







-
光强探测器在惯性约束聚变(ICF)装置激光参数测量模块中大量应用,其主要功能是借助取样光路来测量主光路高能激光的近场分布,衡量主光路的激光光束质量,进而为惯性约束聚变装置性能评估提供反馈[1-5]。惯性约束聚变装置激光近场分布测量精度要求较高,扣除取样光路光学系统引入的误差外,光强探测器要真实反映近场分布,对应面响应非均匀性要求较高,由于光强探测器的面响应非均匀性是一种固定图形噪声(由探测器的加工工艺、材料、温度、和偏置情况等多种因素造成)[6-7],严重影响激光近场参数测量精度。为了扣除光强探测器在高能激光近场参数测量时引入的本底误差,提高高能激光近场参数测量结果的置信度,对光强探测器面响应非均匀性校正十分必要。目前光强探测器面响应非均匀性校正的实用方法有两点定标法、多点定标分段校正法及自适应背景校正法等[8-14]。两点定标校正法对暗电平与增益均作了校正,但对定标点光强的依赖性较大,尤其在光强探测器响应的低灰度段参与运算时,校正效果较差。多点定标分段校正法精度虽高,标定时需在光强探测器标定量程范围内密集采集多个样本,并在每个定标点计算一个修正矩阵,当图像灰度落在该定标点或附近时,采用查表对图像灰度响应值进行修正,此方法标定较为耗时,且运算量大,适合对单机或小批量探测器校正。自适应背景校正法一般处理背景环境较为复杂的图像,由于惯性约束聚变装置激光参数测量模块采集的近场图像信息主要为被测高能激光传输过程中近场强度分布及附加在近场上的调制信息,目标图像为一个亮斑,背景为灰度较为一致的暗场图像,因此,此方法也不适用。为了实现高能激光参数测量中的光强探测器面响应非均匀性校正,文中提出一种基于多点定标的线性校正方法,通过均匀面光源辐照探测器,在探测器线性响应段内采集不同组灰度图像,各响应段的灰度图像均值作为非均匀校正的期望值,采用最小二乘法拟合出两个修正矩阵因子,从而实现对光强探测器的面响应非均匀性进行校正。所提方法校正实时性好,校正后光强探测器的面响应均匀性也大幅提高。
-
由于高能激光惯性约束聚变系统中光强探测器使用的特殊条件,在激光近场参数测量时只关心在光强探测器光学动态范围内的近场均匀性指标。衡量高能激光近场均匀性的两个指标为调制度
$M$ 和对比度$C$ ,定义如下:$$M = \frac{{\max \left\{ {I\left( {i,j} \right)} \right\}}}{{\bar I}}$$ (1) $$C = \frac{{\sqrt {\dfrac{1}{{p \times q}}\displaystyle\sum\limits_{i = 1}^p {{{\displaystyle\sum\limits_{j = 1}^q {\left[ {I\left( {i,j} \right) - \bar I} \right]} }^2}} } }}{{\bar I}}$$ (2) $$\bar I = \frac{{\displaystyle\sum\limits_{i = 1}^p {\displaystyle\sum\limits_{j = 1}^q {I\left( {i,j} \right)} } }}{{p \times q}}$$ (3) 式中:
$i$ 为光强探测器行坐标;$j$ 为光强探测器列坐标;$I\left( {i,j} \right)$ 为在$\left( {i,j} \right)$ 坐标处光强探测器图像灰度分布;$p$ 为光强探测器像元总行数;$q$ 为光强探测器像元总列数;$\bar I$ 为全靶面光强探测器灰度平均值。为了减小校正时对定标点光强的依赖性,采用光强探测器动态范围内多点定标法。由于光强探测器的光电转换具有线性特性[15],因此,面响应非均匀性校正模型采用线性校正模型,即:
$$I'\left( {i,j} \right) = k\left( {i,j} \right) \times I\left( {i,j} \right) + b\left( {i,j} \right)$$ (4) 式中:
$ I{\rm{'}}\left(i,j\right)$ 为校正后的图像灰度分布;$k\left( {i,j} \right)$ 、$b\left( {i,j} \right)$ 为非均匀性校正因子。为了减少随机噪声的影响,在激光
$\phi \left( \zeta \right)$ 强度下,光强探测器采集$m$ 幅图像,求$m$ 幅图像的平均灰度分布,则:$${\bar I_{\phi \left( \zeta \right)}}\left( {i,j} \right) = \frac{{\displaystyle\sum\limits_{k = 1}^m {{I_{\phi \left( {\zeta ,k} \right)}}\left( {i,j} \right)} }}{m}$$ (5) 式中:
${I_{\phi \left( {\zeta ,k} \right)}}\left( {i,j} \right)$ 表示在$\phi \left( \zeta \right)$ 强度下采集的第$k$ 帧CCD灰度分布;${\bar I_{\phi \left( \zeta \right)}}\left( {i,j} \right)$ 表示在$\phi \left( \zeta \right)$ 强度下$m$ 幅图像的平均灰度分布。在平均灰度分布为${\bar I_{\phi \left( \zeta \right)}}\left( {i,j} \right)$ 时的平均灰度值为:$${\bar I_{\phi \left( \zeta \right)}} = \frac{{\displaystyle\sum\limits_{i = 1}^p {\displaystyle\sum\limits_{j = 1}^q {{{\bar I}_{\phi \left( \zeta \right)}}\left( {i,j} \right)} } }}{{p \times q}}$$ (6) 以
${\bar I_{\phi \left( \zeta \right)}}\left( {i,j} \right)$ 值作为在$\phi \left( \zeta \right)$ 强度下的校正期望值。在$N$ 档光强度下,每档采集$m$ 幅图像,根据最小二乘法得到非均匀性校正因子为:$$b\left( {i,j} \right) = \frac{{N \times \left\{ {\displaystyle\sum\limits_{\zeta = 1}^N {\left[ {{{\bar I}_{\phi \left( \zeta \right)}}\left( {i,j} \right) \times {{\bar I}_{\phi \left( \zeta \right)}}} \right]} } \right\} - \displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}\left( {i,j} \right) \times \displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}} } }}{{N \times \displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}{{\left( {i,j} \right)}^2} - {{\left[ {\displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}\left( {i,j} \right)} } \right]}^2}} }}$$ (7) $$k\left( {i,j} \right) = \frac{{\displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}} }}{N} - \frac{{b\left( {i,j} \right)}}{N}\displaystyle\sum\limits_{\zeta = 1}^N {{{\bar I}_{\phi \left( \zeta \right)}}\left( {i,j} \right)} $$ (8) 式中:
$N$ 表示不同激光光强档位。 -
光强探测器面响应非均匀性校正对校正装置的技术要求为:(1)能够线性调整校正光源输出功率;(2)校正光源强度分布均匀。
线性改变脉冲激光光源功率的方式有两种:一种是通过改变脉冲激光器的脉冲激励电流幅值实现激光功率线性输出,这种方法需要对电流幅值进行采样并A/D转换,经过算法处理后用D/A的方式再去控制脉冲激励电流的幅值,由于A/D和D/A的过程均存在延时,通常都在μs级别,而激光器脉冲宽度小于1 μs,因此这种方式在控制的过程中会存在不确定个数的激光脉冲参与输出,稳定性差,而且这种方法无法实现与激光输出功率改变的同时去同步光强探测器,无法满足对光强探测器面响应自动化校正的要求。另一种是通过外置的不同倍率衰减片实现对激光器功率的线性调节。这种方法对激光器能量线性调节的能力有限,而且还需要功率计实时测量衰减后的输出功率,由于很难将光强探测器的响应灰度与校正光源输出功率实时结合起来,故对校正光源输出功率的稳定性要求很高。
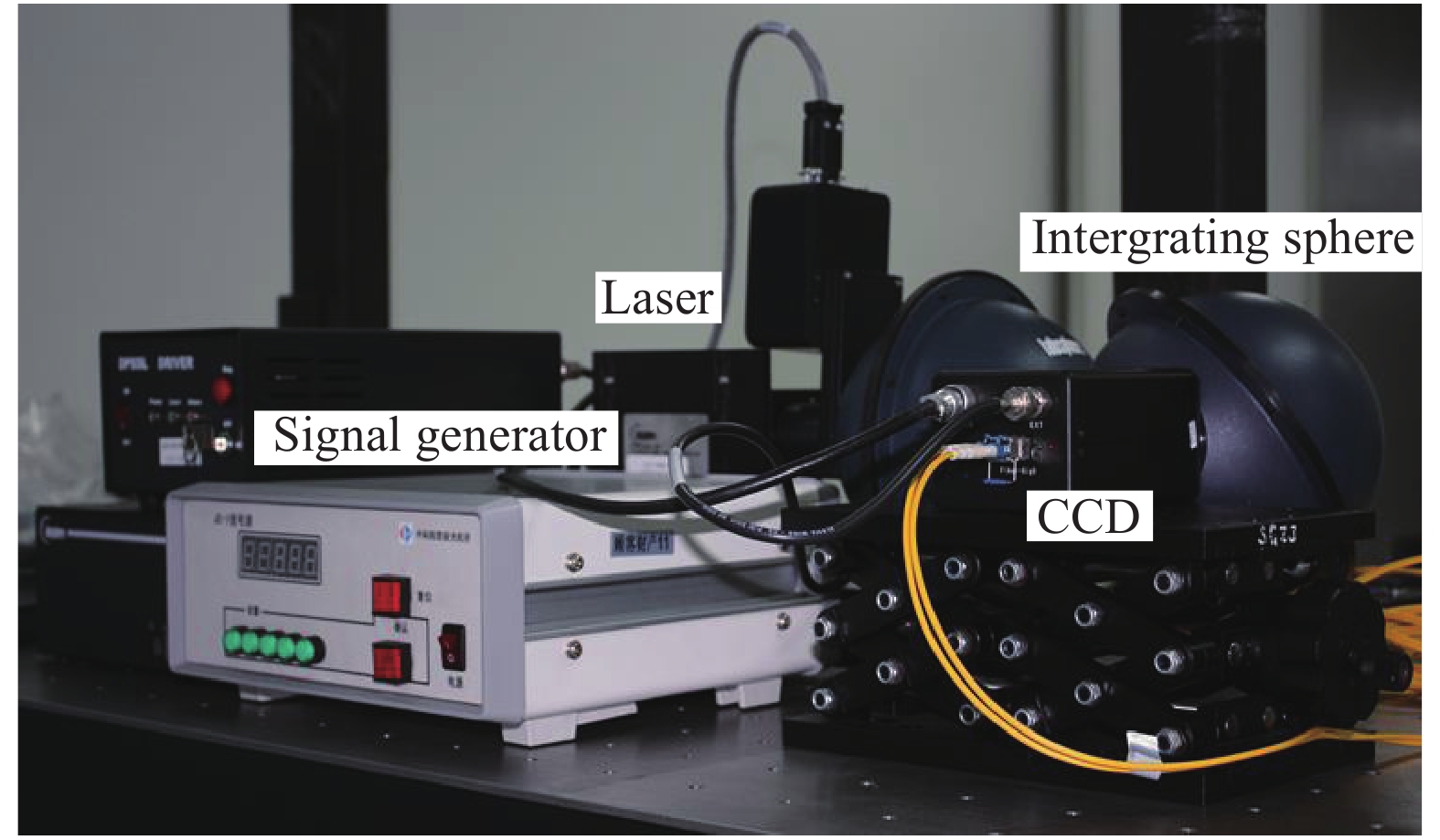
为了解决目前技术中存在的问题,实现对光强探测器面响应非均匀性的自动校正,并提高校正精度,文中采用改变校正激光器激励电源外部触发信号脉宽来精确控制脉冲激光器输出脉冲个数的方法来实现激光器输出功率的线性输出,并使标定装置各模块之间遵循严格的时序关系,从而实现对光强探测器面响应的非均匀性自动化校正。光强探测器面响应非均匀性校正装置如图1所示,由1 053 nm脉冲激光器、激光功率计、信号发生器、积分球及计算机组成。

图 1 光强探测器面响应非均性校正装置图
Figure 1. The diagram of the correction device for the surface response non-uniformity of the light intensity detector
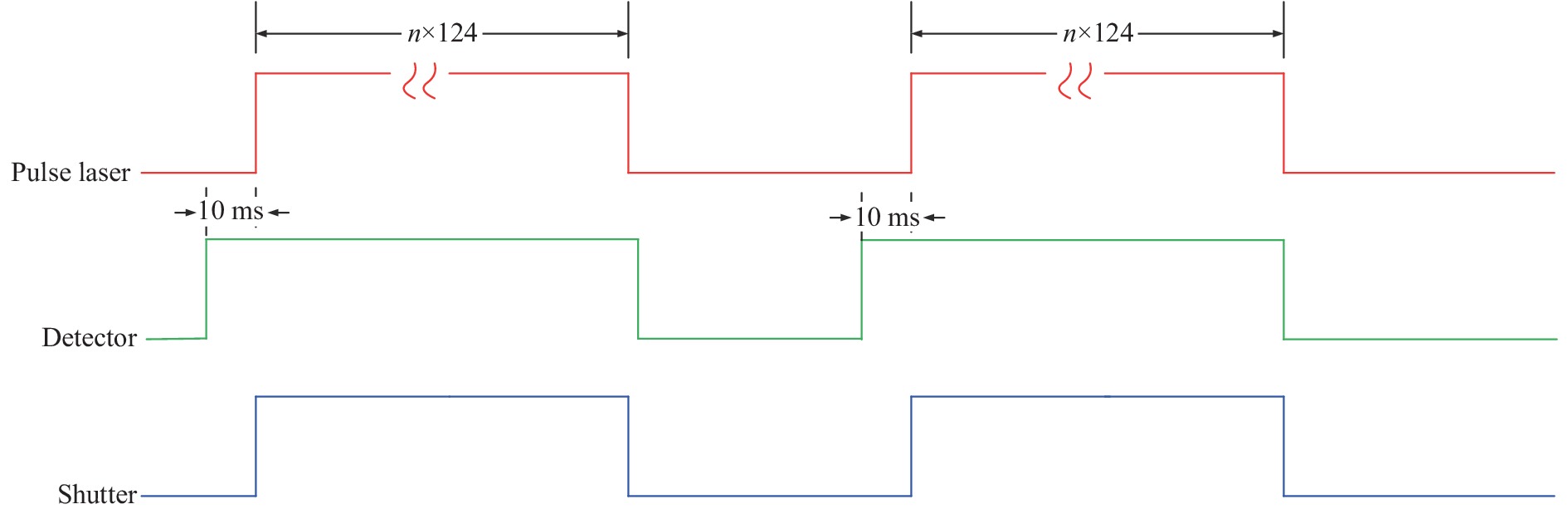
信号发生器输出两路触发信号,一路通过调节触发信号高电平脉宽长度控制激光器的单次输出脉冲个数,一路通过上升沿触发控制被测光强探测器采集,设备所用激光器的光脉冲周期为124 μs,脉宽为8 ns,当激光器触发信号高电平为124 μs的n倍时,激光器输出能量即为单脉冲的n倍。具体工作时序如图2所示。

图 2 信号发生器工作时序示意图
Figure 2. Schematic diagram of signal generator working sequence
积分球结构如图3所示,脉冲激光进入积分球后,整个球体表面的通量[16]为:
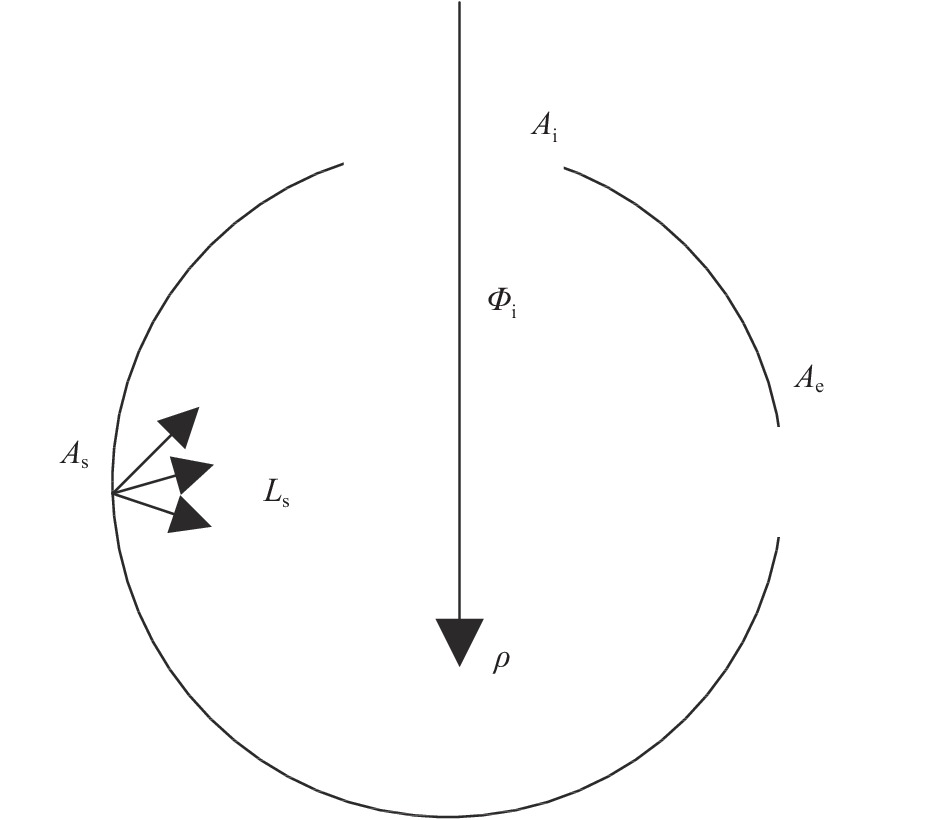
图 3 积分球结构
Figure 3. Structure of integrating sphere
$$ \begin{split} \varPhi =& {\varPhi _{\rm i}}\rho \left( {\frac{{{A_{\rm s}} - {A_{\rm i}} - {A_{\rm e}}}}{{{A_{\rm s}}}}} \right) =\\ & \mathop {}\limits_{}^{} {\varPhi _{\rm i}}\rho \left( {1 - f} \right) \end{split} $$ (9) 式中:
${\varPhi _{\rm i}}$ 为输入激光的光通量;ρ为积分球内胆反射系数;As为积分球的照明区域;Ai为输入端区域面积;Ae为输出端区域面积;f为积分球开孔比,且满足$f = \dfrac{{{A_{\rm i}} + {A_{\rm e}}}}{{4\pi {R^2}}}$ 。当存在两个以上的开口时,根据所有开口区域面积总和计算f。n次反射后,整个积分球表面的总通量为:
$$\varPhi = {\varPhi _{\rm i}}\rho \left( {1 - f} \right)\left\{ {1 + \rho \left( {1 - f} \right) + \cdots + {\rho ^{n - 1}}{{\left( {1 - f} \right)}^{n - 1}}} \right\}$$ (10) 给定r(1−f)<1,上式可化简为如下形式:
$$\varPhi = \frac{{{\varPhi _{\rm i}}\rho \left( {1 - f} \right)}}{{1 - \rho \left( {1 - f} \right)}}$$ (11) 根据公式(11),积分球输出口的亮度为:
$${L_{\rm s}} = \frac{{{\varPhi _{\rm i}}}}{{\pi {A_{\rm s}}}} · \frac{\rho }{{1 - \rho \left( {1 - f} \right)}}$$ (12) 根据公式(12)可知,积分球的匀化效果直接与积分球的开孔比有关,工程上通常选取积分球的开孔比<5%,通过合适的排布可保证积分球出光口的均匀性。为了提高脉冲激光光源的均匀性,通过两级积分球对脉冲激光光源进行匀化,第一积分球采用入光口、一次挡板和出光口一字排布形式,第二积分球采用入光口与出光口90°排布形式,第一积分球的出光口和第二积分球的入光口密封对接,两个积分球的内胆涂层均选用高反F4新型材料,设计参数如表1所示。
表 1 积分球设计参数
Table 1. Parameters of integral ball
Parameter of first integrating sphere Inner diameter of integrating sphere/mm Size of light entrance/mm Diameter of one-time baffle/mm Size of light exit/mm Φ150 Φ12 Φ15 Φ30 Parameter of second integrating sphere Inner diameter of integrating sphere/mm Size of light entrance/mm Size of light exit/mm Φ150 Φ30 Φ40 根据上述积分球初始结构参数,可获取两个积分球的开孔比和激光通过两个积分球因子M:
$$M = \frac{\rho }{{1 - \rho \left( {1 - f} \right)}}$$ (13) 两个积分球的开孔比分别为1.16%、2.78%;积分球内胆材料涂层在1 050 nm反射率ρ为0.985,因此,两个积分球的积分球因子分别为37.3和23.2,因此光源经过两个积分球后的光亮度为:
$${L_{\rm s}} \propto \frac{{{M_1}}}{{R_{\rm s1}^2}} \times \frac{{{M_2}}}{{R_{\rm s2}^2}}$$ (14) 标定位置处的照度均匀性是与积分球出口大小D和探测器靶面大小d、探测器位置与积分球出口的距离x有关,如图4所示。待标探测器靶面中心与积分球出口中心共轴,探测靶面中心照度E0可表示为:

图 4 探测器标定位置处照度均匀性原理图
Figure 4. Schematic diagram of illumination uniformity at the calibration position of the detector
$${E_0} = \pi {L_{\rm s}}{\sin ^2}\theta $$ (15) 式中:Ls为光亮度。对探测器靶面中心位置外的照度Ee可近似表示为:
$${E_{\rm e}} = {E_0}{\cos ^4}\phi $$ (16) 当探测器靶面紧贴积分球出口时,积分球出口处理论均匀性为100%。通过Tracepro仿真软件按积分球结构参数进行光线追迹,接收探测器靶面大小为10 mm×10 mm,仿真结果如图5所示,积分球输出口的强度面均匀性(调制度)可达到1.01,因此,光强探测器面响应非均匀性校正时校正光源引入的非均匀性可以忽略。
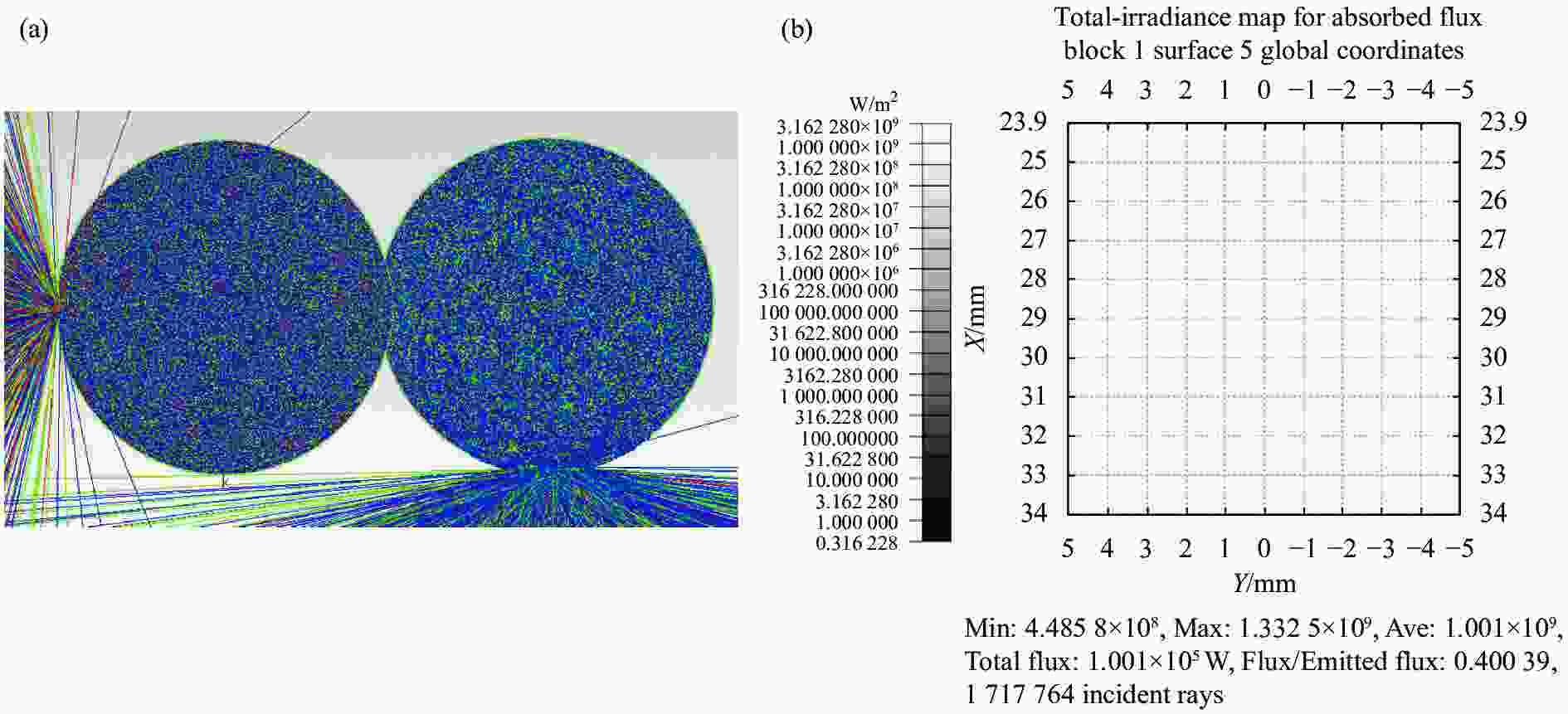
图 5 校正光源均匀性仿真结果
Figure 5. Simulation results of the uniformity of the corrected light source
-
为了验证所提方法的有效性,对某型号科学级CCD(量化位数12 bit,分辨率1024×1024)的面响应非均匀性进行了校正。
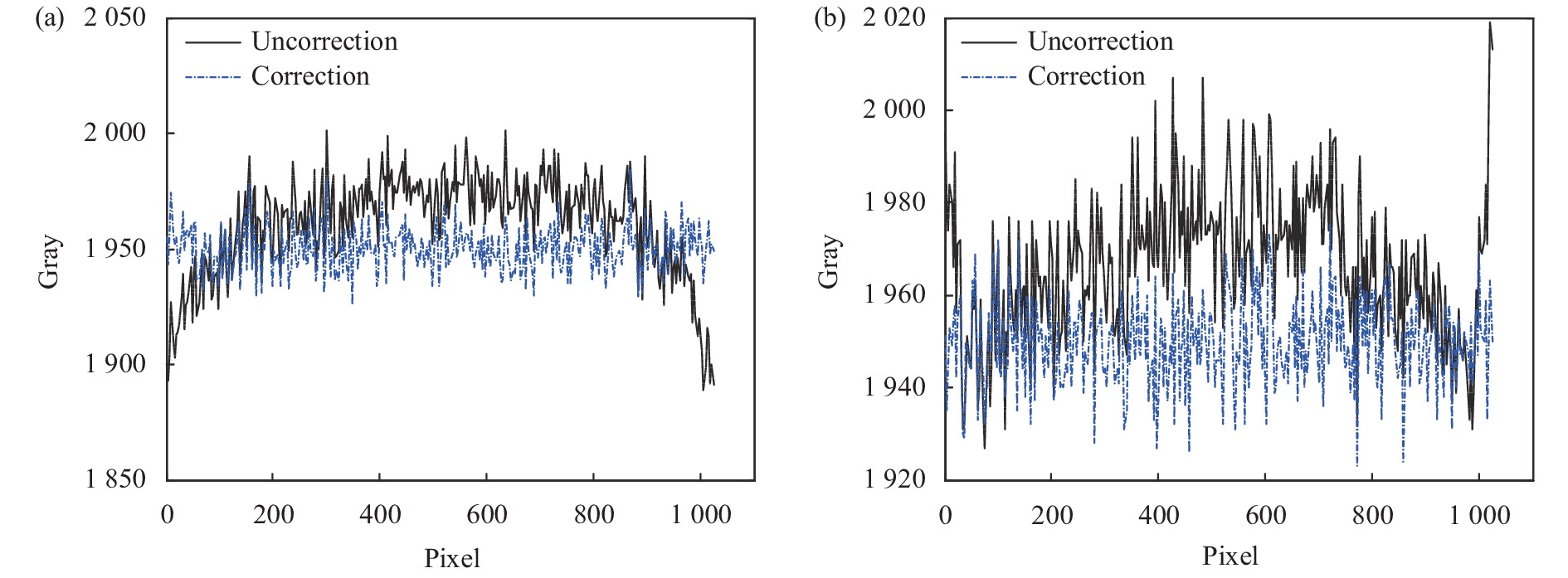
在科学CCD线性响应区内,光强档位选择10档,每档采集10幅图像,通过采集到的100幅图像计算CCD面响应非均匀性校正矩阵因子。为验证校正效果,调节激光光源强度,使科学CCD在不同灰度下工作,采集36档图像进行校正,校正前后的调制度、对比度如表2所示。CCD标定装置中激光光源工作在1档、18档及36档位下,CCD采集约饱和灰度10%、50%、90%三个灰度等级的图像,对图像校正前后行与列灰度分布曲线进行了对比,如图6、图7与图8所示。
表 2 调制度与对比度校正前后比较
Table 2. Comparison of modulation degree and contrast before and after correction
Source intensity CCD
average valueUncorrection Correction Modulation degree Contrast Modulation degree Contrast 1 429 1.08 0.017 1.05 0.011 2 510 1.07 0.016 1.05 0.009 3 584 1.07 0.015 1.05 0.009 4 667 1.07 0.015 1.04 0.008 5 746 1.11 0.015 1.04 0.008 6 830 1.17 0.015 1.04 0.007 7 911 1.21 0.015 1.03 0.007 8 995 1.24 0.014 1.03 0.007 9 1082 1.27 0.015 1.03 0.007 10 1165 1.29 0.014 1.03 0.006 11 1258 1.28 0.015 1.03 0.006 12 1344 1.32 0.015 1.04 0.006 13 1428 1.34 0.014 1.05 0.006 14 1518 1.34 0.015 1.05 0.006 15 1607 1.36 0.014 1.06 0.005 16 1695 1.37 0.014 1.06 0.005 17 1870 1.39 0.014 1.07 0.005 18 1960 1.39 0.014 1.07 0.005 19 2052 1.41 0.014 1.08 0.005 20 2145 1.41 0.014 1.08 0.005 21 2232 1.40 0.0143 1.07 0.005 22 2322 1.41 0.014 1.08 0.005 23 2415 1.40 0.014 1.07 0.005 24 2511 1.42 0.014 1.08 0.004 25 2602 1.42 0.014 1.08 0.004 26 2696 1.42 0.014 1.08 0.004 27 2785 1.42 0.014 1.08 0.004 28 2880 1.42 0.014 1.08 0.004 29 2977 1.38 0.015 1.05 0.004 30 3062 1.34 0.014 1.02 0.004 31 3160 1.30 0.014 1.02 0.004 32 3254 1.26 0.014 1.02 0.004 33 3351 1.22 0.015 1.02 0.004 34 3447 1.19 0.015 1.02 0.004 35 3534 1.11 0.014 1.02 0.004 36 3635 1.11 0.014 1.02 0.004 
图 6 约CCD饱和灰度10%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 6. Distribution before and after correction of ten percent of approximate CCD full gray: (a) Row direction; (b) Column direction

图 7 约CCD饱和灰度50%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 7. Distribution before and after correction of fifty percent approximate of CCD full gray: (a) Row direction; (b) Column direction

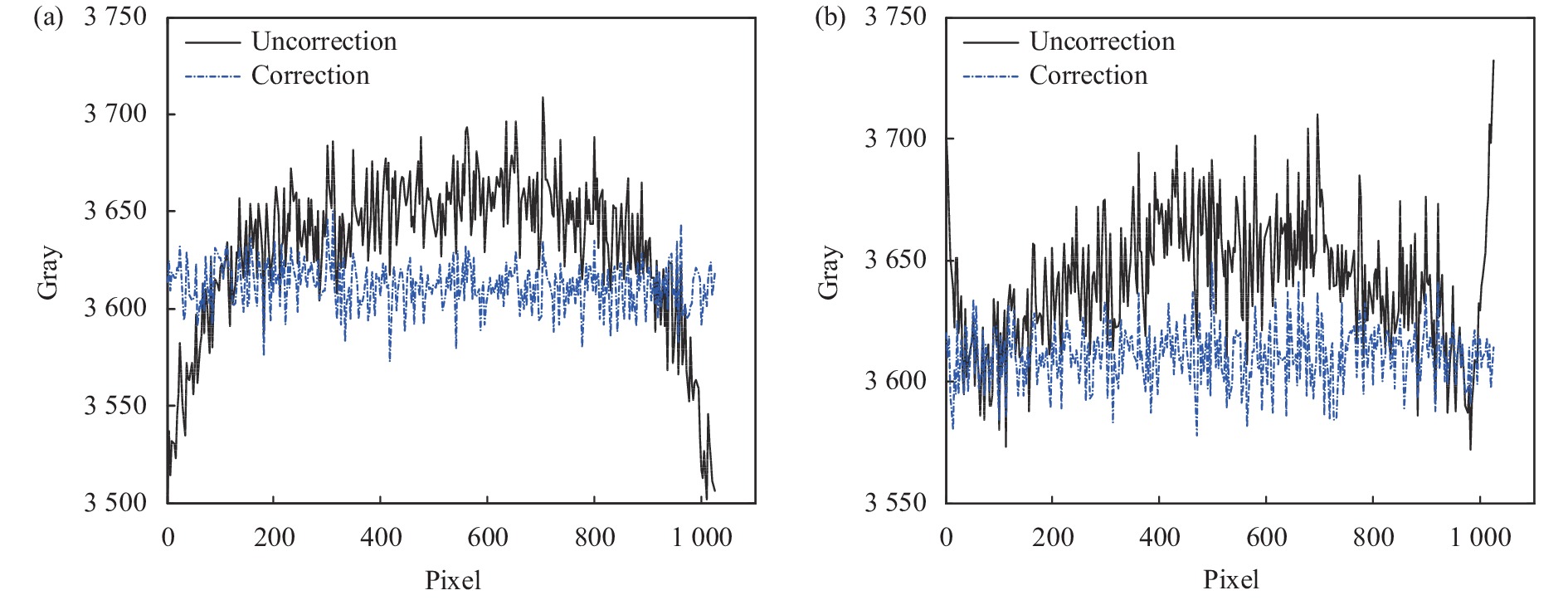
图 8 约CCD饱和灰度90%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 8. Distribution before and after correction of ninety percent of approximate CCD full gray: (a) Row direction; (b) Column direction
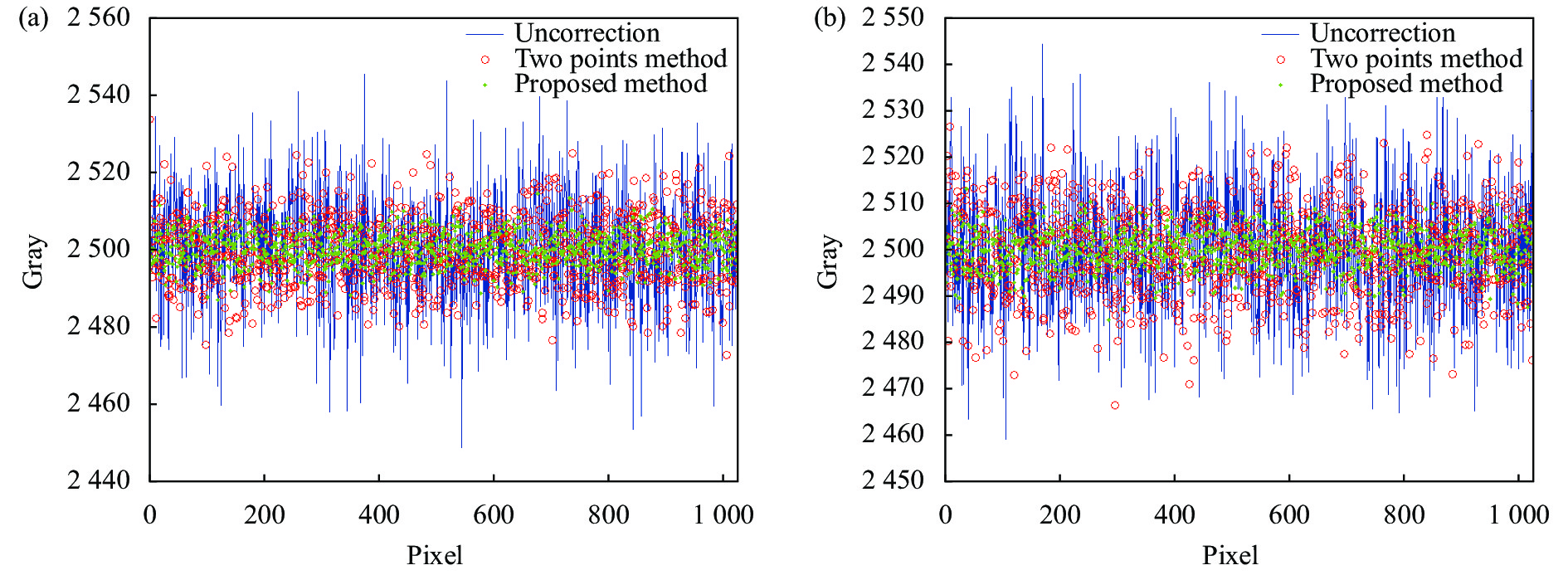
分别采用文中所提方法和两点定标方法对CCD探测器的面响应非均匀性进行校正,校正结果比对如图9所示。未进行校正时CCD探测器面响应调制度为1.42,对比度为0.014,采用两点定标方法校正后的CCD探测器面响应调制度为1.12,对比度为0.01,而采用文中所提方法校正后的探测器面响应调制度为1.08,对比度为0.004。
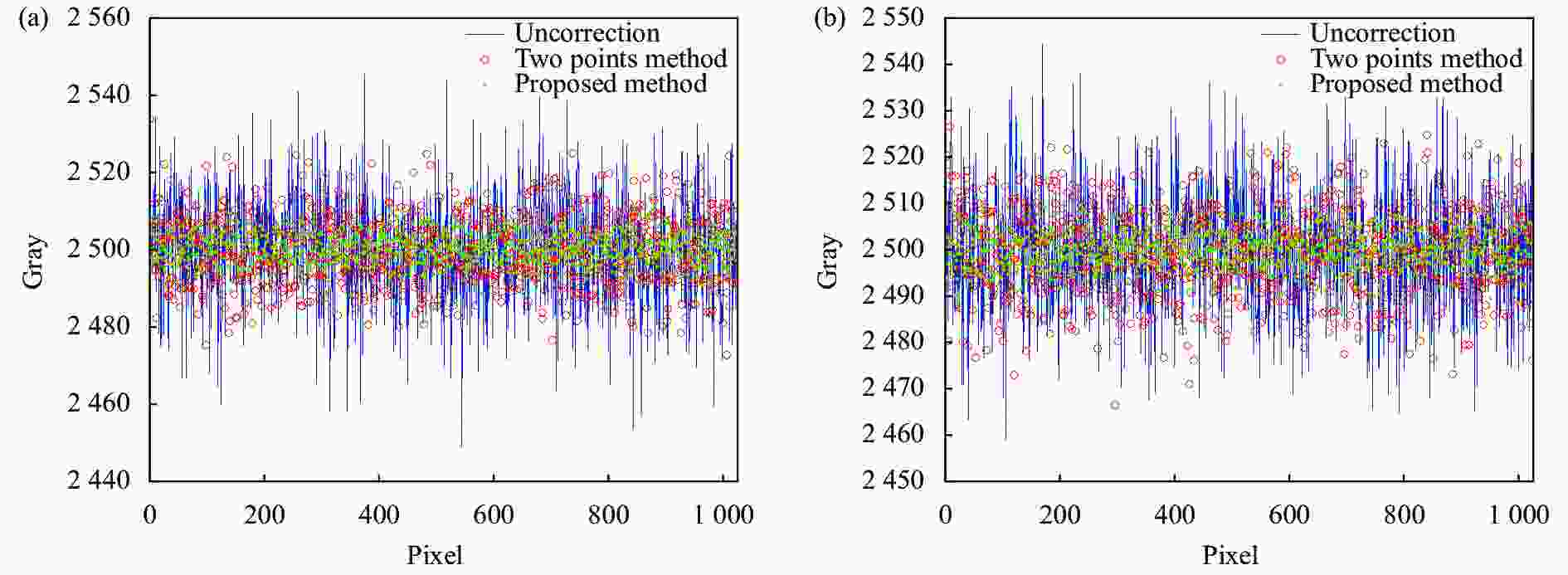
图 9 两点法与所提方法校正结果对比: (a)行方向;(b)列方向
Figure 9. Comparison of correction results between the two-point method and the proposed method: (a) Row direction; (b) Column direction
-
文中提出一种高能激光惯性约束聚变系统近场参数测量中的光强探测器面响应非均匀性校正方法,避免了二点定标校正法、多点定标分段校正法的缺点,同时也避免了自适应校正算法的复杂性。采用研制的校正装置,通过基于多点定标的最小二乘法线性拟合算法,计算出两个校正矩阵因子,并在不同灰度等级下对光强探测器所采集图像进行校正。通过对光强探测器面响应均匀性的调制度与对比度计算,结果表明校正后光强探测器的面响应均匀性大幅提高。
Surface response correction method of light intensity detector in high energy laser measurement
-
摘要: 为了降低光强探测器面响应非均匀性对高能激光惯性约束聚变(ICF)装置近场参数测量的影响,提出了一种高能激光近场参数测量中的光强探测器面响应非均匀性校正方法。理论方面推导了基于高能激光近场空域评价因子的多点线性定标校正模型,并设计及搭建了高均匀性线性输出的光强探测器面响应非均匀性自动校正装置。为了验证所提方法的有效性,对某型号科学级CCD的面响应非均匀性进行校正,探测器面响应调制度由1.42降至1.08,对比度由0.014降至0.004,相比两点定标方法,采用文中所提方法校正后光强探测器的均匀性大幅提高。结果表明,该方法可为高能激光ICF装置参数测量中的光强探测器面响应均匀性校正提供一种有效的技术手段。Abstract: In order to reduce the influence of the non-uniformity of the surface response of the intensity detector on the near field parameter measurement for the high-energy laser inertial confinement fusion device (ICF), a correction method for the non-uniformity of the light-intensity detector surface response in the near-field parameter measurement of the high-energy laser was proposed. Theoretically, a multi-point calibration linear correction model based on the high-energy laser near-field spatial evaluation factor was deduced, and a non-uniformity automatic correction device on surface response for high-uniformity linear output light intensity detector was designed and built. In order to verify the effectiveness of the proposed method, the surface response non-uniformity of a certain type of scientific-grade CCD was corrected. The surface response modulation degree of the detector was reduced from 1.42 to 1.08, and the contrast was reduced from 0.014 to 0.004. Compared with the two-point calibration method, the uniformity of the light intensity detector after correction using the proposed method in this article was greatly improved. The results show that this method can provide an effective technical means for the correction of the uniformity of the surface response of the light intensity detector in the parameter measurement of the high-energy laser ICF device in my country.
-
Key words:
- measurement /
- non-uniformity of surface response /
- modulation degree /
- contrast
-
图 1 光强探测器面响应非均性校正装置图
Figure 1. The diagram of the correction device for the surface response non-uniformity of the light intensity detector
图 4 探测器标定位置处照度均匀性原理图
Figure 4. Schematic diagram of illumination uniformity at the calibration position of the detector
图 5 校正光源均匀性仿真结果
Figure 5. Simulation results of the uniformity of the corrected light source
图 6 约CCD饱和灰度10%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 6. Distribution before and after correction of ten percent of approximate CCD full gray: (a) Row direction; (b) Column direction
图 7 约CCD饱和灰度50%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 7. Distribution before and after correction of fifty percent approximate of CCD full gray: (a) Row direction; (b) Column direction
图 8 约CCD饱和灰度90%处校正前后的分布曲线:(a)行方向;(b)列方向
Figure 8. Distribution before and after correction of ninety percent of approximate CCD full gray: (a) Row direction; (b) Column direction
图 9 两点法与所提方法校正结果对比: (a)行方向;(b)列方向
Figure 9. Comparison of correction results between the two-point method and the proposed method: (a) Row direction; (b) Column direction
表 1 积分球设计参数
Table 1. Parameters of integral ball
Parameter of first integrating sphere Inner diameter of integrating sphere/mm Size of light entrance/mm Diameter of one-time baffle/mm Size of light exit/mm Φ150 Φ12 Φ15 Φ30 Parameter of second integrating sphere Inner diameter of integrating sphere/mm Size of light entrance/mm Size of light exit/mm Φ150 Φ30 Φ40  下载: 导出CSV
下载: 导出CSV
表 2 调制度与对比度校正前后比较
Table 2. Comparison of modulation degree and contrast before and after correction
Source intensity CCD
average valueUncorrection Correction Modulation degree Contrast Modulation degree Contrast 1 429 1.08 0.017 1.05 0.011 2 510 1.07 0.016 1.05 0.009 3 584 1.07 0.015 1.05 0.009 4 667 1.07 0.015 1.04 0.008 5 746 1.11 0.015 1.04 0.008 6 830 1.17 0.015 1.04 0.007 7 911 1.21 0.015 1.03 0.007 8 995 1.24 0.014 1.03 0.007 9 1082 1.27 0.015 1.03 0.007 10 1165 1.29 0.014 1.03 0.006 11 1258 1.28 0.015 1.03 0.006 12 1344 1.32 0.015 1.04 0.006 13 1428 1.34 0.014 1.05 0.006 14 1518 1.34 0.015 1.05 0.006 15 1607 1.36 0.014 1.06 0.005 16 1695 1.37 0.014 1.06 0.005 17 1870 1.39 0.014 1.07 0.005 18 1960 1.39 0.014 1.07 0.005 19 2052 1.41 0.014 1.08 0.005 20 2145 1.41 0.014 1.08 0.005 21 2232 1.40 0.0143 1.07 0.005 22 2322 1.41 0.014 1.08 0.005 23 2415 1.40 0.014 1.07 0.005 24 2511 1.42 0.014 1.08 0.004 25 2602 1.42 0.014 1.08 0.004 26 2696 1.42 0.014 1.08 0.004 27 2785 1.42 0.014 1.08 0.004 28 2880 1.42 0.014 1.08 0.004 29 2977 1.38 0.015 1.05 0.004 30 3062 1.34 0.014 1.02 0.004 31 3160 1.30 0.014 1.02 0.004 32 3254 1.26 0.014 1.02 0.004 33 3351 1.22 0.015 1.02 0.004 34 3447 1.19 0.015 1.02 0.004 35 3534 1.11 0.014 1.02 0.004 36 3635 1.11 0.014 1.02 0.004
下载: 导出CSV
-
[1] Peng Hansheng, Zhang Xiaomin, Fan Dianyuan, et al. Status of high-power solid-state lasers and engineering science [J]. Engineering Science, 2001, 3(3): 1-8. (in Chinese) doi: 10.3969/j.issn.1009-1742.2001.03.001 [2] Ruff J A, Siegman A E. Single-pulse laser beam quality measurements using a CCD camera system [J]. Appl Opt, 1992, 31(24): 4907-4909. doi: 10.1364/AO.31.004907 [3] Wei Xiaofeng, Zheng Wanguo, Zhang Xiaomin. Two breakthroughs in the development of high-power solid-state laser technology in China [J]. Physics, 2018, 47(2): 73-82. (in Chinese) doi: 10.7693/wl20180202 [4] 苏毅, 万敏, 高能激光系统[M]. 北京: 国防工业出版社, 2003: 247-264. Su Yi, Wan Min. High Energy Laser System[M]. Beijing: National Defense Industry Press, 2003: 247-264. (in Chinese) [5] de Lasarte Marta, Pujol Jaume, Arjona Montserrat, et al. Optimized algorithm for the spatial nonuniformity correction of an imaging system based on a charge-coupled device color camera [J]. Appl Opt, 2007, 46(2): 167-174. doi: 10.1364/AO.46.000167 [6] Cheng Wang, Lv Qunbo, Zhao Na. Non-Uniformity correction of scientific CMOS image sensor based on FPGA [J]. Semiconductor Optoelectronics, 2016, 37(6): 873-889. (in Chinese) [7] Yu Haitao, Ma Jinpeng, Fan Yun, et al. Theory of nonuniformity related to spectrum response in IR imaging system [J]. Infrared and Laser Engineering, 2019, 48(2): 0204002. (in Chinese) doi: 10.3788/IRLA201948.0204002 [8] Vera Esteban, Meza Pablo, Torres Sergio. Total variation approach for adaptive nonuniformity correction in focal-plane arrays [J]. Opt Lett, 2011, 36(2): 172-174. doi: 10.1364/OL.36.000172 [9] Zhu Ruifei, Wang Chao, Wei Qun, et al. Manufacture of nonuniformity correction system for infrared detector [J]. Infrared and Laser Engineering, 2013, 42(7): 1669-1673. (in Chinese) [10] Irani Rahaghi A, Lemmin U, Sage D, et al. Achieving high-resolution thermal imagery in low-contrast lake surface waters by aerial remote sensing and image registration [J]. Remote Sensing of Environment, 2019, 221: 773-783. doi: 10.1016/j.rse.2018.12.018 [11] Shi Y, Zhang T, Cao Z, et al. A feasible approach for nonuniformity correction in IRFPA with nonlinear response [J]. Infrared Physics & Technology, 2005, 46(4): 329-337. doi: 10.1016/j.infrared.2004.05.003 [12] Hu C, Bai Y, Tang P. Denoising algorithm for the pixel-response non-uniformity correction of a scientific CMOS under low light condition [J]. ISPRS - International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2016, XLI-B3: 749-753. doi: 10.5194/isprs-archives-XLI-B3-749-2016 [13] Zhou H, Liu S, Lai R, et al. Solution for the nonuniformity correction of infrared focal plane arrays [J]. Appl Opt, 2005, 44(15): 2928-2932. doi: 10.1364/AO.44.002928 [14] Li Yiyang, Jin Weiqi, Zhu Jin, et al. An adaptive deghosting method in neural network-based infrared detectors nonuniformity correction [J]. Sensors(Basel), 2018, 18(1): 211. doi: 10.3390/s18010211 [15] 王庆有. 图像传感器应用技术[M]. 电子工业出版社, 2013.90-99. Wang Qingyou. Technology of Image Sensor Application[M]. Beijing: Publishing House of Electronics Industry, 2013: 90-99. (in Chinese) [16] 苏大图. 光学测量与象质鉴定[M]. 北京工业学院, 1988: 122-125. Su Datu. Optical Measurement and Image Quality Identification[M]. Beijing: Beijing Institute of Technology Press, 1988: 122-125. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 233
- HTML全文浏览量: 99
- PDF下载量: 11
- 被引次数: 0














































