 beam 2 after fitting
该方法主要步骤为:
(1)激光足印地面位置预报
卫星过境前,对卫星轨道、姿态数据进行预报,结合星载激光安装指向,通过星载激光足印严密几何预报模型,预估检校场内激光脚点平面坐标[12]。以预估的激光脚点平面位置为中心,按等间隔布设足够范围的地面红外探测器。
(2)基于触发探测器的激光指向解算
卫星过境后,利用实时动态(Real - time Kinematic, RTK )实地测得每个触发后的探测器地面坐标,并记录其触发显示的DN值,DN值与激光光斑内能量成正相关,光斑越靠近中心,能量越高,对应探测器显示的DN值越大。鉴于激光光斑空间呈三维高斯分布[14],故采用高斯曲面方程对触发的探测器进行拟合,高斯曲面拟合方程如下:
$$f(x,y) = \exp \left( { - \frac{{{{\left( {x - {x_0}} \right)}^2}}}{{2\sigma _x^2}} - \frac{{{{\left( {y - {y_0}} \right)}^2}}}{{2\sigma _y^2}}} \right)$$ (3) 式中:
$f(x,y)$ 为每个探测器的DN值;$({x_0},{y_0})$ 为待求激光光斑质心地面坐标;$(x,y)$ 为每个探测器地面坐标;$A$ 为高斯曲面峰值;${\sigma _x},{\sigma _y}$ 分别为高斯曲面对应椭圆的长短半轴。如图4 (b)和(c)分别为拟合后的GF-7波束1与波束2的光斑,对触发的地面探测器曲面拟合后,一般认为高斯曲面中心点
$({x_0},{y_0})$ 为地面探测器的最优位置,并通过实测高斯曲面中心的高程得到三维坐标,将该三维坐标代入公式(1)中,即可解算出星载激光指向与测距系统偏差。 -
文章从卫星激光原始数据入手,系统性地介绍了星载激光测高仪3种不同检校方法与精度验证流程,具体如图5所示。
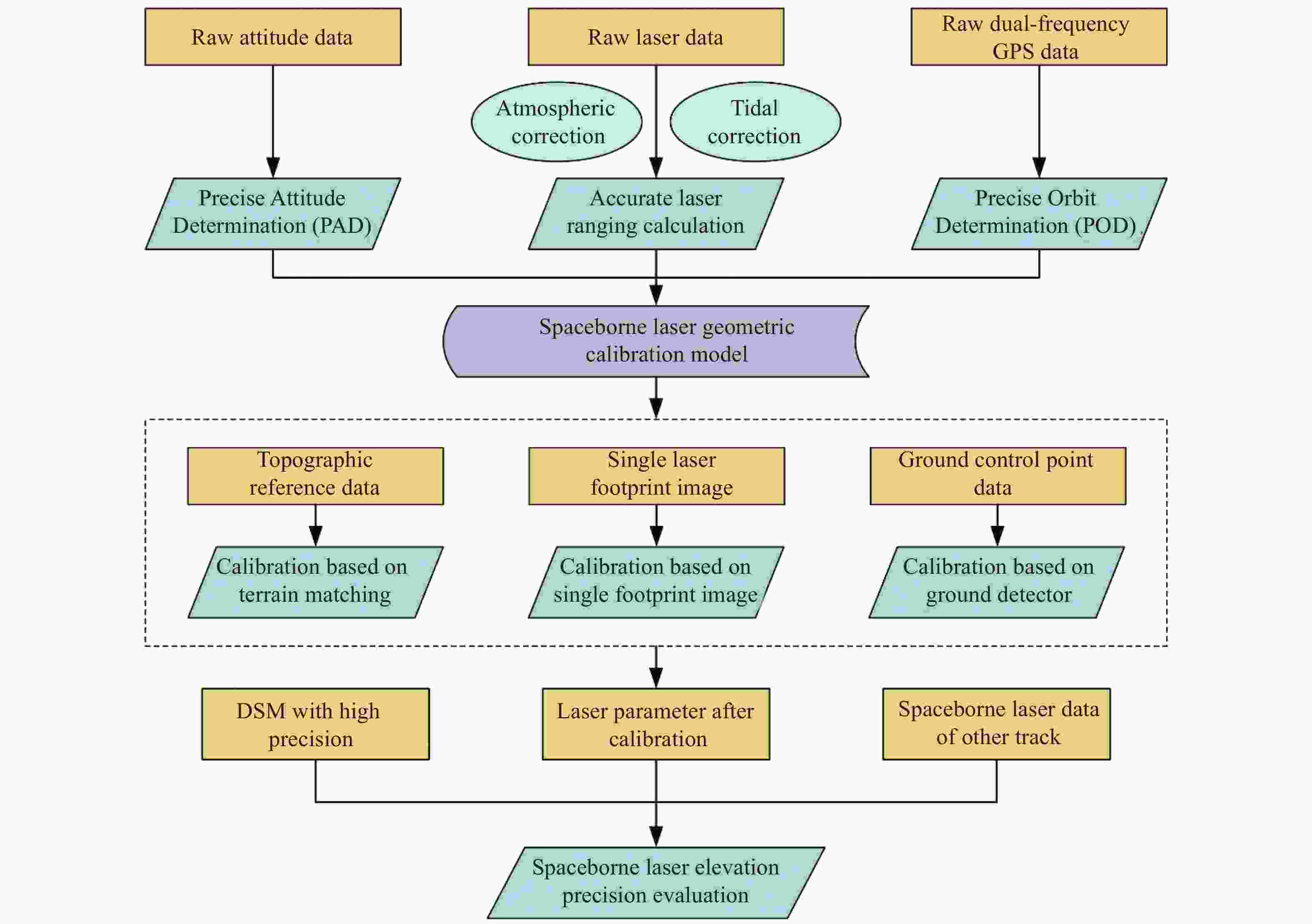
图 5 试验流程图
Figure 5. Test flow chart
文中试验主要流程如下:
(1)激光测距计算与改正
对于全波形激光数据,首先利用星载激光发射与回波波形确定激光渡越时间,并计算粗测距值[15-16]。
利用美国国家环境预报中心(National Centers for Environmental Prediction, NECP )数据以及国内气象站内插激光脚点上空大气参数,计算大气引起的测距误差[17-18],即大气改正。
最后利用固体潮改正模型以及全球海潮模型实现对激光脚点位置的潮汐进行改正,其中包括固体潮、海潮、极潮以及海潮负荷潮[19-20]。利用粗测距值消除大气以及潮汐引起的误差,即可得到较为精确的激光测距值。
(2)精密定姿(Precise Attitude Determination, PAD)
利用卫星在轨期间下传的星图、原始星敏陀螺数据,通过地面算法进行高精度联合姿态处理,获取高精度事后姿态数据[21-22]。高精度事后定姿算法的滤波算法为实时算法,可根据星敏测量精度实时进行滤波系数的调整,从而提高了定姿的时效性以及对噪声的抑制能力。
(3)精密定轨(Precise Orbit Determination, POD)
利用GF-7卫星下传的双频GPS原始观测数据,采用了快速精密星历和钟差产品,根据简化动力学模型,实现地面事后精密处理,得到精密轨道数据[23]。
(4)星载激光测高仪在轨几何检校
基于地形匹配的检校:以DSM数据作为地形参考数据,计算每个格网指向角条件下,激光与参考地形的高程残差,通过拟合残差曲面计算出最优指向角。
基于足印影像的检校:将利用足印影像提取的激光光斑质心带入足印影像几何定位模型计算首个激光足印地面位置,随后借助高精度地形数据不断优化激光足印位置,将最优足印位置带入星载激光几何检校模型计算出激光指向角。
基于地面探测器的检校:通过在地面布设红外探测器,并依赖触发后的探测器找到光斑质心位置,基于该位置坐标与星载激光几何检校模型直接解算出激光指向角。
(5)检校精度评估
选取其他轨激光数据作为验证数据,基于3种方法检校后指向角,分别计算试验区内激光点地面坐标。以地面高精度DSM数据作为验证数据,计算激光与控制点的高程差,分别验证3类方法的检校精度,并评估GF-7星载激光测高精度。
-
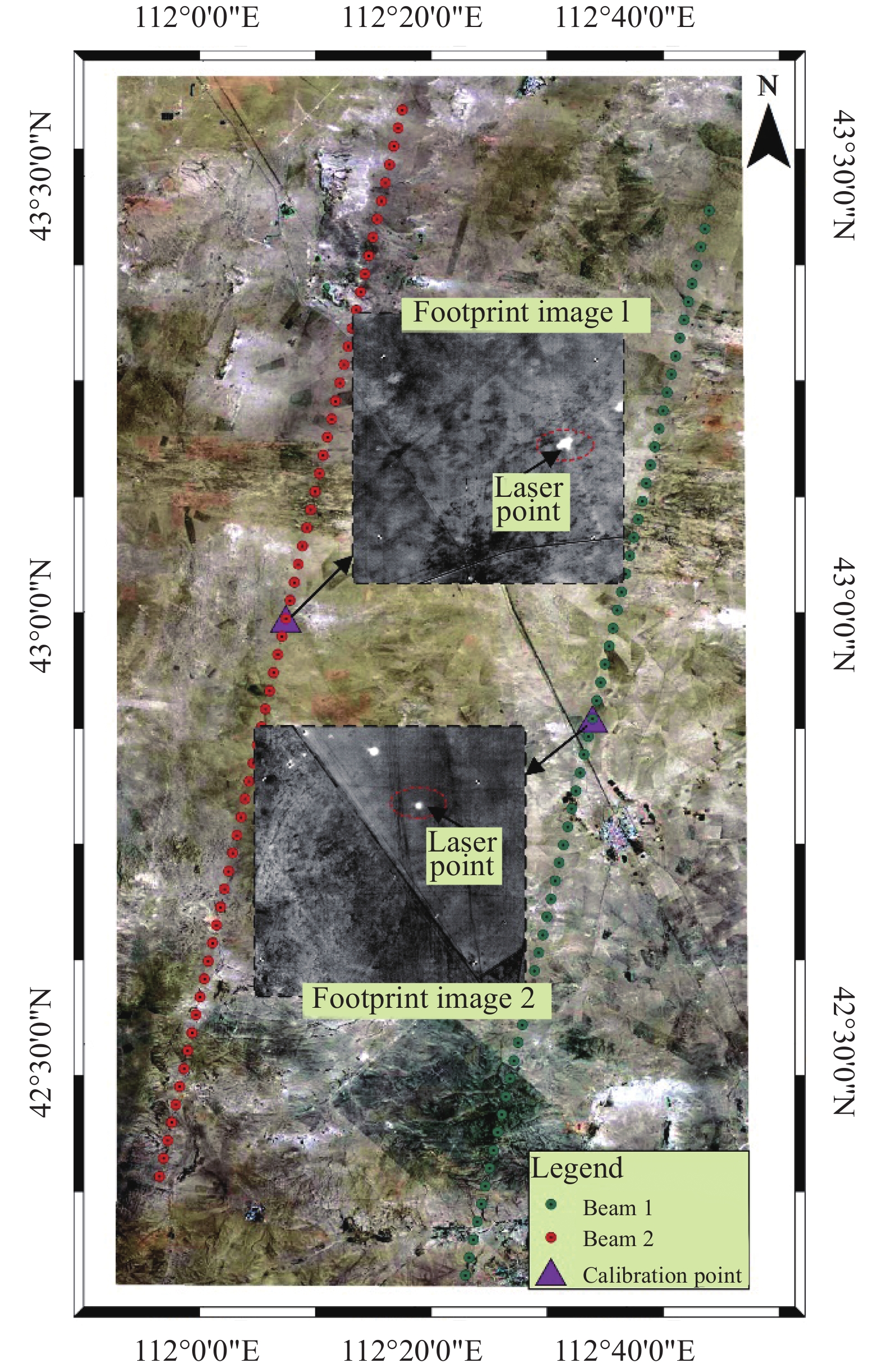
由于天气、地形起伏以及交通等因素均会影响星载激光测高仪在轨几何检校的成功与精度,综合考虑这些因素后,检校试验区域选择在内蒙古苏尼特右旗周边的平坦草地。该区域局部地形较为平坦、地表无地物遮挡,天气干燥、常年晴朗,场地开阔、交通便利,便于星载激光测高仪开展相应试验。为了更精确地对比文中3种方法的检校精度,选用的GF-7激光检校数据尽量保证为同一轨。GF-7波束1选用2020年6月14日第3402轨,由于该轨激光波束2足印影像无效,波束2选用2020年6月19日GF-7卫星第3478轨作为检校激光数据,检校试验区域与检校激光数据分布如图6所示。

图 6 文中检校试验数据
Figure 6. Calibration data in this paper
基于单片足印影像的检校与基于地面红外探测器的检校选取同一GF-7激光点,如图6三角形图标所示。其中基于单片足印影像检校时选用的地形数据为ALOS全球数字表面模型(ALOS Global Digital Surface Model “ALOS World 3D - 30m” , AW3D30),对应的GF-7 2个波束足印影像如图6中间框出的黑白影像。基于地形匹配的检校,以波束1与波束2外业检校点为中心,南北方向各选了30个激光点,即波束1与波束2各选取60个激光点进行地形匹配检校试验。由于基于地形匹配试验使用的长条带的地形需要存在一定的坡度,而内蒙古该试验区域内,笔者所在课题组仅有AW3D30参考地形数据,故而试验所选的参考地形数据为AW3D30,高程精度优于5 m[24]。
-
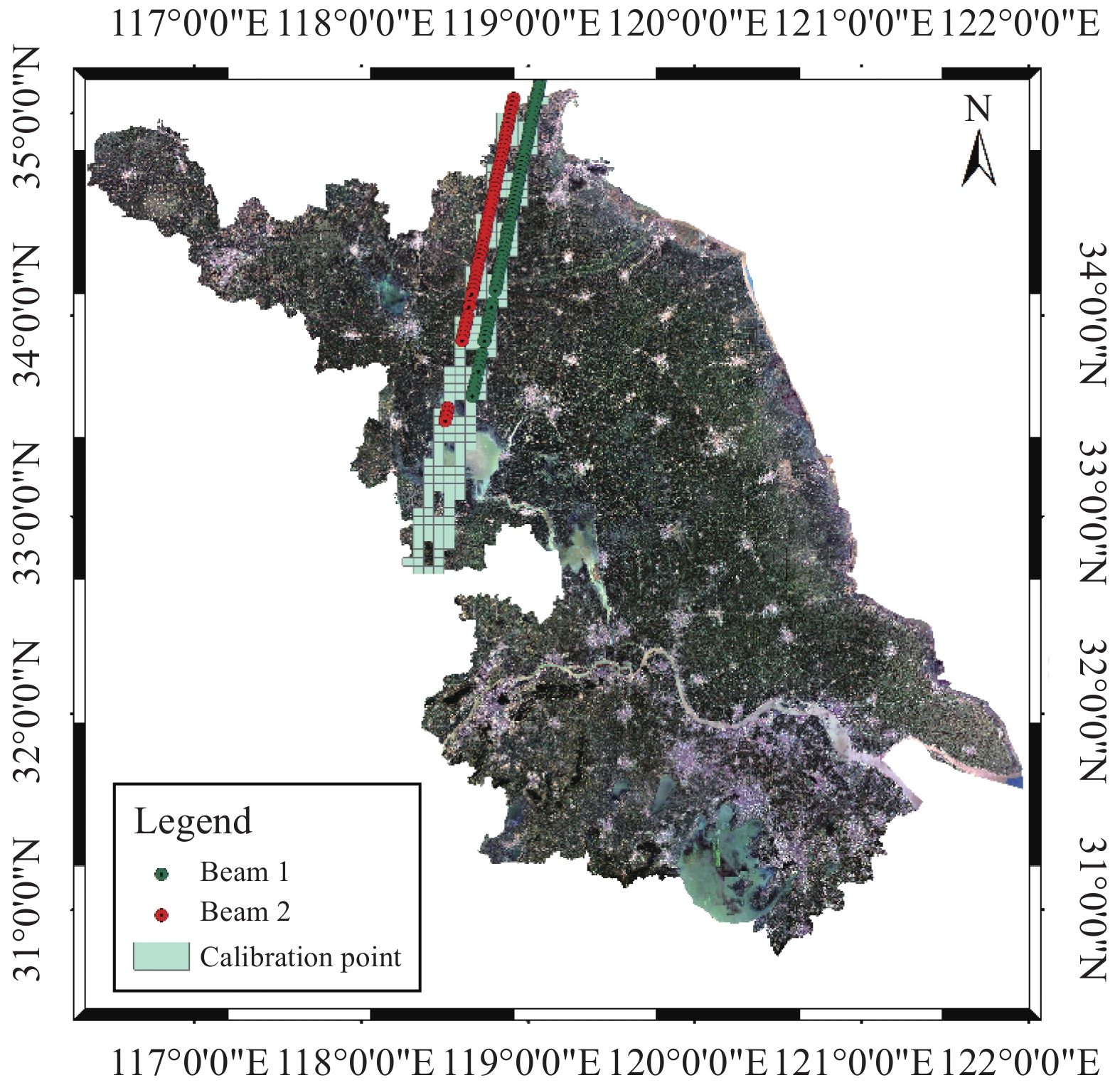
为了验证检校后激光测高精度,文中将外推至其他轨激光进行精度分析。选取2019年12月17日GF-7星载激光过江苏省地区的第672轨激光数据为激光精度验证数据,如图7所示。受天气影响,图7中江苏境内该轨南部无回波信号,剔除无效点后,该轨在江苏境内波束1有效激光点共计45个,波束2有效激光点共计57个。考虑GF-7星载激光测高仪检校后高程精度相对较高,因此文中选择高精度的机载雷达点云数据作为精度验证参考地形数据,如图7所示浅蓝色矩形条。该数据面积约为4862 km2,其高程精度优于0.1 m。
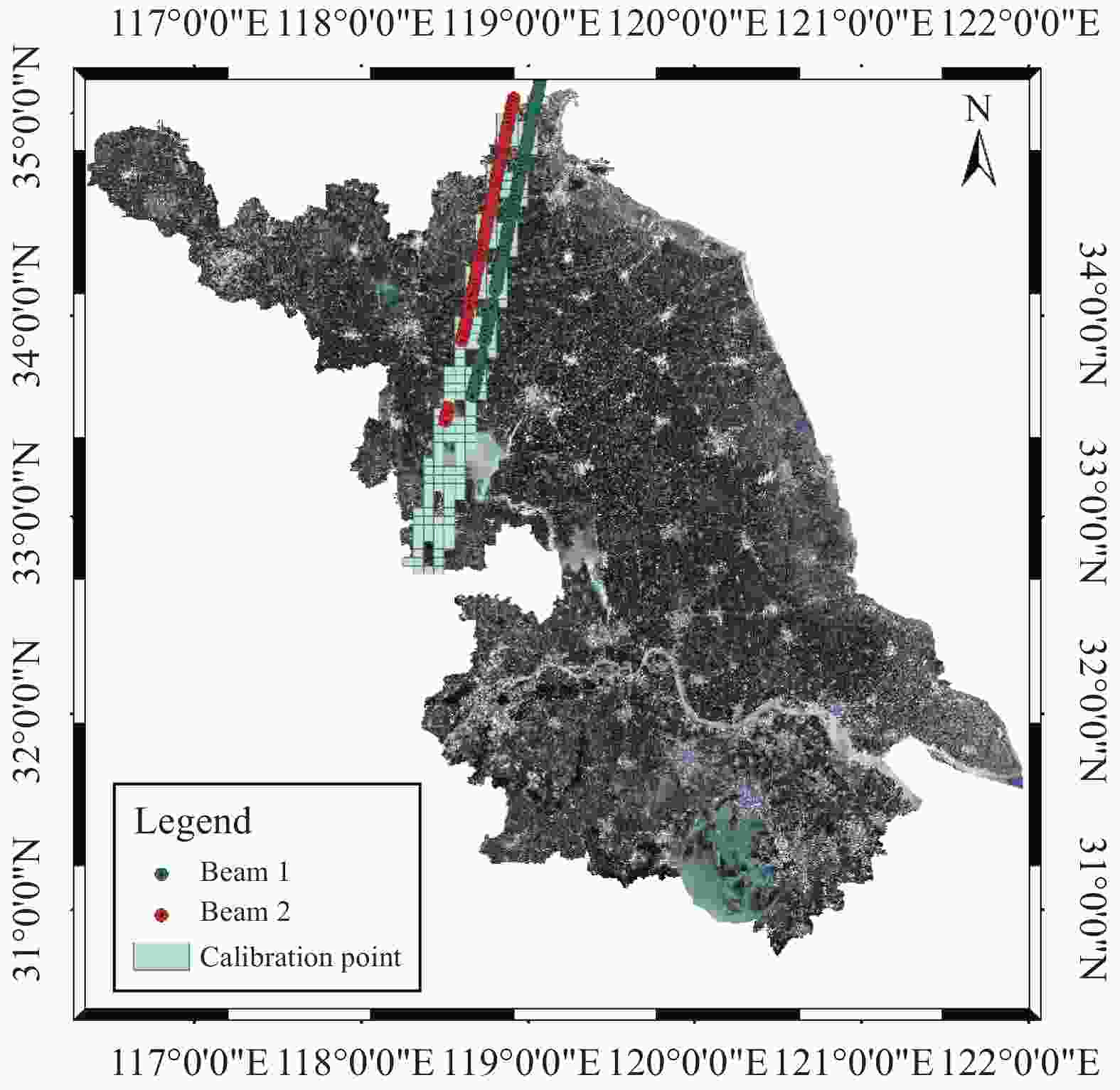
图 7 GF-7星载激光精度验证数据
Figure 7. Accuracy verification data of GF-7 spaceborne laser
-
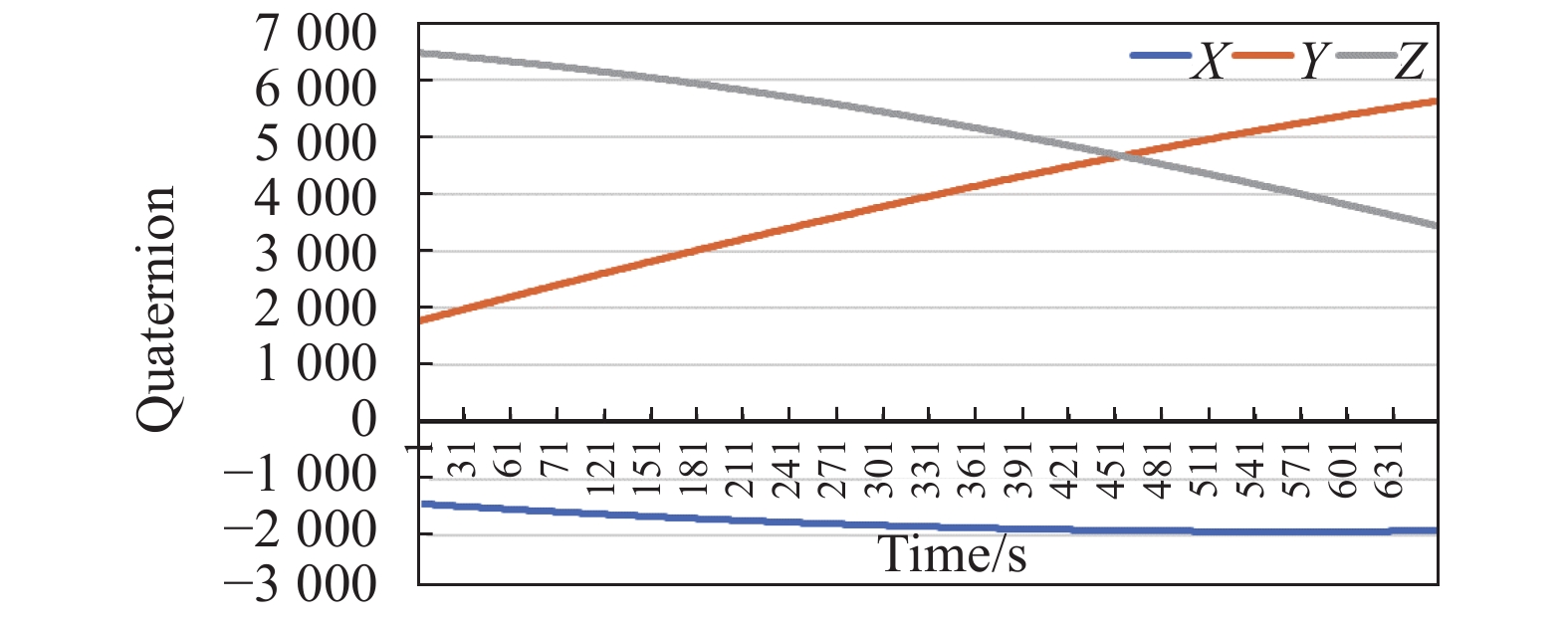
根据试验流程,2020年6月14日与19日在卫星过境内检校区域后,利用卫星下传的原始星敏、陀螺数据经事后精密定姿处理后计算出卫星精密姿态数据。利用GPS原始观测数据,结合快速精密星历和钟差解算出卫星精密轨道数据。6月14日检校时间段内的精密定姿与精密定轨结果数据,如图8、图9所示。6月19日定姿定轨结果这里不一一给出。

图 8 GF-7卫星精密姿态数据
Figure 8. Precise attitude data of GF-7 satellite
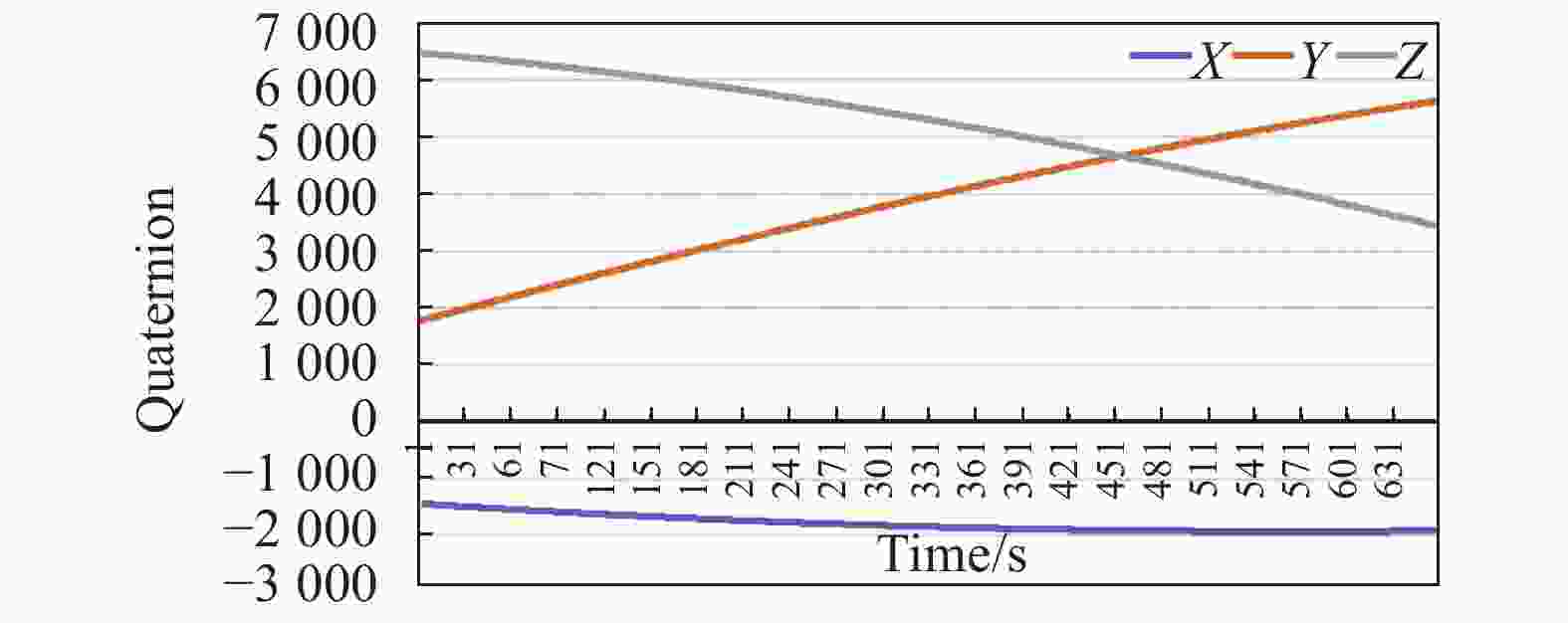
图 9 GF-7卫星精密轨道数据
Figure 9. Precise track data of GF-7 satellite
试验利用NECP 0.25°格网数据与国内气象站数据(
http://data.cma.gov.cn/ ),联合内插GF-7激光检校点地面该时刻气压与可降水量数据,根据该数据计算出大气引起的星载激光测距延迟改正量,改正量结果如表1所示。表 1 GF-7检校激光点的大气改正量
Table 1. Atmospheric correction of GF-7 calibration laser point
Laser point 203600254.00 204032175.67 Pressure/Pa 90082.33 89454.00 Precipitable water/mm 7.4300 15.1200 Dry delay/m 2.034 2.0200 Wet delay/m 0.0006 0.0012 Total delay/m 2.0340 2.0210 根据检校激光点地面坐标以及激光出光时刻,结合2014版全球海潮模型(Finite Element Solution 2014, FES2014 )以及固体潮改正模型,计算激光脚点处潮汐改正值。检校激光点各类潮汐对激光测距影响的改正量如表2所示。
表 2 GF-7检校激光点的潮汐改正量
Table 2. Tidal correction of GF-7 calibration laser point
Laser point 203600254.00 204032175.67 Solid tide/m 0.0133 0.2257 Pole tide/m −0.0057 −0.0058 Sea tide/m 0.0000 0.0000 Wet delay/m 0.0010 0.0018 Total delay/m 0.0086 0.2217 基于上述计算的各项改正量以及精密姿态、轨道数据,分别利用文中3种检校方法对GF-7星载激光2个波束进行检校。基于地形匹配检校(Terrain matching Calibration, TMC)以原始指向为中心,上下各取了0.1°作为指向角范围,并划分为间隔为0.0001°的格网,利用AW3D30作为参考地形计算激光点高程差值残差,从而计算出GF-7波束1与波束2的最优指向。基于单片激光足印影像检校(Single Laser Footprint Image Calibration, SLFIC)通过分别提取图6中足印影像上的激光光斑质心,利用AW3D30 30 m格网影像不断迭代计算出激光脚点最优位置,并根据公式(1)计算出2个波束指向角。基于地面探测器检校(Ground Detector Calibration, GDC),直接利用触发后的地面探测器得到光斑准确质心坐标,并代入公式(1)完成GF-7激光两波束检校。最后计算3种检校方法计算的指向角与原始指向角的差值,得到它们与原始指向偏差如表3所示。
表 3 3类检校方法检校后GF-7激光指向偏差
Table 3. Three kinds of calibration methods to calibrate GF-7 laser pointing deviation
Calibration method Beam 1 Beam 2 ${\rm d}\alpha$/(°) ${\rm d}\beta$/(°) ${\rm d}\alpha$/(°) ${\rm d}\beta$/(°) TMC 0.0300 −0.0400 0.1080 −0.0460 SLFIC 0.0310 −0.0368 0.1081 −0.0441 GDC 0.0304 −0.0378 0.1073 −0.0445 -
为了验证文中试验所用3种检校方法外推的精度以及它们间精度差异,分别利用3种方法检校后的指向解算GF-7第672轨激光地面坐标,并挑选出该轨过江苏地区的激光点与高精度机载雷达数据进行高程验证。当激光点落在建筑物或者植被地形上,会导致回波波形出现多峰值现象,根据波形的回波情况发现该轨中存在部分激光点落在城区建筑物以及植被上[25]。验证GF-7激光在平地地形测高精度时,仅保留激光回波波形为单峰值的激光点,剔除多波峰回波波形的激光点。剔除这些点后,波束1剩34个激光点,波束2剩44个激光点。分别计算这78个激光点在3种检校结果下的高程与机载雷达数据的高程差值,得到结果分别如图10、图11所示。
显然从上述结果可以看出,基于地面探测器的检校方法精度远远高于另外2种检校方法,基于单片足印影像检校方法精度略高于地形匹配检校方法。且后2种检校方法均存在明显的系统误差,分析其原因是这2种方法都只能修正星载激光的指向误差,未修正其系统测距误差。从误差随机性看,基于地面探测器检校方法检校后精度更加稳定,地形匹配检校结果波动较大,且在个别激光点存在较大的跳跃。主要是因为基于地形匹配检校受参考地形精度影响较大,AW3D30精度较低,导致激光指向还存在较小的误差,该误差会引起激光足印平面位置的偏移,当激光足印地面附近存在较大起伏时,直接导致了该指向下激光脚点高程与实际高程发生大的差异,产生了上图中偏差较大值。
为了更好地量化分析上述3类检校方法的精度,分别计算了波束1的34个激光点、波束2的44个激光点与雷达高程差的均值(Mean Value)和均方根误差(Root Mean Square Error, RMSE),结果如表4所示。
表 4 3类检校方法精度
Table 4. Accuracy of three calibration methods
Calibration
methodBeam 1 Beam 2 Mean value/m RMSE/m Mean value/m RMSE/m TMC −0.764 0.363 −0.866 0.722 SLFIC −0.673 0.196 −0.702 0.605 GDC 0.034 0.177 −0.022 0.157 上述图表结果显示,表4的结果与图10和图11一致,无论是波束1还是波束2,基于地面探测器检校精度高于单片足印影像检校精度,高于地形匹配检校。由于基于地形匹配和单片足印影像检校方法未修正测距误差,这里仅采用RMSE进行3种方法精度的比较。对于平地地形,其中地面探测器检校波束1精度为0.177 m,波束2为0.157 m;单片足印影像检校波束1精度为0.196 m,波束2为0.605 m;地形匹配检校波束1精度为0.363 m,波束2为0.722 m。综上,基于地面探测器检校在平地地形精度优于0.2 m;另外2种检校方法精度均优于0.8 m,其中GF-7波束1精度优于0.4 m,波束2优于0.8 m。

图 10 3种检校方法下第672轨波束1激光高程精度
Figure 10. The 672th track beam 1 laser elevation precision under three kinds of calibration method
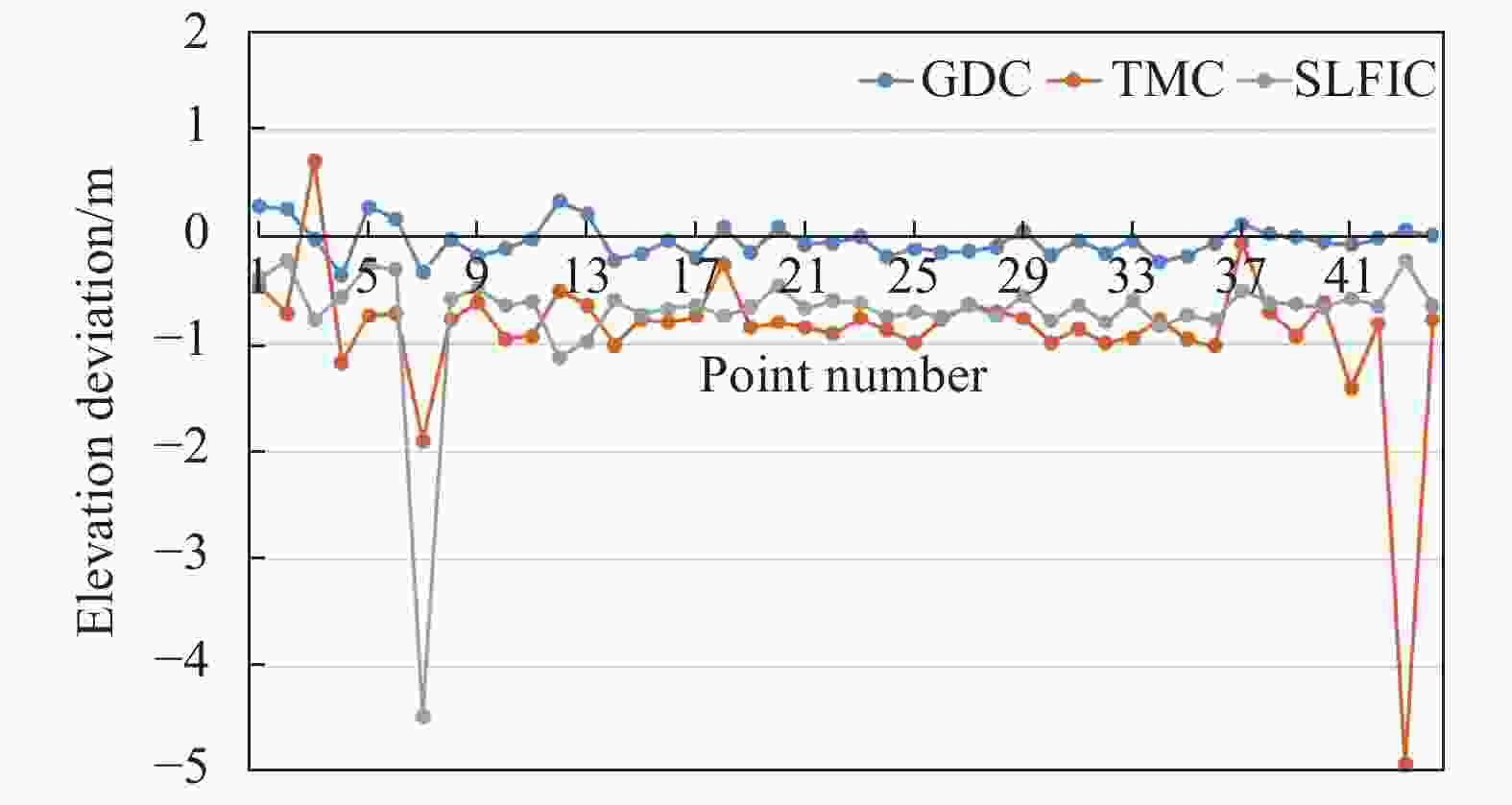
图 11 3种检校方法下第672轨波束2激光高程精度
Figure 11. The 672th track beam 2 laser elevation precision under three kinds of calibration method
从基于单片足印影像检校结果与地形匹配检校结果来看,无论是波束1还是波束2均存在一定系统误差,但前者系统误差小于后者。系统误差由测距与指向误差同时决定,上述两者虽然均未进行测距修正,但两者的指向精度存在一定差异。对于地形匹配的检校,检校精度主要受参考地形数据精度的影响,文中采用的AW3D30 高程精度为5 m,带来了较大检校的误差。然而对于单片足印影像检校,检校精度由足印影像自身几何误差、足印影像上光斑质心提取误差以及高程地形数据的精度决定。文中基于单片足印影像检校虽然所使用的地形数据也为AW3D30,但足印影像已经过几何标定,总体误差较小,故而该方法检校精度高于地形匹配检校精度,即该方法带来的高程系统误差亦小于地形匹配检校。
-
文中以我国首台正式用于对地观测的GF-7星载激光测高仪为试验对象,系统阐述了3种星载激光测高仪几何检校方法。针对同一轨GF-7激光数据,开展了基于地面探测器、单片足印影像、地形匹配3种检校方法的试验,将3种不同检校方法结果外推至其他同一轨激光数据,并利用高精度机载雷达进行高程精度验证,得到结论如下:
(1)基于地面红外探测器检校结果的精度最高,检校后平地地形GF-7波束1精度为0.177 m,波束2为0.157 m,均优于0.2 m。
(2)以AW3D30 为参考地形,基于单片足印影像检校精度高于地形匹配检校精度,检校后前者GF-7波束1精度为0.196 m,波束2为0.605 m;后者波束1精度为0.363 m,波束2为0.722 m。但是两者均未检校激光测距系统误差。
综上,文中对比了3种GF-7星载激光测高仪检校方法,其中基于地面探测器检校方法精度是最可靠的,可作为星载激光测高仪主要检校方法。如有高精度DSM数据,基于单片足印影像和地形匹配检校精度还可进一步提高。
In-orbit geometric calibration and accuracy evaluation of GaoFen-7 spaceborne laser altimeter
-
摘要: 高分七号卫星(GaoFen-7, GF-7)搭载了我国首台正式用于对地观测的星载激光测高仪,其测高精度备受国内外关注。文中系统性介绍了基于地形匹配、单片足印影像以及地面探测器阵列的3种检校方法,并利用同一地区GF-7星载激光数据,分别进行不同检校试验与验证,对比和分析3种不同检校试验后GF-7星载激光测高仪的高程测量精度。结果表明,基于地面探测器阵列的检校方法精度最高。以高精度机载LiDAR点云作为地面验证数据,GF-7星载激光测高仪经检校后波束1精度达到0.177 m,波束2为0.157 m;受限于检校所用的参考数据精度不足,其他2种检校方法精度相对较低,测高精度达到0.8 m。Abstract: The GaoFen-7 satellite (GF-7) is equipped with China’s first spaceborne laser altimeter, which is officially used for earth observation, then its measurement accuracy of surface elevation has attracted much attention at home and abroad. Three calibration methods for spaceborne laser altimeter: the terrain matching calibration method, the single laser footprint image calibration method, and the ground detector array calibration method were introduced systematically. The above calibration methods of spaceborne laser altimeter were also used to carry out calibration test for GF-7 spaceborne laser altimeter with the same set of data. After laser calibration, the elevation measurement accuracy of GF-7 spaceborne laser altimeter was evaluated and analyzed under the results of three calibration methods. The airborne LiDAR point cloud data was employed for accuracy verification. The results show that the spaceborne laser altimeter calibration method based on ground detector array has the highest accuracy, which spaceborne laser elevation measurement accuracy of GF-7 laser beam 1 is 0.177 m, and the laser beam 2 is 0.157 m. Limited by the elevation accuracy of the reference topography data for spaceborne laser altimeter calibration, the elevation measurement accuracy of the other two spaceborne laser calibration methods is relatively low, which can just achieve 0.8 m.
-
图 1 GF-7星载激光测高系统对地观测示意图
Figure 1. Earth observation diagram of GF-7 spaceborne laser altimetry system
图 2 基于地形匹配的星载激光几何检校示意图
Figure 2. Geometric calibration diagram of spaceborne laser based on terrain matching
图 3 基于单片足印影像的星载激光几何检校示意图
Figure 3. Geometric calibration diagram of spaceborne laser based on single footprint image
图 4 基于触发探测器的星载激光几何检校示意图。(a) GF-7触发的地面探测器实物图;(b) GF-7波束1拟合后的光斑;(c) GF-7波束2拟合后的光斑
Figure 4. Geometric calibration diagram of spaceborne laser based on triggered ground detector. (a) Physical drawing of detectors triggered by GF-7; (b) Spot of GF-7 beam 1 after fitting; (c) Spot of GF-7 beam 2 after fitting
图 10 3种检校方法下第672轨波束1激光高程精度
Figure 10. The 672th track beam 1 laser elevation precision under three kinds of calibration method
图 11 3种检校方法下第672轨波束2激光高程精度
Figure 11. The 672th track beam 2 laser elevation precision under three kinds of calibration method
表 1 GF-7检校激光点的大气改正量
Table 1. Atmospheric correction of GF-7 calibration laser point
Laser point 203600254.00 204032175.67 Pressure/Pa 90082.33 89454.00 Precipitable water/mm 7.4300 15.1200 Dry delay/m 2.034 2.0200 Wet delay/m 0.0006 0.0012 Total delay/m 2.0340 2.0210  下载: 导出CSV
下载: 导出CSV
表 2 GF-7检校激光点的潮汐改正量
Table 2. Tidal correction of GF-7 calibration laser point
Laser point 203600254.00 204032175.67 Solid tide/m 0.0133 0.2257 Pole tide/m −0.0057 −0.0058 Sea tide/m 0.0000 0.0000 Wet delay/m 0.0010 0.0018 Total delay/m 0.0086 0.2217
下载: 导出CSV
表 3 3类检校方法检校后GF-7激光指向偏差
Table 3. Three kinds of calibration methods to calibrate GF-7 laser pointing deviation
Calibration method Beam 1 Beam 2 ${\rm d}\alpha$ /(°)${\rm d}\beta$ /(°)${\rm d}\alpha$ /(°)${\rm d}\beta$ /(°)TMC 0.0300 −0.0400 0.1080 −0.0460 SLFIC 0.0310 −0.0368 0.1081 −0.0441 GDC 0.0304 −0.0378 0.1073 −0.0445
下载: 导出CSV
表 4 3类检校方法精度
Table 4. Accuracy of three calibration methods
Calibration
methodBeam 1 Beam 2 Mean value/m RMSE/m Mean value/m RMSE/m TMC −0.764 0.363 −0.866 0.722 SLFIC −0.673 0.196 −0.702 0.605 GDC 0.034 0.177 −0.022 0.157
下载: 导出CSV
-
[1] Tang X, Xie J, Liu R, et al. Overview of the GF-7 laser altimeter system mission [J]. Earth and Space Science, 2019, 6(11): 1-11. [2] Xie Junfeng , Huang Genghua, Liu Ren, et al. Design and data processing of china's first spaceborne laser altimeter system for earth observation: GaoFen-7 [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2020, 13: 1034-1044. doi: 10.1109/JSTARS.2020.2977935 [3] Tang Xinming, Xie Junfeng, Fu Xinke, et al. ZY3-02 laser altimeter on-orbit geometrical calibration and test [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(6): 714-723. (in Chinese) doi: 10.11947/j.AGCS.2017.20160597 [4] Magruder L, Silverberg E, Webb C, et al. In situ timing and pointing verification of the ICESat altimeter using a ground‐based system [J]. Geophysical Research Letters, 2005, 322(21): 365-370. [5] Tang X, Xie J, Gao X, et al. The in-orbit calibration method based on terrain matching with pyramid-search for the spaceborne laser altimeter [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(3): 1053-1062. doi: 10.1109/JSTARS.2018.2890552 [6] Luthcke S B, Rowlands D D, Mccarthy J J, et al. Spaceborne laser-altimeter-pointing bias calibration from range residual analysis [J]. Journal of Spacecraft & Rockets, 2000, 37(3): 374-384. [7] Magruder L A, Ricklefs R L, Silverberg E C, et al. ICESat geolocation validation using airborne photography [J]. IEEE Transactions on Geoscience & Remote Sensing, 2010, 48(6): 2758-2766. [8] Han Ling, Tian Shiqiang, Xie Junfeng. Development status of calibration technique for space-borne laser altimeter [J]. Spacecraft Recovery & Remote Sensing, 2016, 37(6): 11-19. (in Chinese) doi: 10.3969/j.issn.1009-8518.2016.06.002 [9] Xie J, Liu R, Mo F, et al. Pointing bias calibration of GAOFEN-7 laser altimeter based on single laser footprint image [J]. ISPRS Ann Photogramm Remote Sens Spatial Inf Sci, 2020, V-2-2020: 113-119. doi: https://doi.org/10.5194/isprs-annals-V-2-2020-113-2020,2020 [10] 秦绪文, 张过. 航天摄影测量[M]. : 测绘出版社, 2013. Qin Xuwen, Zhang Guo. Space Photogrammetry[M]. Beijing: China Surveying and Mapping Press, 2013. (in Chinese) [11] Filin S. Calibration of spaceborne laser Altimeters-an algorithm and the site selection problem [J]. IEEE Transactions on Geoscience and Remote Sensing, 2006, 44(6): 1484-1492. doi: 10.1109/TGRS.2005.863295 [12] Tang Xinming, Xie Junfeng, Mo Fan, et al. Footprint location prediction method of ZY3-02 altimeter [J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(7): 866-873. (in Chinese) doi: 10.11947/j.AGCS.2017.20160639 [13] Yuan Xiaoqi, Li Guoyuan, Tang Xinming, et al. Centroid automatic extraction of spaceborne laser spot image [J]. Acta Geodaetica et Cartographica Sinica, 2018, 47(2): 135-141. (in Chinese) doi: 10.11947/j.AGCS.2018.20170517 [14] Liu Ren, Xie Junfeng, Mo Fan, et al. Waveform simulation of spaceborne laser altimeter echo based on fine terrain [J]. Acta Photonica Sinica, 2018, 47(11): 79-88. (in Chinese) [15] Song Jianhui, Yuan Feng, Ding Zhenliang. High precision time interval measurement in pulsed laser ranging [J]. Optics and Precision Engineering, 2009, 17(5): 110-114. (in Chinese) [16] Chen Lu, Gao Zhishan, Yuan Qun, et al. Ground calibration method for distance parameters of satellite-borne laser altimeter [J]. Chinese Optics, 2019, 12(4): 896-904. (in Chinese) doi: 10.3788/co.20191204.0896 [17] Zhang Wenhao, Li Song, Ma Yue, et, al. Improved method of atmospheric delay correction using China meteorological station data for a laser altimeter [J]. Infrared and Laser Engineering, 2018, 47(2): 0206004. (in Chinese) [18] Ma Yue, Li Song, Weng Yinkan, et al. Hydrostatic delay correction for satellite laser altimeter [J]. Infrared and Laser Engineering, 2013, 42(4): 909-914. (in Chinese) doi: 10.3969/j.issn.1007-2276.2013.04.013 [19] 李国元. 对地观测卫星激光测高数据处理方法与工程实践[D]. 武汉大学, 2017. Li Guoyuan. Earth observing satellite laser altimeter data processing method and engineer practice[D]. Wuhan: Wuhan University, 2017. (in Chinese) [20] Fricker H A, Ridgway J R, Minster J B, et al. The algorithm theoretical basis document for tidal corrections[R]. Maryland, US: NASA Goddard Space Flight Center, 2012. [21] Tang X, Junfeng X, Xiao W, et al. High-precision attitude post-processing and initial verification for the ZY-3 satellite [J]. Remote Sensing, 2014, 7(1): 111-134. doi: 10.3390/rs70100111 [22] Liang Bin, Zhu Hailong, Zhang Tao, et al. Research status and development tendency of star tracker technique [J]. Chinese Optics, 2016, 9(1): 16-29. (in Chinese) doi: 10.3788/co.20160901.0016 [23] Zhao Qile, Liu Jingnan, Ge Maorong. Research on precise orbit determination theory and software of GPS navigation constellation and LEO satellite [J]. Geomatics and Information Science of Wuhan University, 2005, 30(4): 375-375. (in Chinese) [24] Takaku J, Tadono T, Tsutsui K, et al. Validation of 'AW3D' global DSM generated from ALOS prism[C]//Vienna, Austria: ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, III-425-31. [25] Li Song, Zhou Hui, Shi Yan, et al. Theoretical model return signal of laser altimeter [J]. Optics and Precision Engineering, 2007, 15(1): 33-39. (in Chinese) doi: 10.3321/j.issn:1004-924X.2007.01.006 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 509
- HTML全文浏览量: 144
- PDF下载量: 59
- 被引次数: 0


















































