




 下载:
下载:





-
海洋温度和盐度等环境参数是海洋科学包括海洋动力、海洋环境、海水物理过程、化学过程和生物过程的基本参数,是海洋环境中最为重要的物理特性,利用高新技术手段进行海洋环境监测成为极具战略意义的前沿课题。
海洋遥感主要是利用不同频段上的电磁波进行环境监测,主要有光学[1-2]、红外[3-4]以及微波遥感[5-6]等多种方式。由于海水对微波和红外具有屏蔽作用,而在蓝绿光波段存在一个透过窗口,因此相对于微波或者红外只能测量海洋表层的环境信息,主动激光遥感具有快速获取海洋环境垂直剖面分布的优势,是海洋遥感的一种重要手段。
传统海洋激光雷达根据回波信号能量求解激光雷达方程来进行海水深度的测量或者叶绿素浓度的探测。由于海水信道强散射性和随机性带来了较强的后向散射噪声,因此,随着探测深度的增加,回波信号的信噪比快速减小。实际上激光与海水介质相互作用不仅在能量域上具有回波信号特征,在光谱域上同样具有回波信号特征。而且不同散射光谱表征的是激光与海水介质不同作用的结果,在光谱域上是可以进行区分的,因此在光谱域上通过测量可区分的不同散射光谱特征即可实现海洋的遥感。
在光谱维度上,激光与海水分子相互作用后的拉曼散射和布里渊散射与海水温度和盐度信息相关,可通过测量这两种散射光谱来实现对海水温盐等环境的遥感。由于拉曼散射频移较大,光谱较宽,光谱检测相对容易,因此基于拉曼散射的海水温度和盐度测量最先得到了应用[7-8]。相对于拉曼散射,布里渊散射截面更大,意味着更强的回波能量和更深的探测距离;同时布里渊散射光谱频移小,在光谱频域上的分布也要比拉曼光谱更窄(布里渊频移只有7~8 GHz左右;光谱的半高线宽也仅有0.5~1.5 GHz)[9],所以有效谱段内对应的背景噪声更少,具有更高的信噪比。因此布里渊散射激光遥感具有探测距离深和测量精度高的优点,是海水环境遥感的重要发展方向。
-
当激光入射到海水中时,激光会与海水介质发生相互作用产生弹性散射和非弹性散射。弹性散射主要是指相对于入射激光没有频率移动的散射,包括激光与悬浮粒子相互作用的米散射以及激光与海水分子相互作用产生的瑞利散射。非弹性散射主要包括激光与声学声子相互作用的布里渊散射,以及与光学声子相互作用的拉曼散射。布里渊散射和拉曼散射相对于激光中心频率有明显的频率移动,因此被称为非弹性散射。如图1所示,各种散射在光谱频率上是可以进行区分的,因此采用光谱检测的激光遥感方式具有噪声影响小,信噪比高和测量精度高的优点。由于声学声子主要和海水的声波场和声速相关,而海水声速又和温度、盐度等环境参量具有耦合关系,因此通过测量布里渊散射光谱即可实现对海洋环境参数的遥感。

图 1 激光与海水相互作用散射光谱示意图
Figure 1. Scattering spectrum of interaction between laser and sea water
由布里渊激光雷达的探测原理可知,与传统激光雷达进行能量接收不同,布里渊激光雷达需要进行散射光谱的精确测量,因此其对应的激光雷达系统对激光发射和光谱接收两部分都提出了更高要求。其中激光发射系统需要单稳频特性良好的激光器以保证发射激光光谱的稳定性和精确性,而在接收端则增加了光谱接收系统实现回波信号从能量到光谱的转换。
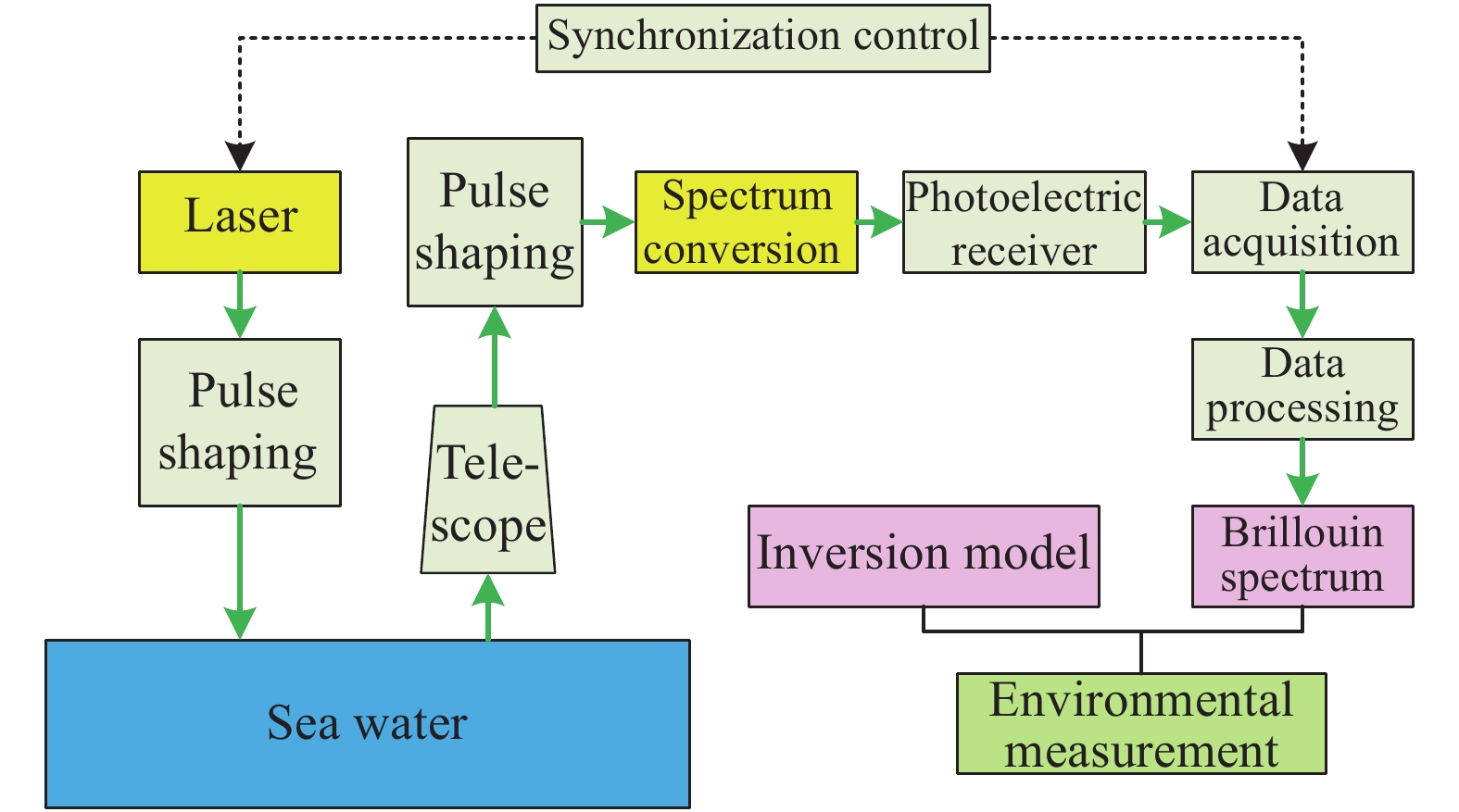
一个典型的布里渊激光雷达系统如图2所示,激光器发射激光经整形系统后入射到海水中产生布里渊散射信号,该信号经接收望远镜和光束整形系统后输入到光谱转换系统中将能量信号转换为布里渊光谱信号。随后该散射光谱经光电接收系统后转换为电信号,再经过数据采集和数据处理使得最后能够获取该布里渊散射光谱,其中激光发射和数据采集通过控制系统进行时序同步控制以便确认测量光谱对应的海水深度。最后结合散射光谱与环境参数的耦合关系对应的反演模型实现海洋环境参数的测量。

图 2 布里渊激光雷达系统图
Figure 2. Diagram of Brillouin lidar system diagram
-
依据布里渊散射光谱特征与海洋环境参数之间的耦合关系建立反演模型是布里渊激光雷达系统的测量理论基础。
由布里渊散射机理可知,布里渊散射是一种光子与介质相互作用的非弹性散射。与光子发生相互作用的并非介质粒子,而是介质密度波动。这种密度波动是由于介质粒子自由程的变动引起的,与介质的物理属性,如温度等都有关系。在宏观层面上,它是一种弹性振动,会形成声波场,并会造成介质的折射率在时空上发生周期性的变化。当光进入这个声波场时会因为这种折射率上的变化而产生散射现象。这种密度波动在微观上也能够被表示为声模,即声学声子,因而布里渊散射可以被认为是一种声光相互作用的散射。当布里渊散射发生时,光子通过碰撞会吞并一个声子增加自身能量,或者损耗自身能量进而产生一个声子。这种碰撞产生的声光能量交换会引起散射光频率的改变。在光谱上,这种光频率的变化体现为布里渊散射峰分为斯托克斯峰和反斯托克斯峰,其位置对称地分布在激光中心频率的两侧,相对于激光中心频率发生了一定的偏移。该偏移量被命名为布里渊频移,其物理表达式为[9]:
$${v_B}= - \frac{{{\omega _q}}}{{2\pi }}= \mp \frac{{2n{V_S}}}{{{\lambda _i}}}\sin \frac{\theta }{2}$$ (1) 式中:ωq为声子角频率;n为折射率;Vs为
声速;λi为入射光波长;θ为散射角,而布里渊峰半高处的宽度被定义为布里渊峰的半高线宽,简称布里渊线宽,其物理表达式为[10]: $${\varGamma _B}=\frac{{\varGamma {q^2}}}{\pi }=\frac{1}{{2\pi \rho }} \cdot \left[ {\frac{4}{3}{\eta _s}{\rm{ + }}{\eta _b} + \frac{\kappa }{{{C_V}}}\left( {\gamma - 1} \right)} \right] \cdot {\left( {\frac{{4\pi n}}{{{\lambda _i}}}\sin \frac{\theta }{2}} \right)^2}$$ (2) 式中:Γ为声波阻尼;q为声波波矢;ρ为气体密度;ηs和ηb分别为剪切粘滞系数和体粘滞系数;κ为气体热导率;cV为气体定容比热容。γ=cP/cV为气体的比热容比。由以上可以看出布里渊频移和线宽与入射激光的频率、介质的声速、折射率等参量相关。因此通过测量布里渊频移和线宽即可实现对介质参数的反演。
-
对于海水介质来说,折射率和声速都可以表示为关于海水温度、盐度和入射波长的函数,具体可将公式(1)改写为:
$${v_B} = \frac{{2n(T,S,\lambda ){V_s}(T,S,p)}}{{{\lambda _i}}}\sin \frac{\theta }{2}$$ (3) 从公式(3)可以看出,温度和盐度通过影响折射率n和声速Vs来反映到布里渊频移vB变化上;只需要知道与折射率n以及声速Vs与温度T和盐度S之间的关系,就可以得到布里渊频移和温度的联系。
根据海水折射率和声速关于温度、盐度的经验公式可将上式变换为温度关于盐度和布里渊频移的函数,如下所示[9]:
$$ \begin{split} T(S, {v_B})=&{t_0} + {t_1}({v_B} - 7.5) + {t_2}{({v_B} - 7.5)^2} + {t_3}{({v_B} - 7.5)^3} +\\ &{t_4}{({v_B} - 7.5)^6} + S\left[ {{t_5} + {t_6}({v_B} - 7.5) }+\right.\\ &\left. { {t_7}{{({v_B} - 7.5)}^2} + {t_8}{{({v_B} - 7.5)}^3}} \right] \end{split} $$ (4) 式中:T为温度,℃;vB为布里渊频移
,GHz;S为盐度,‰。参数t0-t8的取值可见参考文献[9]。同样的声速作为温度跟盐度的函数,也可以根据公式(3)及(4)得到: $$ \begin{split} {V_S}(S, {v_B})=&c_0^{'} + c_1^{'}({v_B} - 7.5) + c_2^{'}{({v_B} - 7.5)^2} + c_3^{'}{({v_B} - 7.5)^3} + \\ & c_4^{'}{({v_B} - 7.5)^5} + S\left[ {c_5^{'} + c_6^{'}{{({v_B} - 7.5)}^2} +} \right.\\ & \left.{c_7^{'}{{({v_B} - 7.5)}^3}} \right] \end{split} $$ (5) 这里参数c0~c7的取值可见参考文献[9]。
通过以上可知,在假设盐度已知的情况下即可实现对海水温度和声速的反演。其中温度最大拟合误差约为±0.16 ℃,声速拟合误差在±0.05 m/s。当布里渊频移的测量不确定度δvB=±1 MHz时,典型条件下温度测量不确定度为0.19~0.28 ℃,声速反演不确定度为0.234~0.255 m/s。
在2002年,北京师范大学的刘大禾课题组利用F-P扫描干涉仪结合PMT的方式接收后向布里渊散射谱线[11],并从中读取布里渊频移,进而利用公式(5)计算声速,获取了温度为0~30 ℃,盐度为0‰及35‰的多组不同条件下的声速数据,将得到的结果与经典方法测得的声速数据进行比较,其最大误差为13 m/s,最小误差为0.1 m/s,相对偏差小于0.9%,证明了利用布里渊频移反演海水中声速的可行性。
-
与布里渊频移类似,布里渊线宽公式中的海水的折射率n、密度ρ、体粘滞系数ηb、剪切粘滞系数ηs等也与海水温度T、盐度S有直接联系,因此,可将公式(2)改写为如公式(6)所示:
$$\begin{split} {\varGamma _B}=&\frac{1}{{2\pi \rho (T,S)}} \cdot \left[ {\frac{4}{3}{\eta _s}(T,S) + {\eta _b}(T,S) + \frac{\kappa }{{{C_p}}}\left( {\gamma - 1} \right)} \right] \cdot \\ &{\left( {\frac{{4\pi n(T,S)}}{{{\lambda _i}}}\sin \frac{\theta }{2}} \right)^2} \end{split}$$ (6) 可得布里渊线宽ΓB与温度T及盐度S之间的联系,进而利用经验拟合可以得到温度的计算公式[12]:
$$T(S, {\varGamma _B})=\sum\limits_{i=0}^5 {{t_i}\varGamma _B^{ - i}} + S({t_6}\varGamma _B^{ - 1} + {t_7}\varGamma _B^{ - 2} + {t_8}\varGamma _B^{ - 3})$$ (7) 其中参数t1~t8可见参考文献[12],同理,当盐度已知时,可以通过布里渊线宽进行海水温度反演。当布里渊线宽测量不确定度ΔΓB=1 MHz时,温度反演不确定度从0.008~0.08 ℃,小于通过布里渊频移反演温度的结果。
具体分析布里渊散射光谱与海水温度盐度的依赖关系可知[13],在较低温度(10 ℃)的条件下,采用线宽反演温度的理论模型会有较好的精度,而对于较高温度 (30 ℃)的条件,采用布里渊频移反演温度的理论模型会有较高的精度,则更适合采用频移测量的方式。
-
利用上述模型进行温度或者声速反演时,需要假定盐度已知。事实上,上述模型中布里渊频移vB和布里渊线宽ГB都是海水温度T和盐度S的函数,因而可以利用以上两式建立联立的方程组,将该方程组中的布里渊频移vB和布里渊线宽ГB认定为已知量,把海水的温度T和盐度S认作未知量,通过求解方程组:
$$\left\{ \begin{array}{l} {v_B}={v_B}(T,S) \\ {\varGamma _B}={\varGamma _B}(T,S) \end{array} \right. \Rightarrow \left\{ \begin{array}{l} T=T({v_B},{\varGamma _B}) \\ S=S({v_B},{\varGamma _B}) \end{array} \right.$$ (8) 能够得到温度T和盐度S关于布里渊频移vB和布里渊线宽ГB的表达式,即基于布里渊频移和布里渊线宽的温盐同步反演模型[14]。具体如下:
$$ \begin{split} T({v_B},{\varGamma _B})=&{t_1} + {t_2} \cdot {v_B} + \dfrac{{{t_3}}}{{{\varGamma _B}}} + {t_4} \cdot {v_B}^2 + \dfrac{{{t_5}}}{{\varGamma _B^2}} + \dfrac{{{t_6} \cdot {v_B}}}{{{\varGamma _B}}} + \\ & {t_7} \cdot v_B^3 + \dfrac{{{t_8}}}{{\varGamma _B^3}} + \dfrac{{{t_9} \cdot {v_B}}}{{\varGamma _B^2}} + \dfrac{{{t_{10}} \cdot v_B^2}}{{{\varGamma _B}}} \end{split} $$ (9) $$ \begin{split} S({v_B},{\varGamma _B})=&{s_1} + \dfrac{{{s_2}}}{{{v_B}}} + \dfrac{{{s_3}}}{{v_B^2}} + \dfrac{{{s_4}}}{{v_B^3}} + \dfrac{{{s_5}}}{{v_B^4}} + \dfrac{{{s_6}}}{{v_B^5}} + {s_7} \cdot \ln {\varGamma _B} + \\ & {s_8} \cdot {\ln ^2}{\varGamma _B} + {s_9} \cdot {\ln ^3}{\varGamma _B} + {s_{10}} \cdot {\ln ^4}{\varGamma _B} + {s_{11}} \cdot {\ln ^5}{\varGamma _B} \end{split} $$ (10) 式中:布里渊频移vB和布里渊线宽ГB的单位为GHz,参数t1~t10和s1~s11为常数,具体取值可见参考文献[14]。
该模型的温度的拟合误差在0.08 ℃以内,相对误差少于0.26%,而盐度拟合误差在0.21‰以内,相对误差少于0.57%。相比于以往温度单参数反演模型,温度拟合误差相近,而盐度也在海洋盐度变化范围(1‰以上的变化)内,能够用于分辨海洋盐度的变化。设置δvB=±1 MHz和δГB=±1 MHz,温度和盐度的测量不确定度的平均值分别为0.06 ℃和0.84‰。与单参数反演模型相比,温度拟合误差与分辨率相当,而盐度拟合误差则要明显小于该不确定度,说明该模型的拟合精度已满足目前MHz的测量精度。
在2014年,华中科技大学基于F-P标准具结合ICCD的接收系统,获取布里渊散射谱线[15],得到布里渊频移以及布里渊线宽进行温度、盐度的双参数反演,实验结果表明,温度拟合误差在0.1 ℃以内,盐度拟合误差为0.36‰,充分证明了利用布里渊频移及布里渊线宽进行双参数反演的可行性。
-
布里渊散射光谱的测量技术是实现海洋环境参数反演的关键技术。为了保证布里渊散射光谱测量的稳定性,对于激光器来说,一方面需要具备良好的频率稳定特性,确保布里渊散射光谱的整体抖动在一个可以接受的误差范围内;另一方面应尽量满足稳定的窄线宽需求,使得激光线宽不会让布里渊散射光谱的测量引入过多的误差。在保证激光发射端正常工作的基础上,需重点研究和突破接收端的光谱测量技术。
目前,可用于布里渊光谱测量的术有法布里珀罗(Fabry-Pérot,F-P)扫描干涉仪技术[16-17]、边缘探测技术[18-22]、F-P标准具结合增强型电耦合器(Intensified Charge Coupled Device,ICCD)技术[23-24]和多边缘探测技术[25]等。
-
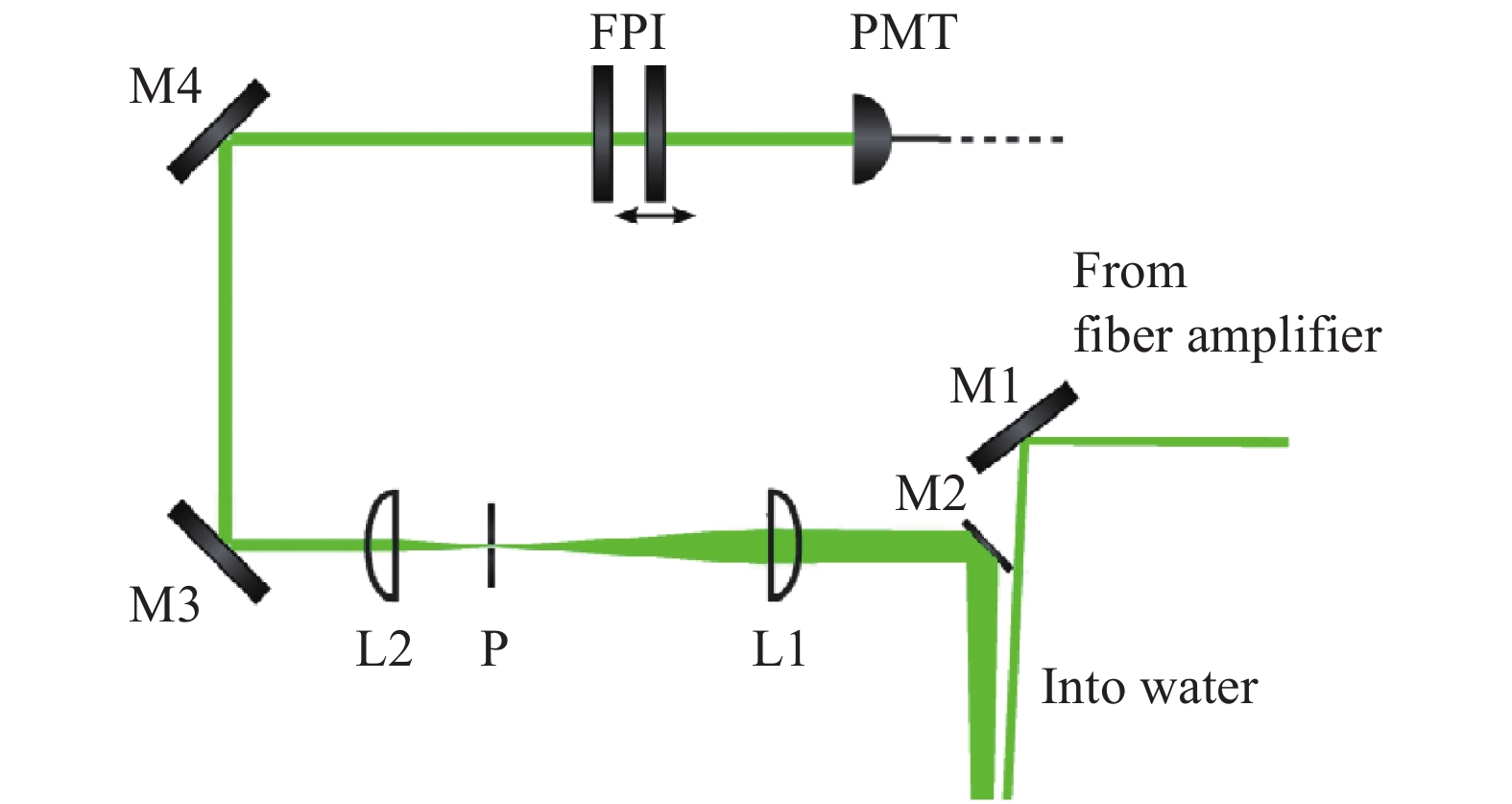
F-P扫描干涉仪是通过控制F-P干涉仪的腔长来改变腔体的接收频点,从而扫描回波信号谱。E.S Fry和刘大禾等研究小组最初采用这种扫描方法获取散射回波信号的整张频谱[16-17],这是一种频域检测方式,有较高的抗噪能力,但是其扫描耗时较长,频谱分辨率通常为10 MHz量级,其系统如图3所示[26]。

图 3 用扫描F-P干涉仪测量水中布里渊散射实验装置图
Figure 3. Experimental setup for measuring Brillouin scattering in water with scanning F-P interferometer
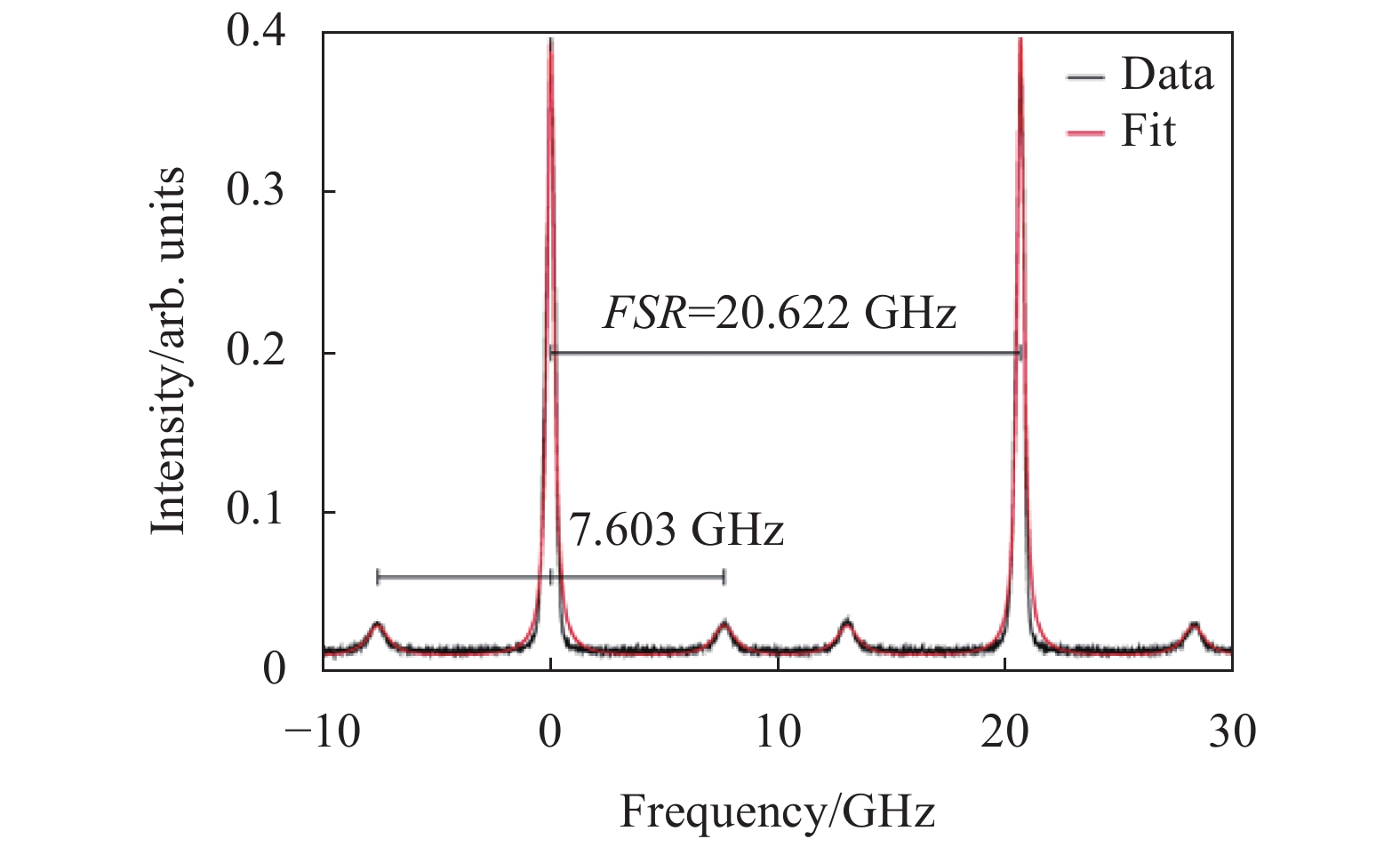
实验中设定扫描干涉仪的自由光谱范围为20.622 GHz, 扫描周期为50 s,测量得到的布里渊散射频谱如图4所示[26]。

图 4 水中测量得到的布里渊散射谱线
Figure 4. Brillouin scattering spectrum measured in water
图4显示的完整散射光谱中既有瑞利散射峰(中心谱线),又有布里渊散射峰,布里渊散射峰对称地分布在瑞利散射峰两侧,发生的是自发布里渊散射。之后利用曲线最小二乘拟合的方法可以获取得到布里渊线宽以及布里渊频移数据,进而进行海水参数反演。
扫描干涉技术可以精确获取散射光谱,但是需要入射到干涉仪的光是严格准直的,这在实际环境中比较困难;此外扫描需要一定时间,获得一次布里渊散射光谱扫描耗时较长,无法做到对散射光谱的实时快速测量,限制了实际应用。
-
为了实时获取布里渊散射光谱,后来采用边缘探测技术进行布里渊散射光谱的测量。边缘探测技术的基本原理如图5所示[20],是使散射光谱位于一个高分辨率光学滤波器光谱响应函数的边缘。由于滤波器的光谱线型轮廓具有很陡的斜率,因此散射光谱对应的频移微小变化将导致通过光学滤波器后光强的很大变化,通过频移和能量的对应关系即可实现频移的精确测量。

图 5 利用边缘技术测量水中布里渊散射的原理图
Figure 5. Principle of Brillouin scattering measurement in water using edge technology
-
1975年,美国迈阿密大学的J. G. Hirschberg等人最早搭建了基于布里渊散射的激光雷达系统[18]。激光发射系统由488 nm的氩离子连续激光器组成,用于产生海水的布里渊散射。散射回波光由两个固定间隔的F-P干涉仪以及一个迈克尔逊干涉仪组成的接收系统接收。两个F-P干涉仪是针对两个布里渊峰的边缘滤波器,能够有效地选择出两个布里渊散射峰的频段并抑制中心的瑞利散射波段。通过监测布里渊峰能量的变化,该套系统能够得到布里渊频移值,并进行海水声速和温度的反演。
-
20世纪90年代,美国德州农机大学的E. S. Fry等人提出在接收采集部分,采用碘/溴分子(I2/Br2)吸收池代替了两个固定F-P腔[19]。对于海水来说,I2/Br2分子在波长为532 nm上具有一个对称的低衰减窗。当采用532 nm的激光进行水下散射时,I2/Br2分子低吸收窗的边缘与两个对称的布里渊散射峰重合,如图6所示[20]。返回的散射信号首先通过一个含有Br2的单元(阻滞剂),该气体吸收中心频率分量,并传输布里渊分量中的大部分光。随后通过1∶1分束,将传输信号的一半作为参考能量信号S1;其余一半通过包含I2的第二单元(边缘滤波器),形成信号S2。通过S2与S1的比值得到归一化的强度S(vB),由此可以确定布里渊频移。

图 6 (a)溴分子吸收谱线;(b)碘分子吸收谱线
Figure 6. (a) Absorption lines of bromine; (b) Absorption lines of iodine
图7显示了实验结果[20],给出不同温度下归一化的强度测量数据(黑色的点)。每个点都是200次测量的平均值,图7(b)给出了校准后的归一化信号与布里渊频移的结果,可通过测量归一化强度来测定水中的布里渊频移。当布里渊峰位置发生变化时,该套系统通过迅速监测能量的变化精确地预测出布里渊频移量的大小,其测量精度达到20 MHz,因而该方法在布里渊频移的获取上具有非常高的精度和测量速度。
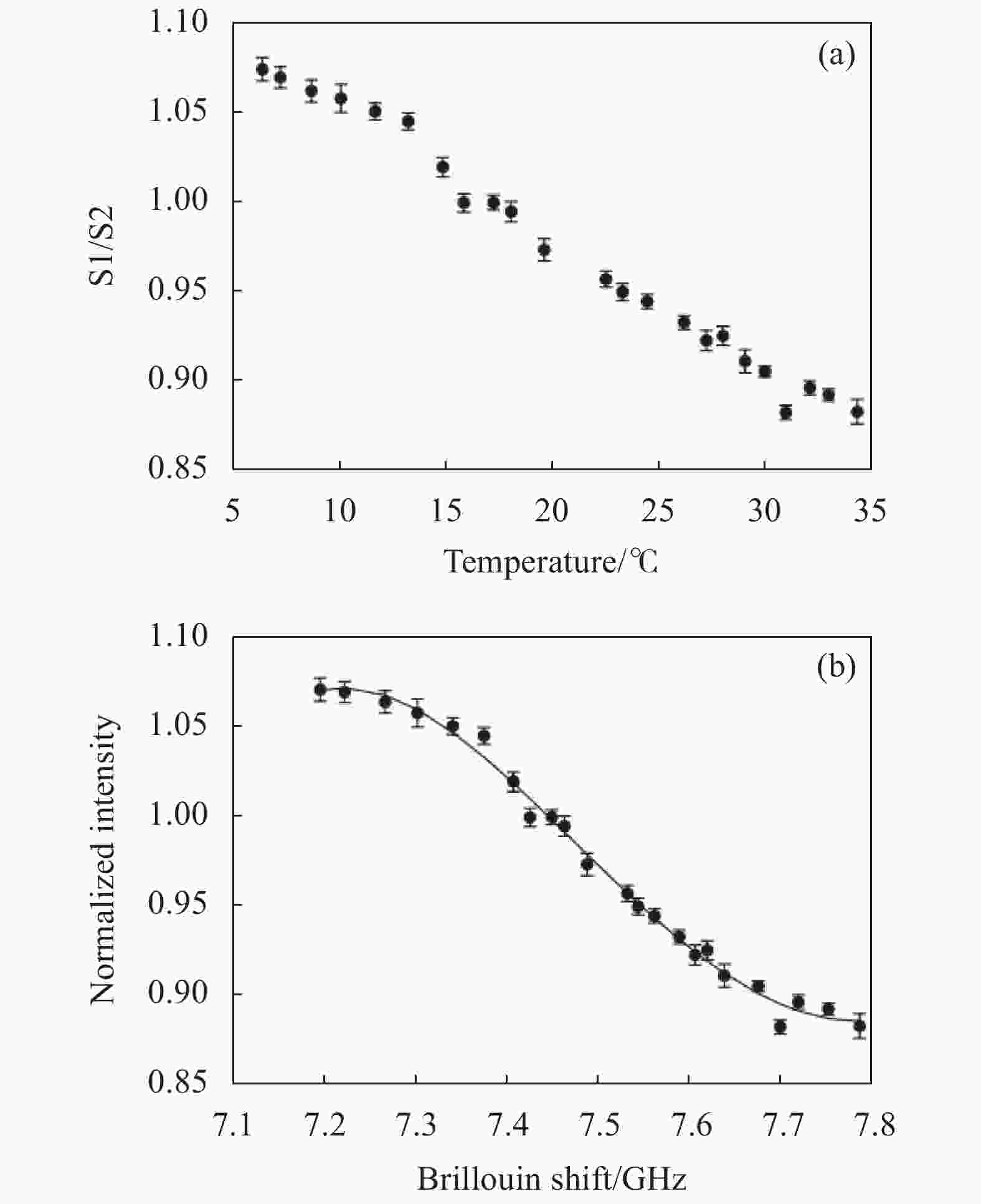
图 7 (a)归一化强度信号与温度依赖性;(b)校准后,归一化强度信号与布里渊频移的依赖性
Figure 7. (a) Dependence of normalized intensity signal on temperature; (b) Dependence of normalized intensity signal on Brillouin shift after calibration
-
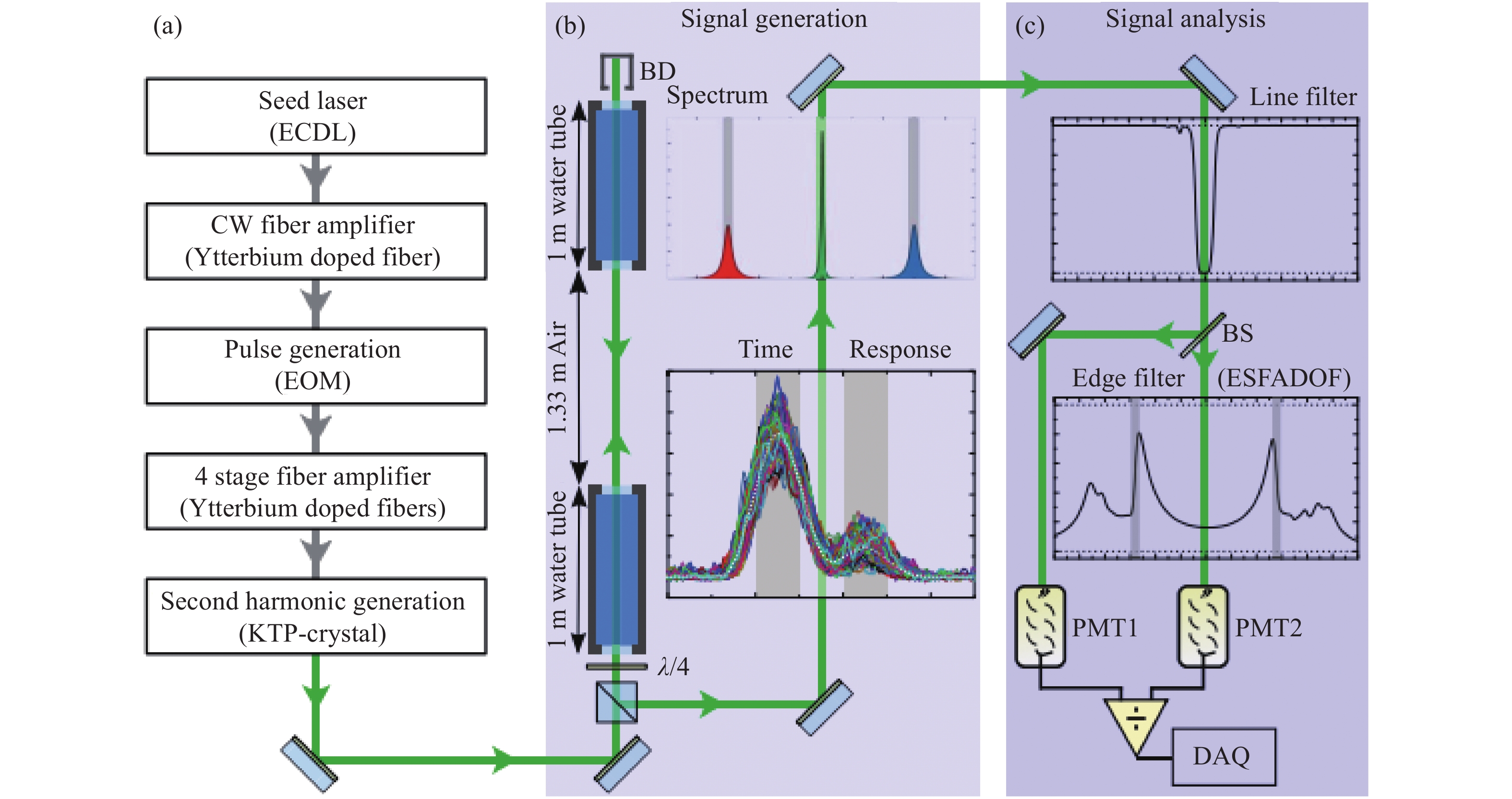
德国达姆施塔特工业大学的T. Walther在Fry系统的基础上,进一步改进了边缘探测型激光雷达的接收系统,设计了一套激发态法拉第反常色散光学滤波器(Excited State Faraday Anomalous Dispersion Optical Filter, ESFADOF),取代原有的I2/Br2吸收池滤波器[21-22]。在实验室环境下,散射光被引导到一个激发态法拉第反常色散光学滤波器(ESFADOF),作为边缘滤波器,如图8所示[22]。当温度变化时,布里渊谱线发生偏移,导致通过滤波器的传输能量发生变化。

图 8 利用ESFADOF作为边缘探测技术的激光雷达系统实验装置图。(a)激光光源光源产生方案;(b)激光散射方案以及对应产生的布里渊散射谱线;(c)边缘探测方案以及对应的边缘滤波曲线
Figure 8. Experimental setup of lidar system using ESFADOF as edge detection technology. (a) Laser source generation scheme; (b) Laser scattering scheme and corresponding Brillouin scattering spectrum line; (c) Edge detection scheme and corresponding edge filtering curve
ESFADOF是一种新型的边缘滤波技术,能够将布里渊频移的变化转换为传输能量变化,通过对传输信号进行归一化和校准,可以找到传输与频移的一一对应关系。该装置的特点在于能够控制磁场强度来寻找合适的边缘滤波吸收函数,因而相比于传统的I2/Br2吸收池边缘滤波技术来说,其布里渊频移的测量范围更加宽泛。同时,该接收设备拥有更宽的视场角、更强的背景噪声抑制能力以及更短的响应时间,使得采用边缘探测技术的布里渊激光雷达拥有了更符合实际的应用能力。
T. Walther的改进使得激光雷达的性能有了很大的提高,通过PMT电压信号的多次平均,获取布里渊频移的变化进行温度反演,其温度反演误差在1 K以内,如图9所示[22]。但是ESFADDF技术需要复杂的磁场控制装置,整体设备比较昂贵和复杂,适合于实验室验证,不太适用于外场实际测量的应用。
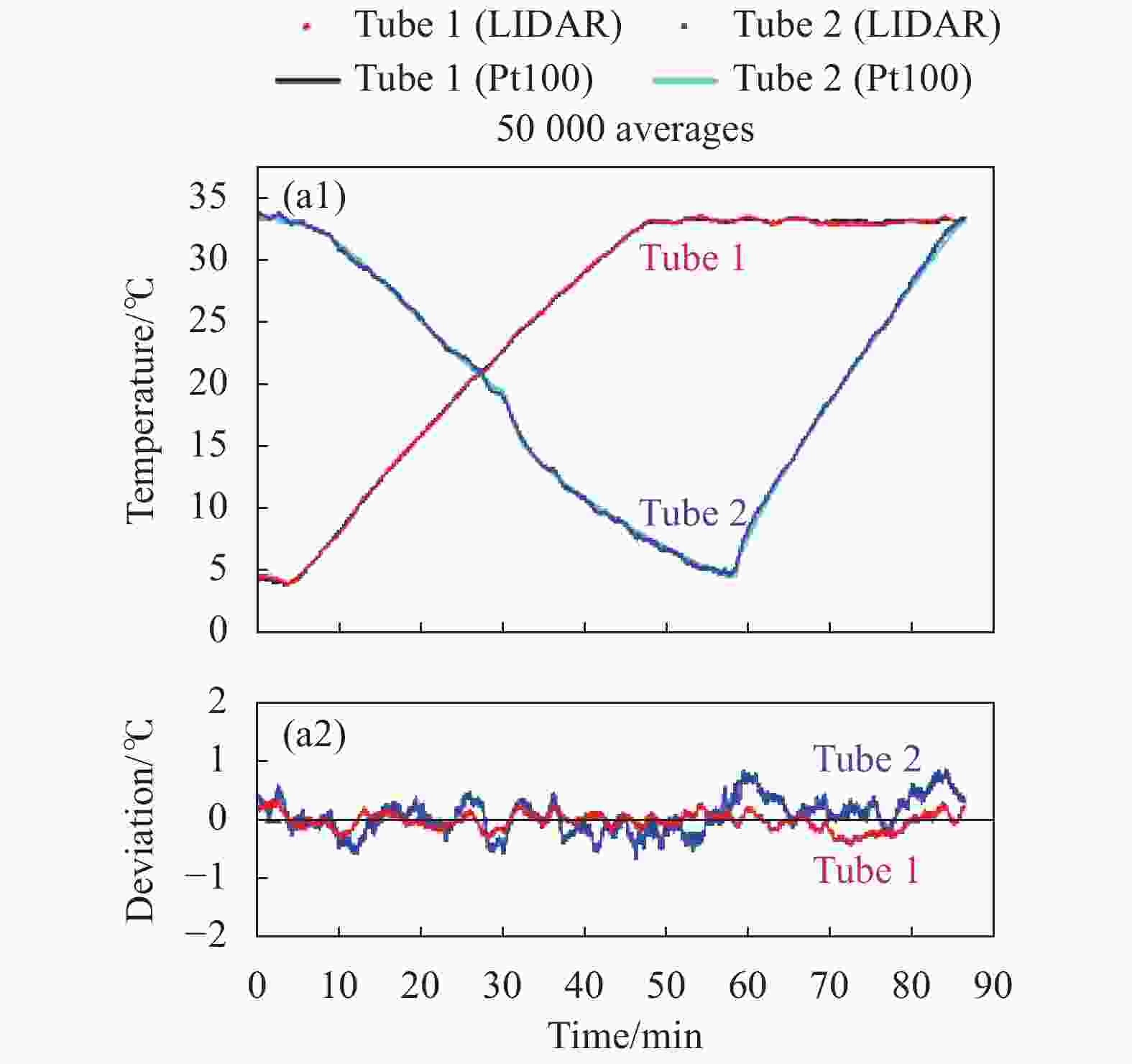
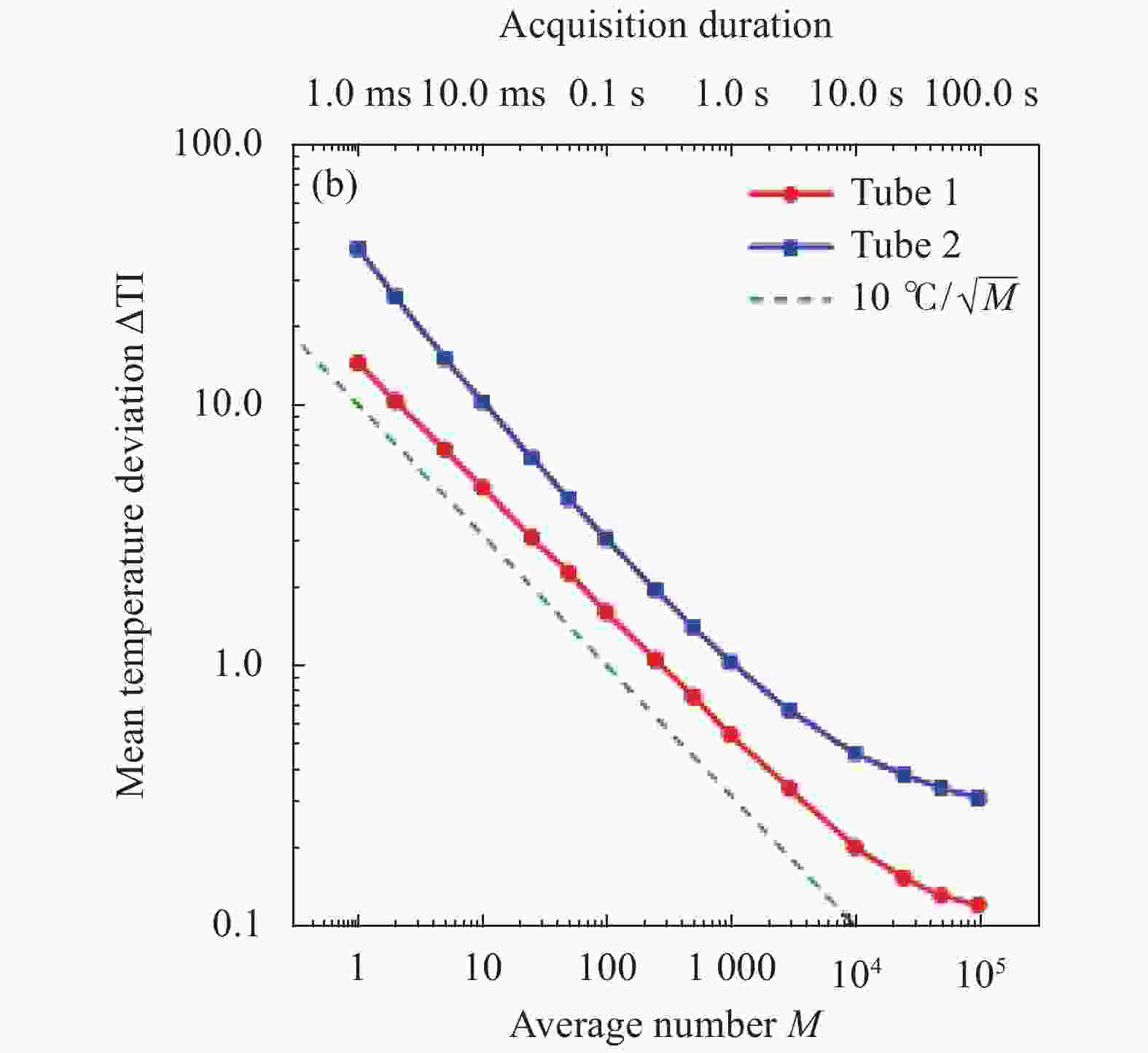
图 9 (a1) 50 000次测量平均后,激光雷达两个管道测量的温度结果同Pt100测量结果的比较,(a2)误差分析;(b)激光雷达两个管道的平均温度偏差与平均次数和采集持续时间之间的关系
Figure 9. (a1) Comparison of the temperature results measured by two lidar tubes and Pt100 after 50 000 measurements, (a2) Error analysis; (b) Relationship between the average temperature deviation, average number and acquisition duration of two lidar tubes
现有边缘探测技术能够通过能量变化测量布里渊频移这一个参数,但是从原理上来看只是利用了光强变化与布里渊频移之间的耦合关系,因此只能实现对布里渊频移的测量,而不能实现整个散射光谱的完整测量。
-
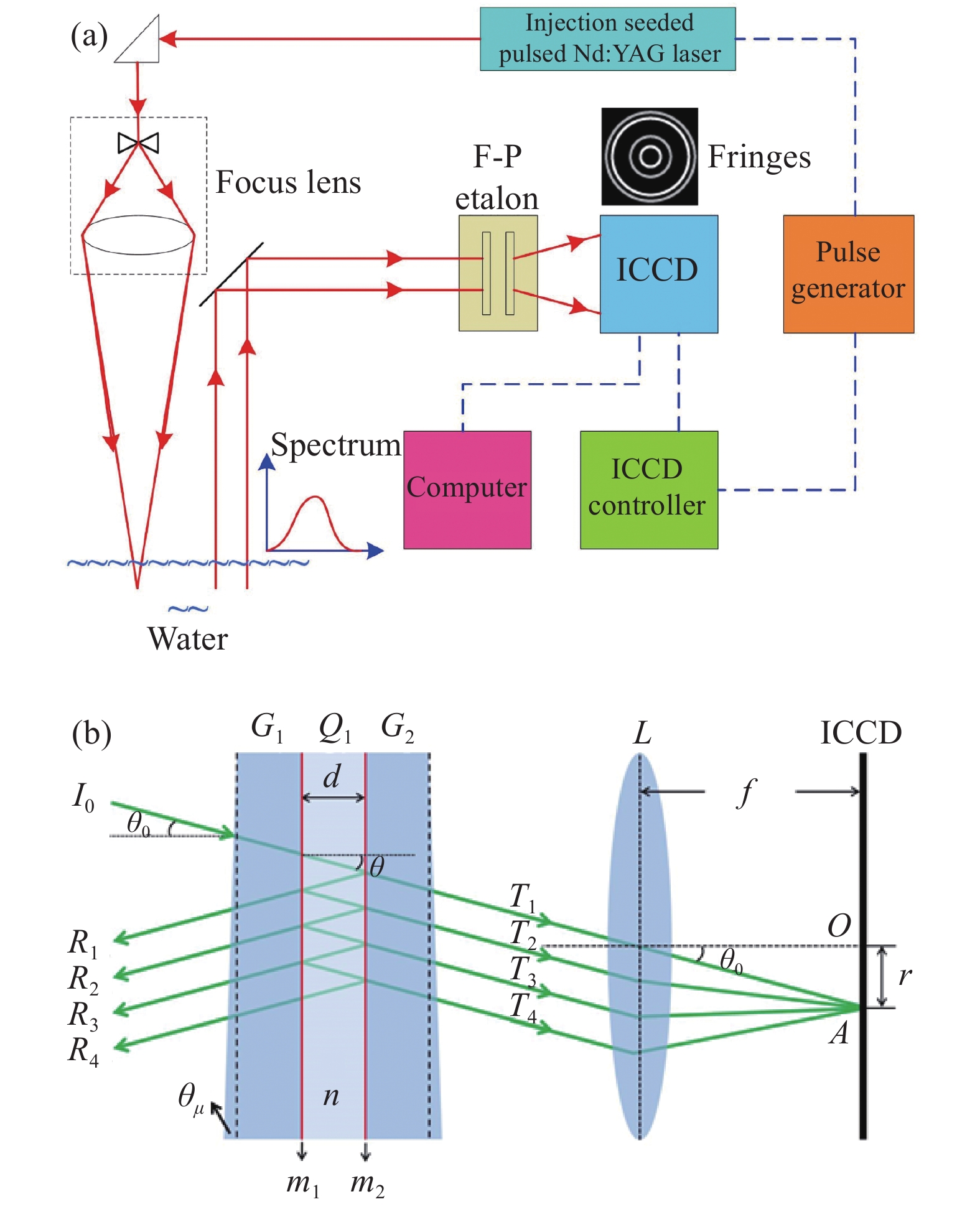
后来为了实时获取整体布里渊散射光谱,北京师范大学的刘大禾教授课题组联合南昌航空大学对海洋布里渊激光雷达的接收系统又做了进一步的改进,将激光雷达的接收端改进为F-P标准具结合ICCD的方式[23],使得系统能够实时获取布里渊散射信号,整体系统如图10(a)所示。采用固定腔长的F-P标准具接收散射回波信号,以不同倾角的干涉区分不同频率的散射光并呈现在空间的不同位置上,并引入ICCD成像技术将不同频率光的位置以干涉图样的方式显示出来,进而获取了散射光的光谱,如图10(b)所示。与传统扫描F-P干涉仪相比,该成像方法的优势在于采用以空间上的图像位置区分频率的方式代替了传统以时间区分频率的方式,将原本需要大量时间扫描才能获取的谱线一次性地呈现为散射谱图样,因而能够实时采集布里渊散射谱。

图 10 (a)采用F-P标准具结合ICCD的水下布里渊激光雷达系统示意图;(b) F-P标准具结合ICCD进行光谱检测原理图
Figure 10. (a) Sketch of underwater Brillouin lidar system using F-P etalon combined with ICCD; (b) Principle of spectrum detection using F-P etalon combined with ICCD
这套采用F-P标准具结合ICCD的布里渊激光雷达系统以图像分布获取了实时采集散射谱的能力,并能够利用采集到的散射谱信息进行海洋温度、盐度反演。但同样引入了新问题,其接收系统获取的并非是能够直接用于测量的布里渊散射谱线,而是含有散射谱信息的二维散射圆环图,需要预先从该图样中提取出布里渊散射谱或采用一定的方法从中读取频谱信息,才能进行后续测量。而且受限于ICCD分辨率限制,采集到的二维干涉光谱分辨率不能够直接满足高精度温盐反演的需求,需要进一步通过图像融合以及自适应滤波等算法,突破ICCD像素分辨率的限制。
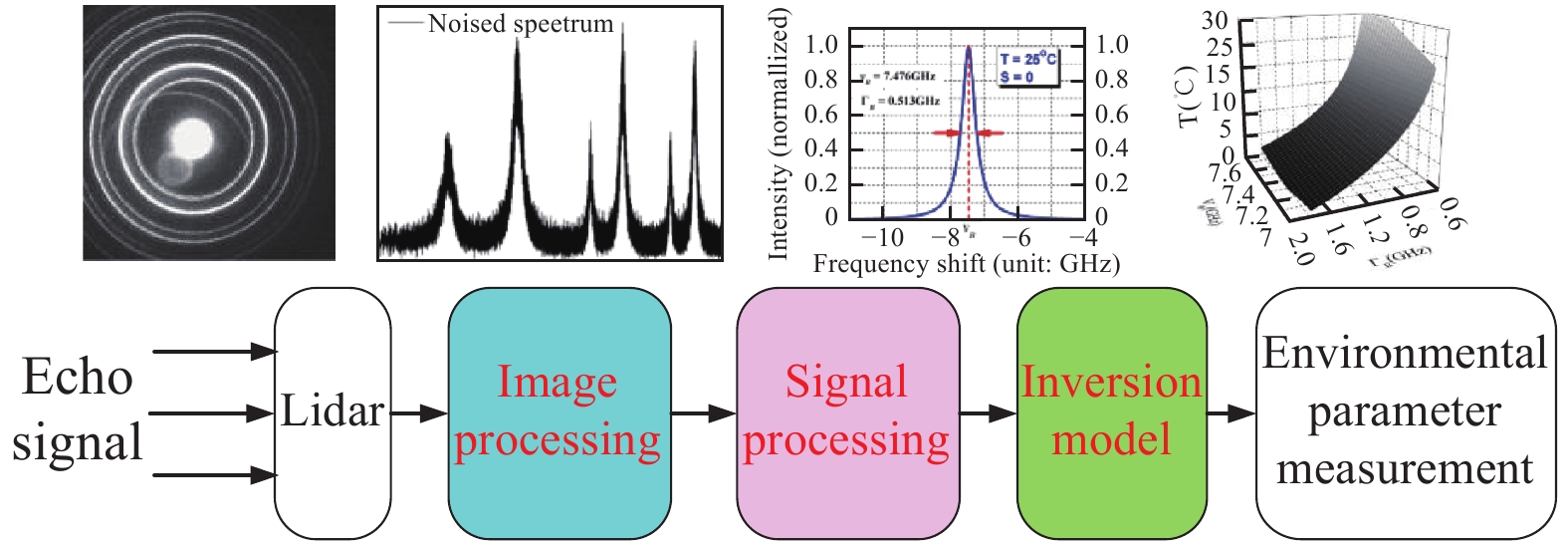
华中科技大学Huang J课题组通过一系列的图像处理技术和信号处理技术对该方法获取的二维干涉图进行处理,以获得高精度的布里渊散射光谱[24],如图11所示。实验结果表明,该方法测量精度高,布里渊频移和线宽的精度可以达到数MHz,海洋温度的测量精度小于0.1 ℃。这种方法提高了温度测量能力,对布里渊激光雷达系统在海洋遥感测温中的应用具有很大的提升作用。然而受限于ICCD现有积分时间和帧率限制,这种体制下的布里渊散射光谱采集速度不高,因此不能连续获取高密度的温盐垂直廓线。
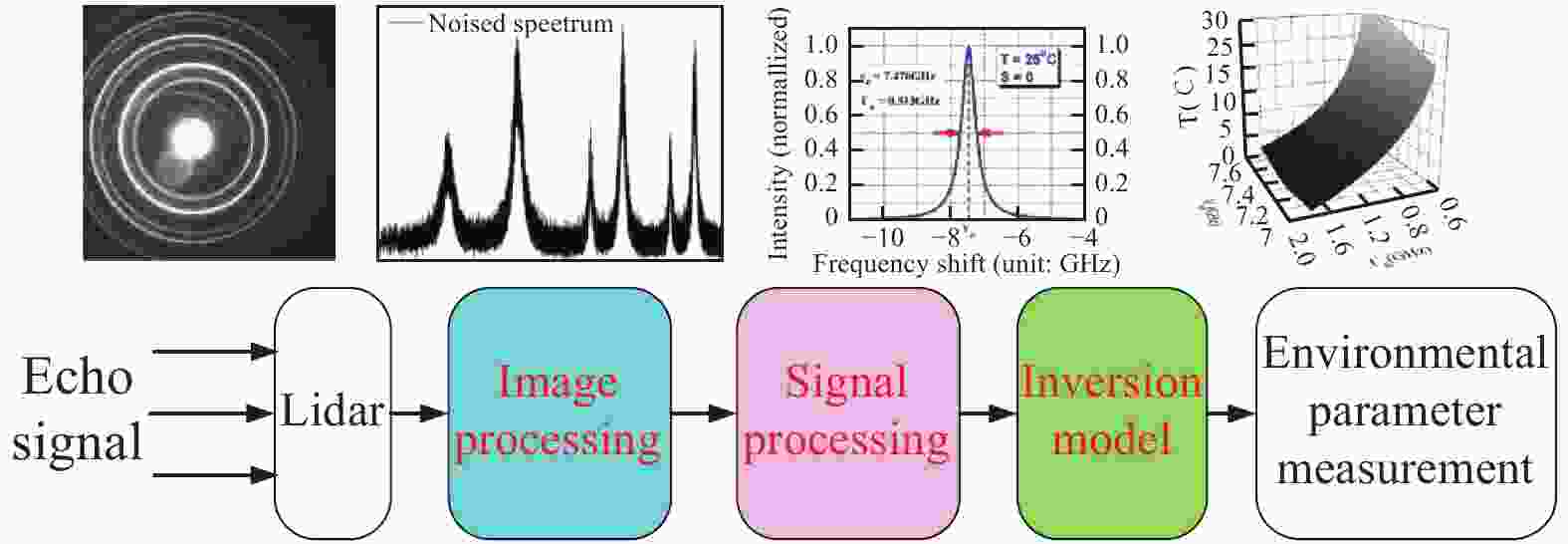
图 11 水下布里渊散射探测系统流程图
Figure 11. Flow chart of underwater Brillouin scattering detection system
-
目前布里渊激光光谱检测方法的共同特点是都能够实现高灵敏度和高精度的散射光谱测量,但是目前这几种主流布里渊散射光谱探测技术在面向实时性、光谱完整性以及测量连续性这几条需求中还不能做到兼顾。具体分析可知:(1)边缘探测技术和F-P标准具结合ICCD的技术能够对回波信号进行快速测量,可以做到真正意义上的实时监测,而F-P扫描干涉仪扫描周期长,不能做到实时监测;(2) F-P扫描干涉仪和F-P标准具结合ICCD这两种方法可以直接得到散射光谱,而现有边缘探测方法无法直接得到散射光谱,不能实现海洋温盐多参数的同步测量;(3) 通过在F-P标准具结合ICCD这套探测系统中加入聚焦装置,可以改变激光光束在被测区域的聚焦位置,从而实现不同深度的探测,提高探测深度和深度分辨率,但是受限于ICCD积分时间和帧率,不能实现垂直剖面分辨率为米级(对应时间分辨率为10 ns量级)的连续测量。
针对目前在面向海洋遥感实际应用需求的布里渊光谱检测技术三项瓶颈:实时性、光谱完整性以及测量连续性,华中科技大学Liang K提出了多通道边缘技术稀疏重构的布里渊散射光谱方法[25]。由布里渊散射特性的研究可知,海水布里渊散射发生在流体动力学区域,光谱分布呈洛伦兹线型,其主要由频移和线宽两个光谱参数确定。因此,理论上通过至少两个光学滤波器后的局部窄带特征能量变化与布里渊频移和线宽变化的耦合关系即可实现布里渊频移和线宽的测量(相当于至少通过两个自变量求解两个因变量),进而再重构出布里渊散射光谱。而且基于这种耦合关系和布里渊光谱本身的廓线特性的约束关系,在滤波器带宽较大的条件下理论上也可以实现高精度的测量和光谱的重建。
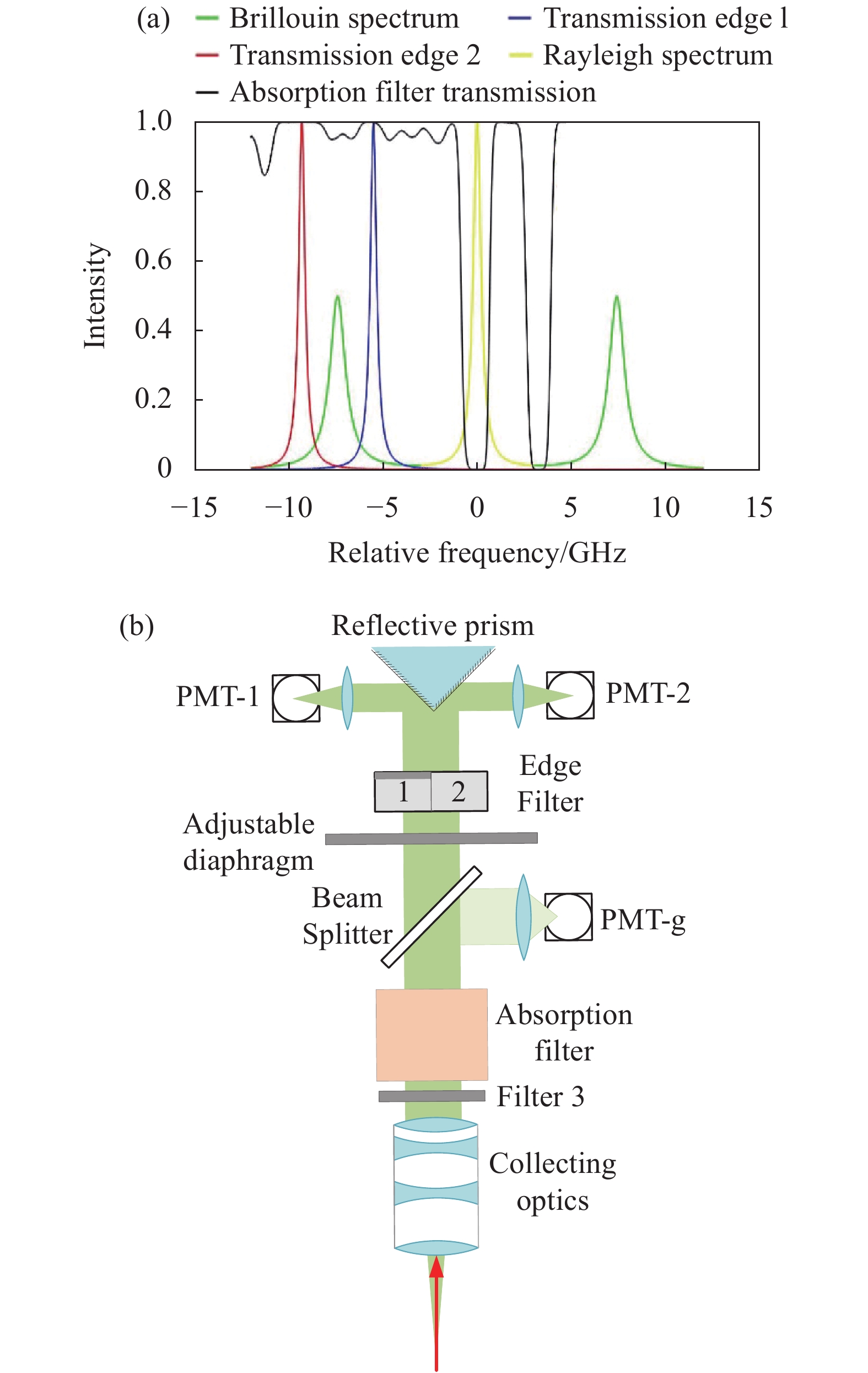
多通道边缘技术稀疏重构的布里渊散射光谱方法,既能够采用宽带宽的多通道边缘滤波器保证每个通道透过的光谱能量,提高探测距离;又能够通过稀疏重构技术实现高精度布里渊散射光谱的测量。其具体技术原理和系统设计如图12所示[25]。

图 12 布里渊散射光谱中使用的双边缘技术。(a) 双边缘滤波技术的原理; (b) 双边缘滤波方法的实验装置示意图
Figure 12. Double edge technique used in Brillouin scattering spectrum.(a) Principle of double edge filtering technique; (b) Sketch of experimental device of double edge filtering method
图12(a)显示了双边缘检测技术的原理。在单个布里渊散射峰(绿线)的光谱范围内设置两个边缘滤波器1(蓝线)和边缘滤波器2 (红线),其透射的光分别被PMT-1和PMT-2接收。因此,布里渊散射频移和线宽变化(相对应的温度和盐度变化)将导致通过两个边缘滤波器的信号强度变化。所以,可以利用这两个信号强度来计算布里渊散射频移和线宽。为了减少瑞利散射(黄线)的影响,还需要一个带阻滤波器,该吸收滤波器(黑线)是一个带阻滤波器,它会抑制无频率移动的瑞利散射光。
这里,利用经验拟合获取布里渊频移及布里渊线宽与边缘滤波器相对能量I1,I2的关系公式vB(I1, I2)和ГB(I1,I2),发现经验公式与理论值之间的误差如下:布里渊频移的误差为在±3 MHz内,布里渊散射线宽误差在±6 MHz内。
进一步分析该方法对于温度和盐度的不确定性,可知:1%的I1能量测量误差引起的温度和盐度的不确定度分别小于0.8 ℃和0.4‰。1%的I2能量波动引起的温度和盐度不确定度分别小于0.3 ℃和1.4‰[25]。
-
布里渊激光雷达作为一种基于光谱特征探测的遥感技术,在海洋遥感应用上有着巨大的潜力。文中主要介绍了基于布里渊散射的海洋环境激光遥感方法中的系统、反演理论和光谱测量方法。目前,海洋环境激光雷达整体系统构建已经趋向成熟完整,利用布里渊散射谱线信息参数构建反演模型的理论研究也逐步完善,能够实现温度与盐度的同步反演,其温度反演精度在0.08 ℃以内,盐度反演精度在0.21‰以内,满足实际海洋环境参数测量的需要,现阶段最大的问题在光谱测量方法上,从目前现有的布里渊散射光谱测量技术来看,边缘探测技术没有引入过多的光谱转换过程,信号处理也比较简单,在测量的实时性、光谱的连续性等方面具有优势。但是,边缘探测技术不能实现完整散射光谱测量,因此无法实现双参数同步测量;采用多边缘探测技术,能够通过稀疏重构的布里渊散射光谱方法,获取完整的散射光谱,并从中同步反演海洋温盐参数。但是这种稀疏重构的方法获取的谱线分辨率较差,导致温盐反演精确性不高,因此,可以将大气瑞利布里渊散射测量系统引入到海洋布里渊散射测量中来,利用Fizeau干涉仪结合PMT阵列的方式实现高分辨率的光谱测量,进而提升温盐同步反演精度。
随着光谱检测技术的逐步提升,与现有的激光雷达系统以及反演理论模型相结合,能够实现实时性好、连续性强、光谱完整性高、反演精度性高的基于布里渊散射的海洋环境激光遥感技术。这将大力促进布里渊激光雷达面向海洋遥感的真实应用,更好地服务于我国的海洋事业。
Research progress of ocean environmental laser remote sensing based on Brillouin scattering
-
摘要:
布里渊激光雷达是探测海洋环境参数的重要手段之一。首先介绍了布里渊激光雷达系统的基本工作原理,然后从理论基础出发,重点介绍了三种依据布里渊散射光谱特征:布里渊频移、布里渊线宽、以及综合二者与海洋环境参数之间的耦合关系建立的反演模型;其次,作为布里渊激光雷达的关键技术,介绍了多种布里渊散射光谱的测量方法:F-P扫描干涉仪探测、边缘探测、F-P标准具- ICCD探测, 以及多边缘探测。
Abstract:Brillouin lidar is one of the important methods to detect ocean environmental parameters. Firstly, the basic work principle of Brillouin lidar system was introduced. Then, from the theoretical basis, three retrieval models based on the relationship between Brillouin scattering spectrum characteristics: Brillouin shift, Brillouin linewidth, and the combination of them, and ocean environmental parameters were introduced. Secondly, as the key technology of Brillouin lidar, several Brillouin spectrum measurement methods were introduced: the scanning Fabry-Pérot(F-P) interferometer, the edge detection technique, F-P etalon combined with Intensified Charge Coupled Device(ICCD), and multi edge detection technique.
-
Key words:
- Brillouin scattering /
- ocean remote sensing /
- ocean environment /
- scattering spectrum
-
图 1 激光与海水相互作用散射光谱示意图
Figure 1. Scattering spectrum of interaction between laser and sea water
图 3 用扫描F-P干涉仪测量水中布里渊散射实验装置图
Figure 3. Experimental setup for measuring Brillouin scattering in water with scanning F-P interferometer
图 5 利用边缘技术测量水中布里渊散射的原理图
Figure 5. Principle of Brillouin scattering measurement in water using edge technology
图 6 (a)溴分子吸收谱线;(b)碘分子吸收谱线
Figure 6. (a) Absorption lines of bromine; (b) Absorption lines of iodine
图 7 (a)归一化强度信号与温度依赖性;(b)校准后,归一化强度信号与布里渊频移的依赖性
Figure 7. (a) Dependence of normalized intensity signal on temperature; (b) Dependence of normalized intensity signal on Brillouin shift after calibration
图 8 利用ESFADOF作为边缘探测技术的激光雷达系统实验装置图。(a)激光光源光源产生方案;(b)激光散射方案以及对应产生的布里渊散射谱线;(c)边缘探测方案以及对应的边缘滤波曲线
Figure 8. Experimental setup of lidar system using ESFADOF as edge detection technology. (a) Laser source generation scheme; (b) Laser scattering scheme and corresponding Brillouin scattering spectrum line; (c) Edge detection scheme and corresponding edge filtering curve
图 9 (a1) 50 000次测量平均后,激光雷达两个管道测量的温度结果同Pt100测量结果的比较,(a2)误差分析;(b)激光雷达两个管道的平均温度偏差与平均次数和采集持续时间之间的关系
Figure 9. (a1) Comparison of the temperature results measured by two lidar tubes and Pt100 after 50 000 measurements, (a2) Error analysis; (b) Relationship between the average temperature deviation, average number and acquisition duration of two lidar tubes
图 10 (a)采用F-P标准具结合ICCD的水下布里渊激光雷达系统示意图;(b) F-P标准具结合ICCD进行光谱检测原理图
Figure 10. (a) Sketch of underwater Brillouin lidar system using F-P etalon combined with ICCD; (b) Principle of spectrum detection using F-P etalon combined with ICCD
图 11 水下布里渊散射探测系统流程图
Figure 11. Flow chart of underwater Brillouin scattering detection system
-
[1] Hua Dengxin, Wang Jun. The research progress of ocean laser remote sensing technology(invited) [J]. Infrared and Laser Engineering, 2018, 47(9): 0903003. (in Chinese) doi: 10.3788/irla201847.0903003 [2] Lin Mingsen, He Xianqiang, Jia Yongjun, et al. Progress of ocean satellite remote sensing technology in China [J]. Acta Oceanographica Sinica, 2019, 41(10): 99-112. (in Chinese) [3] Yin Xiaobin, Wang Zhenzhan, Liu Yuguang, et al. Comparison of sea surface temperature retrieved by infrared and microwave radiometers [J]. Ocean Bulletin, 2009, 11(2): 1-12. (in Chinese) [4] Yu Xiaolei, Wu Zhaocong. Retrieval of Bohai sea surface temperature using thermal infrared image of HJ-1 satellite [J]. Ocean Technology, 2011(2): 5-10. (in Chinese) [5] 殷晓斌. 海面风矢量、温度和盐度的被动微波遥感及风对温盐遥感的影响研究[D]. 中国海洋大学, 2007. Yin Xiaobin. Passive microwave remote sensing of sea surface wind vector, temperature and salinity and the influence of wind on temperature and Salinity Remote Sensing[D]. Qingdao: Ocean University of China, 2007. (in Chinese) [6] Li Qingxia, Zhang Jing, Guo Wei, et al. Research progress of remote sensing ocean salinity by microwave radiometer [J]. Ocean Technology, 2007, 26(3): 62-67. (in Chinese) [7] Ren Xiuyun, Wang Ling, Tian Zhaoshuo, et al. Study on practical underwater temperature telemetry system based on Raman spectroscopy [J]. Spectroscopy and Spectral Analysis, 2019, 39(3): 120-125. (in Chinese) [8] 张雪娟. 基于拉曼散射的海水盐度测量技术研究[D]. 哈尔滨工业大学, 2017 Zhang Xuejuan. Research on seawater salinity measurement technology based on Raman scattering[D]. Harbin: Harbin Institute of Technology, 2017. (in Chinese) [9] Fry E S, Emery Y, Quan X, et al. Accuracy limitations on Brillouin lidar measurements of temperature and sound speed in the ocean [J]. Applied Optics, 1997, 36(27): 6887-6894. doi: 10.1364/AO.36.006887 [10] Fry E, Katz J, Liu D, et al. Temperature dependence of the Brillouin linewidth in water [J]. Journal of Modern Optics, 2002, 49(3-4): 411-418. doi: 10.1080/09500340110088551 [11] Liu D, Xu J, Li R, et al. Measurements of sound speed in the water by Brillouin scattering using pulsed Nd: YAG laser [J]. Optics Communications, 2002, 203(3-6): 335-340. doi: 10.1016/S0030-4018(02)01181-1 [12] Gao W, Lv Z, Dong Y, et al. A new approach to measure the ocean temperature using Brillouin lidar [J]. Chinese Optics Letters, 2006, 4(7): 428-431. [13] Yuan Y, Niu Q, Liang K. Measurement error analysis of Brillouin lidar system using F–P etalon and ICCD [J]. Optics Communications, 2016, 375: 58-62. doi: 10.1016/j.optcom.2016.04.065 [14] Liang K, Ma Y, Yu Y, et al. Research on simultaneous measurement of ocean temperature and salinity using Brillouin shift and linewidth [J]. Optical Engineering, 2012, 51(6): 066002. doi: 10.1117/1.OE.51.6.066002 [15] Yu Y, Ma Y, Li H, et al. Simulation on simultaneously obtaining ocean temperature and salinity using dual-wavelength Brillouin Lidar [J]. Laser Physics Letters, 2014, 11(3): 036001. doi: 10.1088/1612-2011/11/3/036001 [16] Xu J, Ren X, Gong W, et al. Measurement of the bulk viscosity of liquid by Brillouin scattering [J]. Applied Optics, 2003, 42(33): 6704-6709. [17] Fry E, Katz J, Liu D, et al. Temperature dependence of the Brillouin linewidth in water [J]. Journal of Modern Optics, 2010, 10(3-4): 411-418. [18] Hirschberg J G, Byrne J D, Wouters A W, et al. Speed of sound and temperature in the ocean by Brillouin scattering [J]. Applied Optics, 1984, 23(15): 2624-2628. doi: 10.1364/AO.23.002624 [19] Emery Y, Fry E. Laboratory development of a lidar for measurement of sound velocity in the ocean using Brillouin scattering[C]//Proceedings of SPIE the International Society for Optical Engineering, 1997, 2963: 210-215. [20] Dai R, Gong W, Xu J, et al. The edge technique as used in Brillouin lidar for remote sensing of the ocean [J]. Applied Physics B, Lasers and Optics, 2004, B79(2): 245-248. [21] Rudolf A, Walther T. High-transmission excited-state Faraday anomalous dispersion optical filter edge filter based on a Halbach cylinder magnetic-field configuration [J]. Optics Letters, 2012, 37(21): 4477-4479. doi: 10.1364/OL.37.004477 [22] Rudolf A, Walther T. Laboratory demonstration of a Brillouin lidar to remotely measure temperature profiles of the ocean [J]. Optical Engineering, 2014, 53(5): 051407. doi: 10.1117/1.OE.53.5.051407 [23] Shi J, Ouyang M, Gong W, et al. A Brillouin lidar system using F-P etalon and ICCD for remote sensing of the ocean [J]. Applied Physics B: Lasers and Optics, 2008, 90(3-4): 569-571. doi: 10.1007/s00340-007-2866-5 [24] Huang J, Ma Y, Zhou B, et al. Processing method of spectral measurement using F-P etalon and ICCD [J]. Optics Express, 2012, 20(17): 18568. doi: 10.1364/OE.20.018568 [25] Liang K, Zhang R, Sun Q, et al. Brillouin shift and linewidth measurement based on double-edge detection technology in seawater [J]. Applied Physics B, 2020, 126(10): 160. doi: 10.1007/s00340-020-07509-1 [26] Kai S, Alexandru P, Marco G, et al. Remote water temperature measurements based on Brillouin scattering with a frequency doubled pulsed Yb: doped fiber amplifier [J]. Sensors, 2008, 8(9): 5820-5831. doi: 10.3390/s8095820 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 622
- HTML全文浏览量: 324
- 被引次数: 0











