





-
离轴三反光学系统因无中心遮拦,易于实现大视场、长焦距、高分辨率和结构紧凑,被广泛应用于空间光学领域[1]。离轴三反光学系统一般含有长条形反射镜,使用推扫或摆扫的形式实现大视场成像。随着离轴三反光学系统的广泛应用,对长条形反射镜结构及支撑技术的研究也备受关注,大口径、轻量化和高面形精度成为空间反射镜的发展趋势与研究重点。
一直以来,大多研究都是围绕圆形空间反射镜,对长条形反射镜的设计缺少相关经验公式。李志来等[2]对口径为660 mm×300 mm的长条形反射镜的轻量化及支撑结构进行详细设计,反射镜在光轴方向的重力工况下面形PV值为28.9 nm,RMS值为7.6 nm。针对长条镜背部支撑点设置缺乏有效方法的问题,朱俊青等[3]采用参数化设计方法,确定了口径在200~1600 mm、长宽比在1~2.5之间的SiC反射镜支撑点最佳位置和最优径厚比。现阶段国外轻量化反射镜的面密度已可达到小于10 kg/m2,实现了超轻量化[4]。Gaia卫星上主反射镜口径为1500 mm×560 mm,采用反应烧结SiC材料,背部开放式的三角形轻量化结构,反射镜质量仅40 kg,面形精度RMS优于20 nm[5]。国内关于反射镜轻量化也进行了大量卓有成效的研究。翟岩等[6]设计了Ф776 mm的铍铝合金反射镜,轻量化率达到89.3%。相萌[7]对长条形反射镜采用拓扑优化方法实现轻量化设计,轻量化率达70.1%。李梦庆[8]对1200 mm×484 mm长条反射镜进行轻量化设计,轻量化率达75%。因为拓扑优化设计方法的发展及应用,反射镜的轻量化设计得以进一步发展,但是对于长条形反射镜的径厚比、支撑点数和支撑点位等仍然缺乏普遍适用的设计依据。
文中针对某700 mm×249 mm口径长条形空间反射镜研制任务,开展了反射镜及其支撑结构设计。重点研究反射镜支撑点数、支撑点位和支撑结构安装位置对反射镜面形精度的影响,以期为长条形空间反射镜的结构设计与优化提供相关参考和借鉴。所设计的长条形空间的设计指标要求反射镜面形精度PV≤63.3 nm、RMS≤12.6 nm;反射镜质量不超过10 kg,组件质量不得大于22 kg,组件基频不低于100 Hz。
-
目前,可用于空间反射镜的常用材料有熔石英、微晶玻璃、超低膨胀玻璃、铝、铍、硅、碳化硅以及铝基碳化硅复合材料等。反射镜材料的选择主要考虑其抵抗受力和受热变形的能力,因此需要综合考查材料的力学性能与热性能。一般通过比刚度(E/ρ)和导温系数(λ/α)分别表征材料的力、热性能,在材料比刚度与导热系数等权重的情况下,采用综合品质因子综合评判材料性能,材料的综合品质因子等于(E/ρ)×(λ/α)[9],常用反射镜材料的综合品质因子见表1。按照材料的综合品质因子评价,材料性能优劣依次为SiC、硅、铍、微晶玻璃、铝和熔石英。另外,材料的光学可加工性、成本以及购货渠道也是需要考虑的因素。综上考虑,选用RB-SiC作为反射镜基体材料,虽然SiC的密度与其他材料相比最大,与除铍之外的其余材料相比差距并不悬殊,但从另一角度对比发现SiC具有最高的弹性模量,综合考量,相对于其他几种材料,SiC具有很高的比刚度,这意味着制造相同的反射镜采用SiC材料可以更大程度地提高反射镜的轻量化率。
表 1 常用反射镜材料的性能和综合品质因数[9]
Table 1. Performance and quality factors of rational materials for mirror[9]
RB-SiC Si Be ULE Zerodur Al Fused silica Poisson’s ratio μ 0.2 0.278 0.08 0.17 0.24 0.33 0.17 Elastic modulus E/GPa 340 131 287 67 91 78 72 Density ρ/g·cm−3 3.05 2.33 1.85 2.21 2.53 2.68 2.19 Specific stiffness E/ρ/GN·m·g−1 111.50 56.22 155.14 30.32 35.97 29.10 32.88 Thermal conductivity λ/W·(m·K)−1 155 156 216 1.31 1.64 167 1.40 Thermal expansion coefficient α/10−6·K−1 2.50 2.60 11.40 0.03 0.05 23.6 0.50 Thermal stability λ/α/106 W·m−1 62 60 18.95 43.67 32.80 7.08 2.80 Integrated quality (E/ρ) · (λ/α) 6913 3373.2 2939.40 1324.07 1179.76 206.03 92.06 -
为降低发射成本、减小自重变形、提升反射镜抵抗变形的能力,对反射镜进行轻量化设计是必不可少的。反射镜的轻量化设计主要包括径厚比确定、反射面板厚度选择、轻量化孔形状、支撑方式的选择、支撑点数及支撑位置等。
-
Roberts[10]等研究圆饼形反射镜的径厚比与自重变形之间的关系,得出如下经验公式:
$$\delta = {\frac{{{\rm{3}}\rho {{g}}r}^4}{{16E{{{t_0}}^2}}}} = \frac{{3\rho g{{\left( {{D / {{t_0}}}} \right)}^2}{D^2}}}{{256E}}$$ (1) 式中:δ为最大自重变形;ρ为材料密度;g为重力加速度;r为圆盘半径,r=D/2;E为弹性模量;t0为圆盘厚度。经验公式是针对圆饼形反射镜给出的,对于长条形反射镜不能完全适用,所以仅以此经验公式作参考。按传统设计经验,SiC轻量化反射镜径厚比一般在6~13,按照直径700 mm,材料参数取自表1,最大变形63.3 nm,用公式(1)计算,初步确定实体圆盘反射镜厚度为60 mm。要设计背部开放式轻量化的反射镜,镜体厚度应在初始厚度基础上增加20%,所以暂定镜体厚度为72 mm,具体厚度应根据有限元分析结果做进一步调整。
-
按照以往经验,大口径反射镜一般采用背部支撑。文中的研究对象属于大口径长条形反射镜,故选用背部支撑方式。
确定支撑方式后支撑点数及点位是支撑方案设计的重点。空间反射镜的轻量化设计应尽量达到等刚度设计,因此在确定支撑方案时,应该先确定相同尺寸实体反射镜的支撑点数与位置。反射镜背部支撑点数与反射镜材料、口径和光学指标要求有直接关系。目前,反射镜背部支撑点数一般为3点、6点或9点支撑等。随着反射镜口径的增大以及光学指标要求的提高,支撑点数可随之增加而提高支撑刚度,降低反射镜的变形。但支撑点不是越多越好,应在保证支撑刚度足够的条件下,尽可能使用最少的支撑点数,以避免过定位,对安装造成困难。Hall[11]给出了圆形镜最少支撑点数的经验公式(2),对于长条形反射镜迄今尚无普遍适用的支撑点设置方法,一直以来设计人员都是参考圆形镜的经验公式得出支撑点数,再通过有限元方法修正。
$$N = \frac{{1.5{r^2}}}{t_0}\sqrt {\frac{{\rho g}}{{E\delta }}} $$ (2) 当反射镜重力变形小于63.3 nm时,据此公式计算得到Ф700 mm圆形SiC反射镜的最少支撑点数N=3.4,初步确定700 mm×249 mm长条镜采用3点背部支撑。
平板长条形反射镜自重下的最大变形与反射镜厚度以及支撑点数有如下关系[6]:
$$\delta = {\gamma _N} \times \frac{{12\rho g{A^2}\left( {1 - {\mu ^2}} \right)}}{{E{t_0^2}{N^2}}}$$ (3) 式中:γN为支撑效率系数,Nelson给出三点支撑效率为5.76×10−3[4];A为平板面积。文中研究的反射镜虽不是平板镜,但可据此公式检验反射镜厚度和支撑点数能否满足要求。计算得到自重最大变形为21.8 nm,满足最大变形要求,说明对700 mm×249 mm长条镜背部支撑点数量的估计合理且留有余量。
-
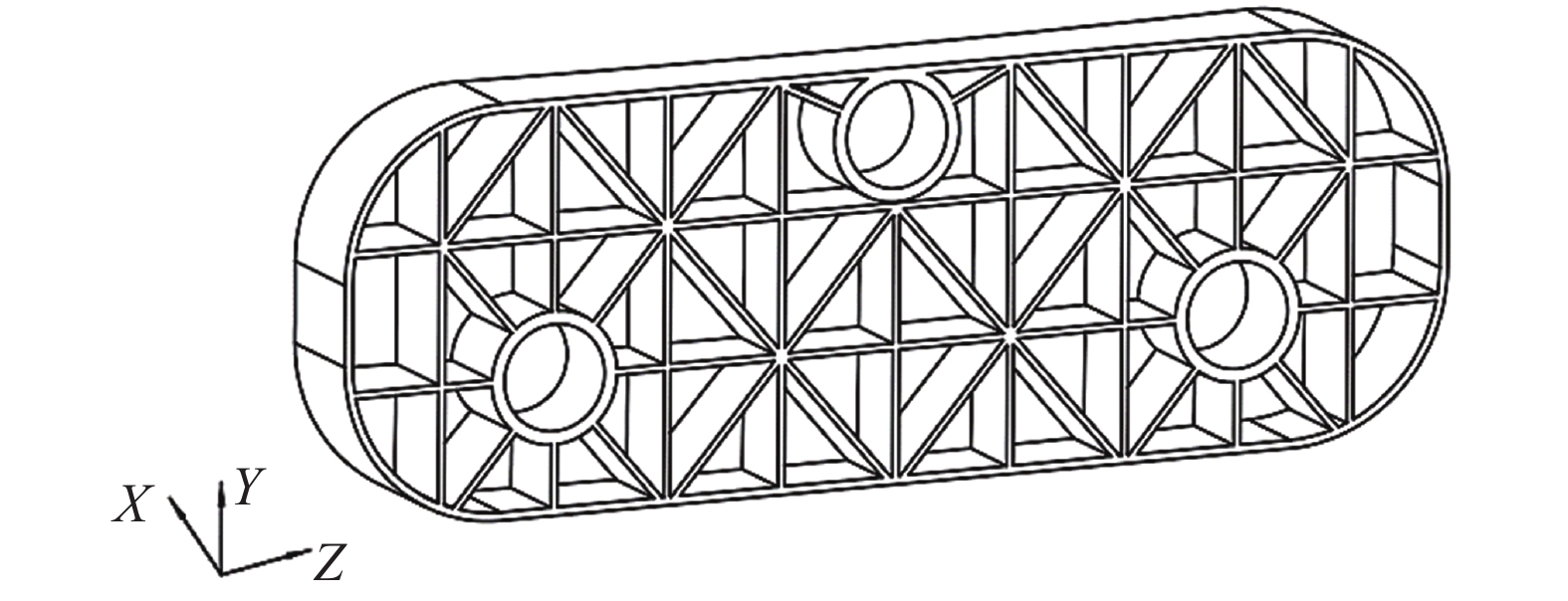
反射镜的轻量化孔有三角形、四边形、六边形和扇形等,三角形轻量化孔结构的轻量化率稍低,但刚度却最好。对于长宽比大于2.5的长条形反射镜,背部三点支撑的支撑点趋于一线,会引起支撑状态下热变形较大和谐振频率低等现象[4]。文中所设计的反射镜长宽比达到2.8,为提高轻量化镜的镜体刚度,采用三角形轻量化孔。轻量化孔的内切圆半径和高度分别与加工时作用在镜面的压力和自重引起的变形有关。根据Vukobratovich[12]给出的轻型反射镜在加工过程中单个蜂窝单元最大变形与镜面厚度的经验公式,再结合目前的RB-SiC成形工艺水平,确定镜面厚度为5 mm,轻量化孔筋板厚度为4 mm。轻量化后的反射镜镜重9.64 kg,轻量化率达到74.1%,反射镜轻量化模型如图1所示。
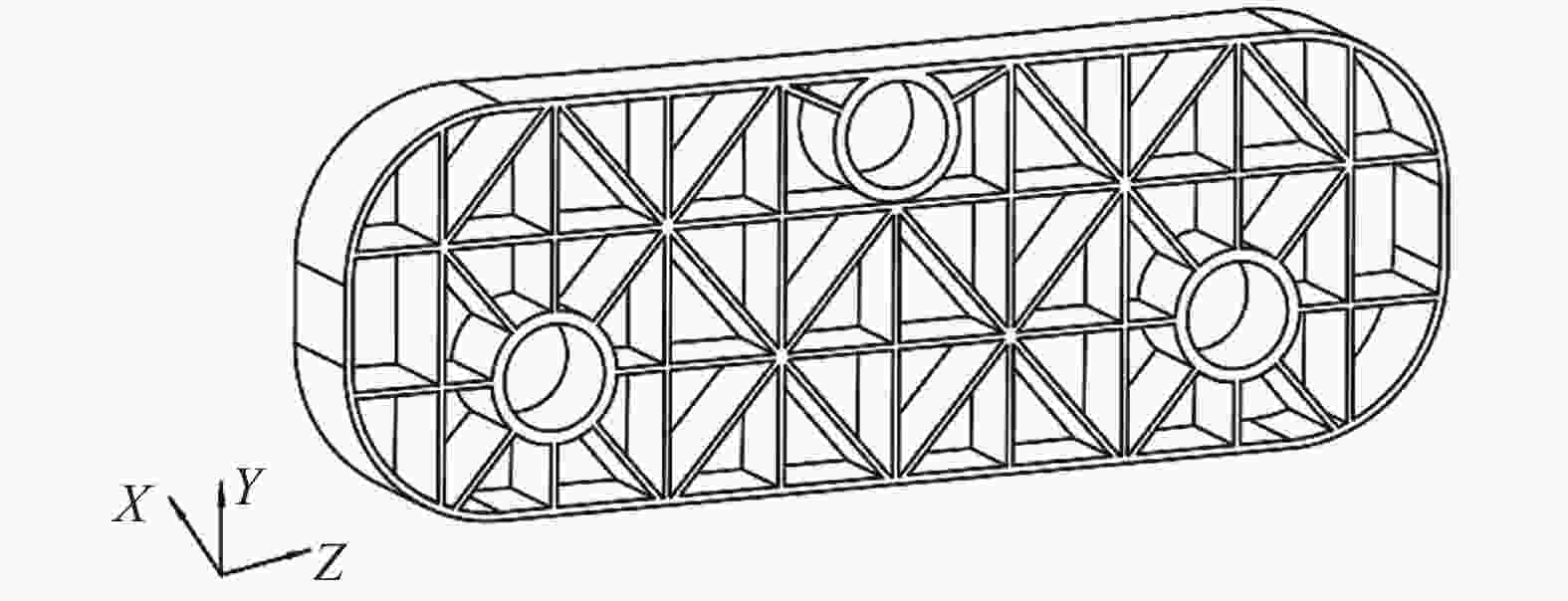
图 1 长条形反射镜轻量化结构
Figure 1. Light-weighting structure of rectangular mirror
-
目前,对于采用背部支撑方式的长条形反射镜,只能对某一确定尺寸的反射镜进行专门设计。背部支撑的核心就是每点尽量支撑相同的重量,并且每点支撑应该在其承受质量的质心位置上,避免产生倾覆力矩[13]。质量平均分配最简单的方式是沿长度方向分为三段设置支撑,然而这已被证明是不合理的,而且对于球面镜也难以达到绝对平均质量,所以三个支撑点只能是呈三角形布置。在长条镜的支撑点位置设计时,为保证反射镜的对称性且不产生附加力矩,三支撑点应沿反射镜长度方向呈等腰三角形分布,且还需要保证三角形的重心与反射镜的质心位置重合。
在轻量化反射镜支撑点位置设计时,具体步骤如下:
(1)依据设计经验确定实体镜支撑点初始位置,通过对反射镜水平放置时自重工况分析,确定支撑点最佳布置方式。
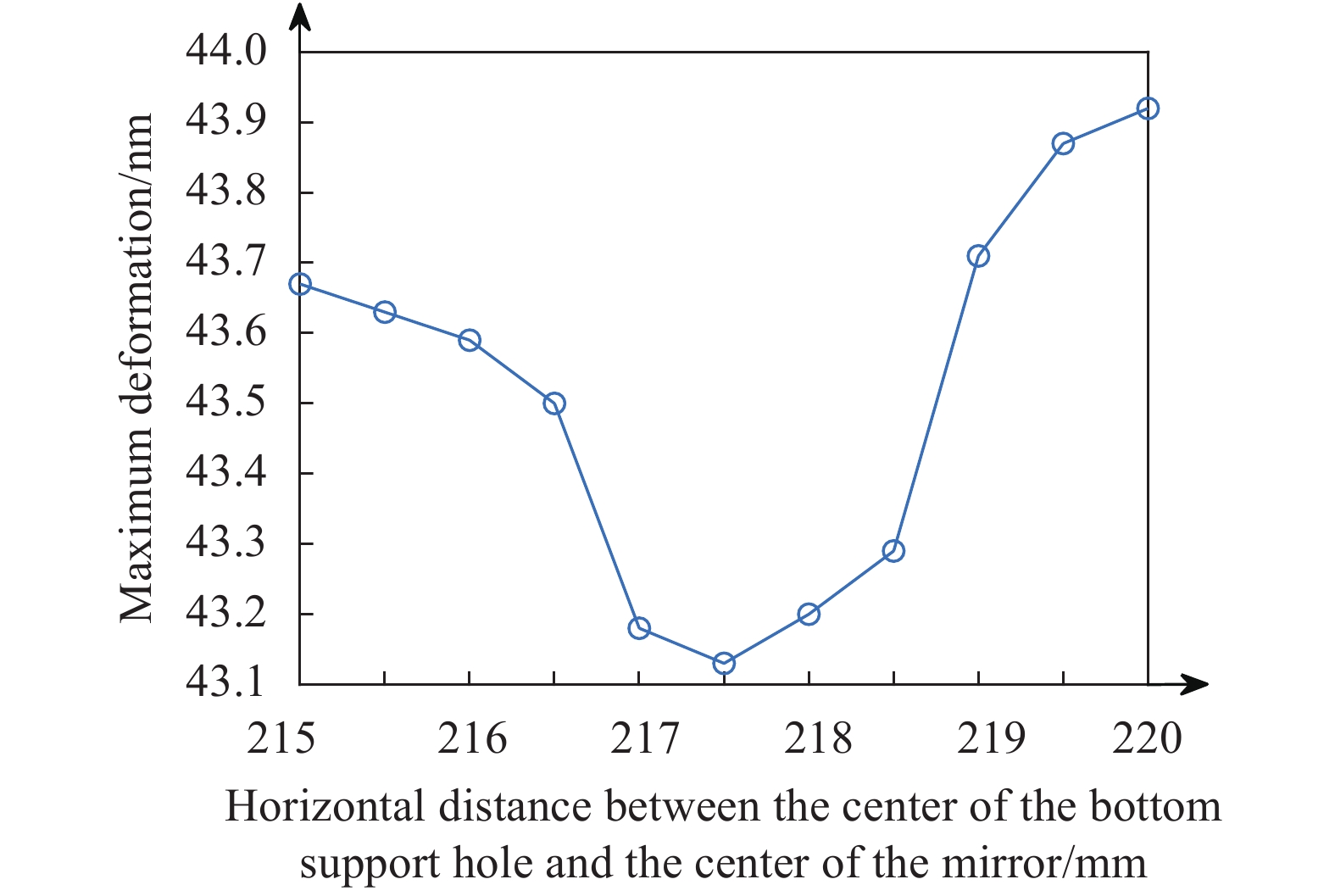
(2)以实体反射镜最优支撑点位置为参考,对轻量化反射镜光轴竖直放置时自重工况进行分析,根据变形云图和镜面节点变形情况调整底部两支撑点的距离。以反射镜轴向重力工况下的镜面节点最大变形作为优化目标,主要调节的关键参数是底部两支撑孔间的中心距,若镜面中部节点变形较大,则减小两支撑点间的跨距;若镜面两端部节点变形较大,则增大两支撑点间的跨距,不断进行重分析迭代寻优,直至镜面节点的变形最小,且镜面边缘和中部区域变形较为均匀为止。若支撑点中心偏离了最佳位置,会导致镜面部分节点产生大的变形,降低整个镜面的面形精度。优化迭代曲线如图2所示,随着底部支撑点与反射镜中心水平距离的增加,反射镜最大变形呈先降后升的规律变化,在底部支撑点与反射镜中心水平距离为217.5 mm时,反射镜变形最小。最终确定轻量化反射镜支撑点分布如图3所示。
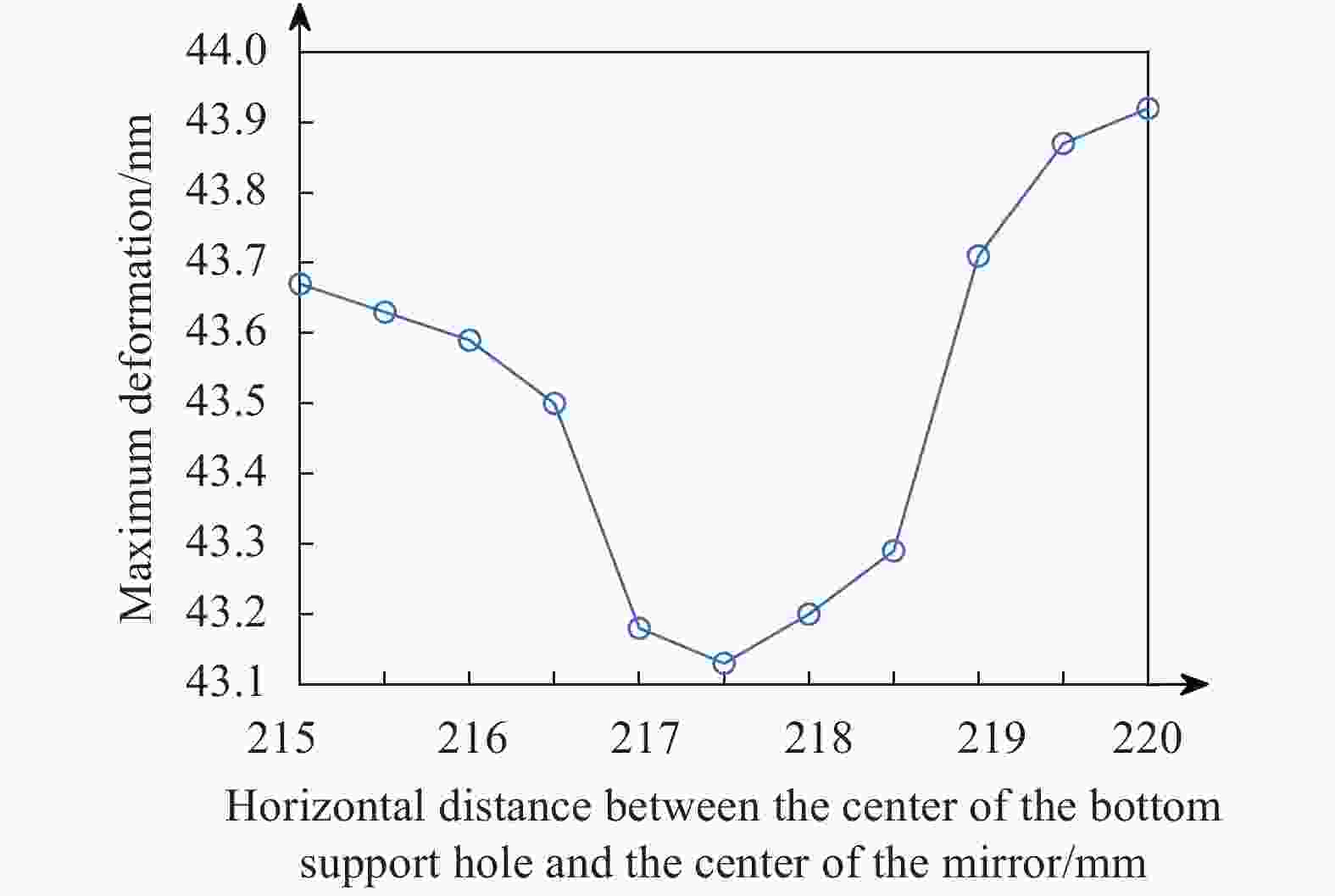
图 2 支撑点位置优化迭代曲线
Figure 2. Iteration curve of support point position optimization
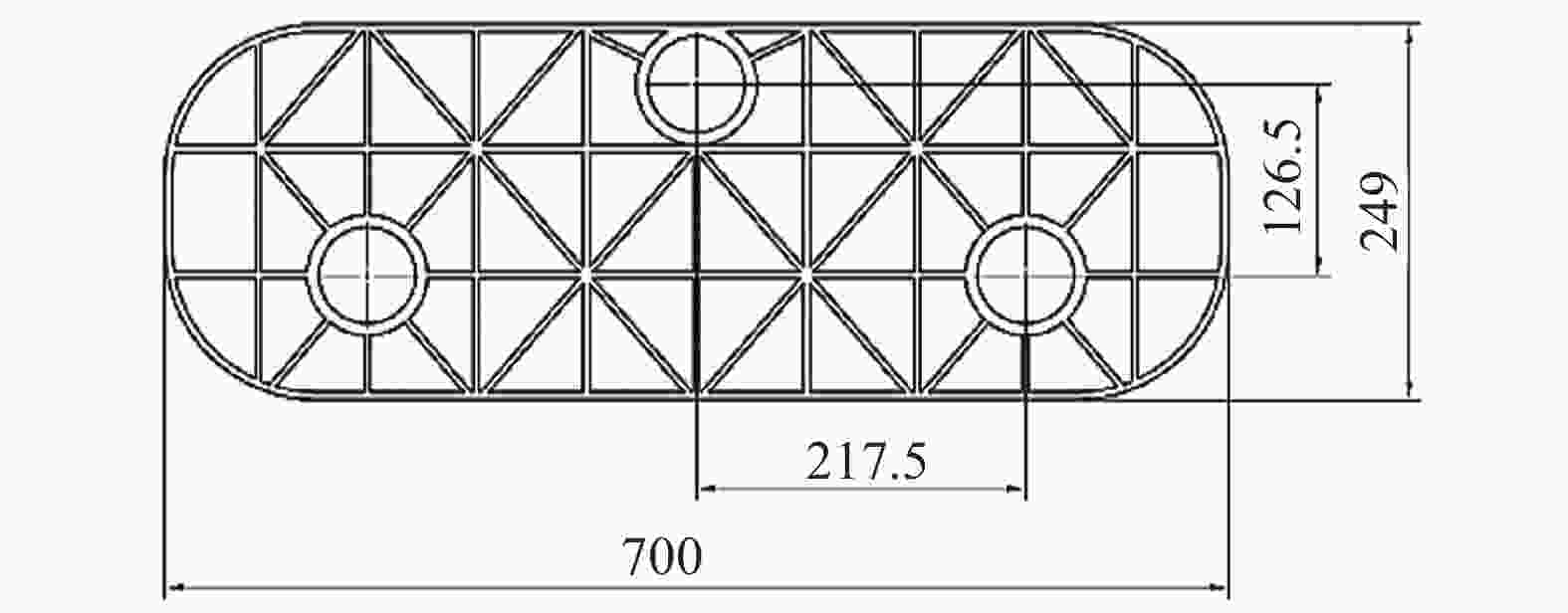
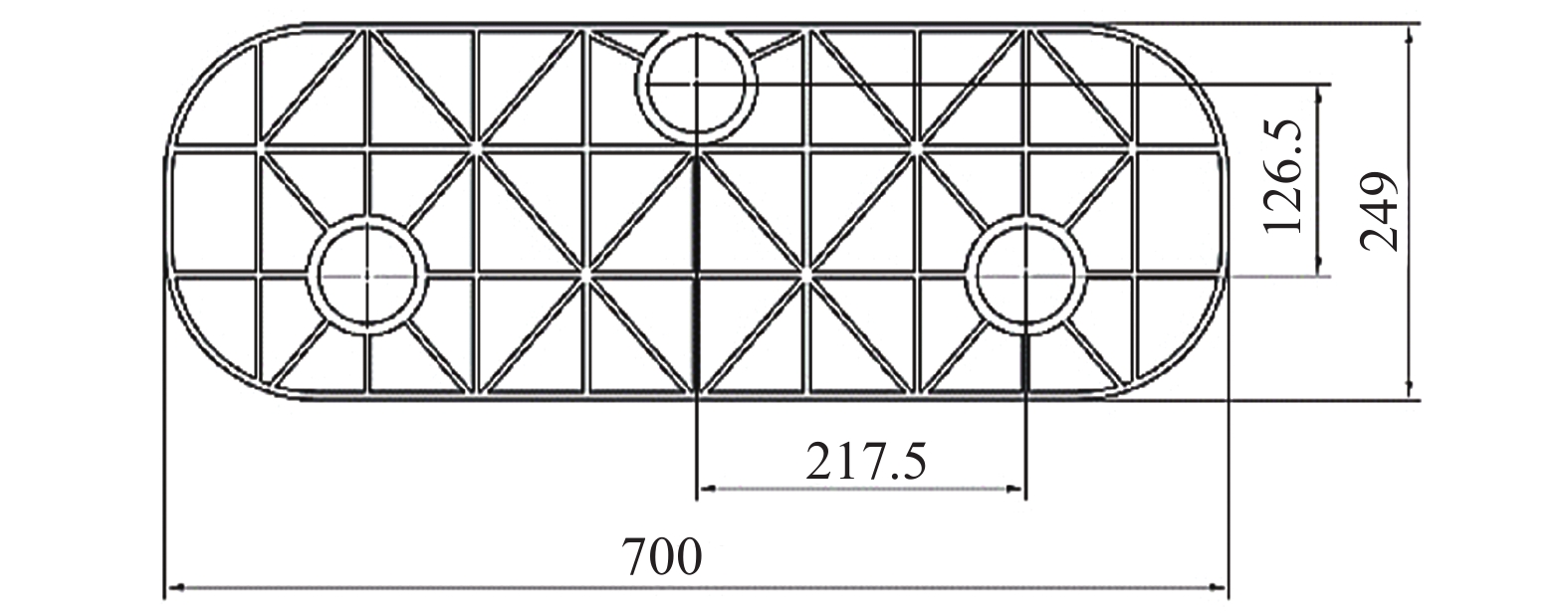
图 3 优化后的支撑点位置
Figure 3. Positions of the support points by optimization
-
支撑结构设计应尽量减少力热环境变化对镜面的不良影响。反射镜支撑结构的作用表现在三个方面:一是抵抗重力对反射镜镜面变形的影响;二是保证反射镜组件的基频足够高,不会因动力学环境发生共振而产生塑性变形或破坏;三是在反射镜温度变化时保持稳定。支撑结构要能将其他结构热致变形抵消或抵抗在反射镜结构之外,保证不将其他结构形变应力作用到反射镜。
在反射镜支撑结构设计时,既要求三个轴向支撑刚度不宜过大,以改善反射镜在空间微重力和热环境下的面形精度,又需要三个轴向支撑刚度不宜过小,以保证结构的动态刚度,这对支撑结构的设计提出了严峻的挑战。柔性支撑技术利用结构的柔性,能够很好地折衷解决上述两方面问题。此外,柔性支撑能够抵消因支撑结构安装工艺误差所致变形,改变传力路径,削弱支撑结构工艺误差对反射镜面形精度的影响[14]。在反射镜结构系统中,通常利用柔性铰链的柔性环节变形来吸收应变能以实现载荷卸载,从而降低支撑结构应力、应变对反射镜面形的影响。
文中提出的柔性支撑结构是一种双轴柔性铰链,其关键在于柔性铰链刚度的设计。柔性铰链的刚度是柔性铰链的首要设计指标,分析单个柔性铰链在外力弯矩作用下的转角刚度就可以清楚地了解柔性铰链刚度与其几何参数之间的关系,有利于柔性铰链的参数化设计。根据参考文献[15]的推导,整理得到圆弧形柔性铰链的转角刚度计算公式:
$$\theta = \int {\frac{{12MR\sin \alpha }}{{Eb\left( {2R + t - 2R\sin \alpha } \right)}}} \rm d\alpha $$ (4) $${K} = \frac{{M}}{\theta } = \frac{{Eb{R^2}}}{{12f}}$$ (5) $$ \begin{split} f =& \dfrac{{8{s^4}\left( {2s + 1} \right)\tan \dfrac{{{q_m}}}{2}}}{{{{\left( {4s + 1} \right)}^2}{{\left[ {1 + \left( {4s + 1} \right){{\tan }^2}\dfrac{{{q_m}}}{2}} \right]}^2}}} +\\ & \dfrac{{4{s^3}\left( {6{s^2} + 3s + 1} \right)\tan \dfrac{{{q_m}}}{2}}}{{{{\left( {4s + 1} \right)}^2}{{\left[ {1 + \left( {4s + 1} \right)\tan \dfrac{{{q_m}}}{2}} \right]}^2}}} + \\ & \dfrac{{12{s^4}\left( {2s + 1} \right)\arctan \left( {\sqrt {4s + 1} \tan \dfrac{{{q_m}}}{2}} \right)}}{{{{\left( {4s + 1} \right)}^{\frac{5}{2}}}}} \end{split} $$ (6) $$s = \frac{R}{t}$$ (7) 其中,f是角变形θ计算时的中间量。式中:R和qm分别为切割圆的半径和圆心角;b为宽度;t为最薄弱环节处厚度。具体如图4所示。
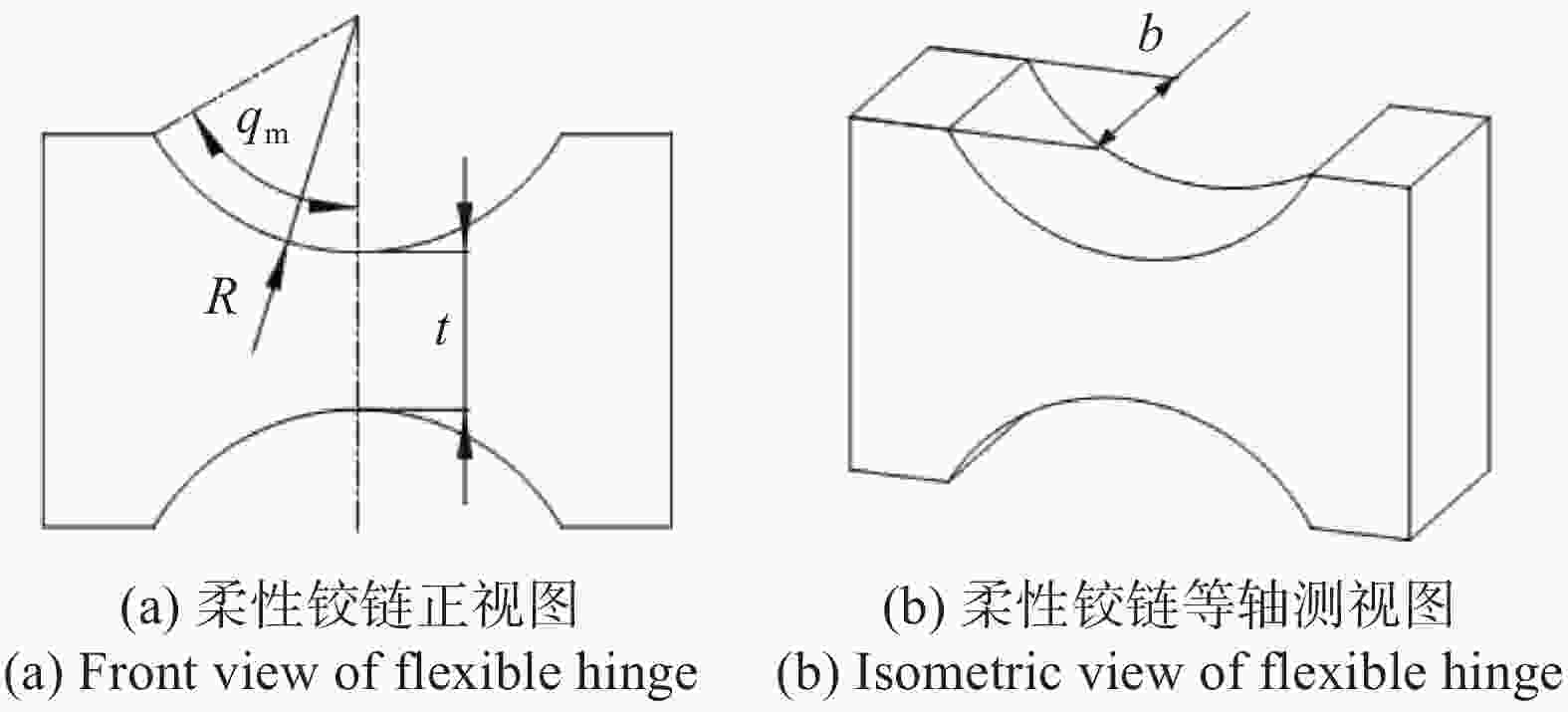
图 4 柔性铰链关键参数示意图
Figure 4. The schematic diagram of key parameters of flexure hinge
参考文献[16]指出,对于圆弧形柔性铰链,其刚度受最薄处厚度t影响最显著,圆弧半径R和圆心角的影响依次减弱,宽度b的影响最小。在柔性铰链设计时可以先确定结构中的弱影响部位参数,再改进优化敏感参数t和R,保证设计达到合适的转角刚度。表2及图5给出了选定圆弧半径及圆心角后t值在2~4 mm范围内反射镜面形RMS及基频的变化。从表2可见,随着柔性铰链最薄处厚度t的增加,反射镜组件的基频也随之增加;X、Y、Z三向自重工况下反射镜面形RMS随着t的增加呈先降后升的变化规律,这是因为系统的刚度和柔性铰链的柔度到达平衡需要一个过程,平衡状态时面形表现最优,而刚度的进一步增加打破平衡,削弱了柔度,所以面形变差。虽然Y向自重工况下反射镜面形在t=2.5 mm时最优,但其余方向自重工况下均在t=3.0 mm时面形最优,尤其是X向自重工况仅在此时满足面形要求,所以确定t值为3 mm。设计柔性铰链具体参数为:b为50 mm,t为3 mm,R为1.5 mm,圆弧圆心角为90°。
表 2 柔性铰链t值对反射镜组件的影响
Table 2. Influence of flexible hinge t value on mirror assembly
t/mm X-direction
self-weight
RMS/nmX-direction
self-weight
RMS/nmX-direction
self-weight
RMS/nmFundamental
frequency/Hz2 13.69 8.92 11.54 252.6 2.5 13.68 8.66 11.46 256.1 3 12.43 8.81 10.10 259.3 3.5 13.63 8.96 11.32 262.3 4 13.62 9.09 11.47 265.0 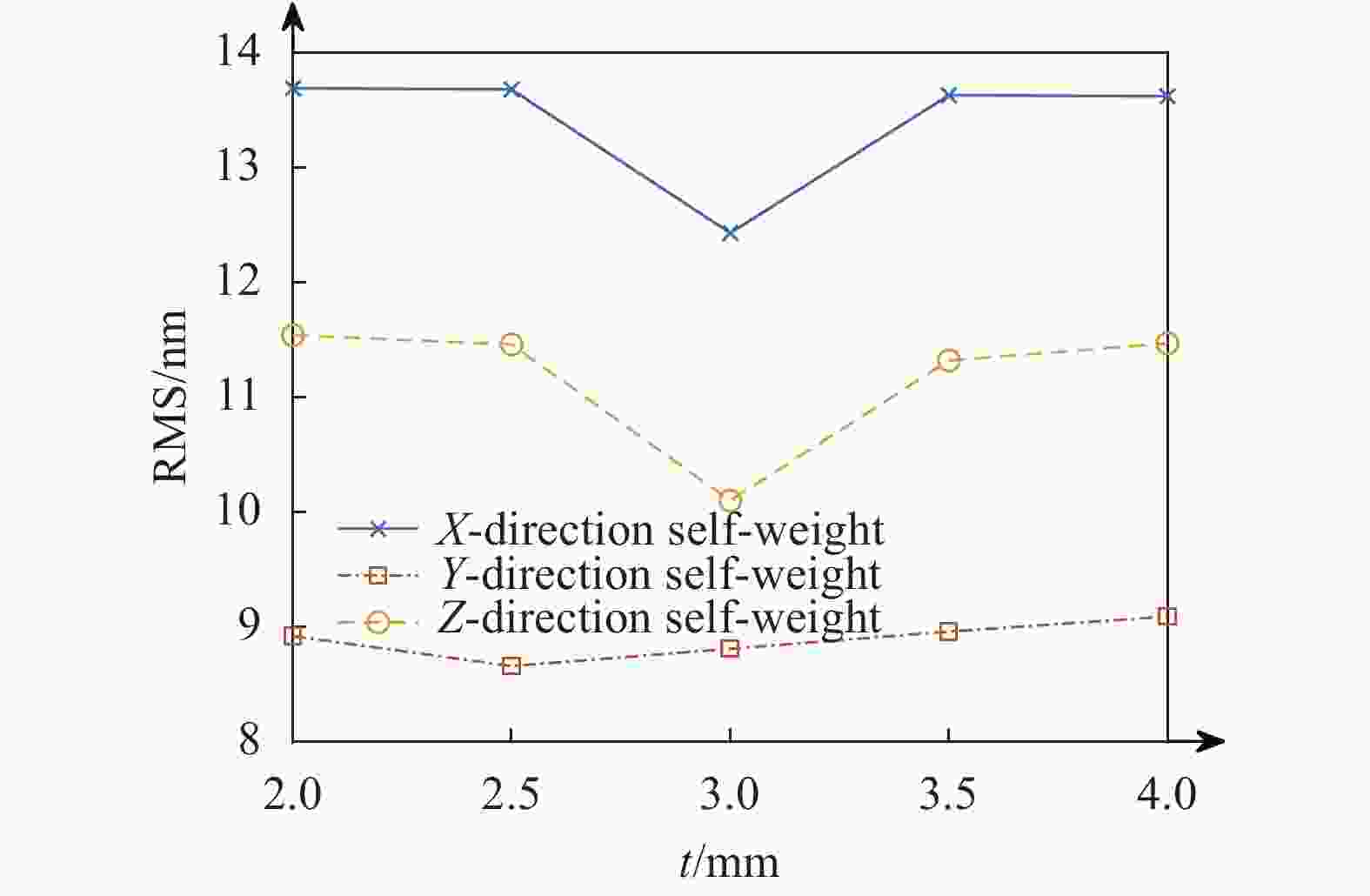
图 5 柔性铰链t值对反射镜自重面形RMS的影响曲线
Figure 5. Curves of influence of t value of flexible hinge on RMS of self-weight surface of mirror
-
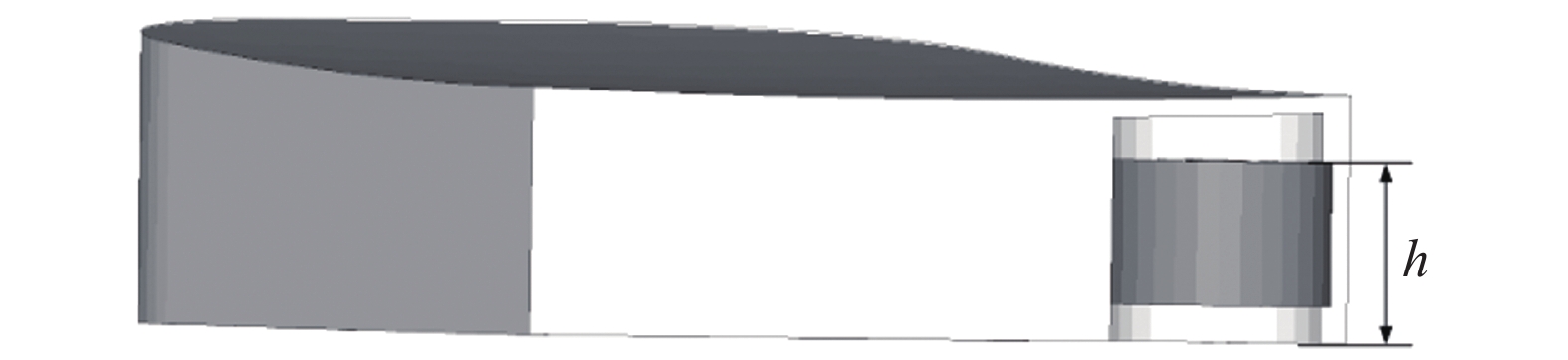
在SolidWorks软件中建立轻量化反射镜模型,并评估质量属性得到反射镜的质心位置,质心在反射镜厚度方向距离反射镜背部平面46 mm的平面上。从质心位置出发,改变支撑安装深度h值,h为支撑结构顶端与反射镜背部平面间的垂直距离,考查反射镜在X、Y、Z三轴向重力下的反射镜面形值,从而确定支撑结构在支撑孔中的安装深度,图6为支撑结构安装深度示意图。
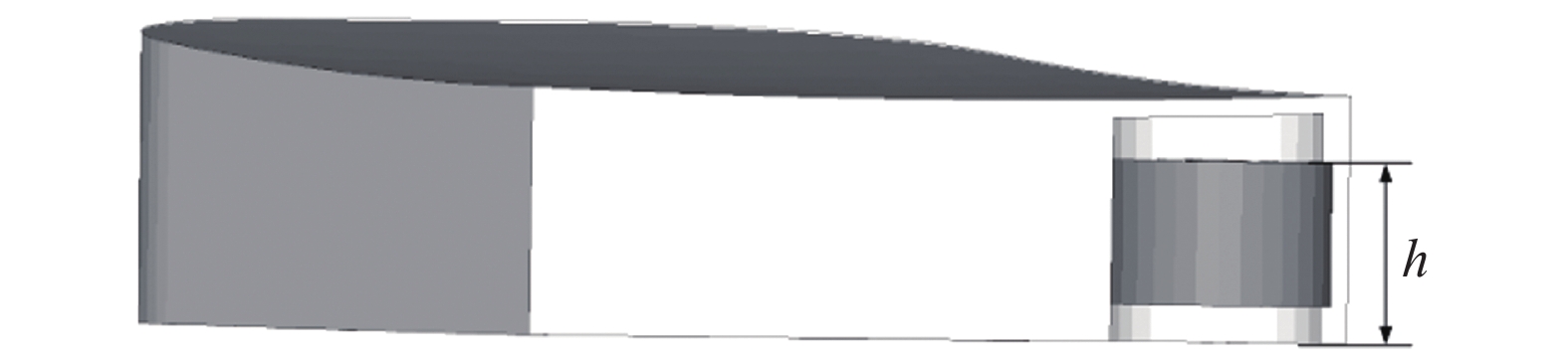
图 6 支撑结构安装深度
Figure 6. Supporting structure constraint depth
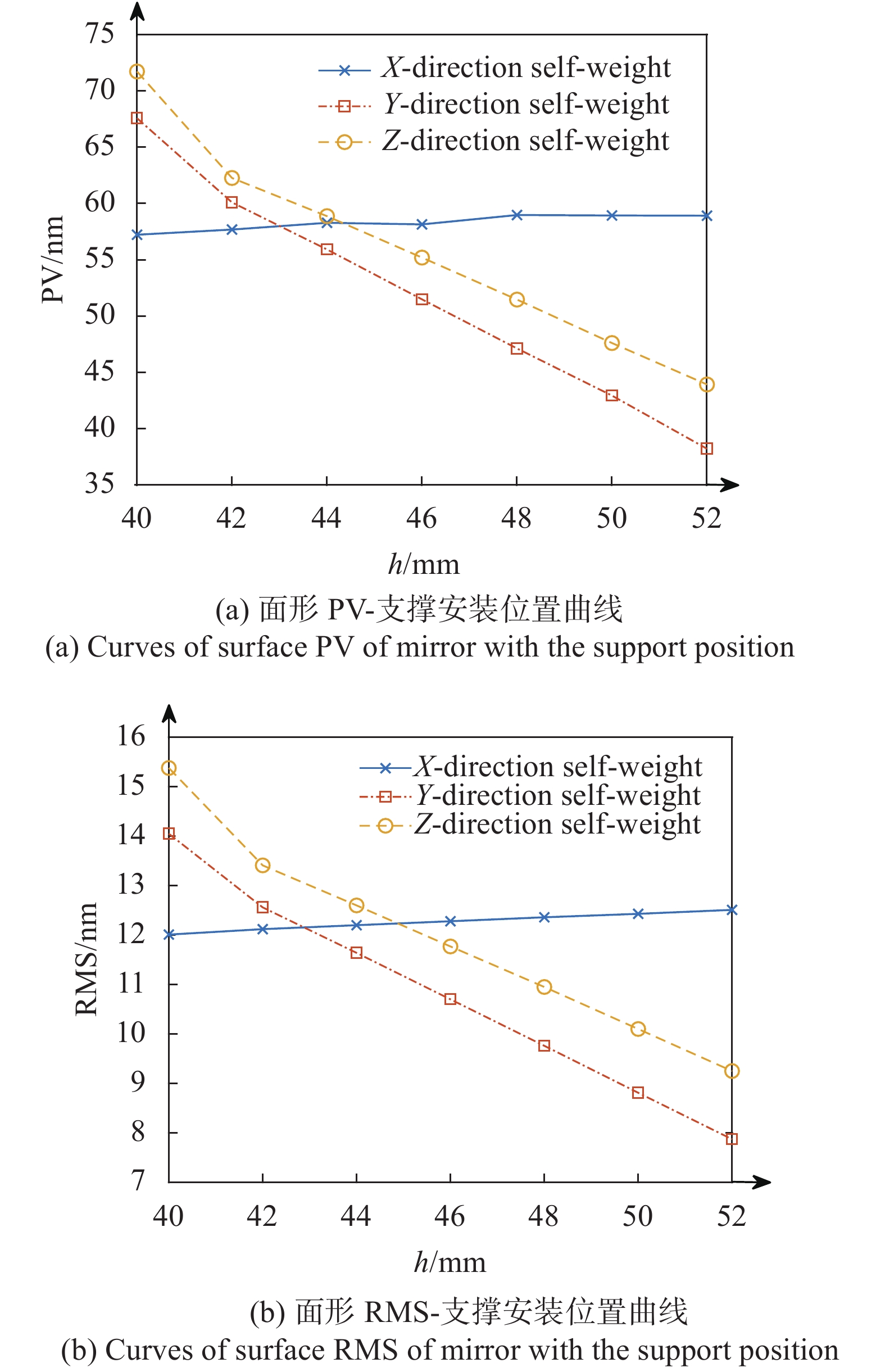
图7为反射镜自重面形PV和RMS值与安装位置曲线。从图中可以看出,随着安装深度的增加,X向重力反射镜的面形逐渐变差,Y向和Z向重力反射镜的面形逐渐变优,所以支撑安装位置深度并非是越大越好。在不断调整支撑安装深度的过程中发现,其对反射镜在各轴向自重下反射镜的面形影响呈线性关系,与反射镜厚度方向(X向)自重所致的面形呈正相关,支撑安装深度越大,面形越差;而与反射镜宽度(Y向)和长度(Z向)方向自重的面形呈负相关,支撑安装深度越大,面形也越优。支撑安装位置对反射镜长度和宽度方向重力面形RMS的影响超过对厚度方向重力面形RMS影响10倍以上。为了避免反射镜安装产生倾覆力矩,根据反射镜组件的有限元分析结果及面形RMS值,确定支撑结构安装深度为46 mm。

图 7 反射镜自重面形-支撑安装位置曲线
Figure 7. Curves of the self-weight surface of the mirror with respect to the support position
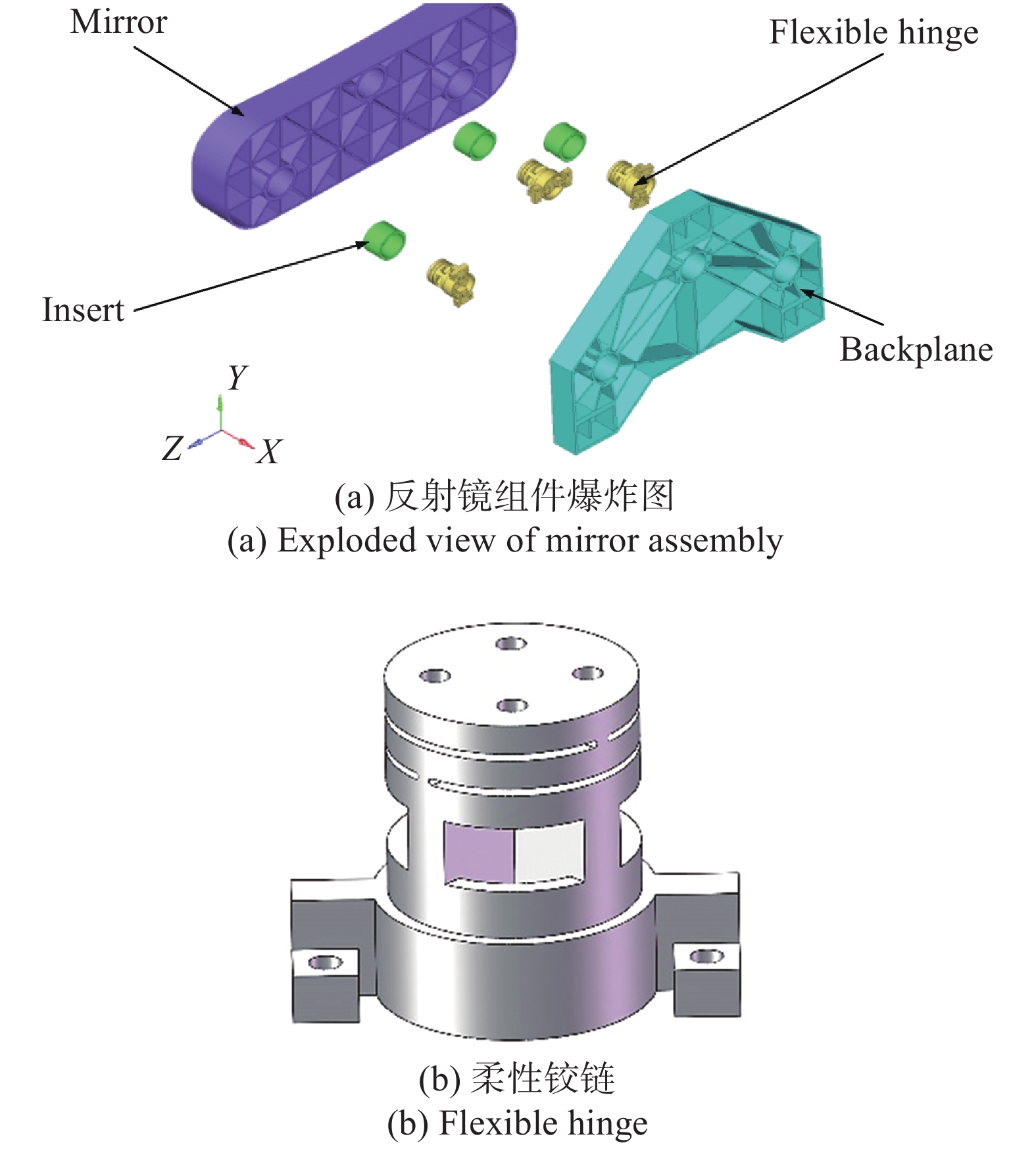
反射镜组件由反射镜及其支撑结构组成,其中支撑结构包含镶嵌套、柔性支撑和背板。反射镜组件结构的爆炸图和柔性铰链如图8所示。反射镜组件结构中,镶嵌套选材需要与SiC材料的线胀系数相匹配,故选用殷钢材料,殷钢材料具有线膨胀系数在一定范围内可调的特性,可以将殷钢的线膨胀系数调整到与SiC材料的线膨胀系数相同,实现完全热匹配。不与镜体直接接触的背部支撑板选用高比刚度、尺寸稳定性好的高体分SiC/Al材料。镜体支撑孔内通过胶粘接殷钢(4J32)材料的镶嵌套,钛合金(TC4)柔性支撑件与镶嵌套用螺钉连接,柔性支撑结构的另一端通过螺钉与与高体分铝基复合材料(SiC/Al)制作的背部支撑板相连接。最终,反射镜组件总重20.8 kg,满足组件质量设计要求。
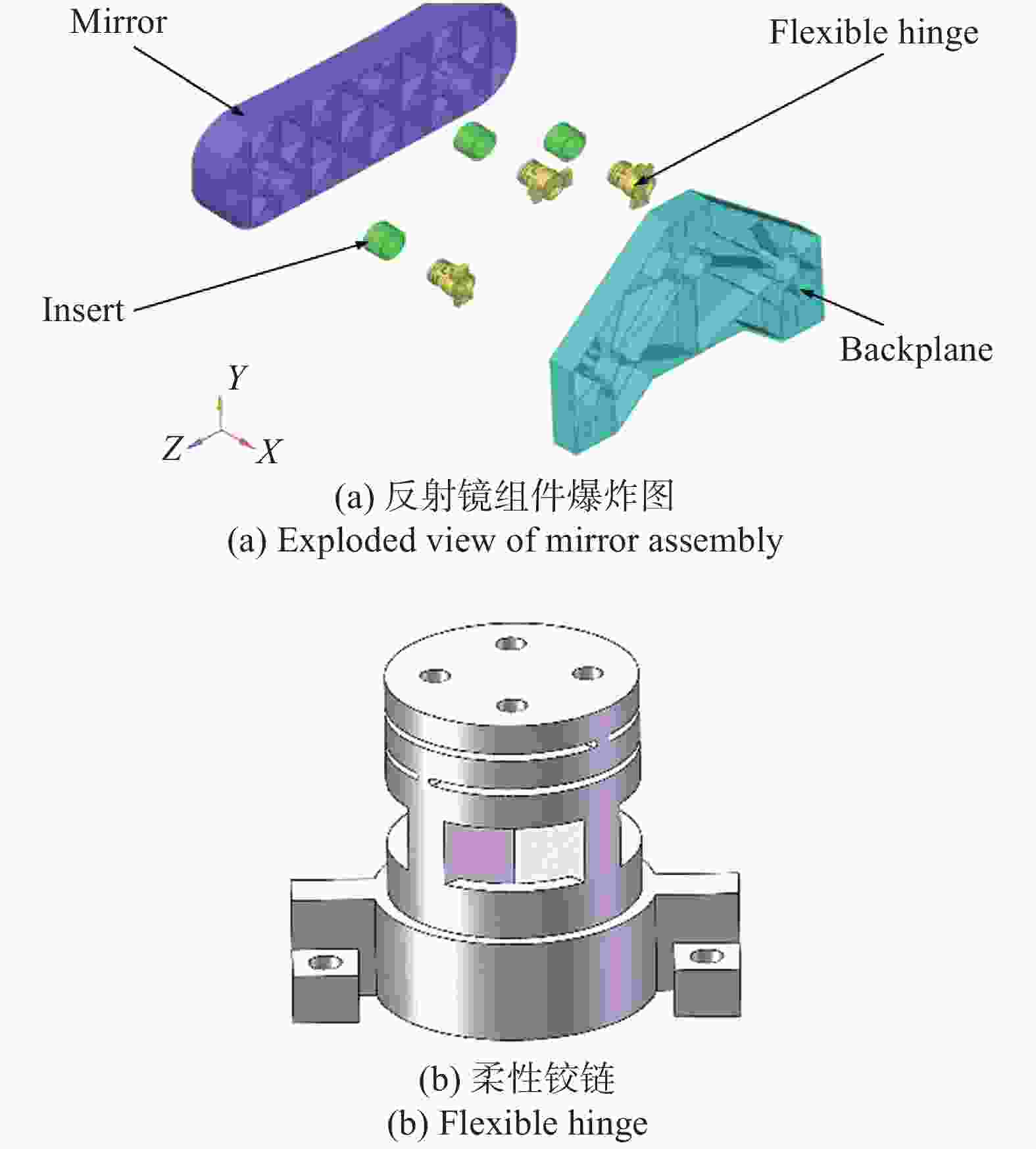
图 8 反射镜组件模型
Figure 8. Model of mirror assembly
-
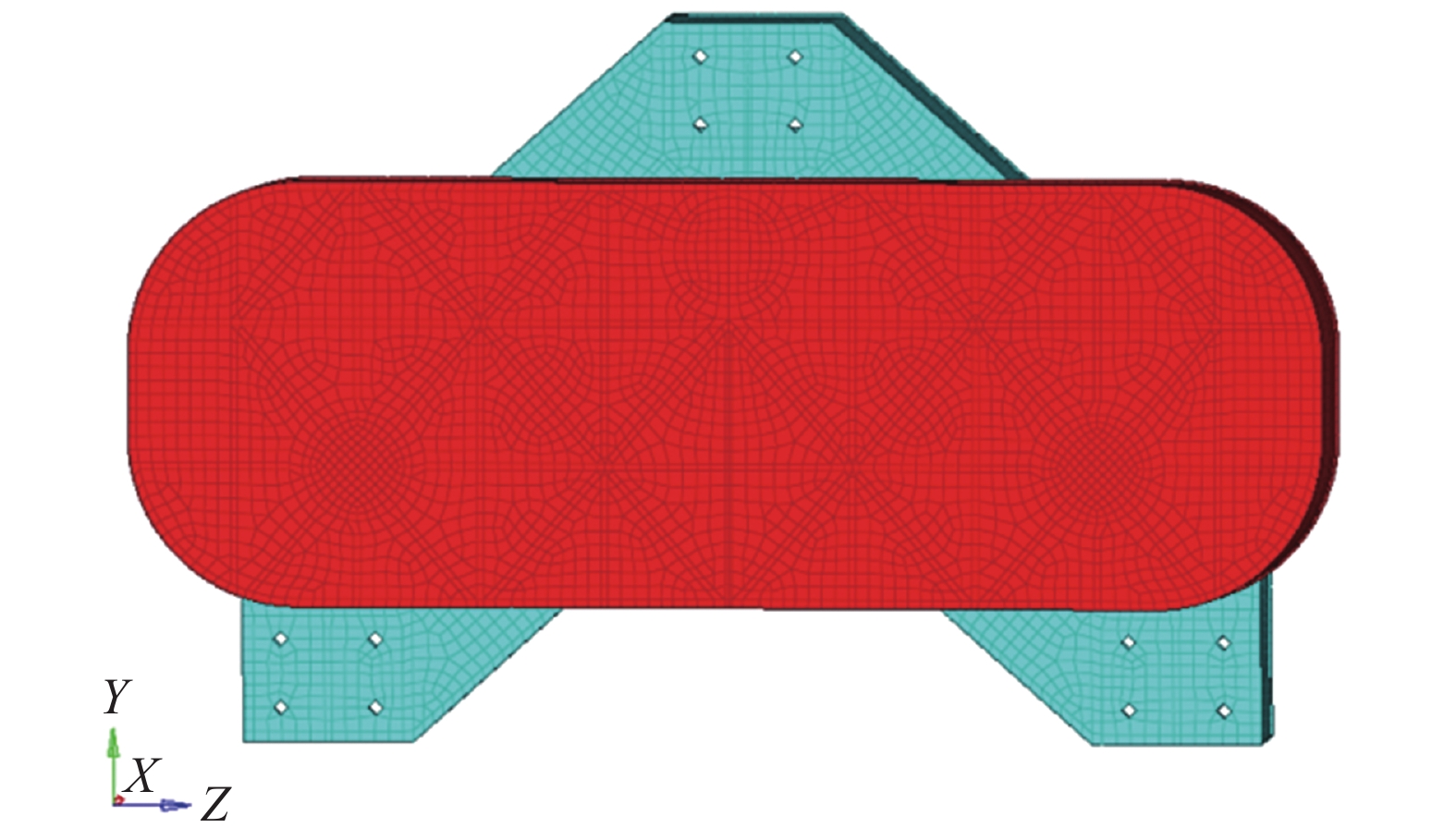
采用MSC.Patran & Nastran软件对反射镜组件进行有限元分析,反射镜有限元模型以8节点六面体单元为主,辅以6节点的五面体单元构成,共计49 322个单元,81 138个节点,有限元模型如图9所示,组件各部分应用材料参数见表3。
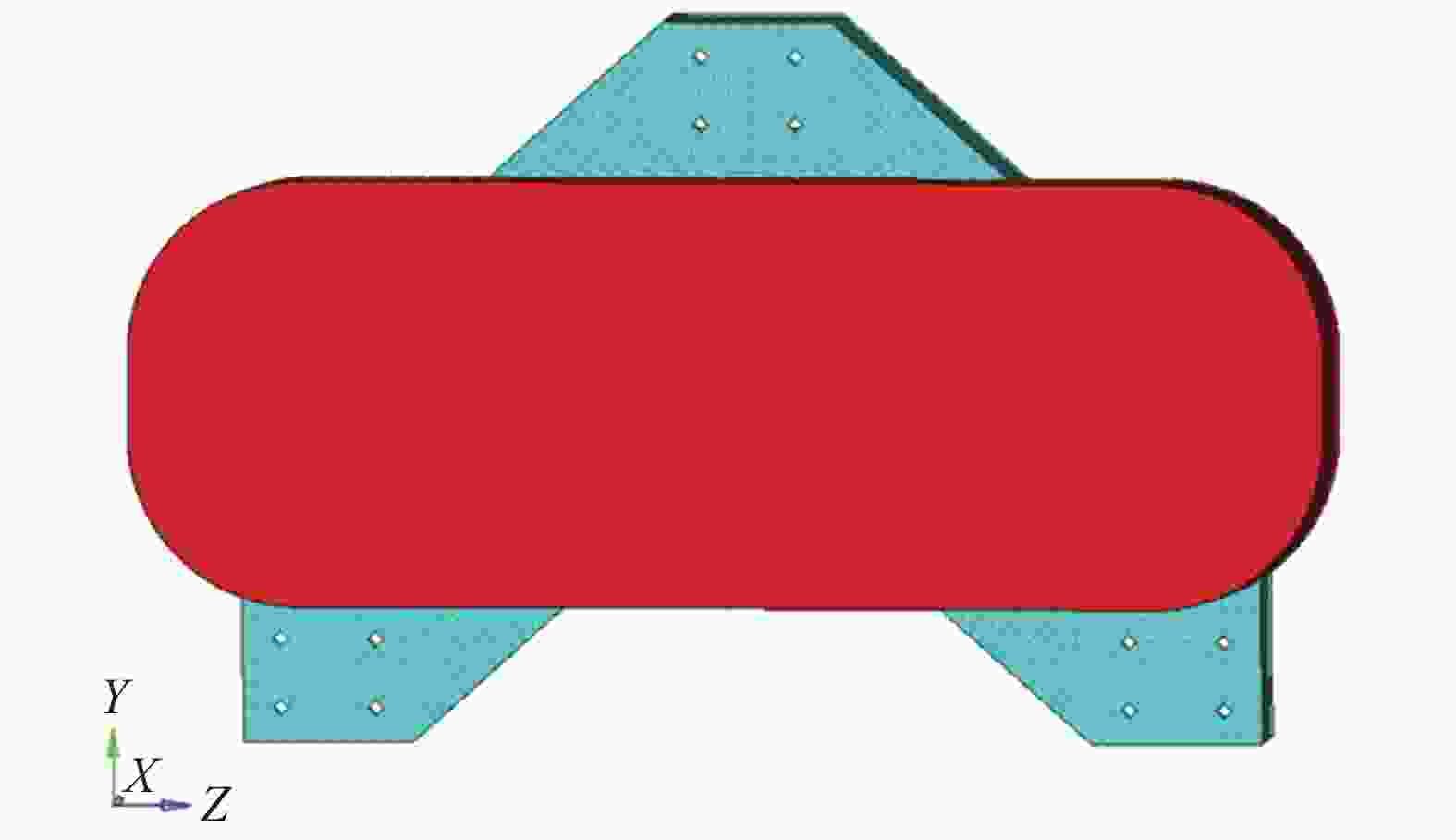
图 9 反射镜组件有限元模型
Figure 9. Finite element model of mirror assembly
表 3 反射镜组件材料参数
Table 3. Material parameters of mirror assembly
Material Density ρ /
g·cm−3Elastic modulus
E /GPaPoisson’s
ratio μThermal expansion
coefficient
α/10−6·℃−1RB-SiC 3.05 340 0.2 2.5 4J32 8.1 150 0.28 2.5 TC4 4.44 109 0.34 8.9 SiC/Al 2.95 190 0.2 8.1 -
反射镜在太空环境工作时,经受空间微重力及温变载荷,通过自重载荷和均匀温升工况考查反射镜在重力和热环境下的面形精度,载荷方向同图9中坐标方向一致。
表4列出反射镜在三轴方向重力与5 ℃均匀温升工况下反射镜的面形结果。从表4分析结果可见,反射镜在自重和5 ℃均匀温升分别作用下,PV值和RMS值最大为58.2 nm和12.3 nm;另外,在反射镜检测方向(Y方向)自重及5 ℃均匀温升耦合作用下,PV值和RMS值分别为33.3 nm和6.8 nm,满足PV≤63.2 nm、RMS≤12.6 nm的光学设计指标要求。
表 4 反射镜组件各向自重及温升分析结果
Table 4. Analysis results of the self-weight and temperature rise of the mirror assembly
Maximum
deformation/μmPV/
nmRMS/
nmX-direction 1 g gravity 1.53 58.2 12.3 Y-direction 1 g gravity 2.82 51.5 10.7 Z-direction 1 g gravity 3.06 55.2 11.8 5 ℃ uniform temperature rise 9.5 17.2 3.9 Y-direction 1 g gravity + 5 ℃ uniform temperature rise 9.23 33.3 6.8 -
航天器在发射阶段的动力学环境是其整个任务周期内所经历的最严苛的力学环境。发射动力学环境可能对反射镜组件等光学元件及支撑结构造成塑性变形和疲劳破坏等[17],因此需要在光机结构设计阶段进行动态特性分析。
-
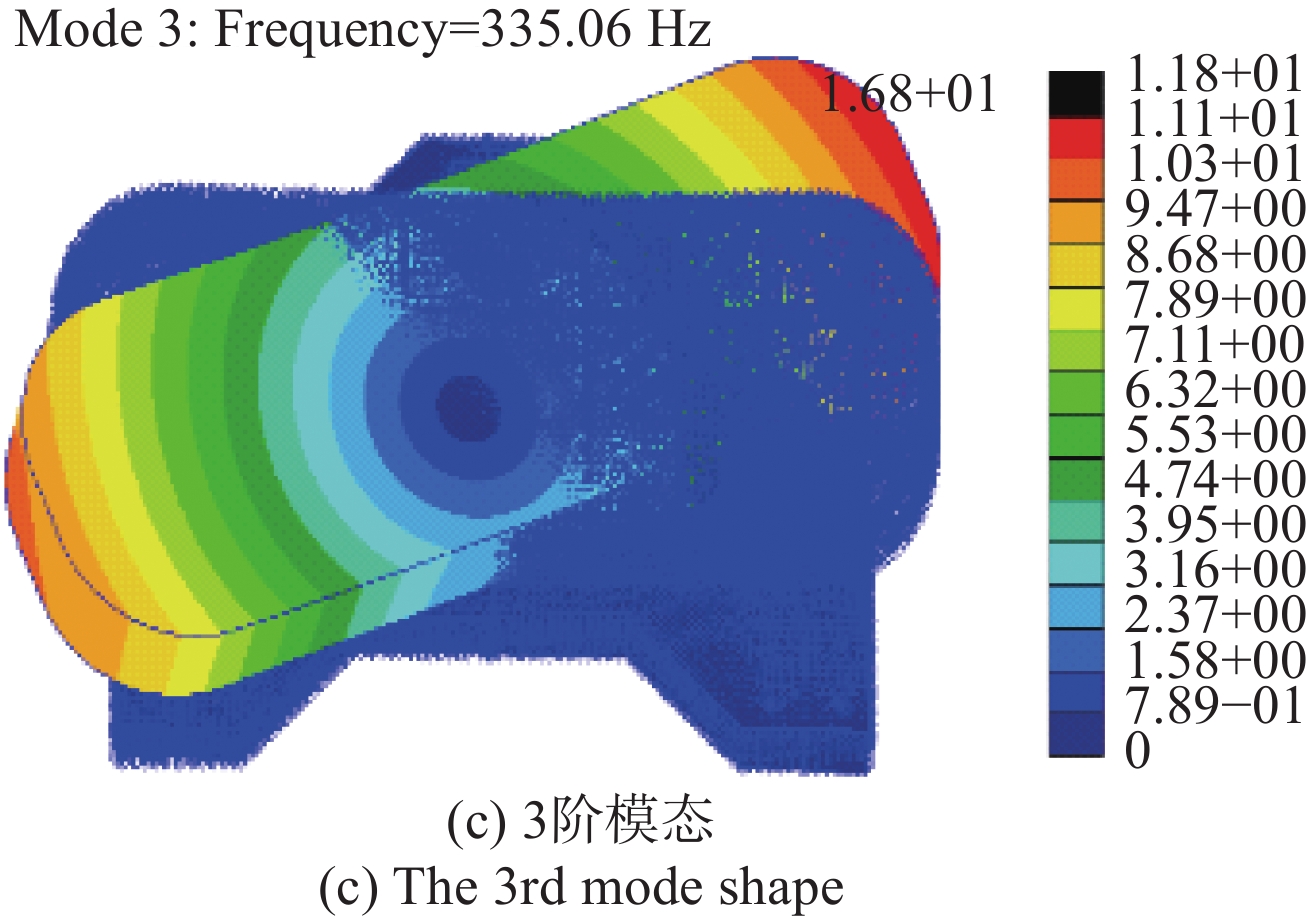
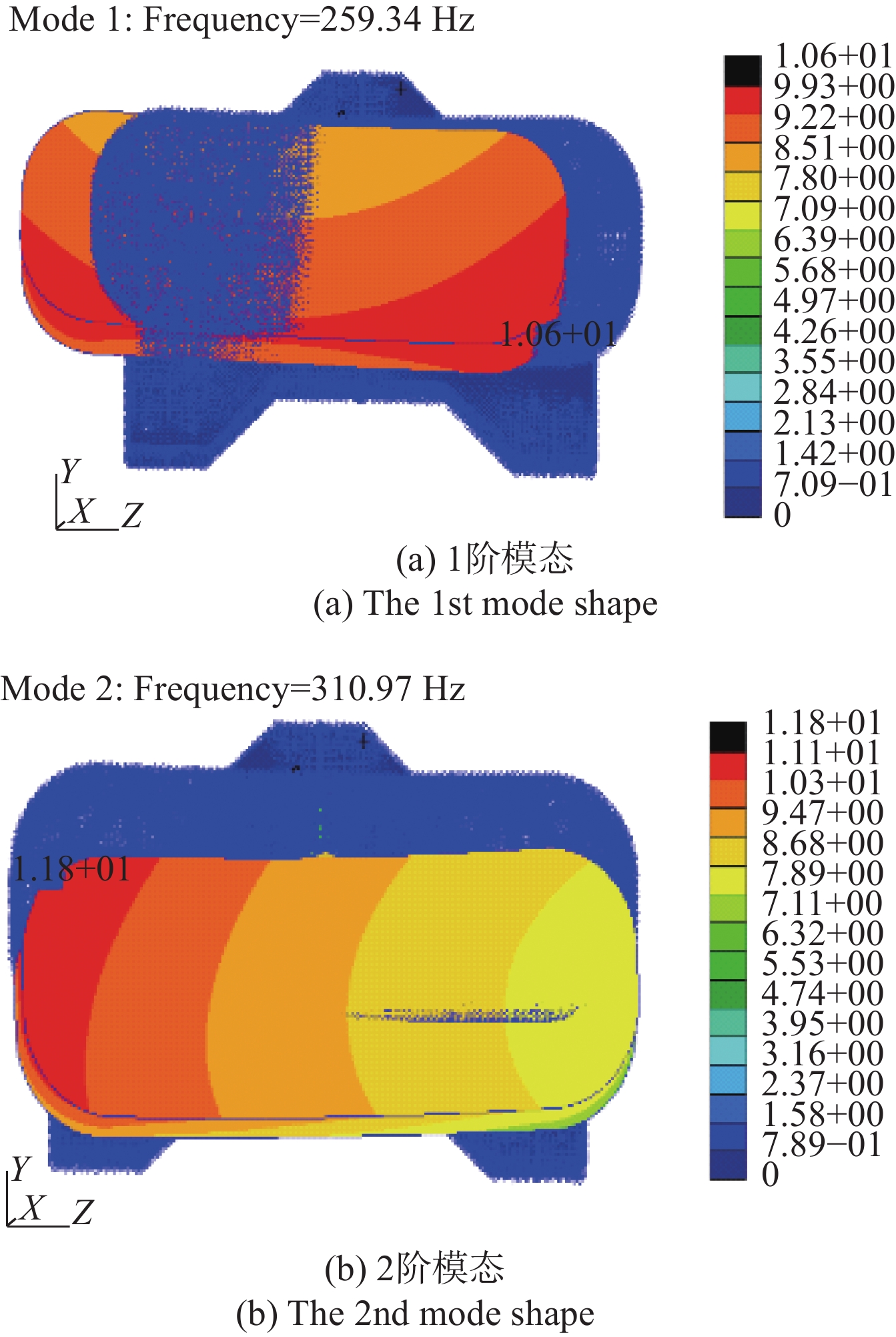
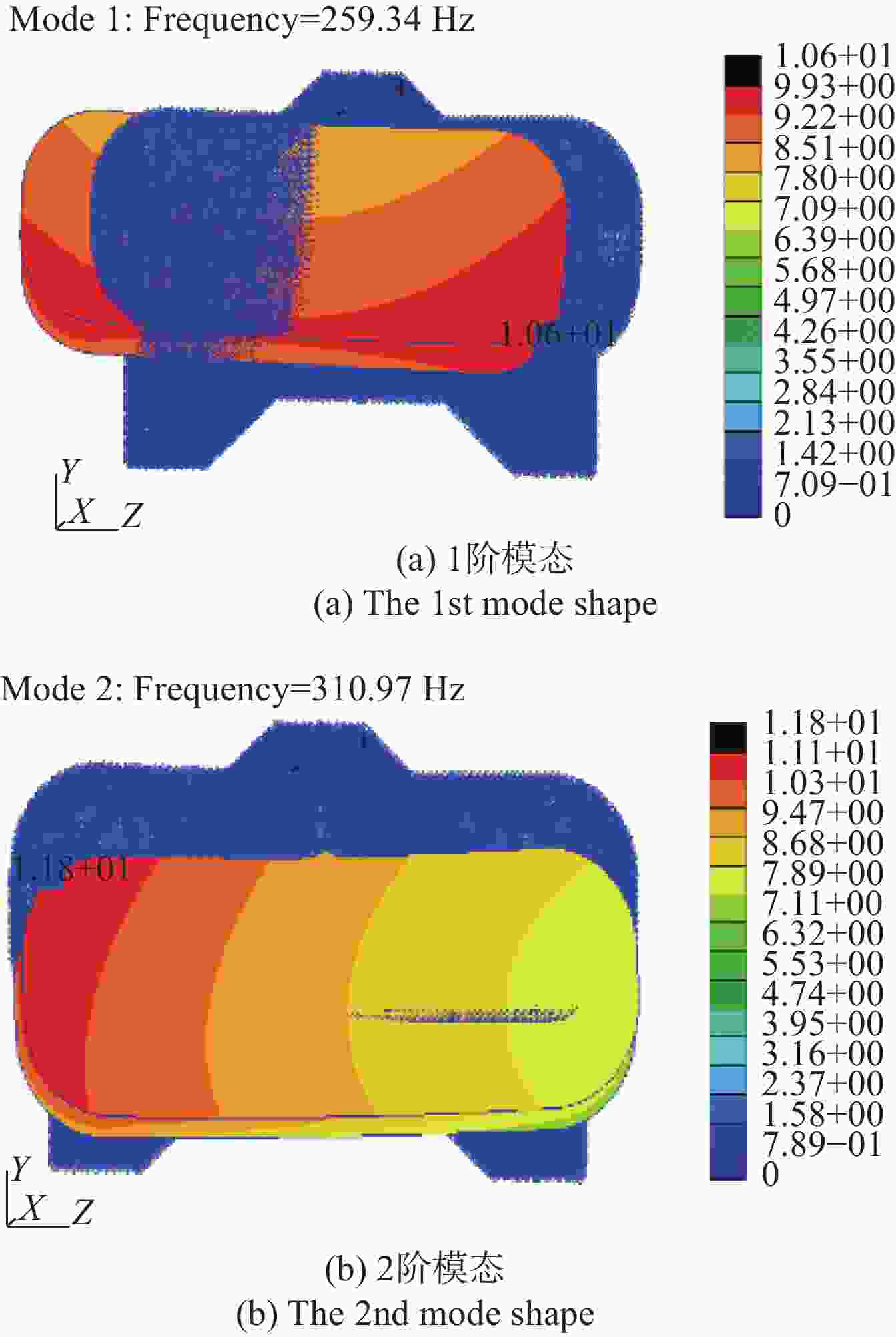
通过模态分析可以考查反射镜结构系统的动态刚度。在背部支撑三角板的螺栓连接孔位置定义6自由度全约束。计算分析反射镜组件前6阶模态,结果见表5。反射镜组件一阶固有频率为259 Hz,具有较高的动态刚度,能够满足设计指标要求(≥100 Hz),一阶主振型为反射镜沿Z轴方向平动,前3阶振型如图10所示。
表 5 反射镜组件前6阶模态分析结果
Table 5. Analysis results of the first six order mode shapes of mirror assembly
Order Frequency/Hz Mode shapes 1 259 Mirror moves in the Z direction 2 311 Mirror moves in the Y direction 3 335 Mirror rotates around the X axis 4 408 Mirror rotates around the Z axis 5 438 Mirror rotates around the Y axis 6 484 Mirror moves in the X direction 
图 10 反射镜组件前3阶振型图
Figure 10. The first three order mode shapes of mirror assembly
从图10可以看出,若外界激励频率接近259 Hz时反射镜将易发生Z向(沿镜长方向)振动,外界激励频率达311 Hz时,振型表现为反射镜Y向(沿镜宽方向)振动,激振频率若达到335 Hz,则将激起反射镜绕X轴(光轴方向)的扭转振动。但运载工具与卫星平台的频率一般相对较低,指标要求反射镜组件基频不小于100 Hz即可,故该反射镜组件动态刚度足够高,能够满足设计指标要求。
-
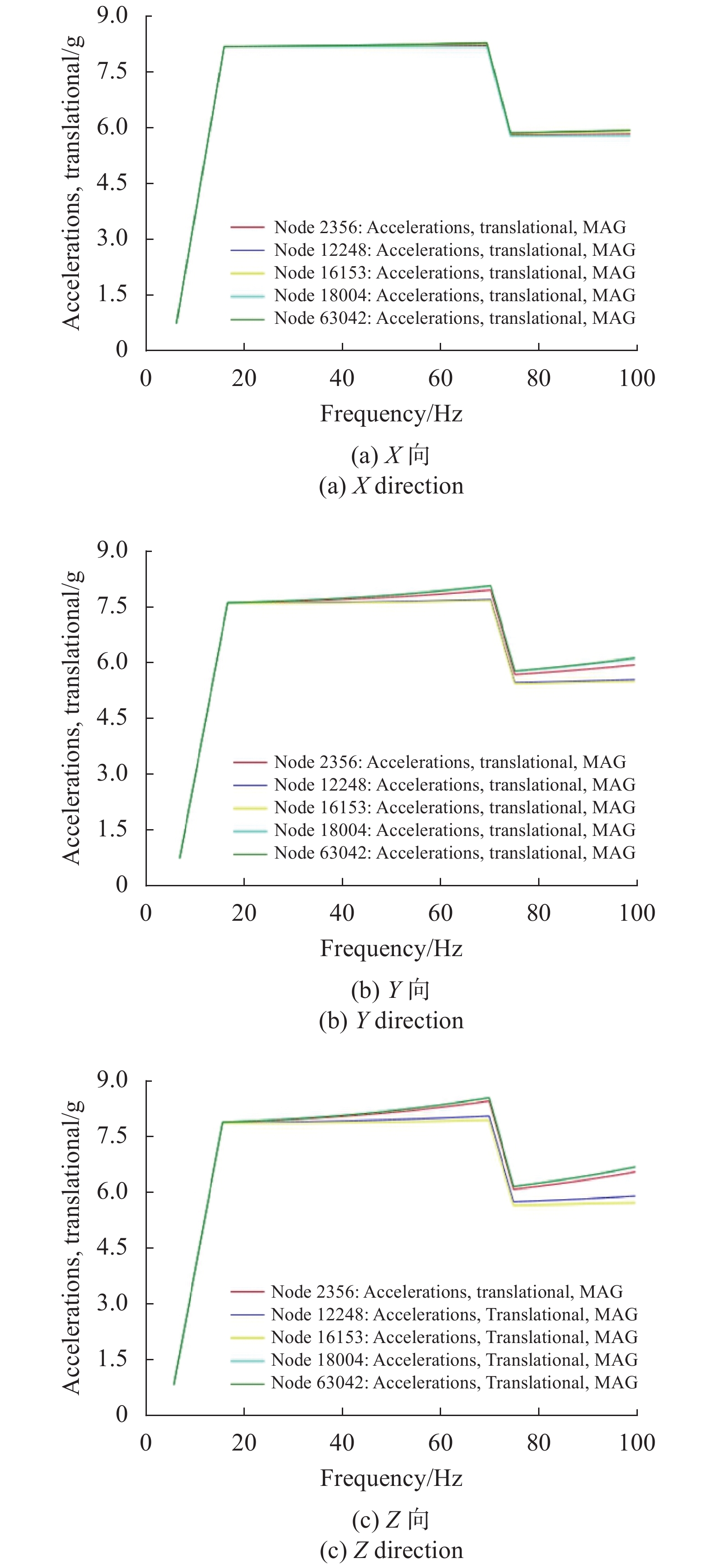
根据给定的低频正弦扫描试验条件(见表6),采用“大质量法”对反射镜组件进行5~100 Hz的正弦扫描振动分析。临界阻尼系数取0.05,使用RBE2单元将大质量点与背部三角板螺栓孔连接,在大质量点处施加单位加速度,使用模态法求解计算。在反射镜镜面和柔性铰链上选取5个节点,作为加速度响应输出结果对象,振动分析结果如图11所示。
表 6 正弦振动激励条件
Table 6. Sine vibration excitation conditions
Frequency/Hz Vibration amplitude Incentive direction 5−15 8.89 mm 15−70 8 g X/Y/Z 70−75 5.7 g 75−100 5.7 g 
图 11 正弦振动加速度响应曲线
Figure 11. Acceleration response curves of sinusoidal vibration
由于反射镜组件一阶固有频率大于100 Hz,在正弦振动条件下未发生共振。可以看到加速度响应曲线均没有共振峰,曲线趋势与激励条件变化基本一致。Y向加速度响应最大放大倍数仅为1.35,小于放大倍数不大于10的标准[18],柔性铰链最大等效应力(von Mises Stress)为138 MPa,远小于钛合金材料的屈服应力877 MPa,所以在低频正弦扫描振动条件下柔性支撑结构不会发生屈服塑性变形或破坏。另外,X和Z方向的加速度响应分别放大1.3倍和1.4倍,均满足要求。
-
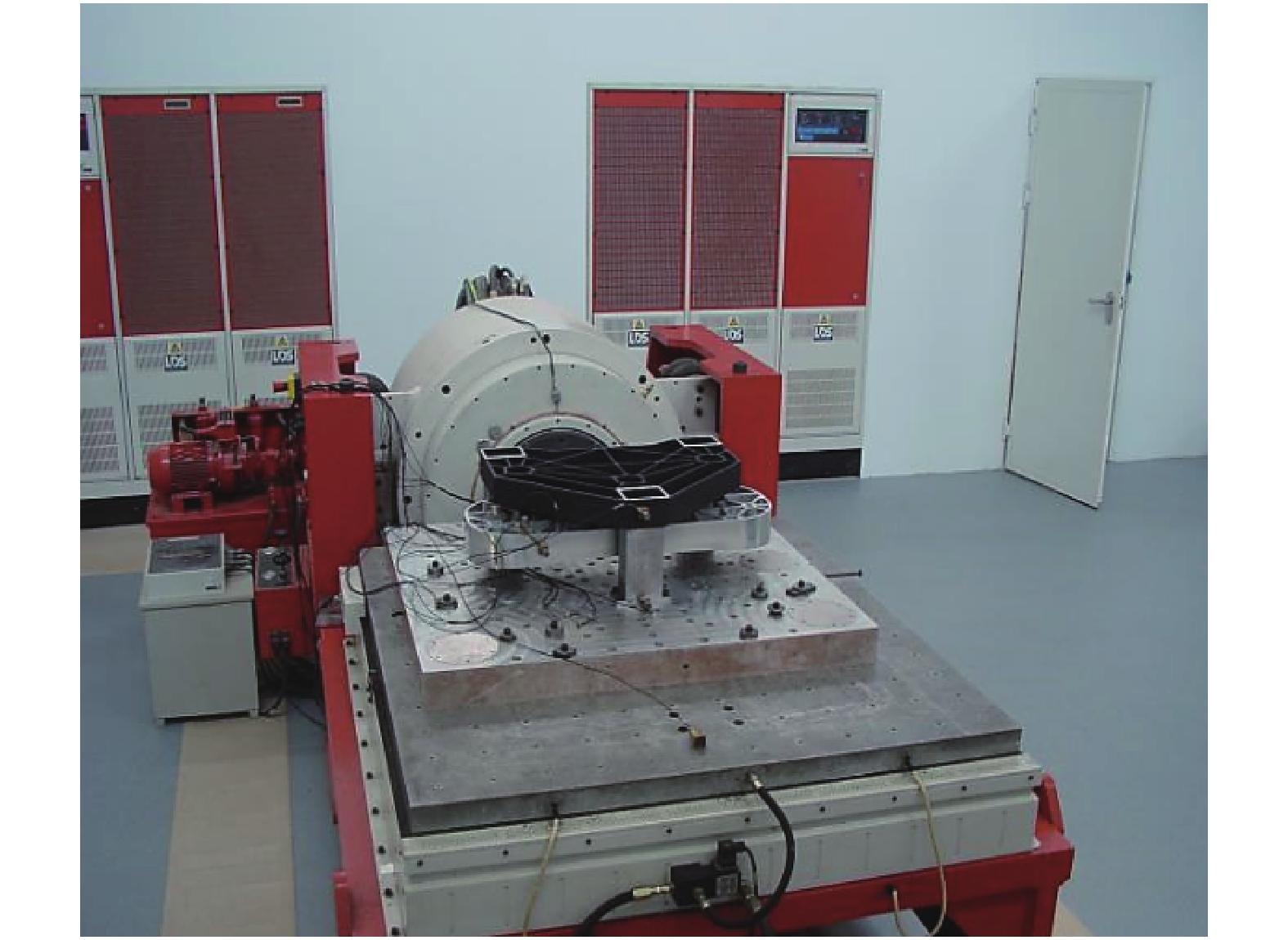
为确定反射镜组件最终结构参数,检验设计的合理性与仿真分析的正确性,考查反射镜组件能否经受动力学环境考验,制作了反射镜组件的模拟力学试验件。反射镜及背部支撑三角板采用铸铝合金制作,柔性铰链采用钛合金TC4材料制作。试验件最大限度地模拟等效了反射镜组件的质量特性和刚度特性。反射镜组件动力学试验测试现场如图12所示。
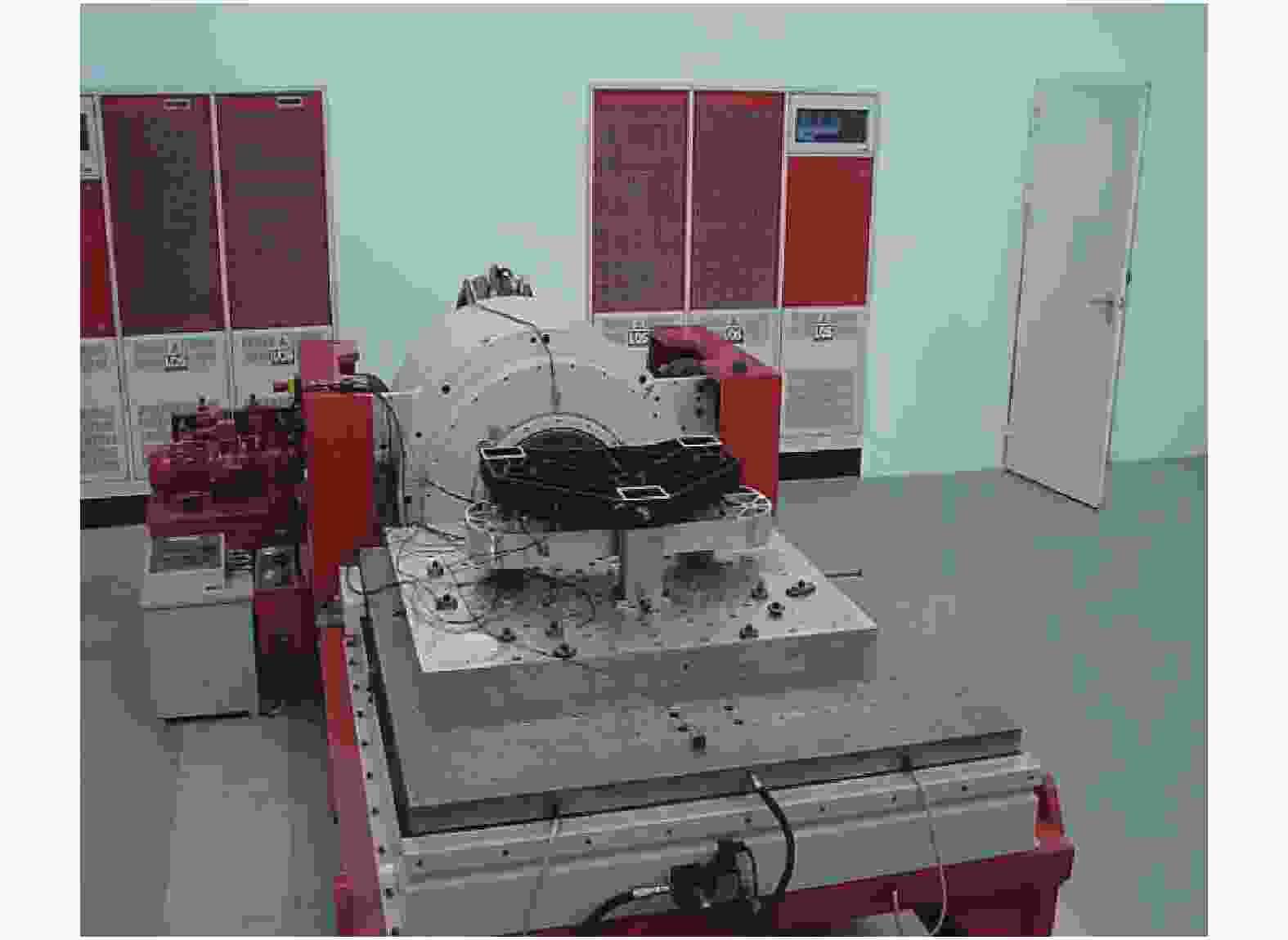
图 12 反射镜组件振动试验装置
Figure 12. Vibration test device of mirror assembly
具体试验流程为:首先对反射镜系统进行Y方向0.2 g特征频率扫描试验,获取反射镜系统在0~2 000 Hz频率范围内的频率特性;然后依次进行5~100 Hz低频正弦扫描试验和10~2 000 Hz范围的随机振动试验;最后再进行一次0.2 g特征频率扫描试验,考查振动过程反射镜组件是否发生频率漂移。
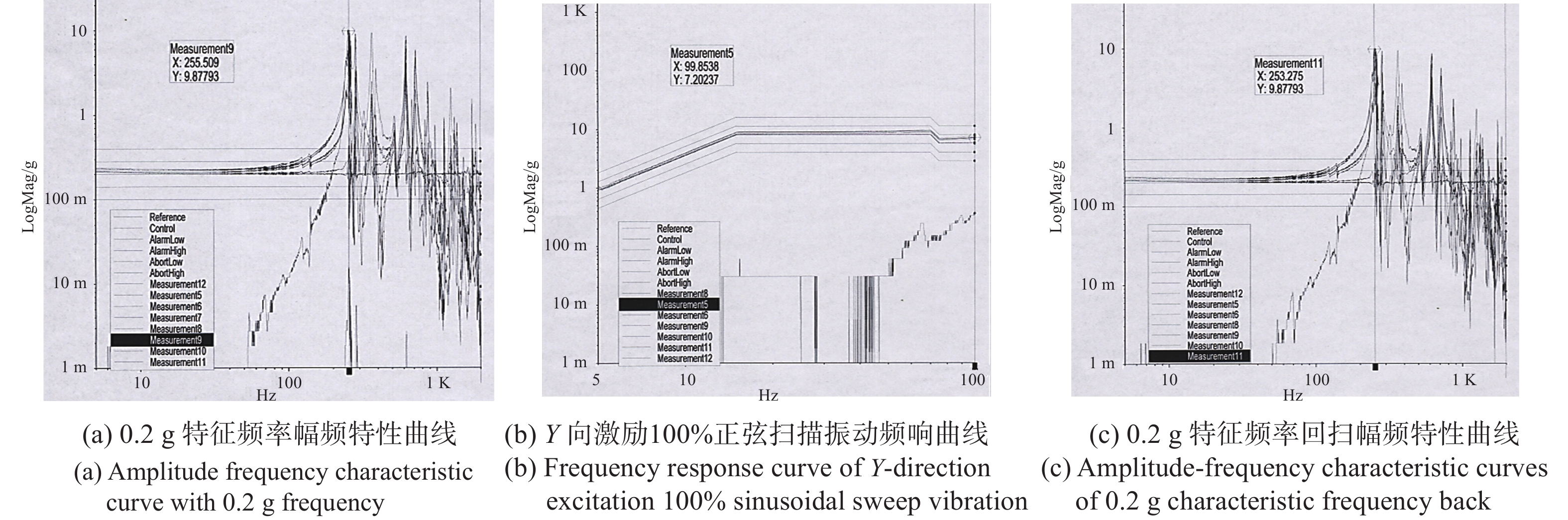
通过第一次0.2 g特征频率扫描试验,测得反射镜系统的一阶固有频率为255 Hz,试验结果如图13(a)所示,有限元分析误差为1.7%,满足分析精度要求,验证有限元分析的有效性。
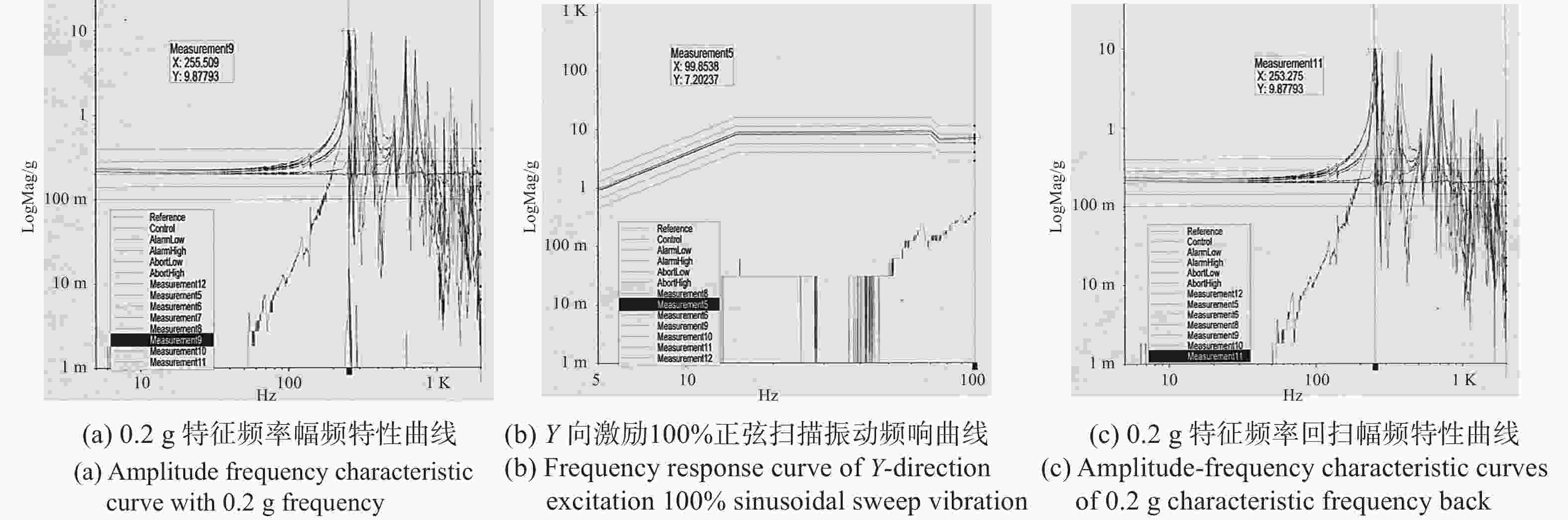
图 13 动力学试验结果曲线
Figure 13. Result curves of dynamic test
反射镜镜组件Y向激励100%正弦扫描振动试验结果如图13(b)所示,在5~100 Hz频段内加速度放大倍数与有限元分析结果基本一致,加速度放大倍数最大为1.3。0.2 g特征频率回扫结果如图13(c)所示,反射镜系统的一阶固有频率降为253 Hz,频率降幅0.8%,小于频率漂移不超过2%的要求,表明反射镜结构组件经过振动后并未发生松动或破坏。
-
文中从光机材料的选择、反射镜轻量化设计以及柔性支撑结构设计等方面开展研究,对某700 mm×249 mm口径长条形空间反射镜进行了详细地设计与分析。优化设计了反射镜的最佳支撑点分布方案,并提出了一种双轴柔性铰链支撑结构,解决了大口径长条形反射镜的结构轻量化设计难题。应用传统经验设计与有限元分析相结合的设计方法,确定了反射镜背部三点支撑位置及支撑结构在支撑孔中的安装深度。有限元分析和试验结果证明了反射镜组件整体设计合理。相较于同类大口径长条形反射镜结构设计,所提的设计方案在轻量化率方面有所提高,所采取的设计思路及方法对大口径长条形空间反射镜的轻量化设计具有一定的参考和借鉴意义。
Lightweight structural design of rectangular space mirror assembly
-
摘要: 针对某700 mm×249 mm长条形空间反射镜组件结构设计要求,对反射镜及其支撑结构进行了详细的光机结构设计。首先,从反射镜材料选择、径厚比、支撑方案及轻量化形式等角度出发,对反射镜进行结构设计。通过理论计算得到长条形反射镜的支撑点数。对支撑点位进行了优化,并探索了支撑孔位对反射镜自重变形的影响规律。其次,为满足反射镜组件的力、热环境适应性要求,设计了一种新型柔性支撑结构,并给出了柔性铰链薄弱环节对反射镜面形精度的影响;对支撑结构安装位置深度进行优化,给出反射镜面形精度关于支撑结构安装位置的变化曲线。然后,对反射镜组件进行了有限元分析,自重和5 ℃温升载荷工况下,反射镜面形精度峰谷(Peak Valley,PV)值和均方根(Root Mean Square,RMS)值最大分别达到58.2 nm和12.3 nm;反射镜组件一阶固有频率为259 Hz,低频正弦扫描振动条件下柔性支撑最大应力响应为138 MPa。最后,进行了动力学试验测试。测试结果表明,反射镜组件一阶固有频率为255 Hz,有限元分析误差为1.7%。分析和试验结果表明,反射镜组件结构设计合理,满足设计指标要求。Abstract: According to the structural design requirements of a 700 mm×249 mm rectangular space mirror assembly, the mirror and its support structure were designed in detail. First of all, from the perspectives of material selection, diameter-to-thickness ratio, support scheme and lightweight form, the structure design of the mirror was carried out. The number of support points of the rectangular mirror was obtained by theoretical calculation. The support points were optimized, and the influence of the support holes on the deformation of the mirror's weight was explored. Secondly, in order to meet the requirements of the force and thermal environment adaptability of the mirror assembly, a new type of flexible support structure was designed, and the influence of the weak link of the flexible hinge on the surface accuracy of the reflector was proposed; the position of the support structure was optimized, and the change rule of the reflector shape accuracy with respect to the position of the support structure was proposed. Then the finite element analysis of the mirror assembly was carried out. Under the load conditions of self-weight and 5 ℃ temperature rise, the maximum Peak Value (PV) and Root Mean Square (RMS) of the mirror surface reach 58.2 nm and 12.3 nm; the first-order natural frequency of the mirror assembly is 259 Hz, and the maximum stress response of the flexible support under the condition of low-frequency sinusoidal sweeping vibration is 138 MPa. Finally, a kinetic test was carried out. The test results show that the first-order natural frequency of the mirror assembly is 255 Hz, and the finite element analysis error is 1.7%. Analysis and test results show that the design of the mirror assembly is reasonable and meets the design index requirements.
-
Key words:
- rectangular mirror /
- lightweight /
- finite element analysis /
- dynamic test
-
图 5 柔性铰链t值对反射镜自重面形RMS的影响曲线
Figure 5. Curves of influence of t value of flexible hinge on RMS of self-weight surface of mirror
图 7 反射镜自重面形-支撑安装位置曲线
Figure 7. Curves of the self-weight surface of the mirror with respect to the support position
表 1 常用反射镜材料的性能和综合品质因数[9]
Table 1. Performance and quality factors of rational materials for mirror[9]
RB-SiC Si Be ULE Zerodur Al Fused silica Poisson’s ratio μ 0.2 0.278 0.08 0.17 0.24 0.33 0.17 Elastic modulus E/GPa 340 131 287 67 91 78 72 Density ρ/g·cm−3 3.05 2.33 1.85 2.21 2.53 2.68 2.19 Specific stiffness E/ρ/GN·m·g−1 111.50 56.22 155.14 30.32 35.97 29.10 32.88 Thermal conductivity λ/W·(m·K)−1 155 156 216 1.31 1.64 167 1.40 Thermal expansion coefficient α/10−6·K−1 2.50 2.60 11.40 0.03 0.05 23.6 0.50 Thermal stability λ/α/106 W·m−1 62 60 18.95 43.67 32.80 7.08 2.80 Integrated quality (E/ρ) · (λ/α) 6913 3373.2 2939.40 1324.07 1179.76 206.03 92.06  下载: 导出CSV
下载: 导出CSV
表 2 柔性铰链t值对反射镜组件的影响
Table 2. Influence of flexible hinge t value on mirror assembly
t/mm X-direction
self-weight
RMS/nmX-direction
self-weight
RMS/nmX-direction
self-weight
RMS/nmFundamental
frequency/Hz2 13.69 8.92 11.54 252.6 2.5 13.68 8.66 11.46 256.1 3 12.43 8.81 10.10 259.3 3.5 13.63 8.96 11.32 262.3 4 13.62 9.09 11.47 265.0
下载: 导出CSV
表 3 反射镜组件材料参数
Table 3. Material parameters of mirror assembly
Material Density ρ /
g·cm−3Elastic modulus
E /GPaPoisson’s
ratio μThermal expansion
coefficient
α/10−6·℃−1RB-SiC 3.05 340 0.2 2.5 4J32 8.1 150 0.28 2.5 TC4 4.44 109 0.34 8.9 SiC/Al 2.95 190 0.2 8.1
下载: 导出CSV
表 4 反射镜组件各向自重及温升分析结果
Table 4. Analysis results of the self-weight and temperature rise of the mirror assembly
Maximum
deformation/μmPV/
nmRMS/
nmX-direction 1 g gravity 1.53 58.2 12.3 Y-direction 1 g gravity 2.82 51.5 10.7 Z-direction 1 g gravity 3.06 55.2 11.8 5 ℃ uniform temperature rise 9.5 17.2 3.9 Y-direction 1 g gravity + 5 ℃ uniform temperature rise 9.23 33.3 6.8
下载: 导出CSV
表 5 反射镜组件前6阶模态分析结果
Table 5. Analysis results of the first six order mode shapes of mirror assembly
Order Frequency/Hz Mode shapes 1 259 Mirror moves in the Z direction 2 311 Mirror moves in the Y direction 3 335 Mirror rotates around the X axis 4 408 Mirror rotates around the Z axis 5 438 Mirror rotates around the Y axis 6 484 Mirror moves in the X direction
下载: 导出CSV
表 6 正弦振动激励条件
Table 6. Sine vibration excitation conditions
Frequency/Hz Vibration amplitude Incentive direction 5−15 8.89 mm 15−70 8 g X/Y/Z 70−75 5.7 g 75−100 5.7 g
下载: 导出CSV
-
[1] Li Xuyang, Ni Dongwei, Yang Mingyang, et al. Design of large field of view space camera optical system based on freeform surfaces [J]. Acta Photonica Sinica, 2018, 47(9): 142-150. (in Chinese) [2] Li Zhilai, Xu Hong, Guan Yingjun. Structural design of 1.5 m mirror subassenbly for space camera [J]. Optics and Precision Engineering, 2015, 23(6): 1635-1641. (in Chinese) doi: 10.3788/OPE.20152306.1635 [3] Zhu Junqing, Sha Wei, Chen Changzheng, et al. Position layout of rear three point mounting for space rectangular mirror [J]. Optics and Precision Engineering, 2015, 23(9): 2562-2569. (in Chinese) doi: 10.3788/OPE.20152309.2562 [4] 李叶文. 空间大尺寸长条反射镜轻量化及其柔性支撑技术研究[D]. 长春: 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2020. Li Yewen. Research on lightweighting and flexural mounting technology of space-borne large size rectangular mirror[D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics and Precision Machinery and Physics, Chinese Academy of Sciences), 2020. (in Chinese) [5] Breysse J, Castel D, Bougoin M. All-SiC telescope technology at EADS ASTRIUM: Big step forward for space optical payloads [C]//International Conference on Space Optics 2012, 2019. [6] Zhai Yan, Jiang Huilin, Mei Gui, et al. Material selection and design of beryllium-aluminum alloy mirror assembly for large-diameter space infrared camera [J]. Infrared and Laser Engineering, 2020, 49(6): 20190390. (in Chinese) [7] 相萌. 空间反射镜拓扑优化及其支撑技术研究[D]. 西安: 中国科学院研究生院(西安光学精密机械研究所), 2015. Xiang Meng. Research on the topology optimization and support of the space mirror[D]. Xi'an: University of Chinese Academy of Sciences (Xi'an Institute of Optics and Precision Machinery), 2015. (in Chinese) [8] 李梦庆. 长条形空间反射镜轻量化及消热化设计[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2015. Li Mengqing. Designs of lightweight and athermal for rectangular space mirror[D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics and Precision Machinery and Physics), 2015. (in Chinese) [9] San Bing, Li Jinglin, Sun Bin. Light-weight technology and its application of large-aperture mirror in space camera [J]. Infrared and Laser Engineering, 2015, 44(10): 3043-3048. (in Chinese) [10] Yoder P R. Opto-Mechanical Systems Design. 3rd ed [M]//Opto-Mechanical Systems Design. Third Edition, Boca Raton: CRC Press, Inc., 2005. [11] Friedman E. Photonics Rules of Thumb[M]. New York: McGraw Hill, 2003. [12] Vukobratovich D, Iraninejad B, Richard R M. Optimum shapes for lightweighted mirrors[C]//Proceedings of SPIE-The International Society for Optical Engineering, 1982, 332(12): 419-423. [13] Wang Kejun, Xuan Ming, Dong Jihong, et al. Design method of reflector component structure of space remote sensor [J]. Infrared and Laser Engineering, 2016, 45(11): 1113001. (in Chinese) [14] Xu Hong, Guan Yingjun. Structural design of 1 m diameter space mirror component of space camera [J]. Optics and Precision Engineering, 2013, 21(6): 1488-1495. (in Chinese) doi: 10.3788/OPE.20132106.1488 [15] Wu Yingfei, Zhou Zhaoying. Design of flexible hinges [J]. Engineering Mechanics, 2002, 19(6): 136-140. (in Chinese) [16] Zuo Xingyong, Liu Xiaoming. Calculation and analysis of rotational stiffness of three types of flexure hinges [J]. Chinese Journal of Scientific Instrument, 2006, 24(12): 1725-1728. (in Chinese) [17] Han Zengyao, Zou Yuanjie, Zhu Weihong, et al. Evolution of the spacecraft mechanical environment predication & test technology [J]. Scientia Sinica Physica, Mechanica & Astronomica, 2019, 49(2): 6-22. (in Chinese) [18] San Bing, Sun Baoyu. Dynamics analysis of long strip mirror of space remote sensor camera [J]. Optical Technique, 2006, 32(S1): 645-647, 650. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 364
- HTML全文浏览量: 95
- PDF下载量: 57
- 被引次数: 0








