






-
近年来,航天事业发展迅猛,卫星、飞船和星球探测器等航天器主要依靠火箭运载进入太空,面对趋于繁重与复杂的航天发射任务,应对不断发展的航天需求,对于提高运载火箭可靠性的需求愈加强烈。
火箭起飞漂移量是指运载火箭起飞过程中由于各种干扰而引起的质心相对基准弹道的偏移[1]。在火箭点火起飞至离开发射塔架前,由于对火箭的实时控制一般存在一定的延迟和超调,致使火箭不可避免地出现摆动,其在垂直起飞段表现为横向漂移。为了确保火箭起飞阶段不会碰到发射塔架,从而对火箭漂移量数据的实时性与测量精度提出了较高的要求。
目前火箭起飞漂移量主要依靠多台高速电视测量仪交会测量实现[2-3],由于其综合考虑了跟踪测量视场覆盖和兼顾初始段弹道测量,并没有对火箭起飞漂移量测量精度进行最优设计,致使其对起飞漂移量测量精度偏低,仅能达到分米量级,虽能满足部分型号火箭起飞漂移量的测量精度要求,但不能满足一些特定火箭,特别是某些新型号火箭对起飞漂移量测量的精度要求。此外,高速电视交会测量方法得到的测量信息包括高帧频的图像和数据,数据量一般很大,数据处理存在图像判读误差且处理时间长,不能实时获取漂移量。着眼新时期航天发射场火箭发射趋势,需要装备更高精度的火箭起飞漂移量测量系统,以弥补现有系统在火箭起飞漂移量测量精度偏低、受外界环境影响大和测量数据不能实时获取的不足,满足某些新型火箭对起飞漂移量测量的需求。
针对上述火箭漂移量测量技术现状,考虑到激光雷达具有高精度、全天时测量、高分辨率和功耗低等优点[4-6],文中利用激光雷达主动扫描代替传统的高速成像方式,提出了基于激光雷达的火箭起飞实时漂移量主动测量方法。实现对火箭目标的全天时漂移量测量,大幅提高了漂移量测量精度,实现了实时高精度火箭起飞漂移量的数据输出。
火箭实时高精度漂移量可为火箭发射安控台提供实时判别数据,保证发射过程安全。还可用于评定火箭的飞行控制性能,为发动机的改进设计、发射架设计和安全控制提供重要的依据,同时可为后续发射塔架的设计提供参考,具有重要的工程应用价值。
-
火箭起飞阶段会喷出大量的尾焰,为了消除火箭尾焰对激光雷达的影响,对火箭尾焰的吸收光谱进行分析。火箭发动机尾焰中参与光谱辐射的气体成分主要有 H2O、HCl、N2、O2、CO2、CO和OH等[7],其辐射光谱如表1所示。
表 1 光谱划分区间及主要辐射成分
Table 1. Spectral division and main radiation components
Serial number Spectral division/μm Radiation components 1 6.25-10 H2O 2 5.1-6.25 H2O 3 4.65-5.1 CO 4 4.1-4.65 CO2, CO 5 3.2-4.1 HCl 6 2.63-3.2 H2O, CO2 7 2.2-2.63 H2O, CO 由表1可知,火箭发动机尾焰中常见气体典型谱带集中在2~5 μm处。因此,在火箭起飞阶段,应选用波长低于2 μm的激光雷达,从而避开尾焰光谱的影响与干扰。同时,考虑到激光雷达波长对人眼的安全性,波长应不小于1.06 μm。综上,文中采用1550 nm波长的镭神智能MS03-A500激光雷达。
-
在火箭起飞的过程中,由于火箭尾焰对发射场的冲击,激光雷达会极大地受到地面振动的影响,通过实际发射环境测试,并对振动数据进行分析。
将加速度传感器[8]安装在发射场测量点位的隔振平台上,在火箭发射过程中,采集时域振动响应信号,振动响应持续时间约15 s。振动开始后,振动量级迅速增大至0.06 G,并持续约3 s,之后振动响应迅速增大,约8 s后达到峰值,之后逐渐衰减,约20 s后衰减至噪声水平量级。
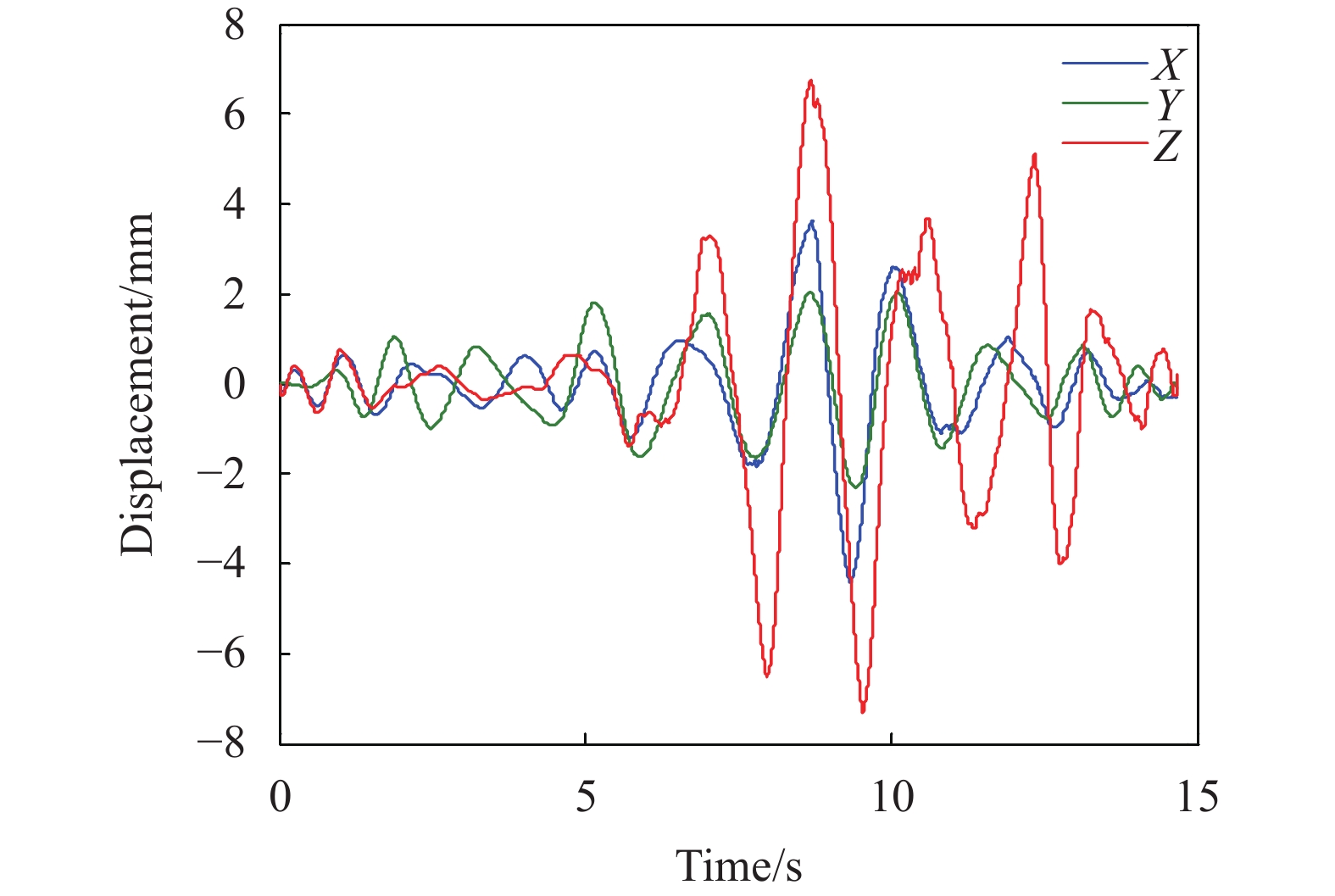
根据坐标系定义,以振动测量设备中心为原点,X轴正向由测点指向火箭,Z轴正向垂直于水平面指向发射方向,Y轴、X轴和Z轴构成右手坐标系。时域测量结果表明,Z轴振动响应最大,瞬时大于1.5 G,X轴与Y轴瞬时峰值响应约为0.8 G。对振动加速度值进行两次积分,得到隔振台的振动位移曲线如图1所示。
由图1可计算得到X、Y、Z三个方向引起的最大振动位移量之和约为9 mm。采用同样的方法将加速度计安装在没有隔振台的测量点位,得到的振动幅值约为有隔振台的5倍,同理可以得出在没有隔振台时,振动引起的最大位移量约为45 mm。振动引起的位移量越小对激光雷达的测量误差影响越小。
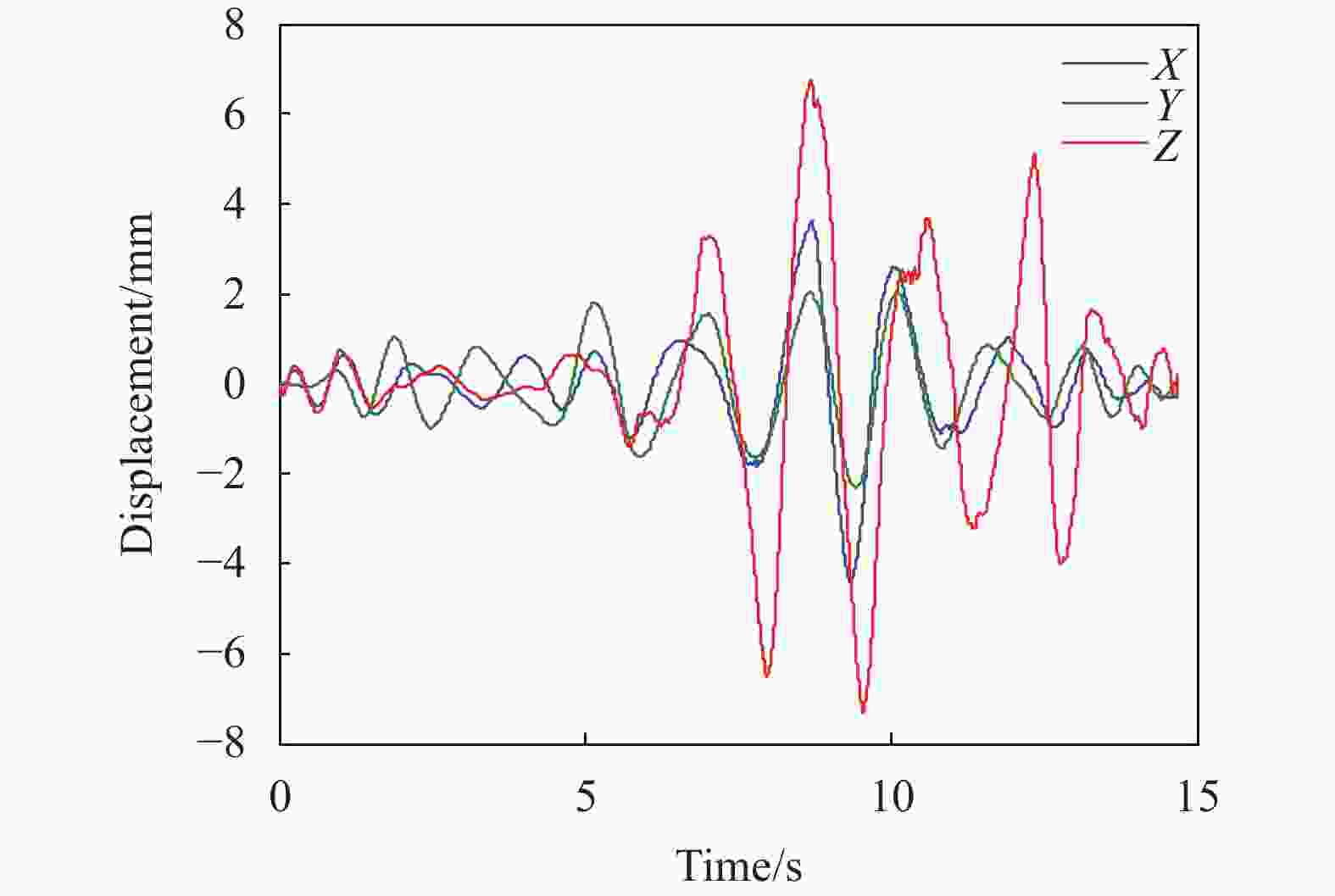
图 1 振动响应位移曲线
Figure 1. Vibration response displacement curves
综上,为了减少火箭尾焰对激光雷达的振动冲击影响,提高漂移量的测量精度,需将激光雷达测量系统安装在隔振台上。
-
由于发射塔架的高度一般高于火箭箭体,固定激光雷达扫描测量火箭时,单台激光雷达无法测量火箭起飞到出塔架的完整过程。因此,在工程应用中,将激光雷达与二维精密转台(型号为XX-1302光电经纬仪设备,静态测角精度为8")相结合,通过二维精密转台带动激光雷达高精度跟踪火箭目标点位置,从而实现对火箭起飞阶段全过程实时漂移量测量。
经过多次试验验证,激光雷达在高温尾焰的遮挡下无法获取到有效数据,为了尽可能避开尾焰的干扰,将激光雷达通过安装台安装在二维精密转台上,通过调节安装台的仰角位置,使激光雷达以一定的仰角固定扫描火箭的中上部。
综上所述,将激光雷达通过安装台安装在二维精密转台上,再将测量系统安装在发射场区测量点位的隔振平台上,尽可能减少振动引起的测量误差。构成激光主动漂移量测量系统,测量系统组成示意图如图2所示。
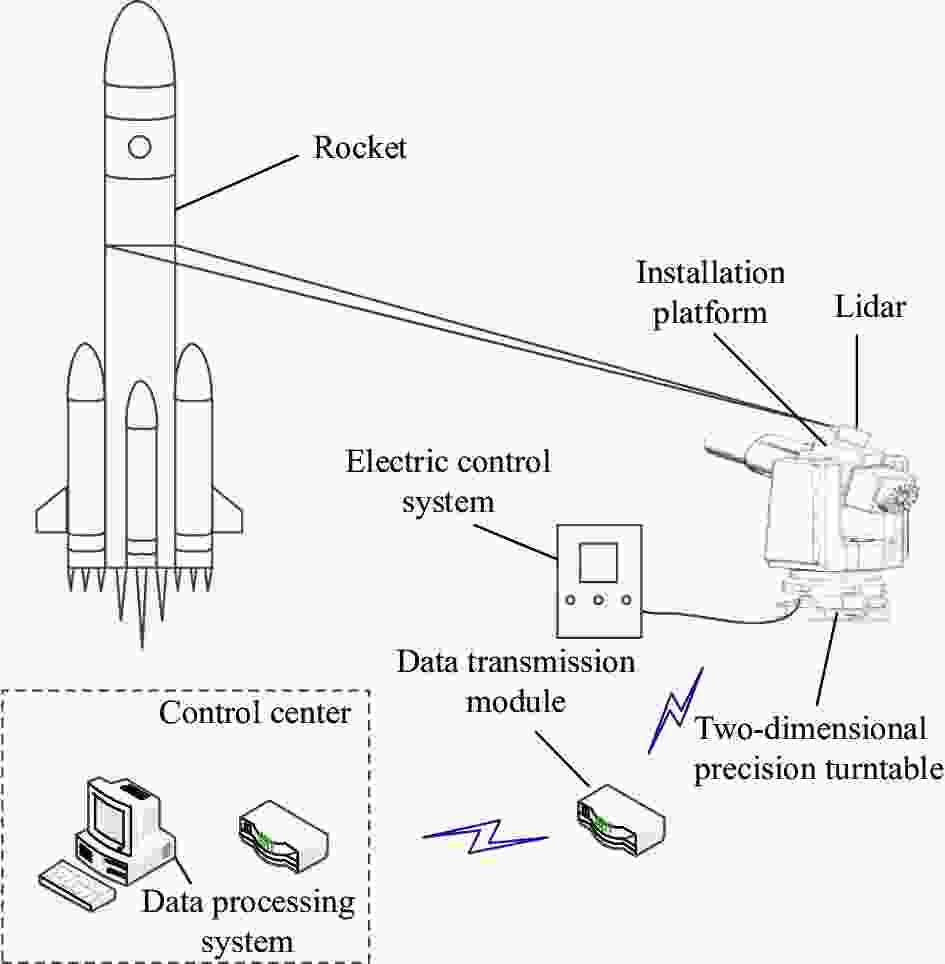
图 2 测量系统组成示意图
Figure 2. Composition diagram of measuring system
测量系统的完整测量过程为:首先测量火箭静止状态时的椭圆圆心位置作为基准位置。调整安装台至合适的水平角和俯仰角,火箭起飞过程中,二维精密转台高精度跟踪火箭,带动激光雷达持续扫描火箭中上部的目标点位置,数据处理系统接收激光点云数据,并根据激光点云数据拟合每一帧扫描数据的椭圆曲线及其圆心位置,根据每一帧数据的椭圆圆心位置与基准位置的相对差值,确定火箭在起飞阶段的实时漂移量。
-
针对火箭主动漂移量测量系统及测量方法,最核心与关键的技术是激光点云数据的处理算法和测量系统的测量精度分析,现将这两种关键技术描述如下。
-
将火箭的第一级与第二级箭体等效为圆柱体,激光雷达以一定的仰角扫描火箭目标,激光扫描面与火箭柱体不垂直,因此,扫描得到的激光点云坐标位置会位于一个椭圆上,如图3所示。
激光点云坐标[9]可通过测量的距离和角度信息解算得到,再通过拟合多个测量点组成的椭圆曲线,可减弱单个点测量所引入的误差。
在二维平面坐标系中任意位置的一个椭圆,椭圆方程通式为:
$$ {x^2} + Axy + B{y^2} + Cx + Dy + E = 0 $$ (1) 式中:
$ A、B、C、D、E $ 为椭圆曲线的参数。在原始测得的
$N$ 组数据$\left( {{x_i},{y_i}} \right)(i = 1,2, \cdots ,n)$ 中,根据椭圆方程通式和最小二乘法原理[10]求目标函数:$$ \begin{split} & F(A,B,C,D,E) =\\ &\sum\limits_{i = 1}^N {({x_i}^2 + A{x_i}{y_i} + B{y_i}^2 + C{x_i} + D{y_i} + E} {)^2} \\ \end{split} $$ (2) 目标函数的最小值确定参数为:
$ A、B、C、D、E $ 。令$F(A, B, C, D, E)$ 对各个参数的偏导数均为零,得到以下方程组:$$ \left[ {\begin{array}{*{20}{c}} {\displaystyle\sum\limits_{i = 1}^N {x_i^2y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^3} }&{\displaystyle\sum\limits_{i = 1}^N {x_i^2{y_i}} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}{y_i}} } \\ {\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^3} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^4} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^3} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^2} } \\ {\displaystyle\sum\limits_{i = 1}^N {x_i^2{y_i}} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {x_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}{y_i}} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}} } \\ {\displaystyle\sum\limits_{i = 1}^N {{x_i}y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^3} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}{y_i}} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {{y_i}} } \\ {\displaystyle\sum\limits_{i = 1}^N {{x_i}{y_i}} }&{\displaystyle\sum\limits_{i = 1}^N {y_i^2} }&{\displaystyle\sum\limits_{i = 1}^N {{x_i}} }&{\displaystyle\sum\limits_{i = 1}^N {{y_i}} }&N \end{array}} \right]\left[ {\begin{array}{*{20}{c}} A \\ B \\ C \\ D \\ E \end{array}} \right] = \left[ {\begin{array}{*{20}{c}} {\displaystyle\sum\limits_{i = 1}^N {x_i^3{y_i}} } \\ {\displaystyle\sum\limits_{i = 1}^N {x_i^2y_i^2} } \\ {\displaystyle\sum\limits_{i = 1}^N {x_i^3} } \\ {\displaystyle\sum\limits_{i = 1}^N {x_i^2{y_i}} } \\ {\displaystyle\sum\limits_{i = 1}^N {x_i^2} } \end{array}} \right] $$ (3) 上式中各项,除
$ A、B、C、D、E $ 外都可从测量的激光点云数据中解算得到,求解以上线性方程组,最终可得椭圆方程参数[11],进而可得拟合的椭圆曲线方程:$$ \left\{ {\begin{array}{*{20}{l}} {{x_0} = \dfrac{{2BC - AD}}{{{A^2} - 4B}}} \\ {{y_0} = \dfrac{{2D - AD}}{{{A^2} - 4B}}} \\ {a = \sqrt {\dfrac{{2(ACD - B{C^2} - {D^2} + 4BE - {A^2}E)}}{{({A^2} - 4B)(B - \sqrt {{A^2} + {{(1 - B)}^2}} + 1)}}} } \\ {b = \sqrt {\dfrac{{2(ACD - B{C^2} - {D^2} + 4BE - {A^2}E)}}{{({A^2} - 4B)(B + \sqrt {{A^2} + {{(1 - B)}^2}} + 1)}}} } \\ {\theta = {\rm{arctan}}\left( {\sqrt {\left( {\dfrac{{{a^2} - {b^2}B}}{{{a^2}B - {b^2}}}} \right)} } \right)} \end{array}} \right. $$ (4) 式中:椭圆圆心坐标为
$\left( {{x_0},{y_0}} \right)$ ;半长轴为$a$ ;半短轴为$b$ ;长轴偏角为$\theta $ 。上述拟合得到的椭圆曲线位于一个激光扫描面内,结合对应安装台与二维精密转台的水平与俯仰角度信息,可解算得到椭圆曲线圆心所对应的三维空间坐标。
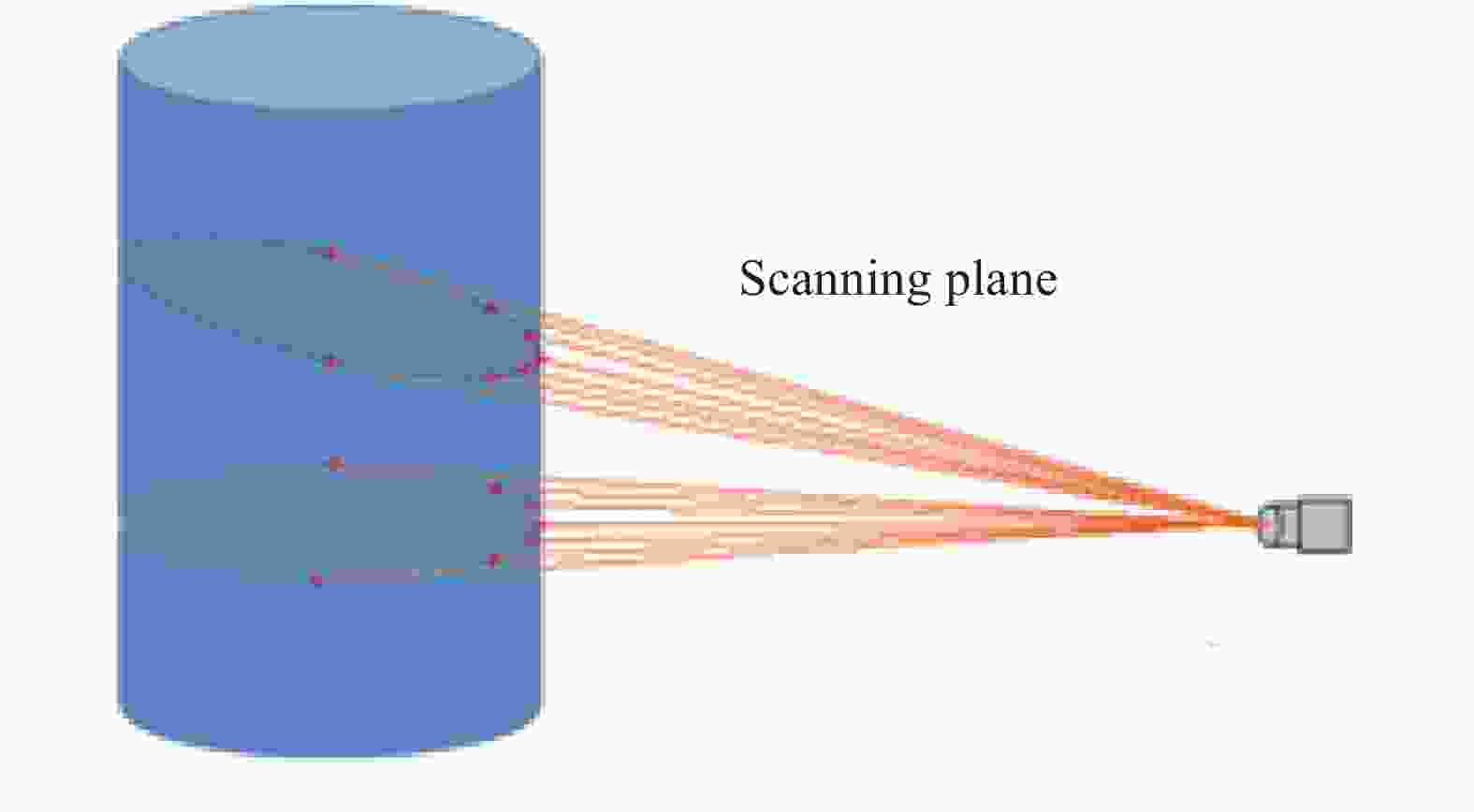
图 3 激光扫描切面示意图
Figure 3. Schematic diagram of laser scanning plane
-
(1) 无环境干扰静态漂移量测量精度
无环境干扰静态漂移量测量精度指火箭静止状态下的漂移量,静止时火箭漂移量真值为0,文中通过拟合并计算不同时刻火箭静止时椭圆圆心位置的相对差值来确定火箭静止漂移量测量精度。
无环境干扰漂移量测量精度主要影响因素包括:火箭箭体的圆度误差、椭圆拟合误差、圆心拟合误差以及安装台与二维精密转台的角度误差,将各项影响因素的误差总和记为
$\Delta {d_i}$ ,通过测量并拟合求取静态时箭体的漂移量测量误差[12],测量多次并计算漂移量的均方根值作为无环境干扰漂移量测量精度。均方根误差RMSE静态(Root Mean Squared Error)计算公式如下:$$ RMS{E}_{静态}=\sqrt{\frac{{\displaystyle \sum _{i=1}^{n}\Delta {d}_{i}^{2}}}{n}} $$ (5) 式中:
$\Delta {d_i}$ 为无环境干扰漂移量测量精度主要影响因素的误差之和;$n$ 为数据样本数。(2) 有环境干扰动态漂移量测量精度
在火箭发射过程中,目前的漂移量测量设备无法得到火箭起飞漂移量的更高精度真值来标定激光雷达的动态漂移量测量精度。因此,文中通过精度分析来获得火箭起飞过程的动态漂移量测量精度,在火箭发射的环境干扰下,除了自身静态的漂移量测量误差,还包括有尾焰冲击波导致的振动影响误差、尾焰及尾焰光谱干扰影响误差和测量系统跟踪引起的测量误差(此处简称跟踪误差),在环境干扰下的动态漂移量测量精度用均方根进行表示为:
$$ RMS{E}_{动态}=\sqrt{\frac{{\displaystyle \sum _{i=1}^{n}(\Delta {d}_{i}^{2}+\Delta {d}_{v}^{2}+\Delta {d}_{f}^{2}+\Delta {d}_{g}^{2})}}{n}} $$ (6) 式中:
$\Delta {d_v}$ 为尾焰冲击波导致的振动影响误差;$\Delta {d_f}$ 为尾焰及尾焰光谱干扰影响误差;$\Delta {d_g}$ 为测量系统跟踪误差;$n$ 为数据样本数。 -
根据某发射场区的环境,将测量系统布设在距离火箭300 m处有隔振平台的测量点位,如图4所示。
图 4 火箭漂移量试验场景图
Figure 4. Rocket drift test scenario
测量系统采用单线扫描激光雷达[13],型号为镭神智能MS03-A500,测量精度为±2 cm,测量帧频为40 Hz,水平视场角120°,水平角分辨率为0.025°。
-
首先测量火箭静止状态下的漂移量,将其作为火箭起飞阶段动态漂移量的基准值。分别采集多帧火箭静止状态下的激光点云位置数值,如表2所示。表2中每一列为一帧激光点云数据换算后的空间坐标和该帧对应的漂移量,每帧测量数据在椭圆面共包含八个点的空间坐标。
表 2 火箭静止漂移量测量数值
Table 2. Measurement values of rocket static drift
Data points/frame 1st frame coordinates 2nd frame coordinates 3rd frame coordinates 1 (−1148.7;726.9;0) (−1146.3;729.3;0) (−1147.1;732.2;0) 2 (−1196.1;673.6;0) (−1193.8;674.9;0) (−1193.5;675.4;0) 3 (−1239.6;639.9;0) (−1235.9;641.2;0) (−1237.5;637.3;0) 4 (−1264.6;631.3;0) (−1262.1;635.3;0) (−1262.4;633.6;0) 5 (−1315.4;623.1;0) (−1313.9;624.6;0) (−1314.9;625.2;0) 6 (−1361.7;623.8;0) (−1358.6;620.5;0) (−1360.2;622.1;0) 7 (−1414.9;640.9;0) (−1412.4;638.6;0) (−1413.8;642.6;0) 8 (−1469.7;673.1;0) (−1467.1;675.1;0) (−1467.8;677.3;0) Drift/cm 0(reference value) 0.83 1.13 Data points/frame 4th frame coordinates 5th frame coordinates 6th frame coordinates 1 (−1146.9;728.9;0) (−1146.6;728.9;0) (−1145.4;731.2;0) 2 (−1193.9;675.7;0) (−1194.9;675.6;0) (−1188.8;676.6;0) 3 (−1235.7;635.4;0) (−1236.8;640.6;0) (−1235.2;638.5;0) 4 (−1261.5;632.9;0) (−1261.3;634.8;0) (−1261.5;634.5;0) 5 (−1312.9;624.4;0) (−1313.2;623.8;0) (−1313.9;625.9;0) 6 (−1362.5;626.8;0) (−1359.8;621.4;0) (−1362.5;621.9;0) 7 (−1411.3;643.6;0) (−1414.2;639.8;0) (−1415.3;639.4;0) 8 (−1467.9;676.3;0) (−1468.7;673.1;0) (−1467.6;675.1;0) Drift/cm 1.60 0.64 1.32 将表2中各位置点数据代入公式(3)和(4)中解算出每帧数据的圆心位置,将第一帧的圆心位置作为基准位置,选取任意五帧数据的圆心位置与基准位置求相对差值,得到静态漂移量数值。各静态漂移量数据代入公式(5),计算得到激光雷达在无干扰静态漂移量测量误差为1.2 cm。
根据2.2节分析,尾焰冲击波导致的振动影响误差
$\Delta {d_v}$ 取值为0.9 cm。尾焰及尾焰光谱造成的误差包括尾焰及尾焰光谱干扰,其中尾焰光谱由表1和参考文献[14]可知谱带集中在2~5 μm处,文中采用的激光雷达波长为1550 nm,因此尾焰光谱影响较小,可忽略不计。但是火箭在发射过程中会产生大量浓密的尾焰气体,针对尾焰气体的干扰及影响,经过多次火箭发射试验测试,激光在穿过尾焰时,对激光测距的精度影响约为1.5 cm,综上,尾焰及尾焰光谱干扰引起的误差$\Delta {d_f}$ 取值为1.5 cm。二维精密转台的跟踪误差[15]包括转台的测角系统误差、轴系误差、晃动误差、调平误差、轴系倾斜误差和同步误差等几项,依据XX-1302的相关数据,XX-1302的跟踪误差约为15.4″,激光雷达距离火箭为300 m,则二维精密转台XX-1302的跟踪误差
$\Delta {d_g}$ 可以计算得到:$$ \Delta {d_g} = \sin (15.4/3\;600) \times 30\;000 \approx 2.2\;{\rm{cm}} $$ (7) 将以上各项误差数值代入公式(6),计算得到激光雷达在环境干扰下的动态漂移量测量精度为3.1 cm。
确定有环境干扰下动态漂移量测量精度后,将静态箭体的椭圆圆心位置作为初始基准位置。火箭发射过程中,二维精密转台带动激光雷达高精度跟踪火箭,使单线扫描激光雷达以一定的仰角固定持续扫描火箭的目标点位置,实时获取多帧激光点云测量数据,根据每一帧数据的椭圆圆心位置与基准位置的相对差值,确定火箭在起飞阶段的实时漂移量。
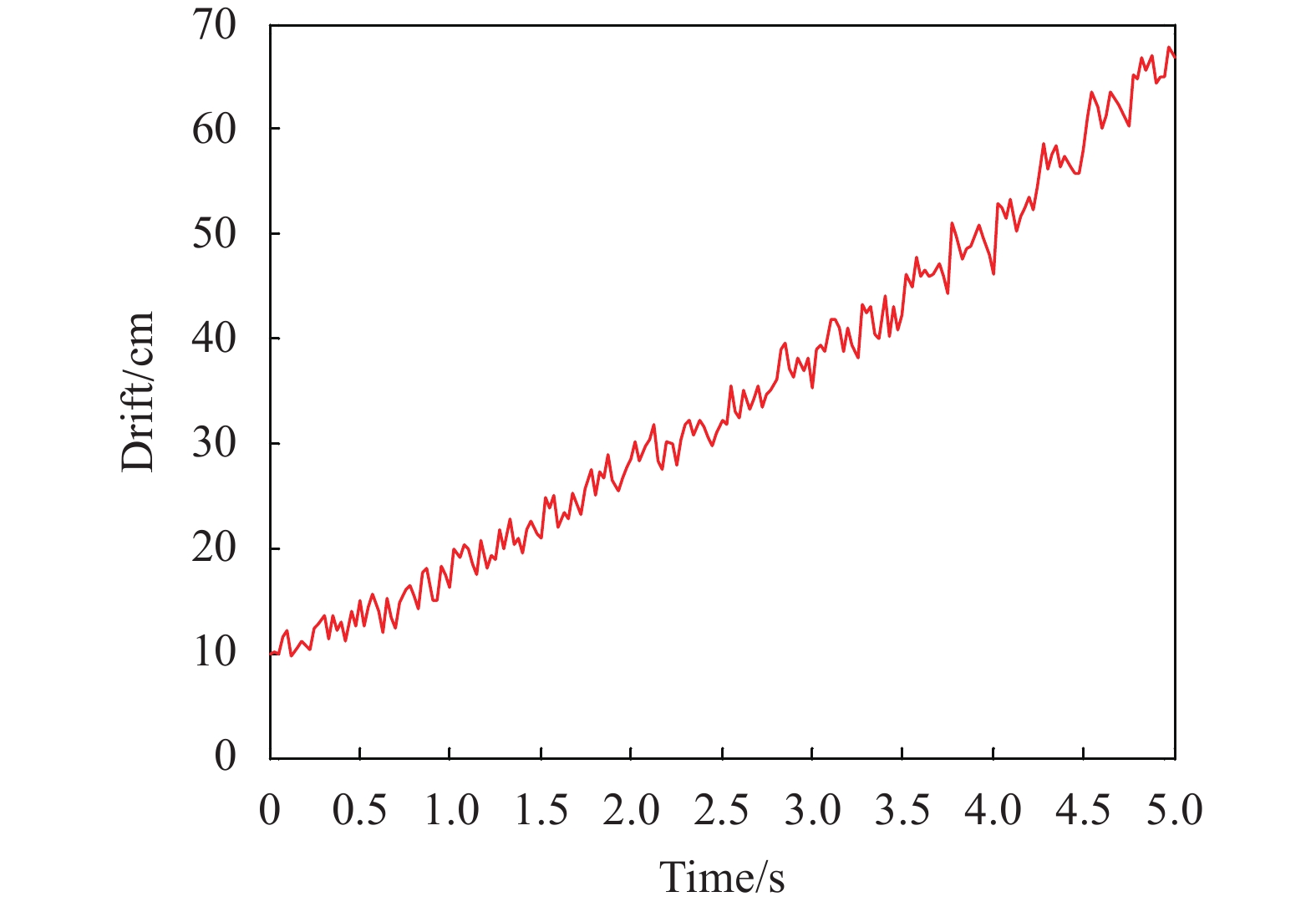
火箭发射过程中的漂移量测量数值随起飞时刻的变化如图5所示,火箭发射时,从启动(指有漂移量数据时刻)至离开塔架时间共计8 s,前3 s的漂移量变化较小,图5中包含火箭离开塔架前5 s内共200帧的漂移量数据。

图 5 火箭动态漂移量测量数值
Figure 5. Measurement values of rocket dynamic drift
由图5可知,火箭发射过程中漂移量逐渐增大,最大漂移量为火箭出塔架时的67.84 cm。
通过火箭发射试验验证,激光雷达测量系统实现了火箭起飞至出塔架的实时高精度漂移量测量,验证了文中提出的激光主动漂移量测量系统及测量方法的可行性与合理性。
-
针对现有高速电视交会测量火箭起飞漂移量存在受外界环境影响大和测量数据不能实时获取等问题,文中利用激光雷达具有高精度、高分辨率、易安装、体积小、全天时测量和功耗低等优势,采用激光主动扫描代替传统高速成像方式,提出了基于激光雷达的火箭起飞实时漂移量主动测量方法。首先将激光雷达通过安装台安装在二维精密转台,在火箭发射过程中,二维精密转台带动激光雷达持续高精度跟踪扫描火箭的目标点位置,获取目标点位置对应的激光点云数据。接着,利用数据处理系统接收激光点云数据,采用椭圆曲线及圆心拟合算法,分别计算得到火箭静止与动态时的圆心位置变化,确定火箭在起飞阶段的实时漂移量。最后,通过火箭发射试验验证文中提出的测量系统及测量方法,试验结果表明:在有环境干扰条件下,文中测量系统实现了火箭起飞阶段实时高精度的漂移量测量,实时漂移量测量精度可达到3.1 cm,与目前高速电视交会测量方法相比,精度从分米级提高到了厘米级,同时测量系统受天气等外界环境干扰较小,且能实时输出漂移量数值,为火箭发射安控台提供实时判别数据,保证发射过程安全。也为评定火箭的飞行控制性能、发射架设计和安全控制提供重要的依据,具有重要的工程应用价值。
Rocket active drift measurement technology based on lidar
-
摘要: 针对现有高速电视交会测量火箭漂移量受外界环境影响大和测量数据不能实时获取等问题,提出了基于激光雷达的火箭实时起飞漂移量主动测量方法。首先将激光雷达通过安装台安装在二维精密转台,在火箭发射过程中,二维精密转台带动激光雷达持续高精度跟踪扫描火箭的目标点位置,获取目标点位置对应的激光点云数据。接着,数据处理系统接收激光点云数据,拟合每一帧数据的椭圆曲线及其圆心位置,以火箭静止时椭圆圆心位置为基准位置,计算每一帧数据的椭圆圆心位置与基准位置的相对差值,确定火箭在起飞阶段的实时漂移量。最后,通过火箭发射试验验证文中提出的测量系统及测量方法,试验结果表明:在有环境干扰条件下,实时漂移量测量精度可达到3.1 cm,是目前火箭漂移量测量中精度最高的测量方法,同时可保证数据的实时性。为火箭发射的安控台提供了实时判别数据,保证了发射过程的安全。Abstract: In view of the problems existing in the current high-speed TV rendezvous measurement of rocket drift, such as the great influence of the external environment and the inability to obtain the measurement data in real time, an active measurement method of rocket takeoff real-time drift based on lidar is proposed. First, the lidar is installed on the two-dimensional precision turntable through the installation platform. In the process of rocket launch, the two-dimensional precision turntable drives the lidar to continuously track and scan the target point position of the rocket with high precision, and obtain the lidar point cloud data corresponding to the target point position. Then, the data processing system receives the lidar point cloud data, fits the elliptical curve and the elliptical curve center point of each frame data, takes the position of the elliptical center point when the rocket is stationary as the reference position, calculates the relative difference between the elliptical center point position of each frame data and the reference position, and determines the real-time drift of the rocket in the take-off stage. Finally, the measurement system and method are verified by the rocket launch test, and the test results show that under the condition of environmental interference, the measurement accuracy of real-time drift is 3.1 cm. It is the most accurate measurement method in the rocket drift measurement at present. At the same time, it can ensure the real-time performance of the data, provide real-time discrimination data for the rocket launch security console, and ensure the safety of the launch process.
-
Key words:
- lidar /
- rocket drift /
- curve fitting /
- measurement accuracy
-
表 1 光谱划分区间及主要辐射成分
Table 1. Spectral division and main radiation components
Serial number Spectral division/μm Radiation components 1 6.25-10 H2O 2 5.1-6.25 H2O 3 4.65-5.1 CO 4 4.1-4.65 CO2, CO 5 3.2-4.1 HCl 6 2.63-3.2 H2O, CO2 7 2.2-2.63 H2O, CO  下载: 导出CSV
下载: 导出CSV
表 2 火箭静止漂移量测量数值
Table 2. Measurement values of rocket static drift
Data points/frame 1st frame coordinates 2nd frame coordinates 3rd frame coordinates 1 (−1148.7;726.9;0) (−1146.3;729.3;0) (−1147.1;732.2;0) 2 (−1196.1;673.6;0) (−1193.8;674.9;0) (−1193.5;675.4;0) 3 (−1239.6;639.9;0) (−1235.9;641.2;0) (−1237.5;637.3;0) 4 (−1264.6;631.3;0) (−1262.1;635.3;0) (−1262.4;633.6;0) 5 (−1315.4;623.1;0) (−1313.9;624.6;0) (−1314.9;625.2;0) 6 (−1361.7;623.8;0) (−1358.6;620.5;0) (−1360.2;622.1;0) 7 (−1414.9;640.9;0) (−1412.4;638.6;0) (−1413.8;642.6;0) 8 (−1469.7;673.1;0) (−1467.1;675.1;0) (−1467.8;677.3;0) Drift/cm 0(reference value) 0.83 1.13 Data points/frame 4th frame coordinates 5th frame coordinates 6th frame coordinates 1 (−1146.9;728.9;0) (−1146.6;728.9;0) (−1145.4;731.2;0) 2 (−1193.9;675.7;0) (−1194.9;675.6;0) (−1188.8;676.6;0) 3 (−1235.7;635.4;0) (−1236.8;640.6;0) (−1235.2;638.5;0) 4 (−1261.5;632.9;0) (−1261.3;634.8;0) (−1261.5;634.5;0) 5 (−1312.9;624.4;0) (−1313.2;623.8;0) (−1313.9;625.9;0) 6 (−1362.5;626.8;0) (−1359.8;621.4;0) (−1362.5;621.9;0) 7 (−1411.3;643.6;0) (−1414.2;639.8;0) (−1415.3;639.4;0) 8 (−1467.9;676.3;0) (−1468.7;673.1;0) (−1467.6;675.1;0) Drift/cm 1.60 0.64 1.32
下载: 导出CSV
-
[1] Zhang Y, Wang H, Huang C, et al. Research of multi-constraints lift-off drift control for new generation large launch vehicle [J]. Missiles and Space Vehicles, 2021, 7(4): 7-10. (in Chinese) [2] 崔书华, 胡绍林. 设备误差对火箭垂直起飞漂移量的影响[J]. 弹箭与制导学报, 2006, 26(2): 1160-1162. doi: 10.3969/j.issn.1673-9728.2006.02.368 Cui Shuhua, Hu Shaolin. Equipment errors effect accuracy of drift-magnitude [J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2006, 26(2): 1160-1162. (in Chinese) doi: 10.3969/j.issn.1673-9728.2006.02.368 [3] 姜志富. 非同步相机测量火箭起飞漂移量方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2014. Jiang Zhifu. Research on the take-off drift of rocket based on nonsynchronous camera[D]. Harbin: Harbin Institute of Technology, 2014. (in Chinese) [4] Pittman S J, Costa B, Wedding L M. LiDAR Applications[M]//Coral Reef Remote Sensing. Netherlands, Holland: Springer, 2013. [5] Williams K, Olsen M, Roe G, et al. Synthesis of transportation applications of mobile LIDAR [J]. Remote Sensing, 2013, 5(9): 4652-4692. doi: 10.3390/rs5094652 [6] 裘家伟, 章振, 余赛芬, 魏天问, 袁金龙, 夏海云. 1.5微米大气探测激光雷达研究进展(特邀)[J]. 红外与激光工程, 2021, 50(3): 20210079. doi: 10.3788/IRLA20210079 Qiu Jiawei, Zhang Zhen, Yu Saifen, et al. Development of 1.5 μm lidar for atmospheric detection(Invited) [J]. Infrared and Laser Engineering, 2021, 50(3): 20210079. (in Chinese) doi: 10.3788/IRLA20210079 [7] 郑海晶. 火箭发动机尾焰多波段辐射特性研究[D]. 北京理工大学, 2018. Zheng H J. Reseach on multiband radiation characteristics of rocket engine exhaust plume[D]. Beijing: Beijing University of Technology, 2018. (in Chinese) [8] 刘兵. 航空发动机整机振动测量和分析方法[J]. 计算机测量与控制, 2019, 27(5): 22-25, 43. Liu B. Vibration measurement and analysis of aero-engine [J]. Computer Measurement and Control, 2019, 27(5): 22-25,43. (in Chinese) [9] 冯发杰, 丁亚洲, 吏军平, 黄星北, 刘欣怡. 使用显著性划分的机载激光雷达点云滤波[J]. 红外与激光工程, 2020, 49(8): 20190439. doi: 10.3788/IRLA20190439 Feng Fajie, Ding Yazhou, Li Junping, et al. Airborne LiDAR point cloud filtering using saliency division [J]. Infrared and Laser Engineering, 2020, 49(8): 20190439. (in Chinese) doi: 10.3788/IRLA20190439 [10] Lawiyuniarti M P, Rahmadiantri E, Alamsyah I M, et al. Application of least-squares fitting of ellipse and hyperbola for two dimensional data [J]. Journal of Physics: Conference Series, 2018, 948(1): 012069. doi: 10.1088/1742-6596/948/1/012069 [11] Li C Y, Wang H T, Jiang L X, et al. Center location algorithm based on gaussian processes model [J]. Journal of Geomatics Sciences and Technology, 2018, 35(6): 557-562. [12] 麻卫峰, 王金亮, 王成, 等. 电力线点云精细提取与重建的模型残差实现[J]. 测绘科学, 2020, 45(2): 60-66. Ma W F, Wang J L, Wang C, et al. Implementation of model residuals for fine extraction and reconstruction of power line point cloud [J]. Science of Surveying and Mapping, 2020, 45(2): 60-66. (in Chinese) [13] 王锐, 常锴, 符国浩, 等. 单线激光雷达与GNSS/INS的空间重构[J]. 光学精密工程, 2020, 28(4): 851-858. DOI: 10.3788/OPE.20202804.0851. Wang Rui, Chang Kai, Fu Guohao, et al. Space reconstruction using single-line LIDAR and GNSS/INS fused data [J]. Optics and Precision Engineering, 2020, 28(4): 851-858. (in Chinese) doi: 10.3788/OPE.20202804.0851 [14] 乔野, 聂万胜, 吴高杨, 等. 多喷管液体火箭动力系统尾焰辐射特性研究[J]. 导弹与航天运载技术, 2017(4): 53-58. doi: http://www.ddht1972.com/CN/10.7654/j.issn.1004-7182.20170413 Qiao Y, Nie W S, Wu G Y, et al. Research on plume infrared radiation of multi-nozzle rocket propulsion system [J]. Missiles and Space Vehicles, 2017, 3(4): 53-58. (in Chinese) doi: http://www.ddht1972.com/CN/10.7654/j.issn.1004-7182.20170413 [15] 柴敏, 胡绍林, 张伟. 靶场光电经纬仪跟踪精度评估技术[J]. 飞行器测控学报, 2013, 32(5): 403-407. Chai M, Hu S L, Zhang W. Tracking accuracy evaluation technology of photoelectric theodolite in shooting range [J]. Journal of Aircraft Measurement and Control, 2013, 32(5): 403-407. (in Chinese) -

 点击查看大图
点击查看大图
图(5) / 表(2)
计量
- 文章访问数: 186
- HTML全文浏览量: 46
- PDF下载量: 40
- 被引次数: 0




























