







-
航空相机是民用测绘、军事侦察的有效手段,可对任务区域进行大范围地图制备和侦察情报生成,既可单独形成系统,又可作为天基成像的有效补充。在拍摄图像的同时获取图像,同时叠加上地理、水文、气象信息,并且准确捕获目标的形态、位置变化信息,这样才能形成有效情报,完成侦察或测绘任务。常见的功能有地理扫描、地理跟踪和地理定位[1],可见特定坐标系下的三坐标定位精度直接影响情报准确度和可信度[2]。
加拿大L-3WESCAM公司的EO/IR (Electronic optical/Infrared)传感器“MX”有效载荷系列(包含MX-10、MX-15、MX-20及MX-25series)可应用在机载、地基和海上环境等不同平台上,内置高精度IMU,可精确获取目标的地理位置信息。美国雷神公司MTS系列光电转塔,在MTS-B型号上首次满足了美国国防部/国家地理空间情报局的目标定位误差要求,在提高精度的同时将目标坐标直接实时传输至武器系统,有效降低了打击反应时间。“全球鹰”光电侦察载荷是一种具有广域搜索侦察与目标精确定位能力的长焦距、双波段高精度机载光电载荷,在飞行高度20 km的条件下,定位精度可达CEP (Circular probable error) 20 m。Goodrich ISR系统公司研制的CA-295双波相机[3]、集成惯性导航定位(INS/GPS)组合组件实现了高精度地理引导、目标定位以及图像拼接。
我国航空相机三坐标定位技术历经三代发展:第一代产品从2000年~2010年,利用机载导航设备的信息、相机运动信息进行三坐标定位计算,典型定位精度CEP 50 m@10 km。第二代产品从2010年至今,相机内部集成惯组/POS (Position and orientation system,位置姿态测量系统),典型定位精度为CEP 20 m/10 km。中国科学院长春光学精密机械与物理研究所某斜视成像航空相机,基座上集成高精度POS,在飞行高度17000 m、斜视75°范围内,定位精度为213 m (CEP)[4-5]。第三代产品采用内置惯性测量单元(Inertial Measure Unit,IMU)方案,自动定位定向,精度更高。
-
某航空多光谱相机由基座、扫描稳定平台、相机本体和POS组成。如图1所示,其扫描稳定平台外框架为滚动框架,内框架为俯仰框架。扫描稳定平台内框架上安装多光谱相机、光纤陀螺等负载,框架间转角由感应同步器测量。扫描稳定平台俯仰框架相对惯性空间的运动角速度由光纤陀螺测量,基座通过减振器与载机固连,基座上安装POS,提供载机位置和姿态信息基准。
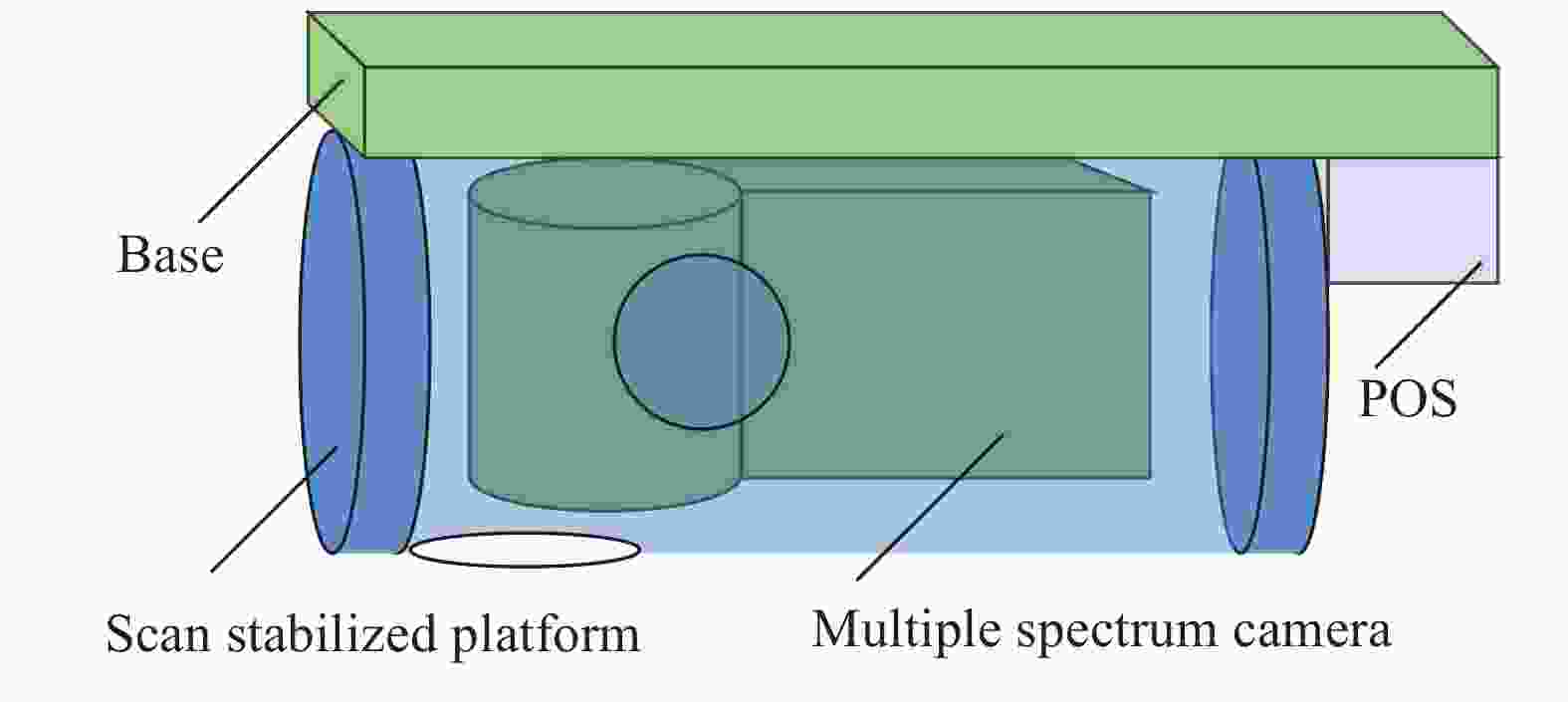
图 1 航空多光谱相机组成示意图
Figure 1. Schematic diagram of airborne multiple spectrum camera component
在无测距信息状态下,相机采用被动无源定位方法实现图像的三坐标定位,原理如图2所示。根据载体、目标在地面投影以及地心的三角形几何关系确定地理位置[6-7],计算流程如图3所示。

图 2 三坐标无源定位原理图
Figure 2. Principle diagram of three coordinate passive location
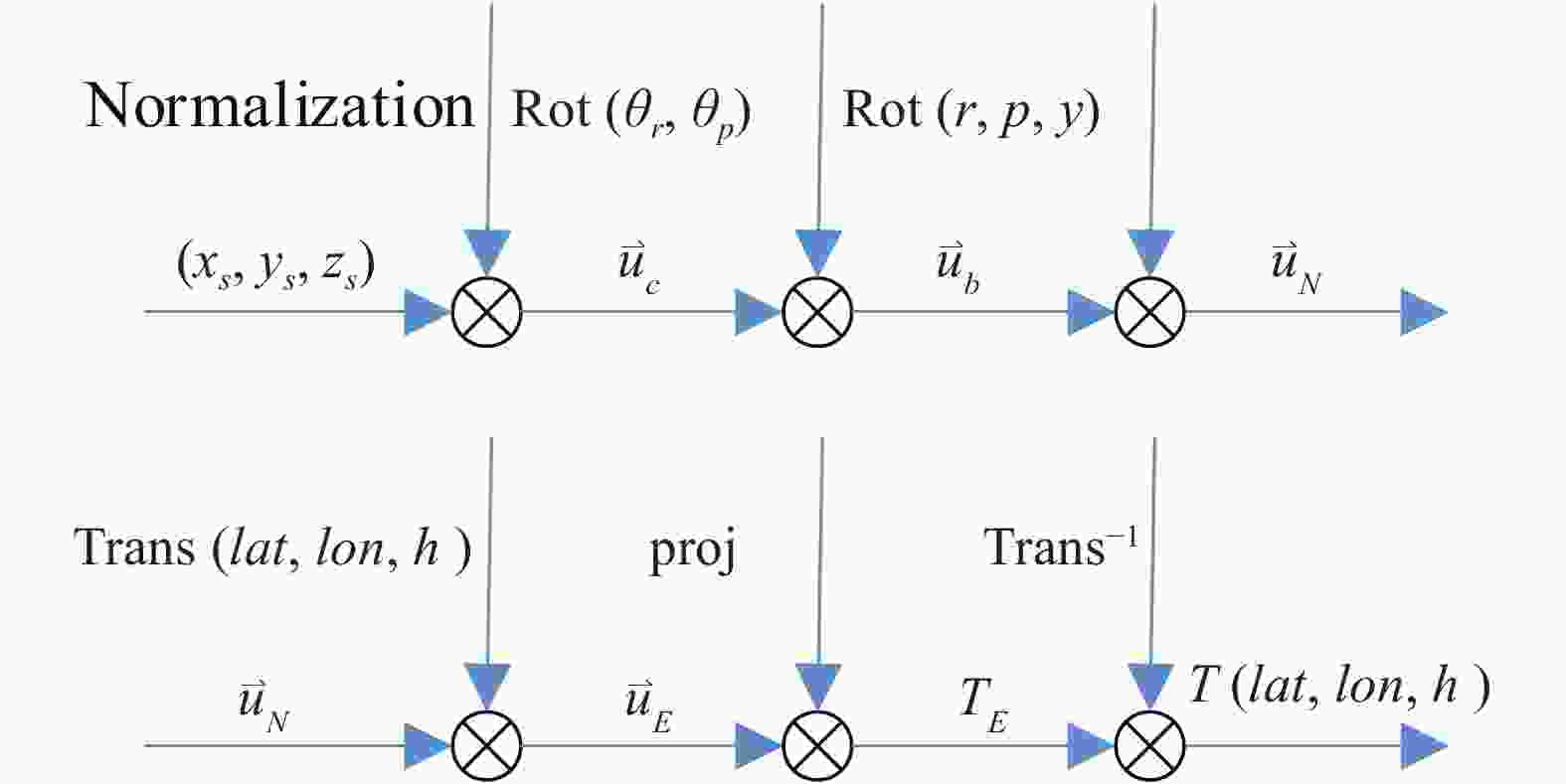
图 3 三坐标无源定位计算流程图
Figure 3. Three coordinate passive location calculation prcess
由图2~3可见,相机拍摄图像得到像空间坐标系下的坐标(xs,ys,zs),经过归一化后得到单位矢量
${\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {u} _c}$ ,再经过数次坐标变换,分别得到基座坐标系、地理坐标系以及大地直角坐标系下的单位矢量${\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {u} _b}$ 、${\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {u} _N}$ 、${\overset{\lower0.5em\hbox{$\smash{\scriptscriptstyle\rightharpoonup}$}} {u} _E}$ ,进一步向地球椭球投影,计算可得投影坐标${T_E}$ ,换算得到经纬度坐标$T{\rm{(}}lat,\;lon,\;h{\rm{)}}$ 。根据该计算流程可知,变换过程中的稳定平台角度(θr, θp)、载机姿态角(r, p, y)以及经纬高位置(lat, lon, h)精度决定了目标的三坐标定位精度。由于是远距离成像,角度误差引起的位置误差远远大于位置测量误差,角位置精度对定位精度起决定性作用。因此相机中与角度测量的相关技术,如高精度位姿动态测量技术、扫描稳定平台测角信号处理及辨识补偿、扫描型相机多维外方位元素标定技术以及异构多源传感时钟同步技术是机载相机的三坐标无源定位关键技术,如表1所示。
表 1 误差项与关键技术
Table 1. Error factor and key technology
Error factor Detail Key technology Base position orientation error Position error High precision position orientation measure
technologyOrientation error Stabilized platform angular error Angular rotation error Stabilized angular measurement process,
identification and compensationAngular sensor tilt Circuit electrical error Mounting error POS and stabilized platform mounting error Exterior orientation elements
of multiple spectrum
scannerStabilized platform and multiple spectrum camera mounting error Clock error Sensor measure delay Multisource clock synchronization of heterogeneous sensors Circuit delay Software acquire storage delay -
位置姿态测量系统是航空遥感的重要组成部分,用来敏感光学载荷基座的位置姿态信息[8]。
-
将闭环误差控制引入Kalman滤波器,将滤波估计出位置、速度误差,通过控制器实时反馈到输入端,抑制姿态角的误差振荡幅值,可有效提高系统姿态误差模型的准确度[9]。
-
POS系统中,卫星天线安装于飞行载体上,不随陀螺稳定平台而运动。IMU通常安装于载荷内部或载荷基座上,前者IMU会随陀螺稳定稳台运动,后者IMU随减振器运动而运动,二者均导致IMU与卫星天线间的杆臂参数实时变化。采集组合导航信息的同时,利用陀螺稳定平台的转动角度信息对杆臂进行重投影,实现动杆臂的补偿[10]。
-
选用角秒级感应同步器,并基于感应同步器μV级弱信号的放大解算设计高精度测角电路。在动态测角方案中,采用高保真正弦波激磁电源,减小电路时间常数,提高长期稳定性。由于感应电压信号弱,采用“一级放大+二级放大+滤波”的方式提高输出信号的信噪比,并对二路正余弦信号进行相位正交校正,提高测角解算精度。
电磁兼容性方面采用双绞屏蔽线传输,弱信号就近前置放大。电路设计上,数字地/模拟地信号地分开走线,单点连接。电源入口采用EMI滤波器抑制干扰,绘制印制电路时强信号、弱信号分开走线,保持较远距离,尽量扩大地的面积[11]。
-
感应同步器精度优于1″,制造误差可以忽略,测角误差主要影响因素为轴系回转误差、安装误差以及测角电路电气误差。
根据测角误差呈现周期性特点,利用谐波分析法对测角误差进行分析可知,一次谐波与二次谐波是测角误差的主要误差源,因此辨识一次谐波与二次谐波系数,利用分段线性化方法或谐波补偿方法对测角误差进行补偿,提高测角精度[12]。
补偿完成后反复通过环境试验验证测角指标稳定性、分阶段定期复测来验证测角指标的长期稳定性[13]。
-
相机的外方位元素需要进行标定与补偿,由于是扫描型多光谱相机,存在多维外方位元素参数,需逐一在扫描稳定平台零位条件下进行标定。引入立方镜[14],分别在相机基座、POS、相机附近安装立方镜,首先将各个传感器的坐标轴标定至立方镜上,然后在系统集成后对立方镜的安装姿态进行标定。逐级标定方式建立多光谱相机外方位元素,可有效降低对系统标定设备条件的要求。
根据安装关系,多光谱相机的外方位元素标定步骤为:(1)基准立方镜的安装标定;(2)相机与相机立方镜的标定;(3) POS与基准立方镜的标定;(4) POS立方镜与基准立方镜的标定;(5)相机立方镜与基准立方镜的标定。基准立方镜在装配过程中与稳定平台轴系水平,其标定方法见专利CN106323342B。立方镜间的标定方法采用多台经纬仪互瞄建站的方法,其测量方法见参考文献[15-16]。文中主要介绍步骤(2)、(3)。
-
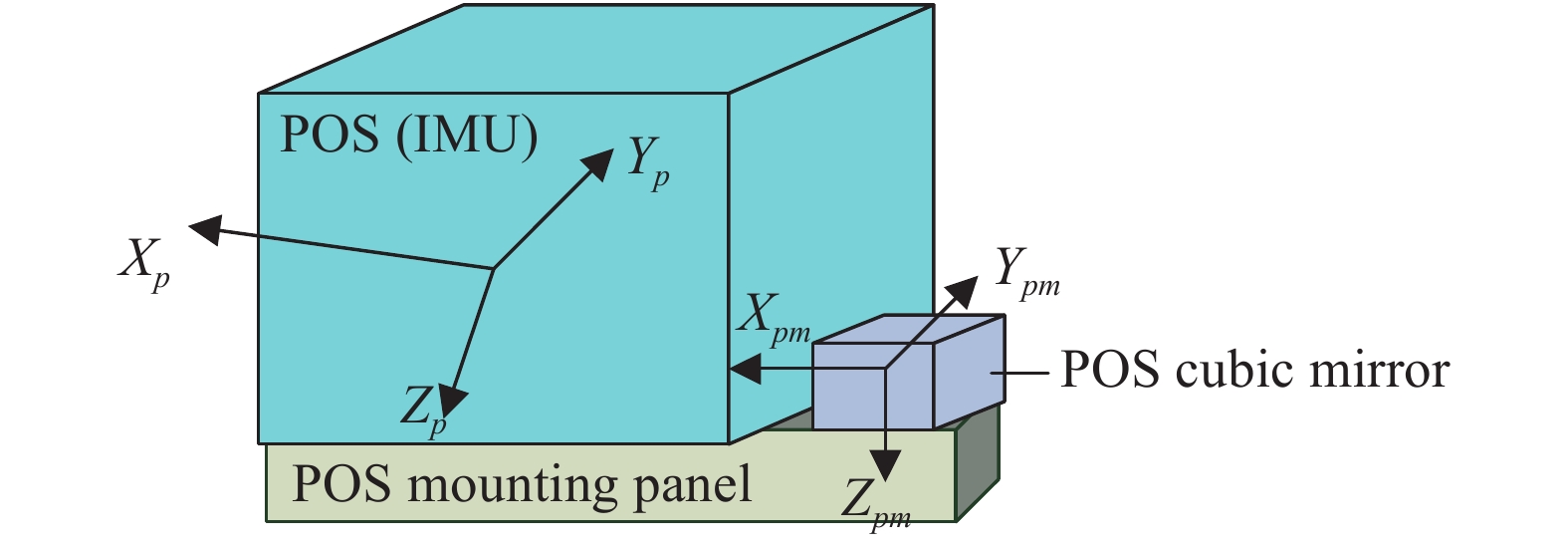
标定POS立方镜与POS输出坐标系关系利用0.5′′经纬仪、陀螺经纬仪及精密三轴转台组合测量来实现。标定方法如图4所示。

图 4 POS输出坐标系与POS立方镜坐标系
Figure 4. POS output coordinate and POS cubic mirror coordinate
将POS及安装板整体安装在三轴转台上,调节三轴转台角度使POS输出水平值为零,航向输出为北向零;采用0.5″电子经纬仪对POS立方镜水平轴向进行准直测量,记录电子经纬仪水平读数
${\alpha _p}$ 、${\;\beta _p}$ 。采用0.5″陀螺经纬仪对POS立方镜的X方向进行准直测量,记录陀螺经纬仪方位读数${\gamma _p}$ 。根据标定值,可得出POS立方镜坐标系与POS输出坐标系的旋转矩阵。 -
利用大口径多光谱平行光管与精密二维转台标定相机立方镜与相机的坐标系关系,调节转台的方位轴铅垂向下,俯仰轴位于水平状态。此时,转台轴系与平行光管轴系垂直。标定方案如下:
首先,安装多光谱相机至转台上,以当前被标定的谱段输出图像为准,分别调节相机的沿转台方位、俯仰轴系的安装姿态,使得靶标位于图像中心处;
其次,分别转动转台的方位、俯仰,调节相机的沿其光轴的安装姿态,使得靶标移动过程中始终位于图像的中心线上。
以上两步完成测试系统与被标定谱段的坐标系的对准。
-
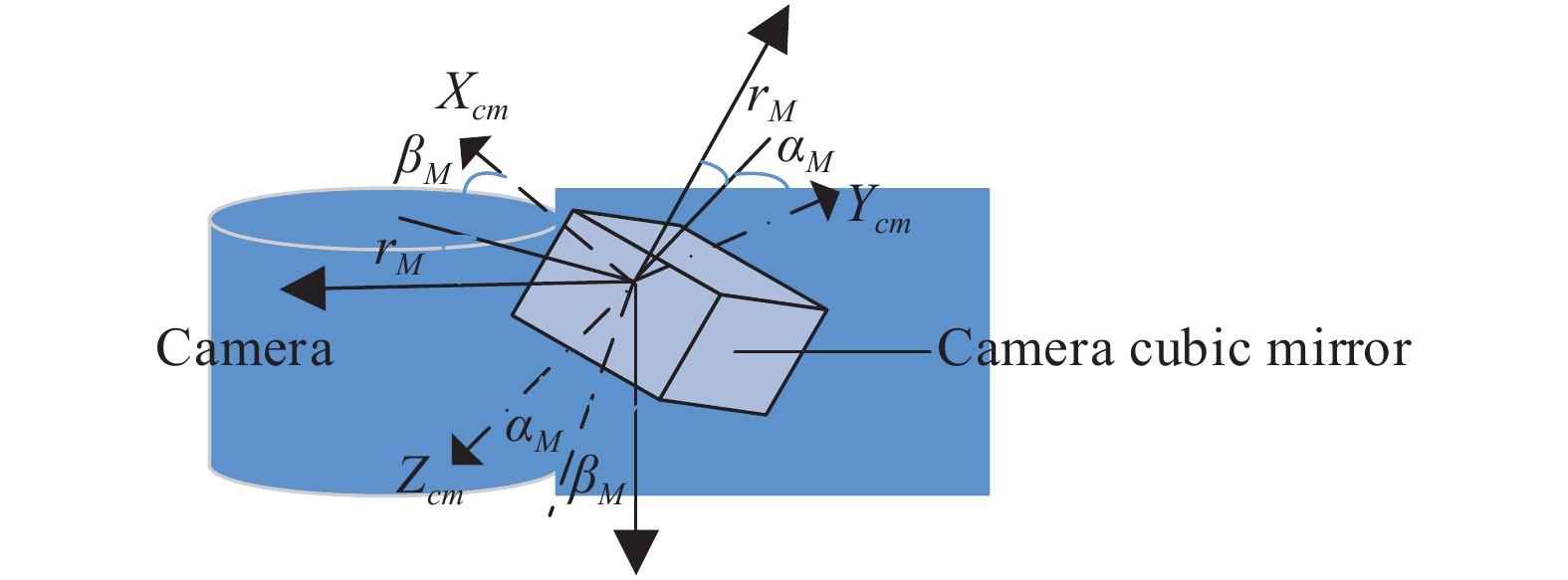
利用大口径多光谱平行光管对立方镜Xcm面进行准直测量,记录水平方向的角度
${\gamma _{M1}}$ 、垂直角度${\;\beta _{M1}}$ ;驱动二维转台俯仰轴转动90°,对立方镜的Ycm面进行准直测量,记录水平角度${a_{M1}}$ ,如图5所示。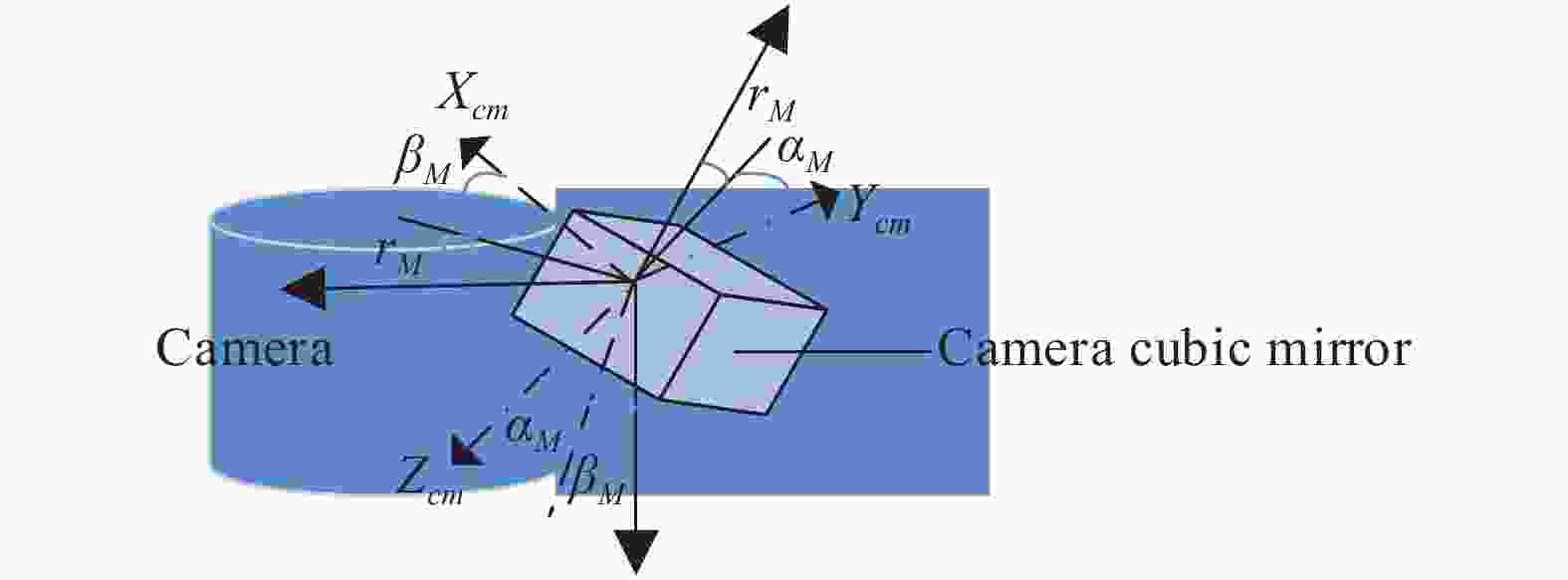
图 5 相机坐标系与相机立方镜坐标系
Figure 5. Camera coordinate and camera cubic mirror coordinate
由于是多个谱段,需对每一个谱段的坐标系进行标定、记录相机立方镜与相应谱段坐标系的姿态角(
${a_{Mi}}$ 、${\;\beta _{Mi}}$ 、${\gamma _{Mi}}$ ),i=1······N。根据标定获得的姿态角可建立多光谱相机的坐标系基准。 -
建立各个传感器与立方镜、立方镜的相互姿态关系后,可建立安装姿态旋转矩阵,采用基准逐级传递的方法实现内框架、外框架以及POS对准。通过POS、测角传感器以及多光谱相机的安装姿态角补偿可提高图像的定位精度。
-
多光谱相机传感器种类多、含多光谱图像、POS、感应同步器、光纤陀螺及内部电路等,异构多源时钟同步问题是影响相机几何精度的主要因素之一。受传感器输出延迟、传输延迟等因素的影响,图像数据与外方位元素数据存在同步误差,影响图像几何精度、形成观测误差[17]。
-
如图6所示,POS采集延迟为t11,多光谱图像数据输出延迟时间分别为
$t_{12}^1$ 、$t_{12}^2$ ······$t_{12}^N$ 。
图 6 数据传输链路
Figure 6. Data transfer chain
电路传输延迟:管控电路接收到POS数据存在传输延迟时间t21,图像输出控制电路、伺服控制电路接收到管控转发的POS数据存在传输延迟t22,所有数据均发送至图像数据记录设备,发送至图像记录时刻存在传输延迟时间t23。
软件采集数据延迟:采集POS数据及时钟存在延迟时间t31;采集多光谱图像输出数据,存在延迟时间t32;采集稳定平台运动数据,存在延迟时间t33。
其中传输时间延迟t21、t22、t23受波特率、数据量大小制约,由于民用测绘关注事后处理,传输延迟时间t23对数据时钟同步并不影响。实测采集延迟时间t31为几十μs量级,图像输出电路采集延迟时间t32为ns量级,伺服控制电路采集命令延迟t33为ms量级。可见系统的数据之间存在较大时延,约1 ms。
在30 (°)/s扫描速度下,产生的定位误差s=30/57.3×1=0.5 mrad,约为10个像元,因此需要进行时钟同步设计。
-
为实现数据对准,读取每一传感器数据时均同时读取本地时钟信息,因此只要实现各个传感器本地时钟信号的对准,即时钟同步,便可解决数据采集延迟问题,实现在后处理时的数据对准。采用各个本地时钟信号后,图像数据输出延迟t11,
$t_{12}^1$ 、$t_{12}^2$ ······$t_{12}^N$ 和采集延迟t31、t32、t33问题已经解决,进一步解决传输延迟t21、t22、t23的问题。采用POS输出的PPS秒脉冲信号时周期进行时钟同步,如图7所示。为了维持秒内时间的连续性,管控电路、图像输出电路及伺服控制电路根据各自晶振产生时间分辨率为ns级的时间计数值,当纳秒时间计数值等于整秒时,向秒计数值进位,计数器清零,秒计数值和纳秒计数值组合起来就是相机本地时间系统输出的完整时间值。

图 7 含时钟同步的数据传输链路
Figure 7. Data transfer path with clock synchronization
由表2可见,采用秒脉冲信号作为时钟同步信号后,传输延迟时间t21、t22影响消除。由于是后处理,t23不影响同步性能。此时时钟同步精度受制于1 s内晶振的稳定性以及各传感器输出延迟本身,多源传感器时钟同步精度优于μs级。
表 2 系统时钟及数据统计
Table 2. System clock and data index
Clock signal Data Clock signal accuracy PPS signal UTC time;
POS data<100 ns Management clock POS data and stabilized platform data <100 ns Servo circuit clock Fibro optic gyro <500 ns Industosyn Image output circuit Clock 1 Band 1 <10 ns …… …… Clock N Band N -
利用飞行试验的某谱段拼接影像对扫描仪三坐标定位精度进行验证,见参考文献[13],相邻条带影像相对定位精度优于1个像元(10″),有效验证了三坐标无源定位技术的有效性。
-
综上,采用如下措施解决航空多光谱相机的三坐标无源定位问题:
(1) 航空相机基座的高精度位姿动态测量。将闭环误差控制引入Kalman滤波器,提高系统姿态误差模型的准确度;利用稳定平台的转动角度信息实现动杆臂的补偿,提高定位精度;
(2)稳定平台测角信号处理及辨识补偿。优选高性能感应同步器,采用隔离、差分放大等措施降低电气噪声,并维持测角稳定性;深入分析测角误差特点,对测角误差分别进行补偿,提高测角精度;
(3) 扫描型相机多维外方位元素标定。建立以立方镜为核心的航空多光谱相机外方位元素标定方法,采用基准逐级传递的方法实现多光谱相机、稳定平台以及POS对准;
(4) 异构多源传感时钟同步。对多光谱相机的时钟流进行设计,利用PPS作为相机时钟同步信号,用PPS对相机运动控制时钟、多光谱相机时钟进行触发,利用事后处理解决数据传输延迟,实现POS数据、相机运动姿态数据和多光谱图像数据的精确对准。
随着研究成果的工程化应用,将有助于完善我国对地观测技术的总体布局。
Three coordinate passive location technology for airborne multiple spectrum camera
-
摘要: 航空多光谱相机采用焦平面探测成像系统,可在全天时、准全天候作业的条件下对机下进行大幅宽高分辨率成像探测。针对航空多光谱相机的三坐标无源定位问题,简介了相机组成及无测距信息辅助情况下的三坐标无源定位原理,梳理了航空多光谱相机的三坐标无源定位关键技术。通过载体的位置姿态精确测量,测角电路设计、测角误差标定与补偿,多传感器安装姿态标定,时间同步设计四大关键技术保证相机的定位精度。飞行试验结果表明,图像拼接精度优于10″,验证了技术方法有效。Abstract: A large FOV infrared multiple spectrum camera, which contains advance infrared focal plane, acquires large FOV & high resolution multiple spectrum image toward area below the flight vehicle. It takes images on a whole day and nearly a whole whether condition. The multiple spectrum camera system configuration was proposed. Its angular measurement, three coordinate passive location key technology and solution were described in detail. The angular measure electro-circuit & clock synchronization should be finely designed. When the system had been integrated, angular error calibration and compensation, multi-sensor installation attitude calibration were proposed to improve angular measure accuracy and location accuracy. Flight tests shows that image mosaicking accuracy is 10″ which means the technic is effective.
-
图 1 航空多光谱相机组成示意图
Figure 1. Schematic diagram of airborne multiple spectrum camera component
图 4 POS输出坐标系与POS立方镜坐标系
Figure 4. POS output coordinate and POS cubic mirror coordinate
表 1 误差项与关键技术
Table 1. Error factor and key technology
Error factor Detail Key technology Base position orientation error Position error High precision position orientation measure
technologyOrientation error Stabilized platform angular error Angular rotation error Stabilized angular measurement process,
identification and compensationAngular sensor tilt Circuit electrical error Mounting error POS and stabilized platform mounting error Exterior orientation elements
of multiple spectrum
scannerStabilized platform and multiple spectrum camera mounting error Clock error Sensor measure delay Multisource clock synchronization of heterogeneous sensors Circuit delay Software acquire storage delay  下载: 导出CSV
下载: 导出CSV
表 2 系统时钟及数据统计
Table 2. System clock and data index
Clock signal Data Clock signal accuracy PPS signal UTC time;
POS data<100 ns Management clock POS data and stabilized platform data <100 ns Servo circuit clock Fibro optic gyro <500 ns Industosyn Image output circuit Clock 1 Band 1 <10 ns …… …… Clock N Band N
下载: 导出CSV
-
[1] 李明锁. 惯性技术在光电探测技术中的应用[J]. 导航与控制, 2020, 19(4): 179-188. Li Mingsuo. Application of inertial technology in electro-optical detection technology [J]. Navigation and Control, 2020, 19(4): 179-188. (in Chinese) [2] Muncaster J, Collins G, Waltman J. Real-time automated detection, tracking, classification, and geolocation of dismounts using EO and IR FMV [C]//Geospatial Informatics, Fusion, and Motion Video Analytics, Proc of SPIE, 2015, 9473: 1-20. [3] 王岳, 李双喜, 王磊. 红外航空相机技术研究[J]. 激光与红外, 2017, 47(12): 1468-1472. doi: 10.3969/j.issn.1001-5078.2017.12.003 Wang Yue, Li Shuangxi, Wang Lei. Study on infrared aerial camera technology [J]. Laser & Infrared, 2017, 47(12): 1468-1472. (in Chinese) doi: 10.3969/j.issn.1001-5078.2017.12.003 [4] 乔川, 丁亚林, 许永森, 等. 大角度倾斜成像航空相机对地目标定[J]. 光学 精密工程, 2017, 25(7): 1714-1726. Qiao Chuan, Ding Yalin, Xu Yongsen, et al. Ground target geo-location using imageing aerial camera with large inclined angles [J]. Optics and Precision Engineering, 2017, 25(7): 1714-1726. (in Chinese) [5] 杜言鲁, 丁亚林, 许永森, 等. TDI-CCD全景式航空相机对地目标定位的算法[J]. 光学学报, 2017, 37(3): 0328003. doi: 10.3788/AOS201737.0328003 Du Yanlu, Ding Yalin, Xu Yongsen, et al. Geo-location algorithm for TDI-CCD aerial panoramic camera [J]. Acta Optica Sinica, 2017, 37(3): 0328003. (in Chinese) doi: 10.3788/AOS201737.0328003 [6] Held K J, Robinson B H. TIER II airborne EO sensor LOS control and image geolocation [C]//IEL Citation Aerospace Conference, IEEE Proceedings, 1997, 2: 377-405. [7] Wu Y A. EO target geolocation determination [C]//Proceedings of the 34th IEEE Conference on Decision and Control, 1995, 3: 2766-2771. [8] 薛武, 张永生, 王涛. 无人直升机面阵影像高精度对地定位[J]. 武汉大学学报, 2019, 44(2): 246-253. Xue Wu, Zhang Yongsheng, Wang Tao. High precision positioning of unmanned helicopter with area array images [J]. Geomatics and Information Science of Wuhan University, 2019, 44(2): 246-253. (in Chinese) [9] 周东灵, 林翰, 扈光锋. 基于陀螺稳定座架的移动成图系统活动杆臂补偿技术[J]. 导航定位与授时, 2016, 3(3): 32-36. Zhou Dongling, Lin Han, Hu Guangfeng. Varying arm compensation in MMS based on gyro-stabilized platform [J]. Navigation Positioning & Timing, 2016, 3(3): 32-36. (in Chinese) [10] 邱宏波, 周东灵, 李文耀, 等. 基于闭环误差控制器的高精度POS后处理算法[J]. 中国惯性技术学报, 2010, 18(6): 691-695. Qiu Hongbo, Zhou Dongling, Li Wenyao. High precision POS post-processing algorithm based on closed-loop error controller [J]. Journal of Chinese Inertial Technology, 2010, 18(6): 691-695. (in Chinese) [11] 谢伟成, 于晓洋. 鉴幅型高准确度动态测角系统设计[J]. 哈尔滨理工大学学报, 2004, 9(4): 5-8. doi: 10.3969/j.issn.1007-2683.2004.04.002 Xie Weicheng, Yu Xiaoyang. Amplitude discrimination type dynamic angular displacement measuring system with high precision [J]. Journal of Harbin University of Science and Technology, 2004, 9(4): 5-8. (in Chinese) doi: 10.3969/j.issn.1007-2683.2004.04.002 [12] 潘文贵, 付晶, 朱钰, 等. 感应同步器测角系统的电路设计与软件补偿[J]. 科学技术与工程, 2012, 12(22): 5484-5488. doi: 10.3969/j.issn.1671-1815.2012.22.014 Pan Wengui, Fu Jing, Zhu Yu, et al. Circuit design and software compensation of inductosyn angle measuring system [J]. Science Technology and Engineering, 2012, 12(22): 5484-5488. (in Chinese) doi: 10.3969/j.issn.1671-1815.2012.22.014 [13] 董浩, 孙拓, 吴丽娜. 一种机载红外光谱相机的角位置误差补偿技术[J]. 红外与激光工程, 2019, 48(10): 1013007. doi: 10.3788/IRLA201948.1013007 Dong Hao, Sun Tuo, Wu Lina. An angular error compensation technology for airborne infrared spectral camera [J]. Infrared and Laser Engineering, 2019, 48(10): 1013007. (in Chinese) doi: 10.3788/IRLA201948.1013007 [14] 贾馨, 范龙飞, 苗洋, 等. 九谱段离轴长线阵相机视轴建模分析[J]. 红外与激光工程, 2019, 48(4): 0417007. doi: 10.3788/IRLA201948.0417007 Jia Xin, Fan Longfei, Miao Yang, et al. Modeling analysis of axis angle for nine-spectrum off-axis large-aperture assay camera [J]. Infrared and Laser Engineering, 2019, 48(4): 0417007. (in Chinese) doi: 10.3788/IRLA201948.0417007 [15] 黄桂平, 钦桂勤, 马开锋. 星载立体测绘相机立方镜间姿态标定[J]. 宇航计测技术, 2013, 33(4): 17-20. doi: 10.3969/j.issn.1000-7202.2013.04.005 Huang Guiping, Qin Guiqin, Ma Kaifeng. Attitude calibration on three-line array CCD camera of space stereo mapping [J]. Journal of Astronautic Metrology and Measurement, 2013, 33(4): 17-20. (in Chinese) doi: 10.3969/j.issn.1000-7202.2013.04.005 [16] 邢辉, 焦文春, 王昀. 红外低温相机视轴引出方法[J]. 光学学报, 2013, 33(1): 01120008. Xing Hui, Jiao Wenchun, Wang Jun. Method to elicit the boresight of infrared cryogenic camera [J]. Acta Optica Sinica, 2013, 33(1): 01120008. (in Chinese) [17] 李森, 王力, 李广云, 等. 激光扫描仪时间同步的实现研究[J]. 测绘科学, 2014, 39(9): 138-140. Li Sen, Wang Li, Li Guangyun, et al. Time synchronization of laser scaner [J]. Science of Surveying and Mapping, 2014, 39(9): 138-140. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 688
- HTML全文浏览量: 195
- PDF下载量: 45
- 被引次数: 0






















