







-
激光引信容易受到自然环境如云雾、雨雪等干扰,云雾粒子产生的后向散射回波信号被探测器接收到会导致系统测距精度急剧恶化[1-2]。为了抑制云雾对激光引信性能的影响,许多学者对抗云雾干扰进行了深入研究。Kim研究了云雾的后向散射回波中多重散射回波的比例[3]。钱荣朝提出一种滑动窗变系数相关检测法,利用云雾回波和目标回波与滑动窗模板不同的相关性来检测目标[4]。任宏光提出了一种双波长激光探测的抗干扰方法[5]。王凤杰等人基于Mie散射理论,采用蒙特卡洛方法,仿真研究了脉冲激光引信云雾的回波特性[6-7]。李京通过计算不同脉冲宽度条件下云雾后向散射的回波功率,给出了后向散射功率随着脉冲宽度变化的规律,利用不同脉冲宽度激光探测功率比的不同,来区分云雾和真实目标[8]。王瑞雪提出由于散射效应云雾的波前相位会发生严重畸变,根据哈特曼探测器的工作原理,恢复入射波的波前相位,通过云雾和目标波前相位起伏的快慢区分硬目标和云雾[9]。
从近些年国内外在激光引信抗云雾干扰技术上的研究可以得出抗云雾干扰研究主要集中在回波仿真研究方面上,抗云雾算法主要研究了如何从云雾中探测到目标,没能在测距精度方面对算法有效性进行验证。文中为了解决脉冲激光引信受到云雾干扰导致测距精度急剧恶化的问题,建立了脉冲激光引信的探测模型,提出基于高斯全波形分解的抗干扰算法,通过将回波信号分解成多个高斯脉冲叠加的方式区分出云雾后向散射回波和真实目标的回波,并进行去后向散射处理,得到真实的目标回波信号,从而得出激光引信的测距精度,这对于激光引信全天候工作方面具有重要意义。
-
脉冲激光引信的探测方式为直接探测目标反射回的回波能量来检测目标,可以按照传统的激光雷达的统计方法进行描述。传统的激光雷达方程描述了与激光探测系统有关的各个因素,以及各个因素之间的相互关系,来体现出对目标的发现能力。基于激光雷达方程建立近程探测的激光引信目标探测方程,激光回波功率P为[10]:
$$ {P}=\frac{{P}_{t}\rho {A}_{i}{A}_{r}{\eta }_{t}{\eta }_{r}{\eta }_{\rm atm}^{2R}}{{\varOmega }_{t}{R}^{4}} $$ (1) 式中:
$ {P}_{t} $ 为激光器的峰值功率;ρ为目标表面的反射率;$ {A}_{i} $ 为目标有效反射截面积;$ {A}_{r} $ 为探测器有效接收面积;$ {\eta }_{t} $ 为发射光学系统的透过率;$ {\eta }_{r} $ 为接收光学系统第透过率;${\eta }_{\rm atm}^{2 R}$ 为双程大气透过率;${\varOmega }_{t}$ 为光束发射立体角;R为目标距离。对于脉冲激光引信探测系统来说,半导体激光器发出的激光在时域上近似为高斯脉冲[9],其近高斯型功率表达式为:
$$ {P}({t})={P}_{t}\mathrm{e}\mathrm{x}\mathrm{p}\left[-\frac{{\left(t-\dfrac{\tau }{2}\right)}^{2}}{\dfrac{{\tau }^{2}}{4{\rm ln}2}}\right] $$ (2) 式中:τ为高斯脉冲的持续时间。对于指定的实体目标来说,激光引信探测系统进行探测,激光照射到目标上产生反射,探测器接收到反射回的光信号产生脉冲回波信号,脉冲回波信号稳定,与发射脉冲都为高斯脉冲[11-12]。
-
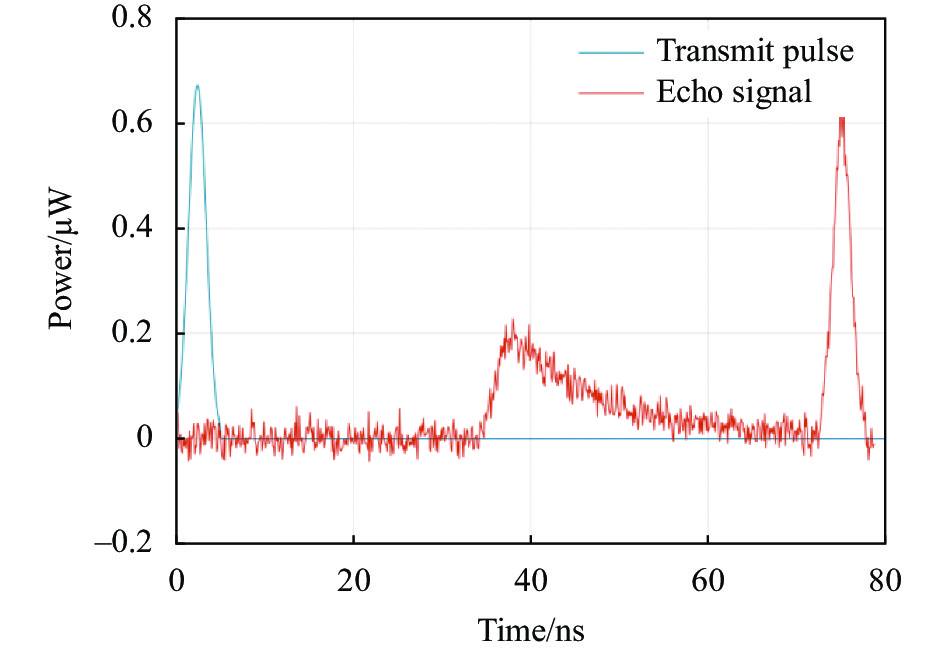
激光引信发射出的脉冲激光在云雾中传播的过程之中,云雾中悬浮的粒子对脉冲激光具有吸收和散射两个过程[13-14]。这两个过程会造成激光能量的衰减,由于激光引信发射波长处于近红外区域,云雾粒子对激光的吸收可以忽略不记,能量的衰减主要由散射引起。激光引信发射出脉冲激光中的光子和云雾粒子发生碰撞后,光子的能量和散射方向均发生了变化,如果碰撞后的光子能够被探测器接收且能量大于探测器最小探测功率,那么这部分光子能量和即为云雾后向散射的回波信号。所以对于云雾目标来说,云雾的脉冲激光回波信号是由不同云雾粒子散射产生的回波信号叠加形成的,由于各云雾粒子与激光引信距离不同,各个回波到达激光引信的时间不同,且根据朗伯比尔定律[15],光子在均匀大气中传输时透过率随着传输距离呈指数衰减,探测器接收到的能量会随着传输距离衰减,所以云雾后向散射的回波信号会发生展宽效应,并且呈现上升沿抖下降沿缓的非对称趋势,如图1所示。

图 1 云雾后向散射回波信号
Figure 1. Cloud and fog backscatter echo signal
-
根据硬目标回波和云雾后向散射回波的特征,当目标处于云雾之中时,脉冲激光在和云雾粒子碰撞后,一部分光子会照射在目标表面上,经反射后穿过云雾被探测器接收形成真实目标的回波信号,这样探测器接收到的回波中不仅有云雾后向散射形成的回波,还有真实目标的回波,由两者叠加而成。图2为仿真得到的目标在云中,能见度为1 m、3 m和5 m时探测器接收到的回波,云雾浓度使用能见度表示,仿真参数如表1所示。

图 2 不同云雾浓度下探测器接收到的回波
Figure 2. Echoes received by the detector under the different cloud and fog concentrations
表 1 仿真参数
Table 1. Simulation parameters
Parameter Value Pulse width/ns 10 Target distance/m 10.85 SNR 10 Cloud visibility/m 1,3,5 从图中可以看出,随着云雾能见度的降低,云雾浓度升高,后向散射回波信号能量逐渐增强,真实目标回波信号能量逐渐减弱。
-
云雾环境下,脉冲激光引信发出的脉冲激光在传输过程中,一部分光子与云雾粒子发生碰撞后散射,被探测器接收形成后向散射的回波信号,还有一部分光子碰撞后打在目标表面上,经过目标反射穿过云雾被探测器接收,形成了真实目标的回波信号。此时探测器接收到的回波信号是由目标回波和各个云雾粒子后向散射回波叠加而成。全波形采样的数据是波形随时间变化的函数,因此可以通过分解全波形回波的方式获得单脉冲回波信号,由单脉冲回波信号分析不同目标的特征。
在全波形分解法中,回波信号可以看做视场内不同目标对发射脉冲的散射形成的回波之和[16-18]。回波信号可以表示为:
$$ {F}\left({x}\right)=\sum _{i=1}^{N}{f}_{i}\left(x\right)+{n}\left({x}\right) $$ (3) 式中:F(x)为总的回波信号;
$ {f}_{i}\left(x\right) $ 为各个模型分量;n(x)为噪声信号。云雾干扰环境下的脉冲激光引信回波组成与公式(3)相同,所以可以选择合适的模型对脉冲激光引信的回波信号进行分解。激光引信的激光脉冲近似为高斯函数,这里采用高斯模型对回波进行分解,高斯模型如下:
$$ {F}\left({t}\right)=\sum _{i=1}^{N}{a}_{i}\mathrm{exp}\left(-\frac{{\left(t-{t}_{i}\right)}^{2}}{{\tau }_{i}^{2}/4{\rm ln}2}\right)+n\left(t\right) $$ (4) 式中:
$ {a}_{i} $ 为第i个高斯脉冲幅值;$ {t}_{i} $ 为第i个高斯脉冲峰值位置;$ {\tau }_{i} $ 为第i个高斯脉冲半高宽;n(t)为噪声。波形分解过程如下:步骤1:回波去噪并设定阈值。在获取回波数据的过程之中,不可避免地会有噪声的存在,如探测器暗电流等,所以需要对数据进行平滑去噪,文中使用高斯平滑滤波对回波进行平滑去噪。并设定合适的阈值,在分解过程中认为大于阈值的分信号称为有效回波信号。
步骤2:初始参数估计。将滤波后的回波中最大值作为一个回波分量的幅值,若最大值大于设定的阈值,那么其最大值位置对应此高斯脉冲的位置,半高宽设置与发射脉冲相同,根据各个参数建立回波分量,并将此波形分量从回波数据之中减去。在剩余的回波信号中重复步骤2中的过程,直到剩余的回波信号的幅值最大值小于阈值条件。
步骤3:回波拟合。根据步骤2中提取到的各个分量的参数,对分量回波进行拟合,得到全波形分解的结果。
步骤4:去除云雾后向散射回波。根据云雾后向散射点回波特性,云雾的回波展宽是由不同距离处的云雾粒子后向散射回波叠加造成的,所以若出现在时域上连续且幅值逐渐减小的几个高斯脉冲,则判定为云雾后向散射回波,对其进行去除,得到真实目标的回波。
高斯全波形分解算法伪代码实现如下:
Algorithm Gaussian full waveform decomposition
Input: Echo signal under the interference of clouds and fogOutput: Remove the backscattered echo signal1 Set up the decomposition model (t)2 Sample Echo signal E03 Threshold setting K and echo denoising E14 while not done do6 for E1 do7 Initial parameters from E18 if a1_amplitude > K9 a1= a1_amplitude;10 t1=t1_amplitude;11 end if12 end for13 for leftecho do14 if ai_amplitude < K delete left echo15 end if16 end for17 Fit each component18 end while
-
为了验证高斯全波形分解算法的适用性以及测距精度,仿真了云雾能见度为5 m环境下目标距离激光引信10.85 m时探测器接收到的回波信号。仿真得到的回波信号如图3所示。由于接收到的回波信号与发射脉冲相比微弱,为了方便观察,所以将发射脉冲与回波信号统一到同一量级,可以看出回波中包含着真实目标回波信号、云雾后向散射回波信号以及噪声。

图 3 回波信号仿真图
Figure 3. Simulation diagram of echo signal
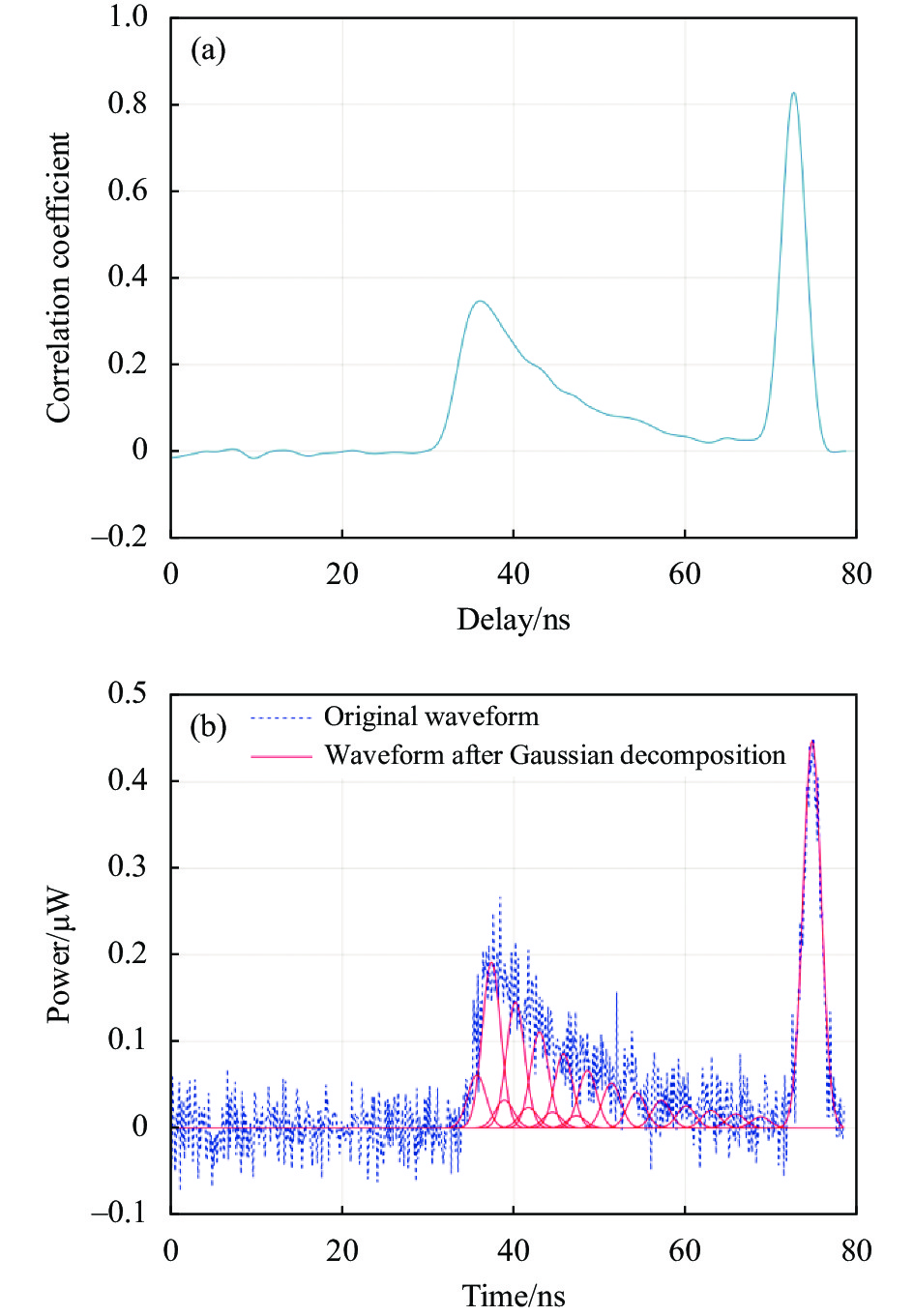
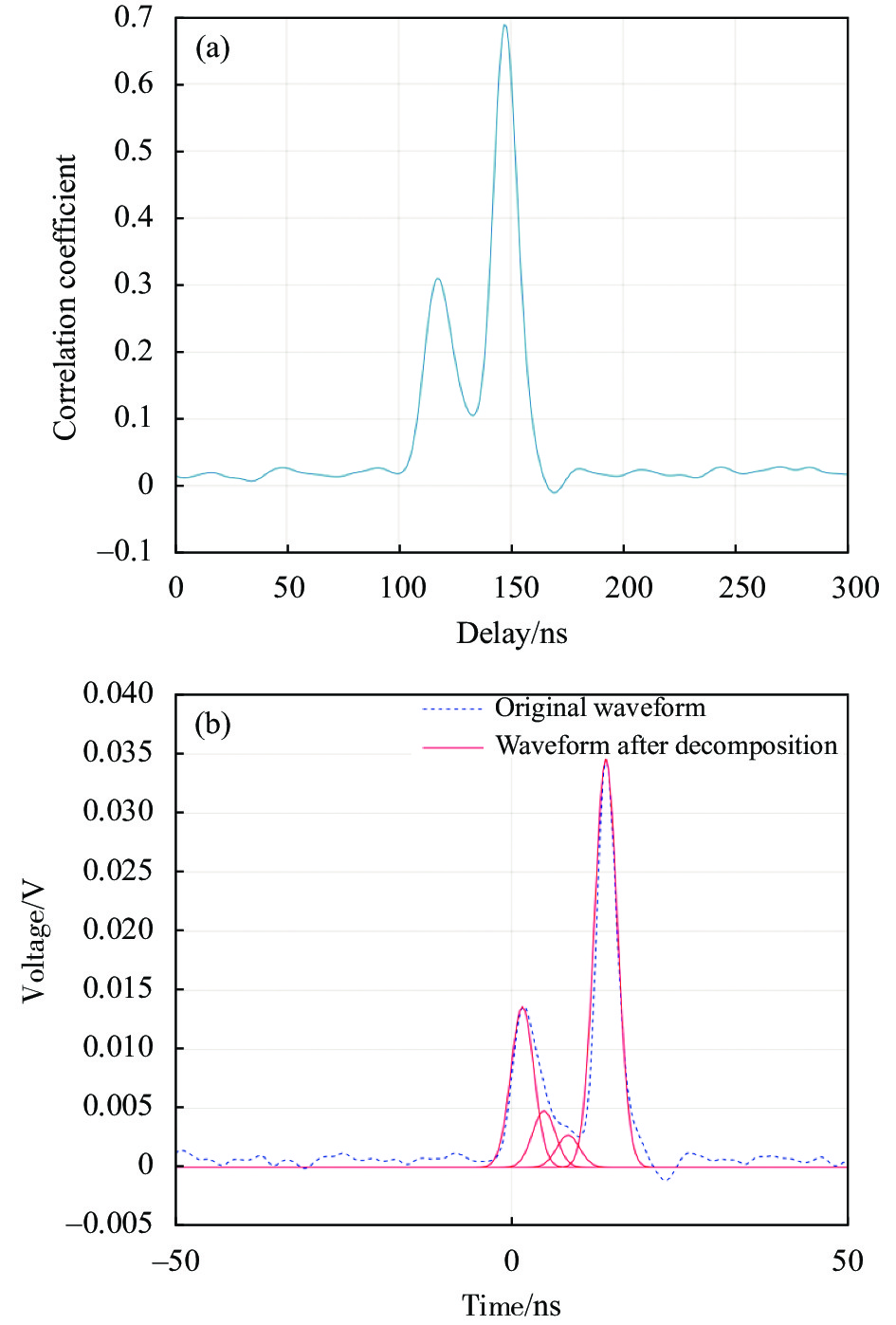
仿真得到的回波信号采用文献报道的相关算法和高斯全波形分解算法进行处理。图4显示了两种算法的处理结果。
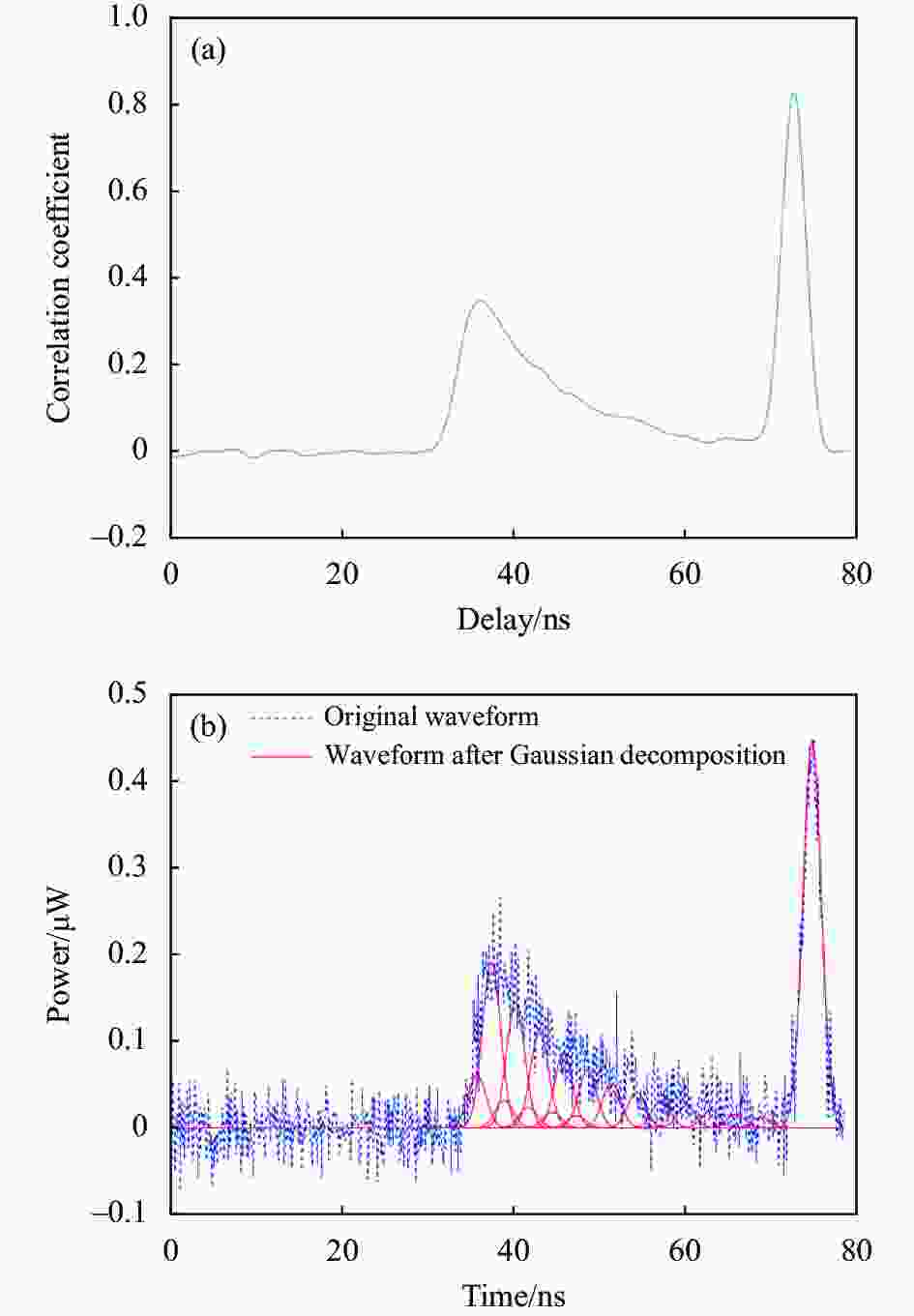
图 4 仿真数据算法处理结果。 (a) 互相关算法;(b) 高斯分解算法
Figure 4. Processing results of simulation data algorithm. (a) Cross-correlation algorithm; (b) Gaussian decomposition algorithm
图4(a)为相关算法的处理结果,根据相关的定义,互相关函数的横坐标代表着一个信号在另一个信号上移动的单位数量,所以对互相关结果进行峰值检测,找到目标相关峰峰值所对应的横坐标即为目标回波相对于发射脉冲的延时。然后根据公式(5)即可计算出目标到激光引信的距离为[19]:
$$ R=c\times \frac{\Delta t}{2} $$ (5) 式中:R为目标到激光引信的距离;c为光速;
$\Delta $ t为发射脉冲与目标回波脉冲之间的延时。在图4云雾条件下互相关算法仿真计算出目标到激光引信的距离,得到测距精度为0.055 m。同样仿真条件下对于全波形高斯分解算法来说,得到了图4(b)所示的结果。从图中结果可以看出,对于真实目标产生的回波信号来说,拟合后是一个单独的高斯脉冲,而对于云雾后向散射形成的回波信号,是由多个在时域上连续且幅值逐渐减小的高斯脉冲叠加而成。通过这一判据可以识别出云雾后向散射的回波信号和真实目标的回波信号,从而从回波信号之中去除云雾干扰回波,提取出真实目标的回波。去除云雾的干扰之后,回波之中只存在真实目标的回波,计算出目标回波与发射脉冲的延时及目标到激光引信的距离。
通过对高斯全波形分解算法进行200次测距结果的仿真。仿真参数设置为目标距离激光引信10.85 m,回波信号信噪比分别为15、10、5,得到的仿真测距精度如图5所示。

图 5 不同信噪比下的测距精度
Figure 5. Ranging accuracy under different signal-to-noise ratios
从图5中可以看出,在回波信号高信噪比条件下,测距精度可以保持在0.02 m,随着信噪比的下降,测距精度会变差,当信噪比为5时,得到测距精度为0.16 m。
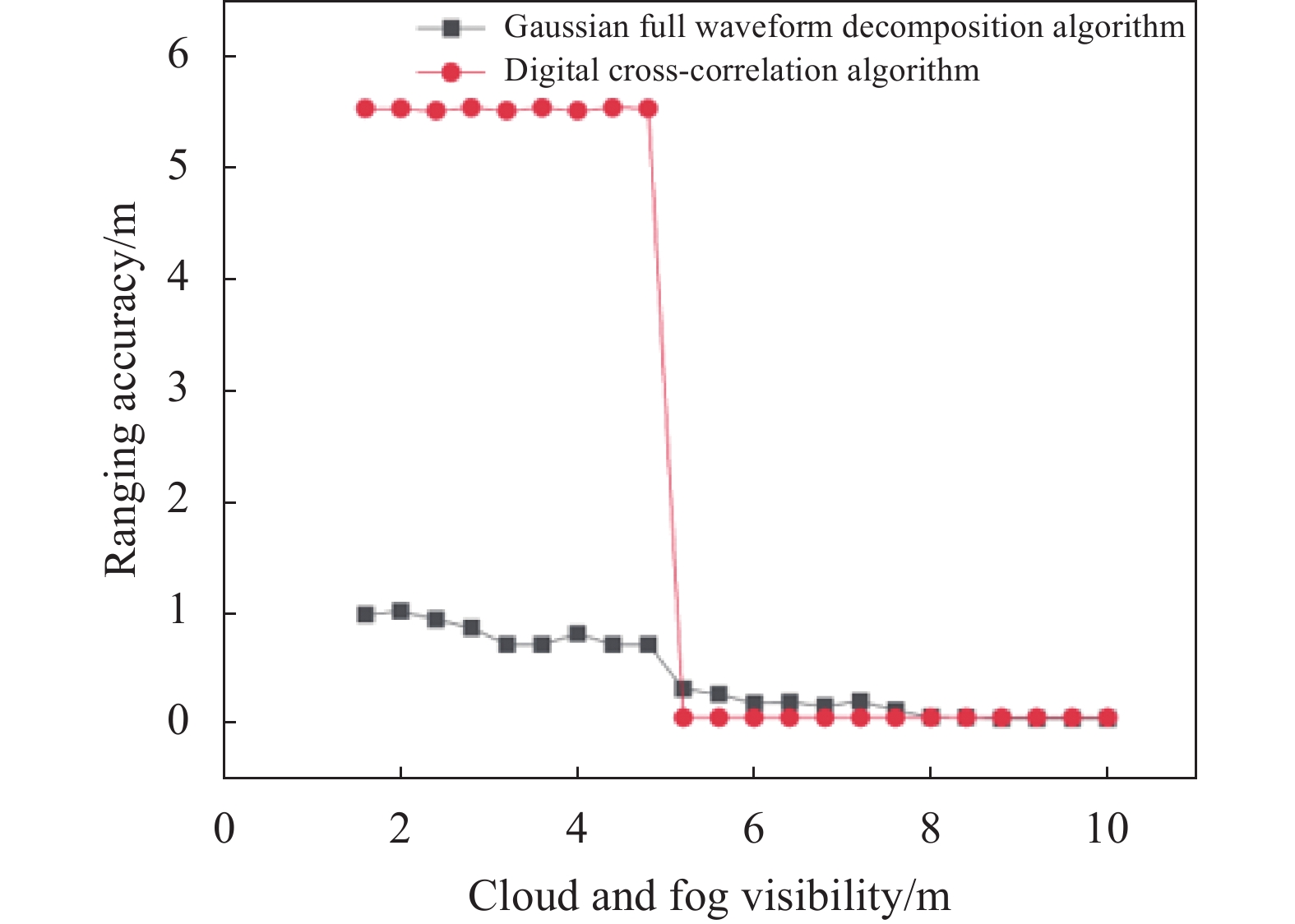
同时为了研究不同云雾浓度下算法的适用性,仿真计算了不同云雾浓度下的两种算法的测距精度,图6所示为仿真得到的结果拟合成的测距精度曲线,云雾浓度使用能见度来表征。

图 6 不同云雾浓度下的测距精度
Figure 6. Ranging accuracy under different cloud and fog concentrations
从图6可知,互相关算法在云雾能见度较高的时候测距精度较高,但是随着云雾浓度的升高,当能见度小于5 m时,受云雾影响较大,会将云雾后向散射的回波认为是真实目标导致算法失去作用。高斯全波形分解算法与互相关算法相比,在云雾能见度高的时候测距精度相当,但是随着云雾浓度变大,当互相关算法失效时,高斯全波形分解算法的测距精度变化较小,测距精度能够保持在厘米量级,所以高斯全波形分解算法具有更好的抗云雾干扰能力。
-
在仿真的基础上,为了验证算法在实际应用中的适用性,利用课题组研制的激光引信进行实验验证。激光引信的光源采用半导体激光二极管,信号处理系统发出脉冲触发信号经过激光发射电路整形后驱动激光二极管发出脉冲频率10 kHz,脉冲宽度10 ns,波长1064 nm的脉冲激光。激光引信接收端探测器采用带宽为70 MHz,上升时间6 ns,灵敏度为36 A/W的高灵敏度APD光电二极管,其将接收光学系统接收到的光信号转换成电信号,再经过第一级跨阻放大器和第二级的放大器将接收到的微弱信号放大得到高信噪比回波信号。以500 M/s的采样速率对回波信号进行采样,得到的回波数据经过一定处理,计算与发射端同步触发信号之间的延时。脉冲激光引信的原理框图如图7所示。
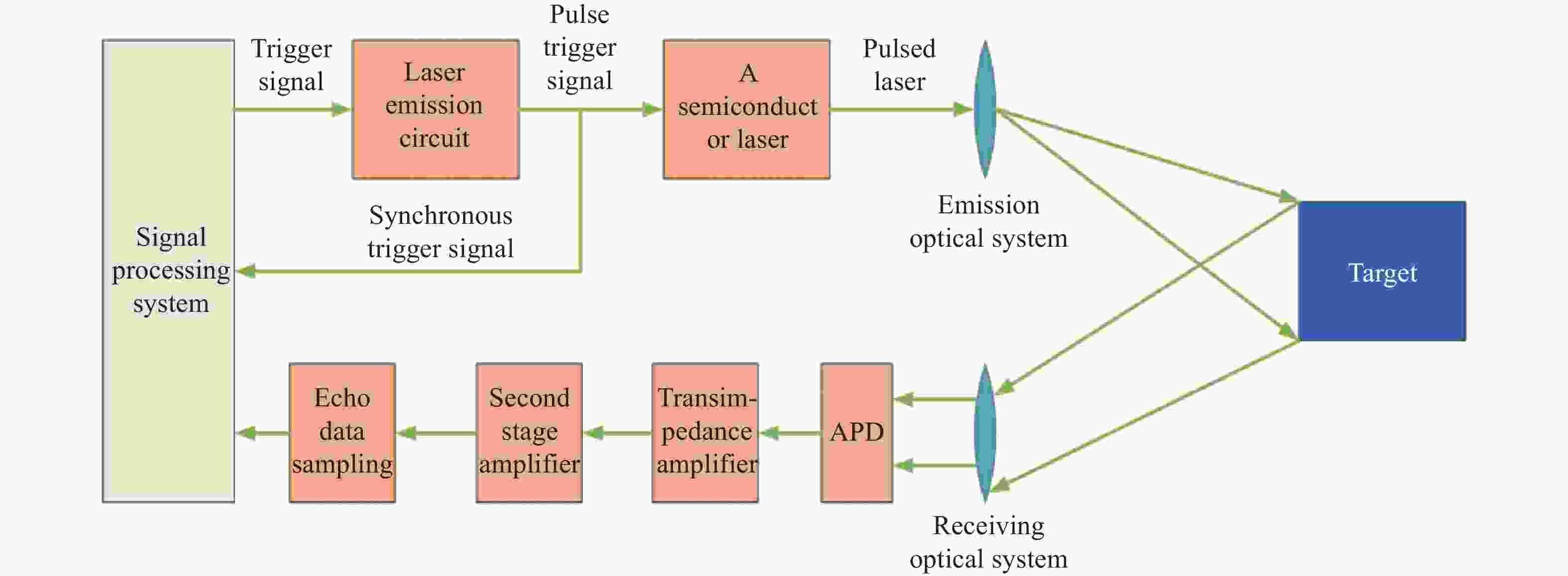
图 7 脉冲激光引信原理框图
Figure 7. Block diagram of pulsed laser fuze
根据激光引信的原理框图搭建了激光引信实验平台,在实验过程中,使用平面物体作为激光引信的目标,将目标放置在距离激光引信3 m的位置处,使用加湿器在激光的路径之上模拟云雾的效果,通过调节加湿器档位来改变云雾浓度,为了达到与仿真参数相对应的条件,在不同云雾浓度下,使用带宽为1.2 GHz,上升时间1 ns,灵敏度为0.95 A/W的光电探测器分别接收云雾前后的激光,根据云雾前后激光能量来计算出衰减系数,进而根据经验公式(6)来计算云雾能见度[20]为:
$$ \begin{split} \\ \mathrm{\mu }=\dfrac{3.912}{V}\cdot{\left(\frac{\lambda }{0.55}\right)}^{-q} \end{split} $$ (6) 式中:μ为衰减系数;V为能见度;λ为波长;q为经验系数[21](能见度小于0.5 km取0)。
实验过程中,计算得到的衰减系数与能见度的对应关系见表2。
表 2 衰减系数与能见度对应
Table 2. Corresponding attenuation coefficient and visibility
Attenuation coefficient Visibility/m 1.304 3 0.782 5 0.559 7 0.435 9 实验过程中为了方便光路调整,使用波长532 nm的绿光作为指示光,实验场景图如图8所示。
图 8 实验场景图
Figure 8. Diagram of experimental scene
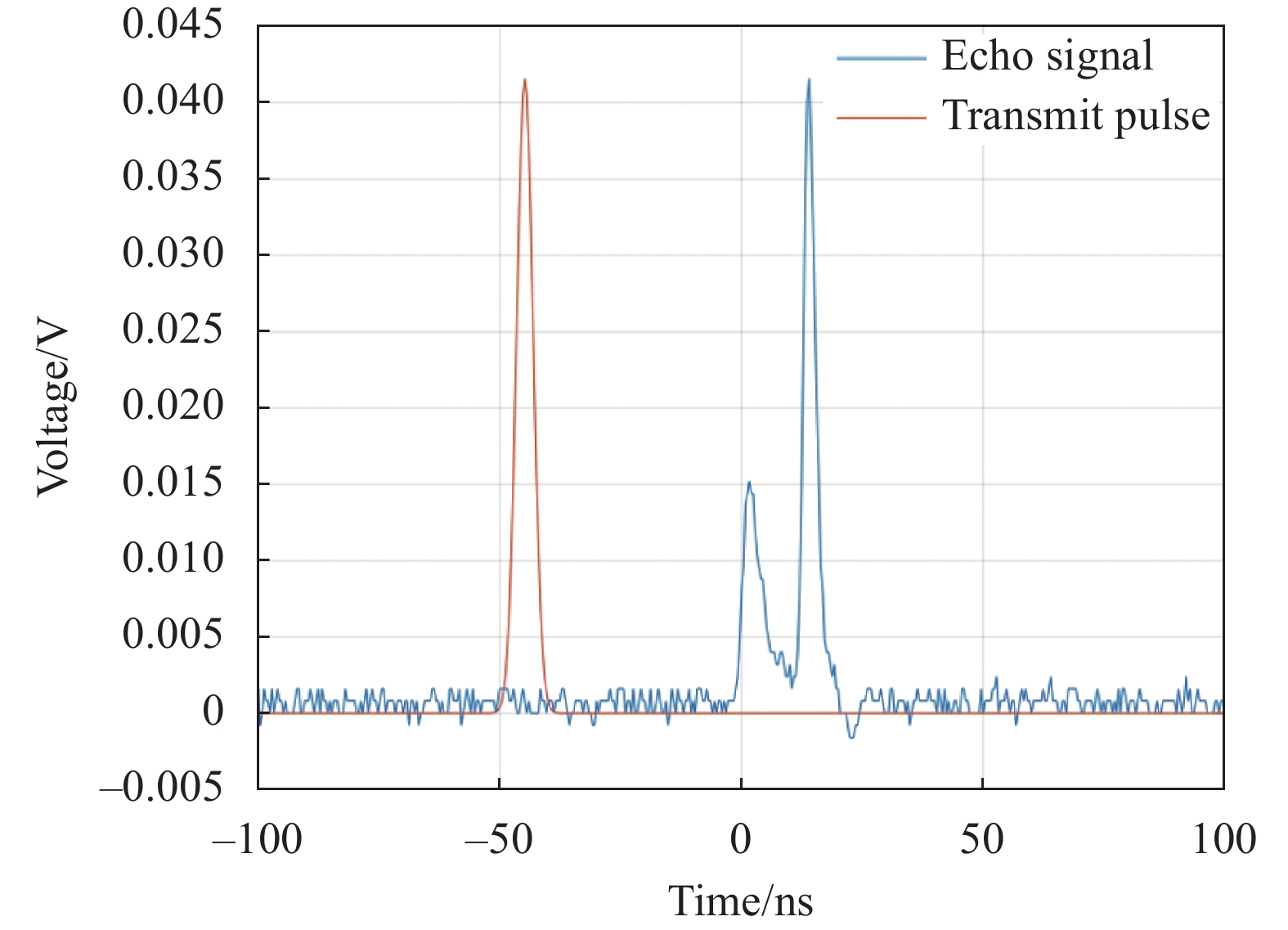
图9所示为实验过程中云雾能见度为5 m条件下采集到的回波数据拟合结果,分别采用数字互相关算法和高斯全波形算法进行处理。图10显示了两种算法的处理结果。

图 9 5 m云雾能见度采集的激光引信回波
Figure 9. Laser fuze echoes collected in 5 m cloud and fog visibility

图 10 实验数据算法处理结果。 (a) 互相关算法;(b) 高斯分解算法
Figure 10. Algorithm processing results of experimental data. (a) Cross-correlation algorithm; (b) Gaussian decomposition algorithm
由于在实验过程中,激光引信系统本身存在固有的延时,所以在计算延时大小时应该减去系统自身延时,经过实验测量系统内部的延时为38 ns。所以根据采集到的数据经过互相关处理后计算出目标与激光引信的距离,得到测距精度为0.16 m。
同样对采集到的回波数据进行全波形高斯分解算法处理后,计算发射脉冲与回波信号的延时得到目标与激光引信的距离,经过计算此时的测距精度为0.12 m。
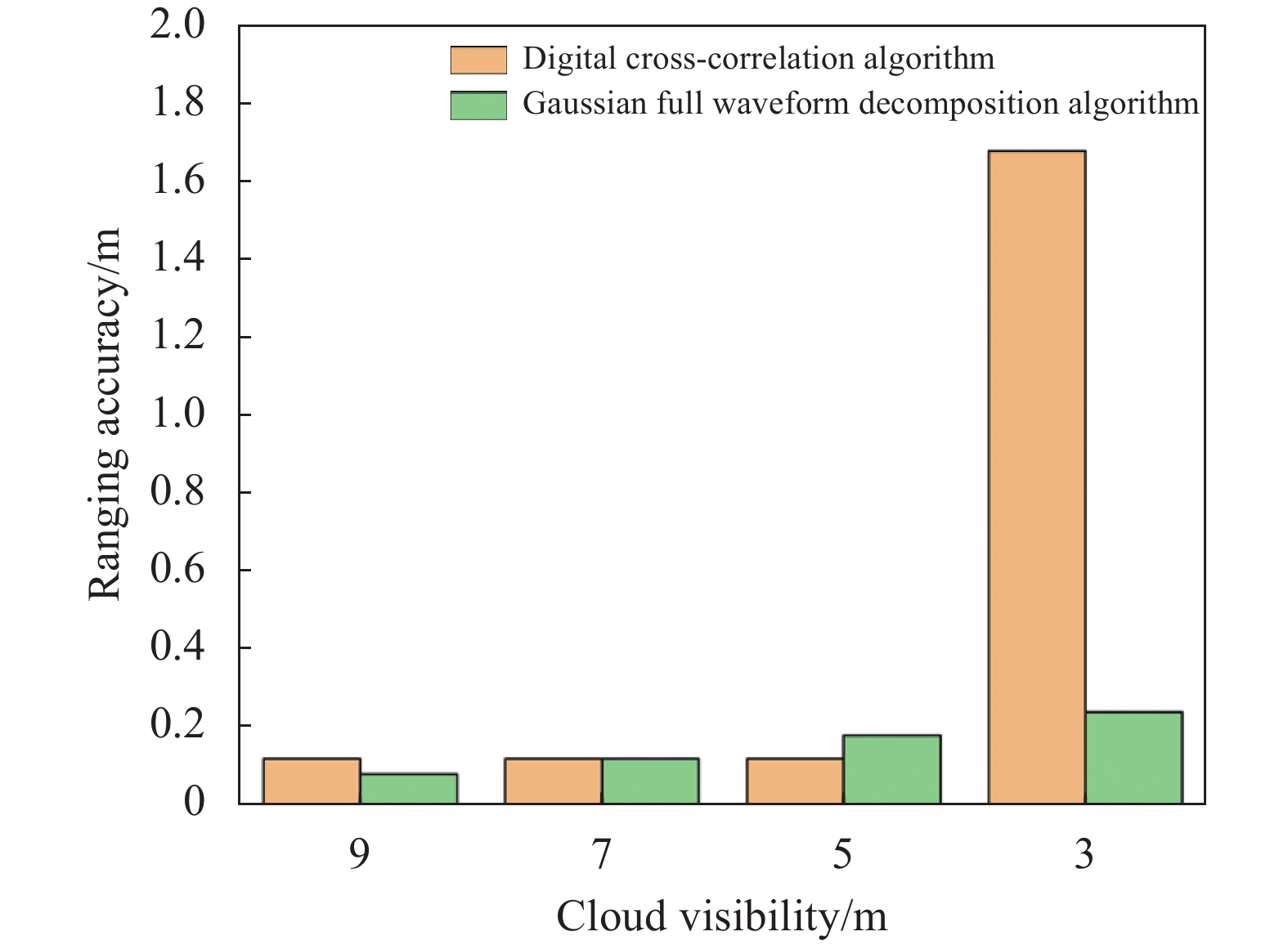
实验过程中通过改变加湿器档位来调节云雾浓度,所以同样得到了不同云雾浓度下的回波数据,对这些数据分别进行互相关算法以及高斯全波形分解算法处理,得到不同云雾浓度下两种算法的测距精度,其测距精度结果如图11所示。

图 11 不同云雾浓度下的测距精度
Figure 11. Ranging accuracy under the different cloud and fog concentrations
在图11所示的结果中,随着云雾浓度的升高,互相关算法测距精度急剧下降,而高斯全波形分解算法仍然能够保持高测距精度。实验得到得结果与仿真规律一致,在高浓度云雾环境下,高斯全波形分解算法具有更好的适用性和高测距精度。
-
文中根据脉冲激光引信的回波信号特征,进行了数学建模,建立了脉冲激光探测模型,并结合云雾和目标的回波特征设计了全波形高斯分解抗云雾干扰算法。通过理论仿真以及实验与文献报道的数字互相关算法进行了对比,结果表明,在云雾浓度较高能见度为3 m时,互相关算法测距精度急剧下降,测距精度恶化到1.6 m以上。而高斯全波形分解算法能够保证0.18 m的测距精度,有效地提高了高云雾浓度下脉冲激光引信抗云雾干扰能力。
Gaussian decomposition ranging method for laser fuze under cloud and fog interference conditions
-
摘要: 在云雾影响下,脉冲激光引信存在着虚警概率高、测距精度差的问题,这些问题是制约激光引信全天候工作的主要问题。为了降低云雾对于全波形采样激光引信的影响,提出一种基于高斯分解的回波脉冲处理方法,采用高斯模型将回波信号分解成单独高斯脉冲的形式,根据波形特征分辨出真实目标回波与云雾后向散射回波。从理论仿真和实验上对比了该方法与数字互相关方法的性能差异,结果表明:在能见度小于4 m的云雾条件下,数字互相关法测距精度恶化到1.6 m,而高斯分解法能够实现0.18 m的测距精度,优于互相关处理方式。该方法为激光引信在云雾环境下高精度测距提供了新的数据处理思路。Abstract: Under the influence of cloud and fog, pulsed laser fuze has the problems of high false alarm probability and poor ranging accuracy. These problems restrict the all-weather work of laser fuze. In order to reduce the influence of cloud and fog on the full-waveform sampling laser fuze, the paper proposes an echo pulse processing method based on Gaussian decomposition. The Gaussian model is used to decompose the echo signal into the form of individual Gaussian pulses, the real target echo and backscatter echoes of cloud and fog can be distinguished according to the waveform characteristics. The performance differences between the Gaussian decomposition method and the digital cross-correlation methods are compared from theoretical simulation and experiments. The results show that under the condition of cloud and fog with visibility less than 4 m, the ranging accuracy of the digital cross-correlation method deteriorates to 1.6 m, while the ranging accuracy of the Gaussian decomposition method can achieve a distance of 0.18 m, it is better than traditional cross-correlation process. It provides a new data processing idea for the high-precision ranging of laser fuze in cloudy and foggy environment.
-
Key words:
- pulsed laser fuze /
- backscatter /
- full wavefom decomposition /
- anti-cloud interference
-
图 2 不同云雾浓度下探测器接收到的回波
Figure 2. Echoes received by the detector under the different cloud and fog concentrations
图 4 仿真数据算法处理结果。 (a) 互相关算法;(b) 高斯分解算法
Figure 4. Processing results of simulation data algorithm. (a) Cross-correlation algorithm; (b) Gaussian decomposition algorithm
图 6 不同云雾浓度下的测距精度
Figure 6. Ranging accuracy under different cloud and fog concentrations
图 9 5 m云雾能见度采集的激光引信回波
Figure 9. Laser fuze echoes collected in 5 m cloud and fog visibility
图 10 实验数据算法处理结果。 (a) 互相关算法;(b) 高斯分解算法
Figure 10. Algorithm processing results of experimental data. (a) Cross-correlation algorithm; (b) Gaussian decomposition algorithm
图 11 不同云雾浓度下的测距精度
Figure 11. Ranging accuracy under the different cloud and fog concentrations
表 1 仿真参数
Table 1. Simulation parameters
Parameter Value Pulse width/ns 10 Target distance/m 10.85 SNR 10 Cloud visibility/m 1,3,5  下载: 导出CSV
下载: 导出CSV
表 2 衰减系数与能见度对应
Table 2. Corresponding attenuation coefficient and visibility
Attenuation coefficient Visibility/m 1.304 3 0.782 5 0.559 7 0.435 9
下载: 导出CSV
-
[1] Zhang W, Li Y L, Huang Z H, et al. Research on the characteristics of fog backscattering signals for frequency modulated continuous wave laser fuze [J]. Optik, 2016, 127(20): 9046-9055. doi: 10.1016/j.ijleo.2016.06.129 [2] Zhang W, Li Y L, Huang Z H, et al. Fog backscattering interference suppression algorithm for FMCW laser fuze based on normalized frequency spectrum threshold [J]. Optik, 2017, 131: 188-193. doi: 10.1016/j.ijleo.2016.11.084 [3] Kim D, Du C H, Kim Y, et al. Optical depth and multiple scattering depolarization in liquid clouds [J]. Opt Rev, 2010, 17: 507-512. doi: 10.1007/s10043-010-0091-7 [4] Qian R C, Gui Y N, Dong W B, et al. Variable coefficient correlation detection of laser fuze echo pulses [J]. Journal of Detection & Control, 2014, 36(5): 1-5. (in Chinese) [5] Ren H G, Yu H S, Huo L J, et al. Anti-interference of dual-wavelength laser fuze [J]. Journal of Detection & Control, 2015, 37(1): 1-4. (in Chinese) [6] Wang F J, Chen H M. Simulation of characteristics of cloud and fog echo for pulse laser fuze [J]. Optics and Precision Engineering, 2015, 23(10): 12-18. (in Chinese) [7] Wang F J, Chen H M, Ma C, et al. Construction of back-scattering echo caused by cloud in laser fuze [J]. Optik, 2018, 171: 153-160. doi: 10.1016/j.ijleo.2018.06.028 [8] Li J, Mei H, He C L, et al. Laser fuze anti-interference method based on pulse width modulation technique [J]. Infrared and Laser Engineering, 2020, 49(4): 0403007. (in Chinese) doi: 10.3788/IRLA202049.0403007 [9] Wang R X, Liu F, Jia X D, et al. Laser detection technology based on wavefront measurement [C]//Proceedings of SPIE, 2020, 11567: 811-816. [10] Xu X B, Zhang H, Zhang X J, et al. Effect of plane target characteristics on ranging distribution for pulse laser detection [J]. Acta Physica Sinica, 2016, 65(21): 210601. (in Chinese) doi: 10.7498/aps.65.210601 [11] Li H S, Zhang X Q. Laser echo characteristics and detection probability calculation on the space projectile proximity fuze [J]. Optik, 2019, 183: 713-722. doi: 10.1016/j.ijleo.2019.02.108 [12] Chen S S, Zhang H, Xu X B. Echo characteristic of planar target in pulsed laser fuze detection [J]. Acta Armamentarii, 2018, 39(6): 1095-1102. (in Chinese) [13] Liu M, Zhang G Y, An Z Y, et al. Detection method for ranging performance of IR laser rangefinder based on aerosol echo simulation [J]. Optik, 2016, 127(1): 25-29. doi: 10.1016/j.ijleo.2015.09.182 [14] Romain C, Matthew J B. Aerosol light extinction and back-scattering: A review with a lidar perspective [J]. Journal of Quantitative Spectroscopy and Radiative Transfer, 2021, 262: 107492. doi: 10.1016/j.jqsrt.2020.107492 [15] Haim A, Henrik B, Preben B. Correction to the Beer-Lambert-Bouguer law for optical absorption [J]. Appl Opt, 2008, 47(29): 5354-5357. doi: 10.1364/AO.47.005354 [16] Xie J F, Yang C C, Mei Y K, et al. Full waveform decom-position of spaceborne laser based on genetic algorithm [J]. Infrared and Laser Engineering, 2020, 49(11): 20200245. (in Chinese) doi: 10.3788/IRLA20200245 [17] Wu Q Q, Qiang S Z, Wang Y Q, et al. Lidar full-waveform decomposition based on empirical mode decomposition and local-Levenberg-Marquard fitting [J]. Appl Opt, 2019, 58(29): 7943-7949. doi: 10.1364/AO.58.007943 [18] Song S L, Wang B H, Gong W, et al. A new waveform decomposition method for multispectral LiDAR [J]. ISPRS Journal of Photogrammetry and Remote Sensing, 2019, 149: 40-49. doi: 10.1016/j.isprsjprs.2019.01.014 [19] Song Q Y, Ma X C. High-resolution time delay estimation algorithms through cross-correlation post-processing [J]. IEEE Signal Processing Letters, 2021, 28: 479-483. doi: 10.1109/LSP.2020.3048843 [20] Kim I I, Mcarthur B, Korevaar E J. Comparison of laser beam propagation at 785 nm and 1550 nm in fog and haze for optical wireless communications [C]//Proceedings of SPIE, 2001, 4214: 26-37. [21] Al Naboulsi M C, Sizun H, de Fornel F. Fog attenuation prediction for optical and infrared waves [J]. Optical Engineering, 2004, 43(2): 319-329. doi: 10.1117/1.1637611 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 216
- HTML全文浏览量: 41
- PDF下载量: 44
- 被引次数: 0



















