











-
21世纪是海洋的世纪,海洋事关国家安全和长远发展,我国将建设海洋强国纳入国家战略中,近年来又陆续颁布了《全国科技兴海规划(2015~2020)》、《民用空间基础设施中长期发展规划(2015~2025)》,标志着海洋开发与利用上升到前所未有的战略高度。卫星海洋遥感技术已在海洋资源、环境、减灾和科学研究等领域发挥了不可替代的重要作用,大力发展海洋卫星是落实强国战略、建设和完善国家空间基础设施的重要举措。
我国历来非常重视海洋卫星遥感技术及卫星海洋应用的发展。经过多年的建设,已先后研制、发射海洋系列卫星和云海系列卫星,初步建立海洋水色、海洋动环境、海洋监视监测系统,在卫星海洋应用上取得了大量成果和显著进展[1]。
现有卫星海洋遥感常用的手段包括海洋水色仪、微波辐射计、雷达高度计、SAR等,尽管可以提供全球范围的海洋环境遥感产品、但主要是SST、风速、海面粗糙度等海洋表面特性的信息探测,即使可见光观测可以获得与浮游生物浓度相关的海洋水色变化,也只能探测10 m左右的深度,无法探测海洋次表层水体(100 m以上)的内部结构,对多维信息的获取能力有限[2-3]。
相对于被动光学遥感或微波探测而言,海洋激光雷达遥感技术拥有非常高的垂直距离分辨率,可以获取海洋光学参数剖面、海水温度剖面、海洋动力学特征、浅海水深等信息,与被动遥感相结合可以构成地球三维立体观测能力。星载海洋激光雷达也可对混合层叶绿素、悬移质等要素进行探测,能在三维空间尺度上监测浮游植物,并提供一种亚-中尺度生物-物理耦合进行系统观察的方法[4-7],这对全球碳循环以及上层海洋动力过程的理解具有重要意义,可以增强对海洋信息的获取能力。
发展高精度海洋激光雷达探测卫星,能够准确获取我国以及全球海洋区域次表层参数信息,实现更大范围、更深层次、更高时空分辨率、更综合的海洋物理化学以及生物参数的观测,完成由区域到全球、表层到次表层,甚至深层变化遥感探测能力的跨越,从而填补技术空白,增强我国自主海洋卫星遥感在国际上的影响力。
-
激光雷达作为一种有效的主动遥感系统,通过激光穿过传输介质产生的延时、频移,以及激光导致介质引起的吸收、弹性散射、拉曼散射、荧光等信号进行遥测,具备时间分辨测量能力,并通过分析回波信号的光谱、波形、强度、频移等特性,能够获得一定深度探测剖面参数或目标的有关信息,是卫星海洋遥感的重要发展方向[8]。
-
美国是世界上最早开展海洋激光测深技术研究的国家,1968年,美国Syracuse大学的Hickman和Hogg建立了世界上第一个激光海洋测深系统[8],首次阐述了激光水下测深测量技术的可行性,初步建立了激光探测技术的理论基础;此后,美国海军研制成功PLADS激光测深系统,随后NASA研制成功ALB激光测深系统,并于1971年至1974年进行了试验,在圆盘透明度为5 Ms时,测深能力达10 m左右,20世纪70年代末NASA又研制成功具有扫描和高速数据记录功能的AOL水文雷达,采用400 Hz的低峰值功率激光器,绘制出了水深小于10 m的海底地貌。
20世纪80年代,美国海军采用500 Hz的染料激光器,配合全球定位系统GPS,1 GHz的采样率AD卡进行信号处理,处理结果采用彩色编码显示,处理速度5 MIPS,比实际要求的实时处理速度少一两个数量级,随后美国采用了新的计算机系统,将处理速度提高到300 MIPS,以保证任何可行的算法都可以实现。同期,加拿大的CHS组织开发了功能先进的LASERN500测深系统,采用红外和蓝绿激光共同扫描,500 MHz采样率。该系统在衰减系数0.3 m−1时,测深能力达40 m。前苏联于1991年研制成功GOL系统。
20世纪90年代,机载激光测深系统进入实用阶段,美国、澳大利亚、瑞典等都报道了自己的实用型测深系统。这一时期的系统普遍增加了GPS定位和定高功能。1989年到1993年澳大利亚国防部委托Vision系统公司对LADS进行了重新设计和改进,自1993年以来,澳大利亚海军一直利用这套系统进行海道测量,测量面积已超过6×104 km。1995年,Vision公司又投资二千四百万澳元研制新的机载激光测深系统,并命名为LADS MK Ⅱ。该系统于1998年9月开始使用,它的效率是传统声纳测量方法的20倍,但所用经费只有传统方法的20%,而且其测量精度能达到《国际海道测量标准》中一级精度要求,测量速率900 Hz,测深范围可达70 m,扫面宽度240 m。
1993年,加拿大的Optech公司为美国军事工程师协会生产的SHOALS激光测深系统,采用200 Hz的固体激光器,绿光和红外共同扫描方式,采用的第3个光通道,利用674 nm红光的拉曼后向散射进行海面检测以及海面、陆地的区分,拉曼回波全部来自水体的后向散射,没有海面的反射成分,保证了精确的海面定位。1994年,该公司为瑞典海军海道测量部研制生产了HAWK EYE测深系统,用于海道测量和水下目标探测,该系统采样率1 GHz,绿光检测用APD代替PMT,回波提取能力强扫描精度提高,体积减少。
先后经过20余年的发展,目前SHOALS(Scanned Hydrographic Operational Airborne Lidar Survey)系统,是国外典型的海洋探测机载激光雷达系统,也是界上最为先进的激光雷达海洋探测系统。具有先进的GPS定位和定高功能,目前最新一代的系统采用重频为1 kHz和10 kHz的Nd:YAG激光器,绿光和红光共线扫描方式,具有独立的红外和拉曼通道,有5个接收通道,3个用于探测海水界面,2个用于探测海底,增加的647 nm的拉曼后向散射通道进行海面检测以及海面、陆地的区分。该系统出色地完成50多个课题的海洋探测任务,其中佛罗里达新航道宾夕法尼亚的普利切岛和墨西哥育卡滩海域的探测任务,以及与超光谱探测设备进行复合,成功探测并识别到了海底沙子、珊瑚、泥浆、不同的水藻等物质,更加说明了SHOALS系统的探测能力优于传统探测方法。目前国外典型记载海洋激光雷达技术指标如表1所示。
Parameters Hawkeye Ⅲ(Leica) CZMIL (Optech) LADS HD (Fugro) Instrument image 


Measuring object Ocean & Land Ocean & Land Ocean Technique Multichannel simulation probe Multichannel simulation probe Simulation probe Wavelength 532 nm,1064 nm & 1550 nm 532 nm & 1064 nm 532 nm & 1064 nm Investigation depth 0.15-50 m 0.15-50 m 0.15-50 m Detecting precision 0.36 m (50 m) 0.36 m (50 m) 0.36 m (50 m) Detecting precision 10 kHz (Ocean) 500 kHz (Land) 10 kHz (Ocean) 70 kHz (Land) 3 kHz (Ocean) Aspect angle 40° 40° 30° Grid density 0.8 m×0.8 m (Ocean) 0.1 m×0.1 m (Land) 0.8 m×0.8 m (Ocean) 0.3 m×0.3 m (Land) 1.4 m×1.4 m (Ocean) SHOALS系统目前最新的CZMIL激光雷达(Coastal Zone Imaging and Mapping LIDAR),集成了数字摄像机、多光谱成像仪以及综合了测深及测绘激光雷达于一体,配备有数据获取及数据处理软件,具备优异的海洋测绘、地面测绘及目标识别的性能。该激光雷达扫描系统区别于传统的SHOALS系统中旋转反射镜的方式,创新性使用旋转的菲涅耳棱镜使激光束转向。CZMIL激光雷达光学系统中一个大视场进行深海探测,7个小视场进行测绘。7个小视场组成的大视场可用于中等深度的海水探测[9-10]。
-
我国对于机载激光测深系统的研究始于20世纪90年代,当时中国海洋大学、中国科学院上海光学精密机械研究所、华中科技大学、中国科学院西安光学机所等单位进行了有关机载、船载激光海底地形地貌测绘的预研工作,提出了初步方案,进行了必要的试验工作,原理上证明了激光测深在我国沿岸海域是可行的[9]。
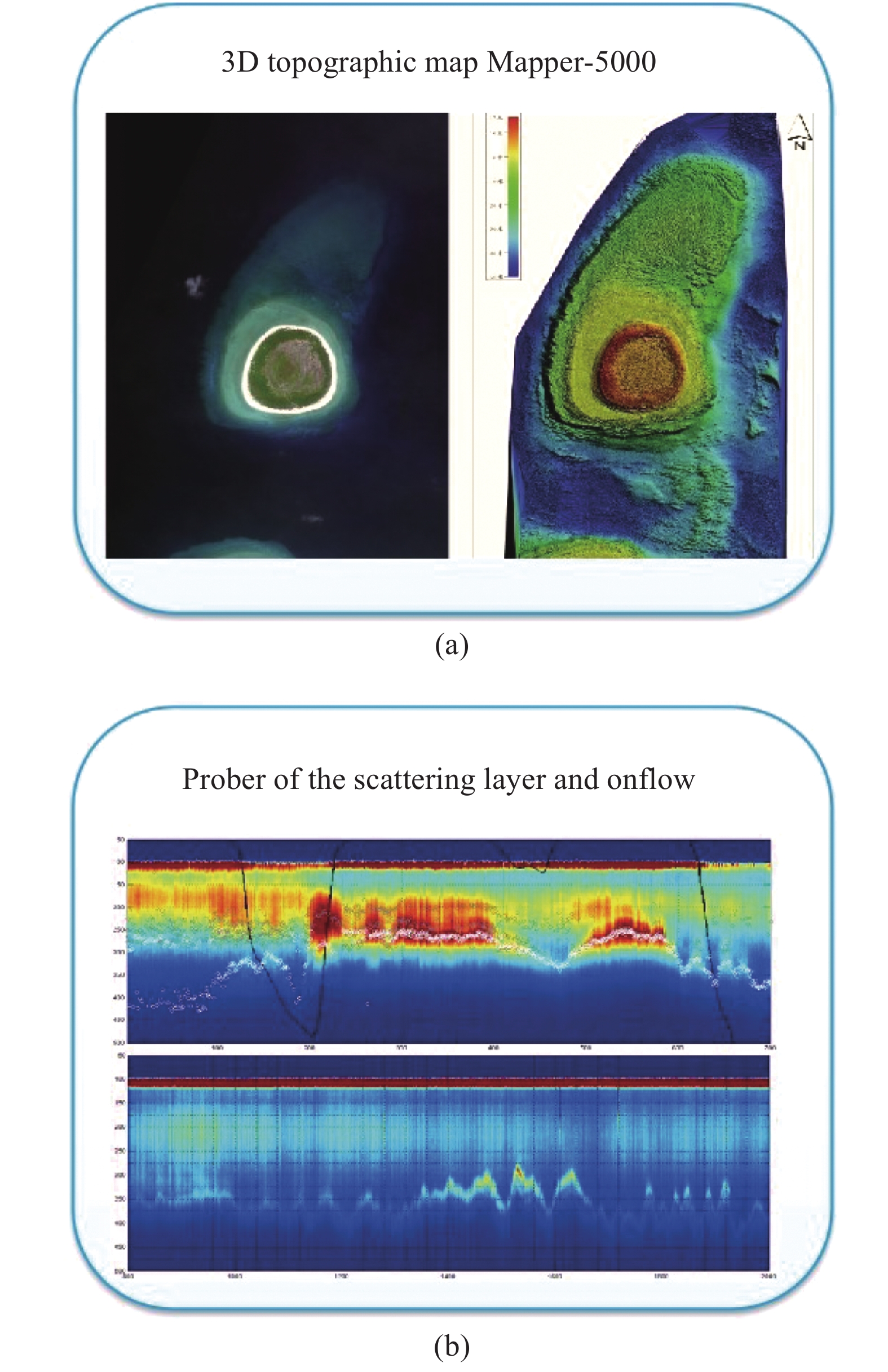
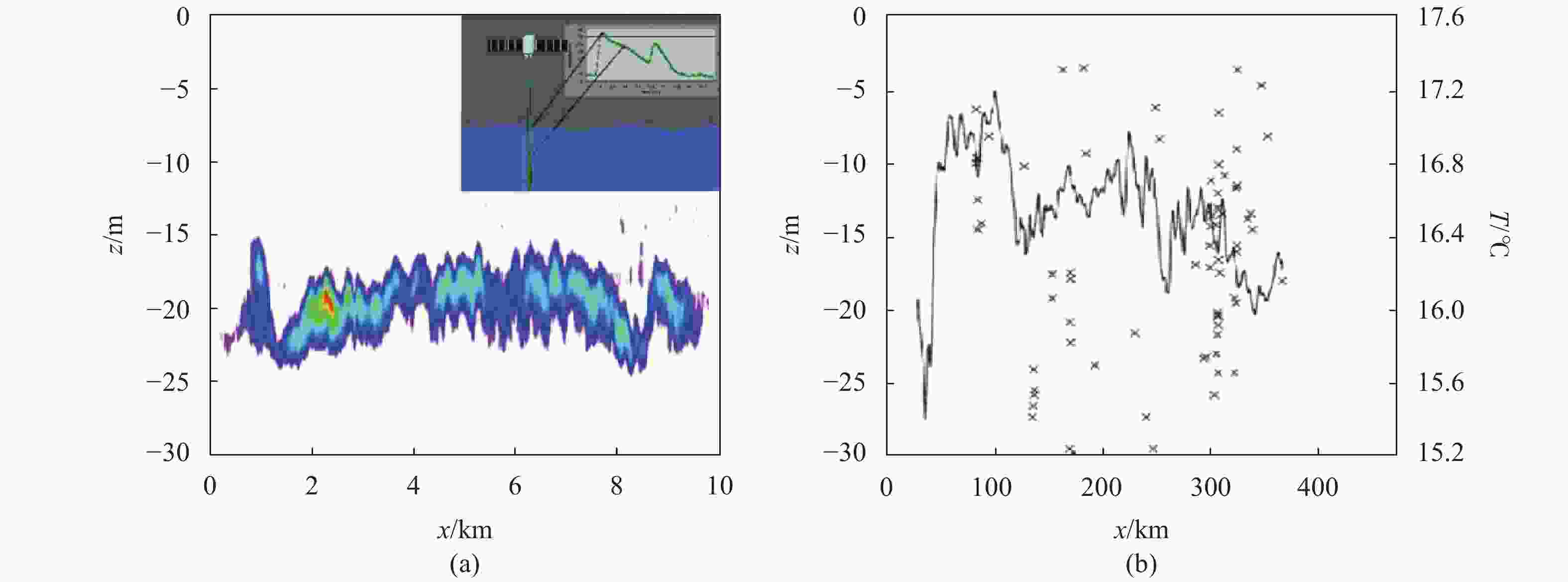
中国科学院上海光学精密机械研究在中科院重大项目的支持下,对激光测深项目进行了多年的研究,取得了很多关键技术的突破(见图1)。“九五”期间,研制成功我国第一台机载海洋测深激光系统,LADM-1 (第一代),系统采用重复频率为200 Hz的全固态激光器。在海水漫衰减系数为0.1 m−1时,水深测量能力达到50 m (见表2)。“十五”期间,与海军测绘研究所共同的研制的LADM-2 (第二代)机载激光测深系统,将技术指标进一步提高,并进行了海上试验,取得了比较满意的结果,系统具备扫描、高速数据采集存储、GPS精确定位功能(见表2)。该系统的研制成功,标志着我国的机载海洋测量技术步入世界先进国家行列[9, 11]2015年,Mapper-5000机载双频激光雷达( 第三代)工程样机研制成功, 在南海完成了3个架次的机载飞行试验,获得了海陆一体化的三维地形数据,新增的陆地通道提升了陆地测点密度(见表3),多通道接收和数据处理技术提升了浅水探测能力和海陆分类精度,并获得了海洋光学剖面信息(见图2)。

表 2 上海光学精密机械研究所研制三代机载激光雷达技术参数
Table 2. Parameters of the third airborne lidar system by Shanghai Institute of Optics and Fine Mechanics
Parameters LADM-Ⅰ LADM-Ⅱ Mapper-5000 Wavelength 1 064 nm & 532 nm 1 064 nm & 532 nm 1 550 nm,1 064 nm & 532 nm Repetition frequency 200 Hz 1 kHz 5 kHz Grid density 5 m×5 m 2.5 m×2.5 m 1 m×1 m (Ocean) 0.25 m×0.25 m (Land) Weight 300 kg 350 kg 98 kg 表 3 机载Mapper-5000 (第三代)双频激光雷达海陆技术指标
Table 3. Parameters of the airborne Mapper-5000 (the third) double frequency lidar
Parameters Ocean Land Wavelength 1 064 nm & 532 nm 1 550 nm Repetition frequency 5 kHz 100-400 kHz Grid density 1 m×1 m 0.25 m×0.25 m Scanned area ±15° ±30° Flight altitude 100-1 500 m Vertical accuracy 0.12 m Investigation depth 0.25-51 m Detecting precision 0.23 m Position accuracy 0.26 m Power dissipation 1.2 kW 
中国海洋大学在国家科技攻关、863计划、自然科学基金等支持下,也先后自主研制完成多个海洋、海气边界层探测激光雷达系统,包括船载布里渊散射激光雷达、激光叶绿素荧光雷达、机载激光荧光雷达、机载海面溢油监测激光雷达等,研制了首个机载海洋生物与溢油监测荧光激光雷达、我国第一套高光谱分辨率激光雷达。此外,哈尔滨工业大学、武汉大学、北京理工大学、浙江大学等单位也做了很多相关工作[9]。
近年来,国际上机载海洋测深系统逐步由军用转向民用,向多功能机载海洋光学雷达发展,加强了激光在海水传输中散射波形的研究,包含了诸如海水成分、叶绿素、泥沙含量、鱼群和浮游生物等更多宝贵的信息获取[4-8]。可以预见,未来的机载激光海洋遥感手段将使人类对海洋有着更深入、更本质的了解。
-
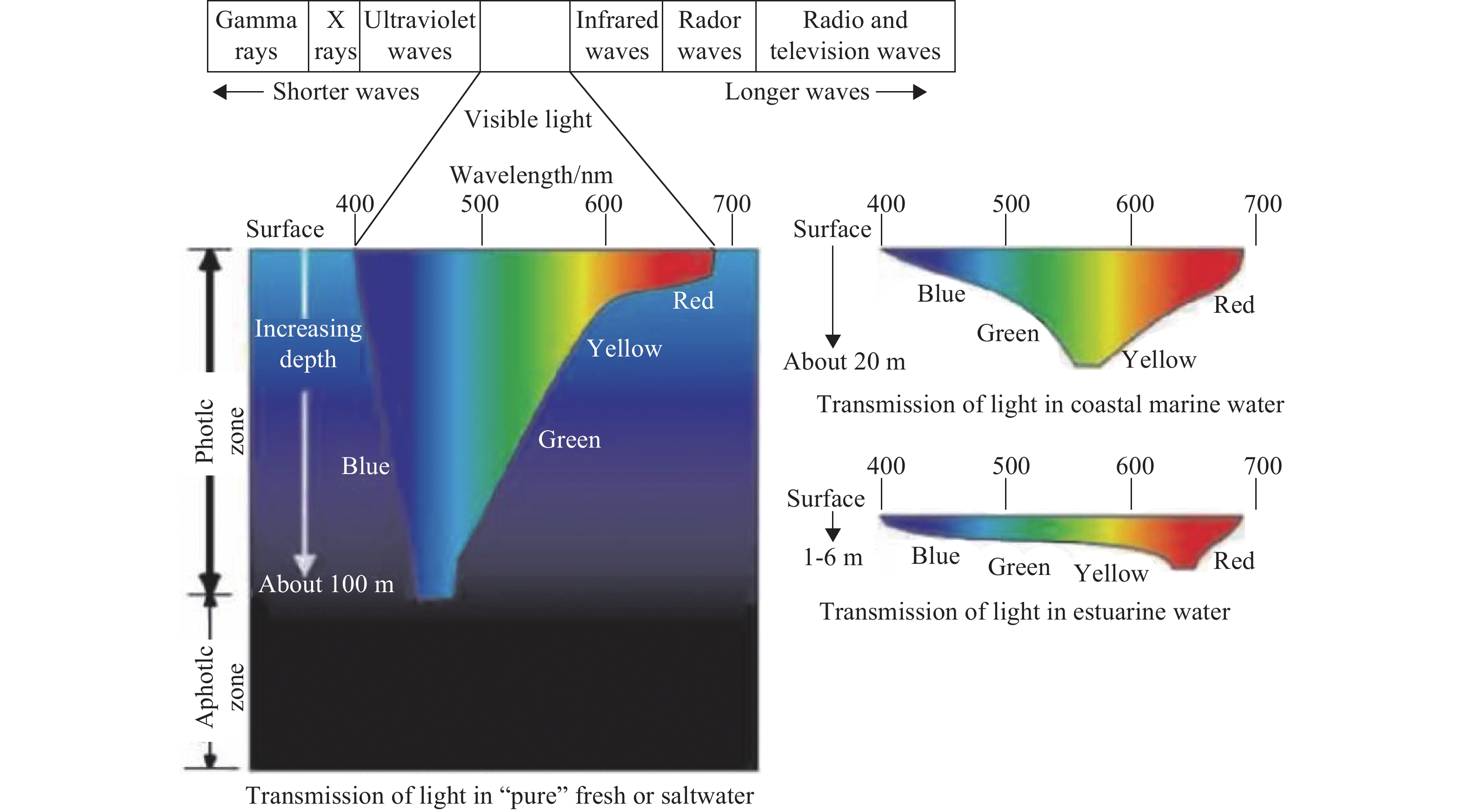
海洋激光探测与其他激光探测最重要的区别在于激光与纯水的相互作用。1939~1974年间,Clarke、James、Sullivan和Morel等完成了实测透射率和衰减系[4, 7],以及纯水的理论散射系数。这些结果可以作为纯水的衰减参考依据,观测的结果表明蓝光具有更大的穿透性,而红光衰减最强。波段从580~600 nm,透射率出现显著下降。衰减率与散射率的比较,证明衰减主要是吸收效应。由于选择性吸收,水实质上相当于一个吸收最大值出现在750~760 nm的蓝光单色仪。
海水中的悬浮粒子、浮游生物和溶解有机物对光学信道的散射有强烈的影响,1975年J.D.Jackson给出了在纯水分子吸收影响下的光谱衰减曲线(图3)[12],结果表明纯水的最小吸收波段在460~490 nm的蓝绿波段。1976年,N.G.Jerlov借助于高太阳高度时下行辐照度,提出了一套将大洋水进行分类的方案,用于区别不同类型的水。根据实测数据,按照海水的吸收,散射特性将水质划分为JerlovⅠ、ⅠA、ⅠB、ⅠC、Ⅱ、Ⅲ、3C、5C、7C、9C十类水质[13]。P.Lacovara在2008年给出了在悬浮颗粒、浮游生物和溶解有机物影响下的光谱衰减曲线,这些物质在蓝绿波段造成的散射最小[12-13]。

总体来说,海洋激光探测与其他激光探测的特点如表4所示,主要区别:
表 4 星载海洋探测激光雷达特点
Table 4. Features of spaceborne ocean lidar
Target of detection Theory Repeated frequency Single pulse energy SNR Frequency stability Forest Height measurement High Lesser Esser General Mapping Height measurement Highest Lesser Esser General Aerosol Back scattering General Biggish Biggish General Atmospheric composition Differential absorption General Biggish Biggish Biggish Wind field Doppler General Biggish Biggish Maximum Ocean Back scattering General Maximum Maximum Maximum (1)采用高峰值功率脉冲激光器,激光波长具有更好的海水透过率和更低的背景光,提升探测深度和抗干扰能力;
(2)采用扫描方式而不是阵列,能量集中用于提升探测深度和探测信噪比;
(3)采用高灵敏度模拟探测和全波形采样技术,需要连续剖面和波形信息;
(4)采用直接探测和间接探测综合的方法,激光海水的穿透深度受限,发展多技术综合方法能够实现更高的性能。
-
从1994年的空间激光雷达LITE (Lidar In-Space Technology Exeriment)试验、2002年的地球科学激光测高ICESat-1 (Ice, Cloud and Land Elevation Satellite)系统、2006年的云与气溶胶偏振测量激光雷达CALIPSO (Cloud-Aerosols Lidar and Infrared Pathfinder Satellite Observations),以及2018年全球风场测量激光雷达AEOLUS与极地冰川、冰盖、植被测绘激光雷达ICESat-2 (Ice, Cloud and Land Elevation Satellite 2)。欧美等国已积累了星载激光雷达的经验,为星载海洋激光雷达的方案设计、探测原理、数据反演提供了重要参考(见图4)。
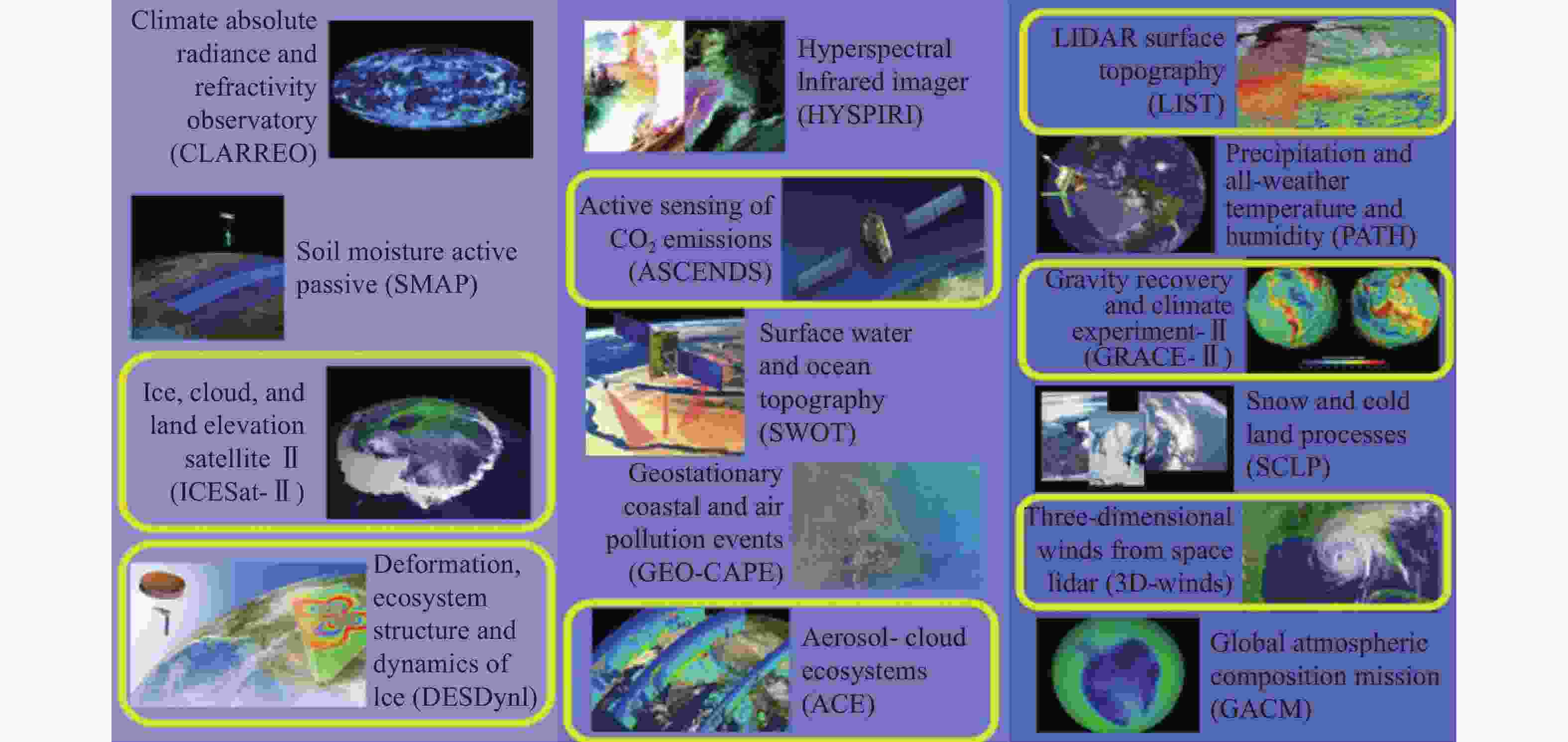
图 4 NASA地球科学十年观测计划
Figure 4. Plan of NASA Earth science decadal survey
回顾目前发射的星载激光雷达,LITE作为世界首个星载大气探测激光雷达,虽然只工作了11天,但证明了星载激光雷达从空间向地球大气进行探测的能力,同时也向大气科学研究者展示了星载激光雷达能提供云与气溶胶剖面测量的重要能力。
在LITE以及SLA (美国1996年航天飞机搭载激光高度计)、MOLA (美国1996年发射火星探测器,搭载的激光高度计)的技术基础上,地球科学激光测高ICESat-1卫星实现多波长全固态星载激光雷达技术,获得全球海冰厚度、冰盖分布、海表高程,并辅助测量云层等大气数据。
NASA发射CALIPSO卫星目前仍然在轨运行,实现正交偏振、多通道探测星载激光雷达技术,突破长寿命星载全固态激光器技术,获得全球大气、海洋的激光雷达探测数据,CALIPSO使星载激光雷达设计八年寿命成为可能。
“风神Aeolus”卫星为全球首个风场多普勒探测激光雷达,研制历时20年,空间激光器防污染首次采用在轨“充氧”设计,卫星三年设计寿命,耗资5.5亿美元。2019年6月,在第29届ILRC (International Laser Radar Conference)会议上,ALADIN (The Atmospheric Laser Doppler Instrument)研制团队公开在轨355 nm激光器运行数据,激光器单脉冲能量以每周1 mJ的速度下降,于2019年初启动备份激光器,目前状态基本良好。ALADIN突破星载激光器高精度稳频、风场多普勒信号检测激光雷达技术;在轨期间激光器充氧气,突破355 nm紫外波段全固态激光器防污染技术。
ICESat-2卫星,为ICESat-1卫星的后续星,实现了空间激光器高重频、多波束、单光子回波探测激光雷达技术;获取极地海冰厚度、冰盖变化、海表高程、植被高度,提供全球城市、海洋、陆地测绘信息,对南北极海冰物质平衡和计算全球生物总量具有重大科学意义。
-
我国对地观测激光雷达经过多年发展,目前已发射了三颗卫星,分别为:2016年资源三号02星、2019年高分七号,以及2020年7月发射资源三号03星。这三颗卫星都搭载了对地观测激光测高载荷,用于承担星下高程控制点的测距任务,辅助光学立体测绘相机,实现提高光学卫星影像无控立体测绘精度。
其中,高分七号搭载的激光测高仪载荷,是我国首个对地观测的双波束激光测高仪。实现单频、高能量、高光束质量输出,设计寿命八年。标志着我国具备长寿命、大能量空间全固态激光器研制能力,对推动对地遥感载荷发展具有重要意义。
目前,我国在研的民用大气环境监测卫星,主载荷为大气探测激光雷达,在国际上首次采用三波长双体制激光雷达探测技术,利用532 nm波长进行云和气溶胶的偏振与高光谱探测,利用1 064 nm进行云和气溶胶后向散射,以及地面高程信息探测,利用1 572 nm (On及Off双波长)激光脉冲进行CO2柱浓度差分吸收探测。其中,532 nm接收通道探测器采用大动态范围、通道拼接技术,在轨期间可获得海洋次表层数据产品,未来大气环境监测卫星海洋环境探测值得期待。2019年3月,大气探测激光雷达完成机载校飞试验(见图5 )。大气环境监测卫星预计2021年发射。
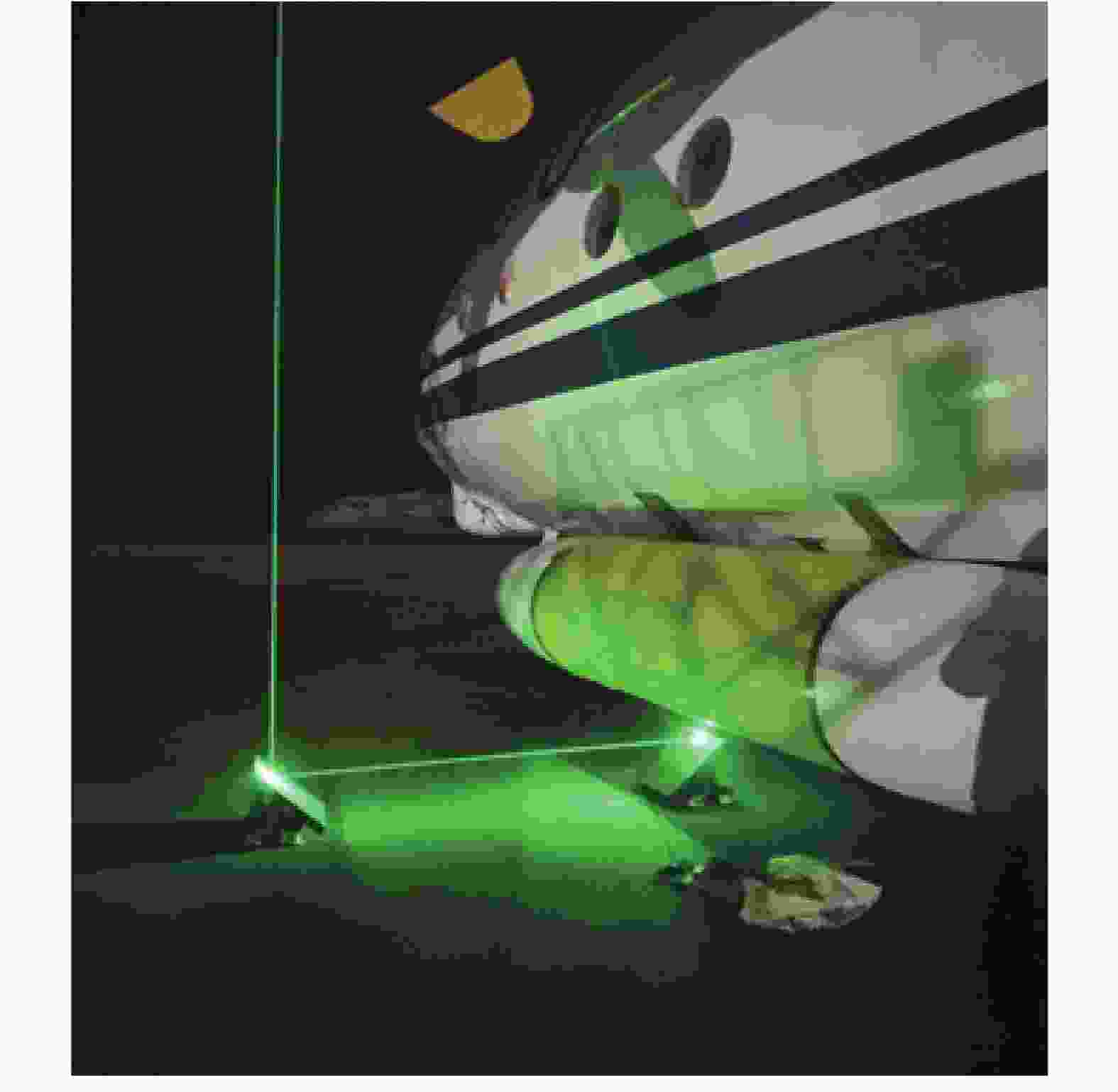
图 5 大气探测激光雷达校飞样机测试
Figure 5. Flight calibration prototype test of atmospheric lidar
-
目前,由于在轨没有星载海洋激光雷达,现有532 nm波长星载激光雷达都进行了海洋方面的探索。如CALIPOSO激光雷达卫星在海洋探测领域已经有一定的应用,主要包括海洋水色、POC (Paticulate Organic Carbon)等[8, 14]。近期Icesat-2卫星也公布了其在海洋次表层20 m左右获取的海洋数据信息[6]。
综上,对星载海洋激光雷达预期的数据产品进行梳理[4-8, 14-17],可技术应用的数据产品,如图6所示。

图 6 星载海洋激光雷达预期的数据产品
Figure 6. Expected data products of future spaceborne ocean lidar
-
海洋激光雷达可获得水下剖面散射层信息,这些散射层大部分是单一或多细胞的浮游植物,以及大量由直径超过1 mm的单个非球型藻类细胞构成,其中多细胞的非球形藻类细胞群落尺寸可能更大,结构也更复杂,入射的光子将在个体细胞内产生光学高阶散射。这些水下散射层信息都可利用海洋激光雷达进行探测。
在浮游植物与藻类细胞组成的散射层中,包含高浓度营养物质与浮游植物构成的稀薄层,这些层可能只有10 cm左右,但延伸数千米,并持续数天,常常与海洋密度跃层息息相关。这些集中层可以影响海洋上层的地球生物化学过程,包括海洋初级生产力和有害藻类的形成。所以,通过正交偏振激光雷达的回波退偏情况,可获取海水中粒子、POC、浮游植物(海藻细胞)、鱼群等分布信息[4-8, 14-16]。如图7所示,利用机载海洋激光雷达获取水下浮游生物散射层与鱼群分布信息。
高光谱激光雷达HSRL (high-spectral-resolution lidar)技术,源于区分在大气探测中气溶胶与分子散射信号的方法;同样的概念可以应用于海水,利用海洋激光雷达高光谱技术,可获得海水的衰减与后向散射系数,从而获得海水的固有光学参数剖面信息[8, 15] 。
-
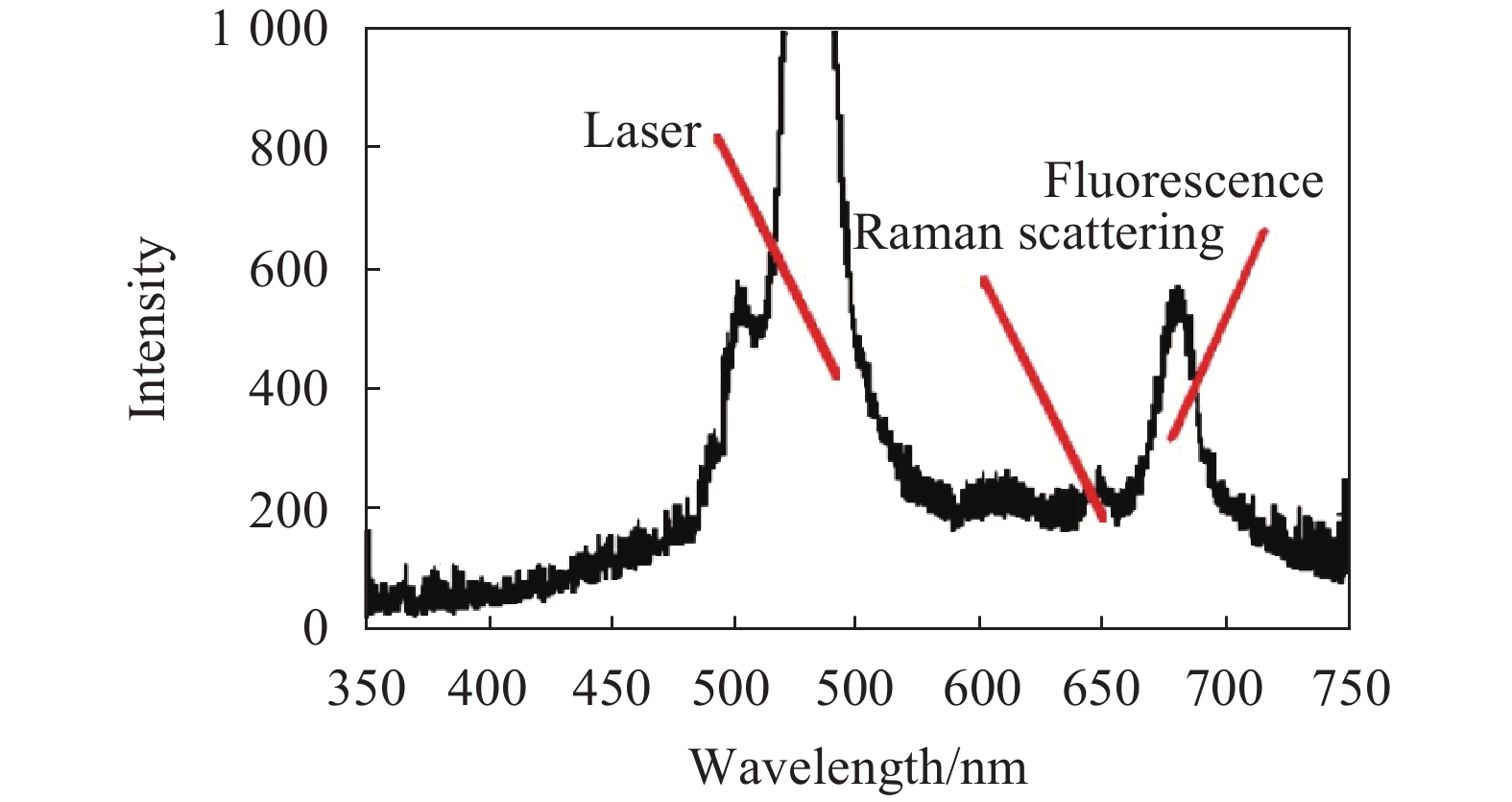
在海洋光学中,存在于每一个浮游植物细胞中的光合作用色素能够降低或将CO2固化为有机碳,将太阳能转化为化学能,并产生O2。这些色素包含无处不在的叶绿素a,辅助色素叶绿素b和叶绿素c,以及光合的类胡萝卜素。由于叶绿素a是所有浮游植物中唯一的光合色素,因此提供了一种用于测量浮游植物丰度和生物量的方法。
叶绿素a的发射光谱很重要的一个特性就是在683 nm左右出现荧光峰,在荧光峰处,浮游植物激发的辐射荧光能够被卫星监测。所以,利用蓝绿激光发射到海洋中,海水中叶绿素a受激发会出现683 nm左右波长的红色荧光,根据接收到的荧光强度能够反演出海水中叶绿素a的柱浓度,以及通过647 nm左右喇曼回波获取海面溢油情况,探测精度可达35%~40%[4-8, 22]。如图8所示,利用海洋激光雷达532nm激光,获得海洋叶绿素a荧光与喇曼散射光谱。
-
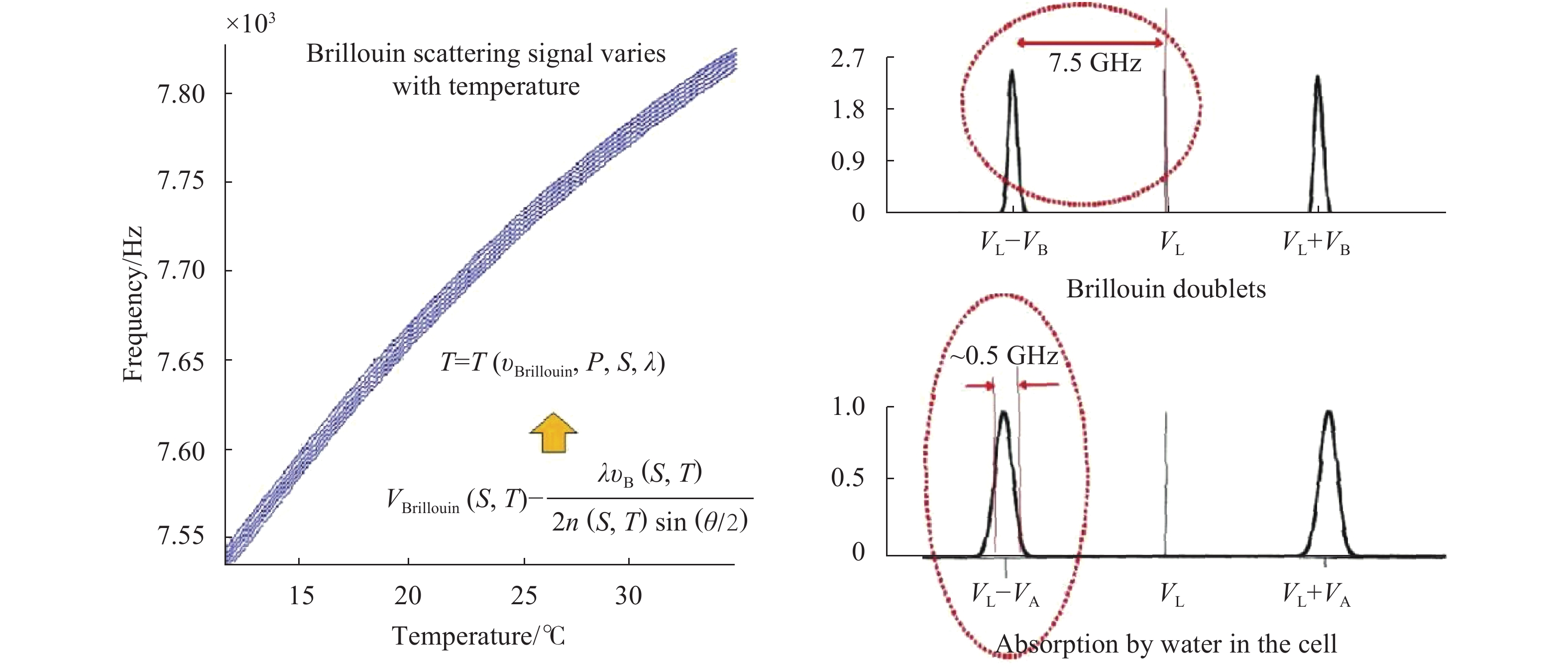
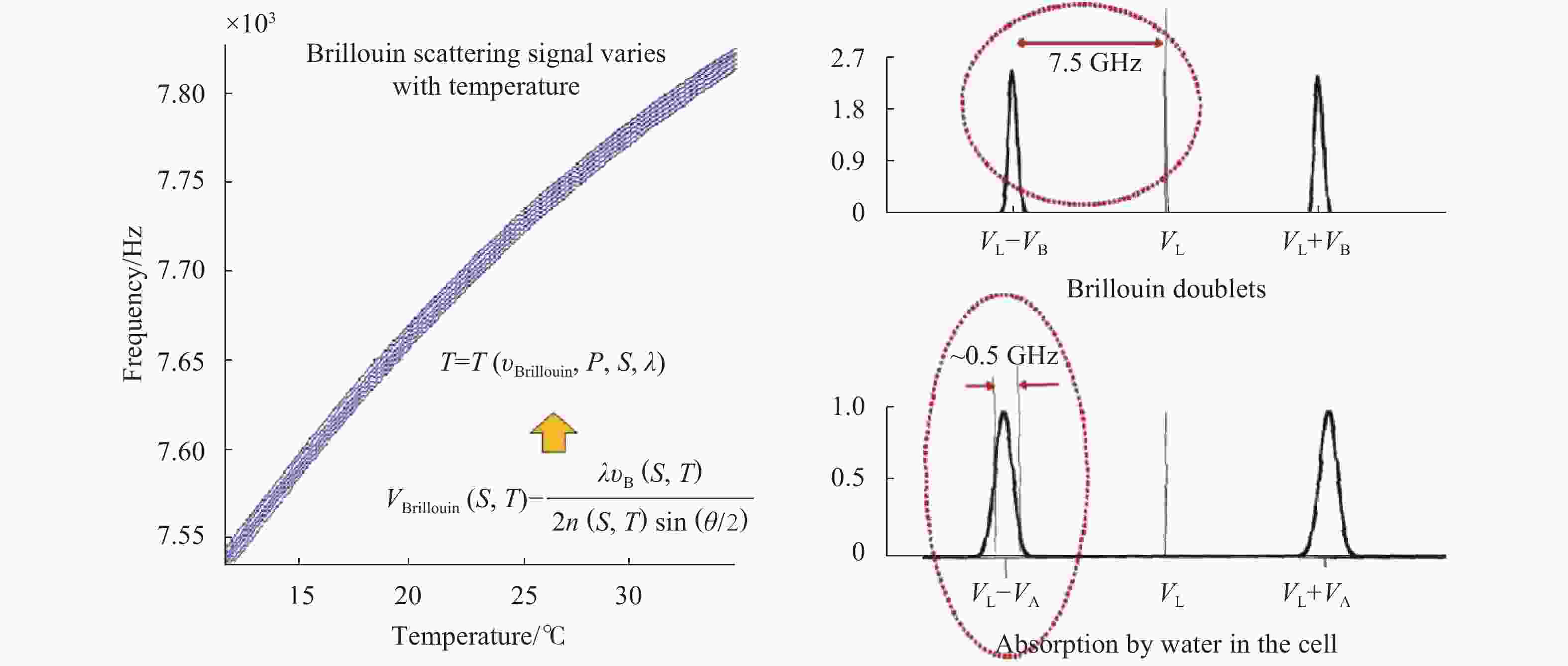
用海洋激光雷达探测水体非弹性(布里渊)散射信号,获得海洋剖面温度是项前沿技术。入射海洋中的激光束,水中声子与激光相互作用,产生布里渊频移;利用532 nm的绿色激光入射纯水,将产生窄带的7.5 GHz频移,通过激光雷达接收光路鉴频器,可精确获得水中声速,通过已知海水中盐度与压强,能够反演海水剖面温度信息[8, 17-22],水体剖面温度测量原理如图9所示。
-
与测高激光雷达原理基本一致,海洋激光雷达工作期间,同时获得陆地、海冰(海表)和海底的回波信号,测量原理如图10所示,采用脉冲整形和时间数字转换(TDC )技术测量激光脉冲到陆地、海冰(海表)回波信号的时间延迟,用于测量陆地和瞬时海冰(海表)的斜程。采用高速AD采样激光海冰(海表)反射、穿透海水的后向散射和海底回波信号的完整波形,通过算法将海表和海底的回波波形与水体散射波形进行分离,计算海冰(海表)和海底的回波时间延迟来获得海底的斜程。通过海洋激光雷达探测,能够获得海水深度、海冰高程、以及海表粗糙度等信息[11]。
-
通过海洋激光雷达的探测数据,采用浮游生物和藻类细胞的散射作为示踪物,可提供次表层海洋的动力信息,如混合层深度、内波和湍流等信息。其内波总能量密度可以通过激光雷达二次扫描内波传播速度被估算[4-8](见图2)。
-
目前,上海航天技术研究院正在积极论证高精度海洋激光探测卫星,对卫星的技术指标和关键技术进行了初步梳理。认为轨道采用低倾角的太阳同步轨道设计,有效载荷为海洋探测激光雷达,配备被动光学或微波载荷;星载激光雷达激光波长具备蓝绿双波长输出,单脉冲能量400 mJ以上;接收系统口径为2 m以上,采用偏振与光致荧光检测、双频高光谱激光雷达技术接收后向散射与海洋荧光信号[9, 11, 14]。
可获取全球海洋次表层的温度剖面、水体固有光学参数、叶绿素浓度,以及散射层、浮游生物、水中颗粒物、POC、海洋内波、湍流、海冰等信息[4-8, 22]。
-
(1)高效蓝绿波段大功率、高可靠空间激光器技术
激光器是激光雷达探测的核心部件,直接制约了载荷的性能以及寿命。目前,532 nm探测波段主要受到激光器成熟度的影响,并非海洋探测的最佳波段,亟需发展460~505 nm之间的新型高功率、长寿命空间激光器,进一步提升海洋穿透能力。星载高功率蓝绿双频激光器原理样机出光测试如图11所示。
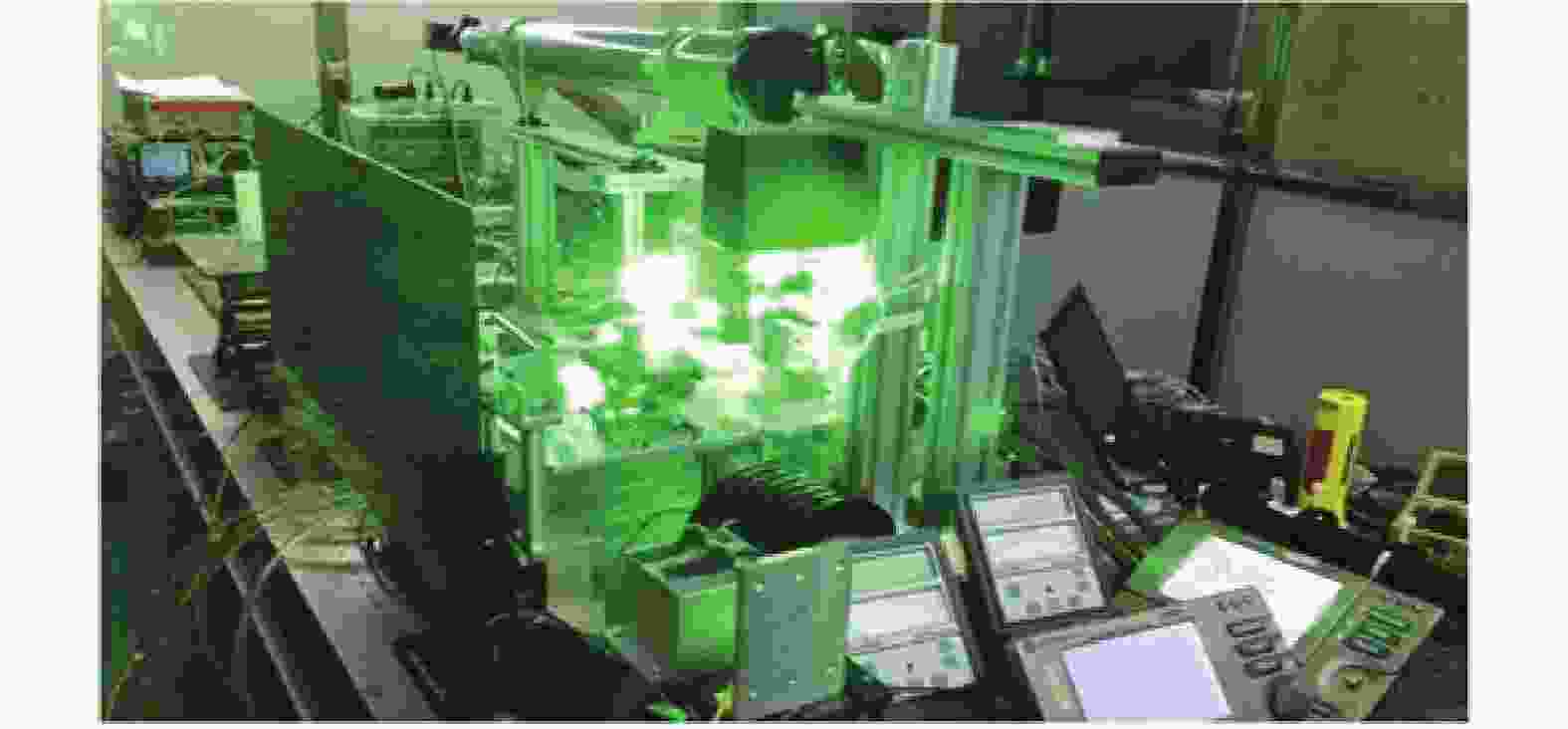
图 11 高功率蓝绿激光器原理样机
Figure 11. Prototype of high power blue-green laser
(2)低噪声、高宽带、高灵敏度和高量子效率探测技术
海洋激光探测尤其是利用布里渊散射进行海水温度剖面探测,对信噪比、灵敏度要求特别高,需要突破高效率的探测技术。
(3)大口径激光雷达载荷技术
经仿真分析,获取预期海洋探测数据产品,海洋激光雷达需要2 m以上口径接收装置。2018年ESA发射的星载测风激光雷达ALADIN的光机结构如图12所示,接收望远镜口径1.5 m,为目前在轨接收口径最大激光雷达。

图 12 ALADIN测风激光雷达光机结构
Figure 12. ALADIN wind lidar opto-mechanical structure
(4)高速、低噪声、大动态范围数据采集技术
海洋激光探测相对其他要素对动态范围要求更高,需要突破高速低噪声数据采集技术。通过模拟采集和单光子技术融合,实现大动态范围(100 dB)、高速(采样频率20 MHz)的激光雷达信号采集。如图13所示。
-
海洋次表层结构参数往往相互耦合,如布里渊温度测量受盐度的耦合影响。如何进行有效的参数分析提取,还有待应用的深入研究,以确保有合理可行的应用处理方法,以及合理可行的探测指标要求与应用产品。
(1)海洋激光探测高精度反演技术
针对海洋激光不同探测要素,需提前开展数据高精度反演技术研究,保证后续在轨应用效能[15-17, 23]。
(2)主被动结合高精度反演技术
针对海洋探测要素,综合利用主动激光和其它探测手段,进行多元数据融合反演研究[23]。
-
海洋激光雷达探测技术是实现海洋高精度次表层参数探测的可行、有效的手段,是海洋卫星遥感技术的方向,将在海洋探测领域发挥重要作用。
通过若干年的共同努力研究,在充分继承我国激光遥感卫星及雷达技术良好的技术基础上,可以在“十四五”期间完成海洋激光雷达探测卫星的研制和应用,填补我国及国际的海洋激光遥感空白,极大推进国家海洋强国战略的建设。
Research on the development of the detection satellite technology in oceanographic lidar
-
摘要: 从国家海洋战略需求出发,对我国发展海洋激光雷达必要性进行分析,对海洋激光雷达的特点,以及国内外发展情况进行梳理;分析了目前国内外激光雷达建设规划与已发射星载激光雷达的情况,提出未来星载海洋激光雷达的发展方向,以及在轨预期数据应用产品,讨论了星载海洋激光雷达关键技术,给出了“十四五”期间海洋激光雷达的发展前景。Abstract: Started with needs of the national marine strategy, the necessity of China’s oceanographic lidar developing was analyzed, the characteristics and domestic overseas’ development of the oceanographic lidar were summarized; the oceanographic lidar current construction and planning at home and abroad and the launched spaceborne lidar’s situation were analyzed, the future spaceborne ocean lidar’s development direction was put forward and on-orbit data application product was expected, the key technology of the spaceborne ocean lidar was discussed, the application prospect of developing the oceanographic lidar during the 14th five year plan oceanographic was given.
-
Key words:
- oceanographic lidar /
- ocean detection /
- spaceborne lidar /
- oceanremotesensing
-

Parameters Hawkeye Ⅲ(Leica) CZMIL (Optech) LADS HD (Fugro) Instrument image Measuring object Ocean & Land Ocean & Land Ocean Technique Multichannel simulation probe Multichannel simulation probe Simulation probe Wavelength 532 nm,1064 nm & 1550 nm 532 nm & 1064 nm 532 nm & 1064 nm Investigation depth 0.15-50 m 0.15-50 m 0.15-50 m Detecting precision 0.36 m (50 m) 0.36 m (50 m) 0.36 m (50 m) Detecting precision 10 kHz (Ocean) 500 kHz (Land) 10 kHz (Ocean) 70 kHz (Land) 3 kHz (Ocean) Aspect angle 40° 40° 30° Grid density 0.8 m×0.8 m (Ocean) 0.1 m×0.1 m (Land) 0.8 m×0.8 m (Ocean) 0.3 m×0.3 m (Land) 1.4 m×1.4 m (Ocean)  下载: 导出CSV
下载: 导出CSV
表 2 上海光学精密机械研究所研制三代机载激光雷达技术参数
Table 2. Parameters of the third airborne lidar system by Shanghai Institute of Optics and Fine Mechanics
Parameters LADM-Ⅰ LADM-Ⅱ Mapper-5000 Wavelength 1 064 nm & 532 nm 1 064 nm & 532 nm 1 550 nm,1 064 nm & 532 nm Repetition frequency 200 Hz 1 kHz 5 kHz Grid density 5 m×5 m 2.5 m×2.5 m 1 m×1 m (Ocean) 0.25 m×0.25 m (Land) Weight 300 kg 350 kg 98 kg
下载: 导出CSV
表 3 机载Mapper-5000 (第三代)双频激光雷达海陆技术指标
Table 3. Parameters of the airborne Mapper-5000 (the third) double frequency lidar
Parameters Ocean Land Wavelength 1 064 nm & 532 nm 1 550 nm Repetition frequency 5 kHz 100-400 kHz Grid density 1 m×1 m 0.25 m×0.25 m Scanned area ±15° ±30° Flight altitude 100-1 500 m Vertical accuracy 0.12 m Investigation depth 0.25-51 m Detecting precision 0.23 m Position accuracy 0.26 m Power dissipation 1.2 kW
下载: 导出CSV
表 4 星载海洋探测激光雷达特点
Table 4. Features of spaceborne ocean lidar
Target of detection Theory Repeated frequency Single pulse energy SNR Frequency stability Forest Height measurement High Lesser Esser General Mapping Height measurement Highest Lesser Esser General Aerosol Back scattering General Biggish Biggish General Atmospheric composition Differential absorption General Biggish Biggish Biggish Wind field Doppler General Biggish Biggish Maximum Ocean Back scattering General Maximum Maximum Maximum
下载: 导出CSV
-
[1] 蒋兴伟, 林明森, 张有广. 中国海洋卫星及应用进展[J]. 遥感学报, 2016, 20(5): 1185-1198. Jiang Xingwei, Lin Mingsen, Zhang Youguang. Progress and prospect of Chinese ocean satellites [J]. Journal of Remote Sensing, 2016, 20(5): 1185-1198. (in Chinese [2] 林明森, 何贤强, 贾永君, 等. 中国海洋卫星遥感技术进展[J]. 海洋学报, 2019, 41(10): 99-112. Lin Mingsen, He Xianqiang, Jia Yongjun, et al. Advances in marine satellite remote sensing technology in China [J]. Acta Oceanologica Sinica, 2019, 41(10): 99-112. (in Chinese [3] 蒋兴伟, 何贤强, 林明森, 等. 中国海洋卫星遥感应用进展[J]. 海洋学报, 2019, 41(10): 113-124. Jiang Xingwei, He Xianqiang, Lin Mingsen, et al. Progresses on ocean satellite remote sensing application in China [J]. Acta Oceanologica Sinica, 2019, 41(10): 113-124. (in Chinese [4] Jamet Cedric, Ibrahim Amir, Ahmad Ziauddin, et al. Going beyond standard ocean color observations: Lidar and polarimetry [J]. Frontiers in Marine Science, 2019, 6: 1-24. doi: 10.3389/fmars.2019.00001 [5] Michael R Roddewig, James H Churnside, Joseph A Shaw. Lidar measurements of the diffuse attenuation coefficient in Yellowstone Lake [J]. Applied Optics, 2020, 59(10): 3097-3101. doi: 10.1364/AO.389169 [6] James H Churnside1, Joseph A Shaw. Lidar remote sensing of the aquatic environment: invited [J]. Applied Optics, 2020, 59(10): C92-C99. doi: 10.1364/AO.59.000C92 [7] Timothy S Moore, James H Churnside, James M Sullivan, et al. Vertical distributions of blooming cyanobacteria populations in a freshwater lake from LIDAR observations [J]. Remote Sensing of Environment, 2019, 225: 347-367. doi: 10.1016/j.rse.2019.02.025 [8] James H Churnside. Review of profiling oceanographic lidar [J]. Optical Engineering, 2014, 53(5): 051405. [9] 贺岩, 胡善江, 陈卫标, 等. 国产机载双频激光雷达探测技术研究进展[J]. 激光与光电子学进展, 2018, 55(8): 082801. He Yan, Hu Shanjiang, Chen Weibiao, et al. Research progress of domestic airborne dual-frequency LiDAR detection technology [J]. Laser & Optoelectronics Progress, 2018, 55(8): 082801. (in Chinese [10] Tuell G, Barbor K, Wozencraft J. Overview of the coastal zone mapping andimaging lidar (CZMIL): a new multisensor airborne mapping system for the US Army Corps of Engineers[C]// Proceedings of SPIE, 2010, 7695: 7695R. [11] 胡善江, 贺岩, 陈卫标, 等. 机载双频激光雷达系统设计和研制[J]. 红外与激光工程, 2018, 47(9): 0930001. doi: 10.3788/IRLA201847.0930001 Hu Shanjiang, He Yan, Chen Weibiao, et al. Design of airborne dual-frequency laser radar systemy [J]. Infrared and Laser Engineering, 2018, 47(9): 0930001. (in Chinese doi: 10.3788/IRLA201847.0930001 [12] 栾晓宁, 李菁文, 郭金家, 等. 海洋激光雷达在渔业资源调查和生态环境监测中的应用[J]. 激光生物学报, 2014, 23(6): 534-541. doi: 10.3969/j.issn.1007-7146.2014.06.005 Luan Xiaoning, Li Jingwen, Guo Jinjia, et al. Ocean lidar for fishery resources survey and ecological environment monitoring [J]. Acta Laser Biology Sinica, 2014, 23(6): 534-541. (in Chinese doi: 10.3969/j.issn.1007-7146.2014.06.005 [13] Michael G Solonenko, Curtis D Mobley. Inherent optical properties of Jerlov water types [J]. Applied Optics, 2015, 54(17): 5392-5401. doi: 10.1364/AO.54.005392 [14] 徐沛拓, 陶雨婷, 刘志鹏, 等. 海洋激光雷达实验与仿真结果的对比[J]. 红外与激光工程, 2020, 49(2): 0203007. doi: 10.3788/IRLA202049.0203007 Xu Peituo, Tao Yuting, Liu Zhipeng, et al. Comparison of oceanic lidar experiments and simulation results [J]. Infrared and Laser Engineering, 2020, 49(2): 0203007. (in Chinese doi: 10.3788/IRLA202049.0203007 [15] 刘东, 周雨迪, 朱小磊, 等. 大气海洋髙光谱分辨率激光雷达鉴频特性研究[J]. 大气与环境光学学报, 2020, 15(1): 48-54. Liu Dong, Zhou Yudi, Zhu Xiaolei, et al. Investigation on discrimination characteristcs of atmospheric and oceanic high spectral resolution lidar [J]. Journal of Atmospheric and Environmental Optics, 2020, 15(1): 48-54. (in Chinese [16] 徐沛拓, 刘东, 周雨迪, 等. 海洋激光雷达多次散射回波信号建模与分析[J]. 遥感学报, 2020, 49(2): 0203007. Xu Peituo, Liu Dong, Zhou Yudi, et al. Modeling and analysis of oceanic lidar returns with multiple scattering [J]. Journal of Remote Sensing, 2020, 49(2): 0203007. (in Chinese [17] Edward S. Fry, Yves Emery, Quan Xiaohong, et al. Accuracy limitations on Brillouin lidar measurements of temperature and sound speed in the ocean [J]. Applied Optics, 1997, 36(27): 6887-6894. doi: 10.1364/AO.36.006887 [18] Zhou Bo, Fan Qiming, Ma Yong, et al. Experimental analysis on the rapid measurement of a high precision Brillouin scattering spectrum in water using a Fabry-Perot etalon [J]. Laser Physics Letters, 2016, 13(5): 1-9. [19] Chengyong Feng, Xiaozhen Xu, Jean-Claude Diels. Generation of 300 ps laser pulse with 1.2 J energy by stimulated Brillouin scattering in water at 532 nm [J]. Optics Letters, 2014, 39(12): 3367-3370. doi: 10.1364/OL.39.003367 [20] 刘金涛, 陈卫标, 宋小全, 等. 外差激光雷达测量水体布里渊散射可行性研究[J]. 青岛海洋大学学报, 2002, 32(1): 139-144. Liu Jintao, Chen Weibiao, Song Xiaoquan, et al. Potential for measurement of water Brllouin scattering with heterodyne lidar [J]. Journal of Ocean University of Qingdao, 2002, 32(1): 139-144. (in Chinese [21] 高玮, 吕志伟, 何伟明, 等. 盐度和压强对布里渊雷达遥测海洋温度的影响[J]. 哈尔滨工业大学学报, 2008, 40(3): 354-357. doi: 10.3321/j.issn:0367-6234.2008.03.005 Gao Wei, Lv Zhiwei, He Weiming, et al. Efects of salinity and pressureon the ocean temperature measurement by Brillouin lidarr [J]. Journal of Harbin Institute of Technology, 2008, 40(3): 354-357. (in Chinese doi: 10.3321/j.issn:0367-6234.2008.03.005 [22] Joyanto Mukerjee. Remote Sensing of Ocean Waters with Raman and Brillouin Scattering[M]. Australia: DSTO Aeronautical and Maritime Research Laboratory, 2001: 2-22. [23] James H Churnsidei, Richard D Marchbanks. Calibration of an airborne oceanographic lidar using ocean back scattering measurements from space [J]. Optics Express, 2019, 27(8): A536-A542. doi: 10.1364/OE.27.00A536 -

 点击查看大图
点击查看大图

图(13) / 表(4)
计量
- 文章访问数: 1296
- HTML全文浏览量: 539
- PDF下载量: 253
- 被引次数: 0

