







-
低空慢速小目标,简称低慢小目标,是指具有低空飞行、飞行速度小、不易被发现等部分特征或全部特征的小型航空器和空飘物[1]。常见的低慢小目标包括四旋翼无人机等小型航空器,以及风筝、气球等空飘物。由于低慢小目标飞行高度低、反射截面小、热信息弱,不利于探测信息获取。雷达系统对其探测困难,光学成像系统对其识别难度也较大。探测、识别和处置低慢小目标已成为各国重大安保活动的世界性难题[2-3]。
低照度背景下的低慢小目标属于弱小目标,因为此时目标尺寸小于80个像素且信噪比低[3]。夜晚等低照度背景下,由于环境照度的严重不足,光学成像系统采集的图像效果很差,目标的大部分细节信息被淹没在背景中,系统作用距离受限。另外,由于弱小目标成像面积小,导致图像信噪比低和无明显结构纹理特征,更不利于后续图像处理、信息提取和目标识别[4-5]。
光学成像系统可分为被动成像和主动成像两种方式。被动成像方式无照明光源,单纯依赖目标自然光、环境光以及自身热辐射,通过光学成像系统获取目标信号并最终成像到探测器。具体地,被动成像方式有可见光成像、微光夜视、红外成像等光电方法。被动成像方式具有隐蔽性好、系统简单、可靠性高的优点,因此只要能够满足性能要求常采用被动成像方式。但被动成像方式的作用距离受到天空背景照度、气象条件、目标温度对比度等限制,难以实现远距离或全天时弱小目标的探测识别,如夜晚目标成像、远程暗目标探测、深空目标探测等[6]。
当被动成像方式遇到瓶颈时,可选用主动成像方式。主动成像是一种将激光技术、成像传感器控制和弱小目标图像处理技术融合、实现对远距离弱小目标进行探测和识别的技术,具有成像清晰、对比度高的优点,能够克服传统被动成像的许多缺点,可全天时探测和识别目标[7]。具体实现上,主动成像方式有可见光主动照明、近红外主动照明、距离选通等。激光主动照明技术可用于地面光电观瞄、武器系统的探测识别等多种场合下的目标成像探测识别[8]。
为了在低照度背景下,完成对以四旋翼无人机为代表的弱小目标进行探测和识别。文中通过外场实验对比可见光、微光夜视、长波红外、激光主动照明等成像方法的优劣,为不同环境照度的实际工程系统应用提供基础数据。
-
红外热成像是指利用目标的自身热辐射,通过红外光学系统对热辐射信息的采集而获取图像的过程。红外热成像具有穿云透雾、抗干扰和作用距离远等优点,在军事和民用产品中得到了广泛的应用,特别是针对带有发动机的动目标以及人脸等温升异常目标。
对于长波红外热成像系统,噪声等效温差(NETD)是其灵敏度指标。NETD的理论公式如下[6]:
式中:Ω为成像系统瞬时视场;A为探测器接收面积;Δf为等效噪声带宽;D为成像系统口径;
$ {t}_{o} $ 为光学系统光学效率;D*为探测器探测率;MT为表面光谱辐射函数;δ为过程因子。 -
激光主动照明成像的工作原理如图1所示,采用照明激光器主动照射的方式,照明光束覆盖被测目标,成像系统用于收集目标表面反射后的激光能量并最后成像至探测器[11]。根据作用距离和目标成像区域大小不同,可调节照明光束的发散角,将目标特定区域照亮,满足成像系统信噪比要求,实现对目标精确成像和特征点跟踪。
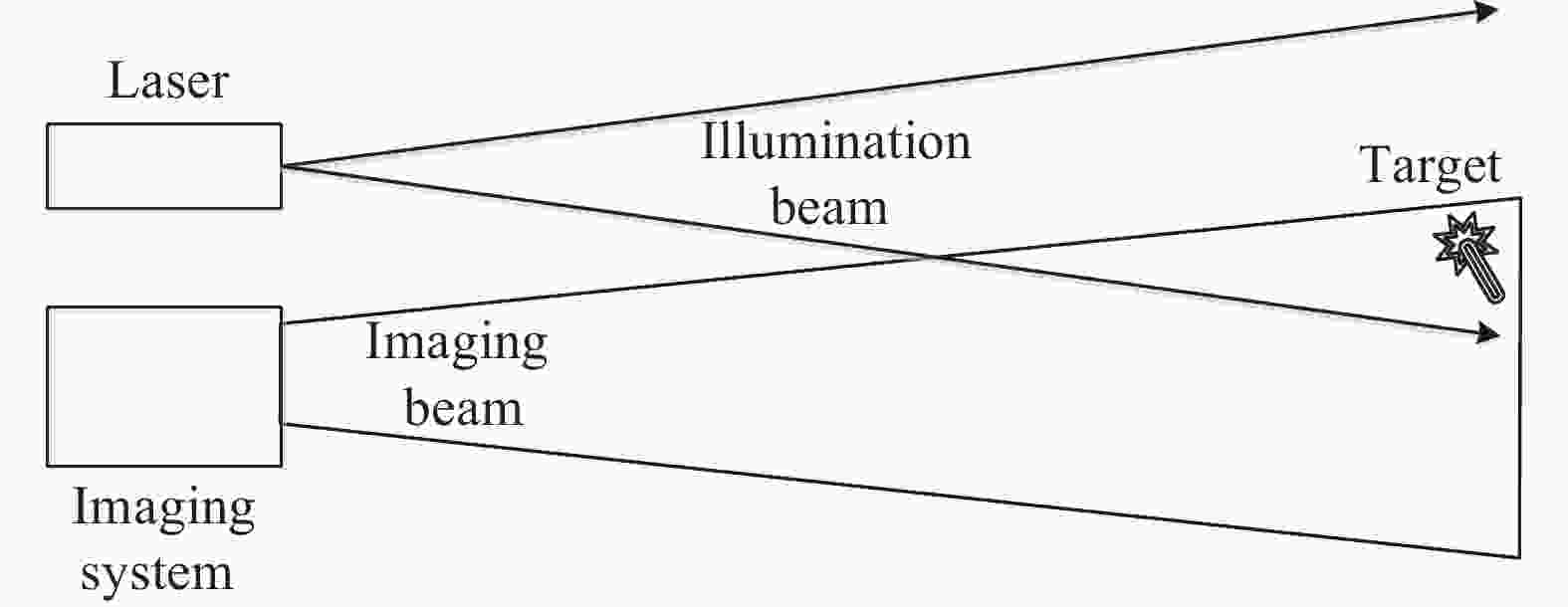
Figure 1. Schematic diagram of laser active illuminated imaging
激光主动照明成像系统的作用距离与信噪比、激光照射功率、光路效率等相关。假定目标表面为朗伯分布,照明光束覆盖区域为目标探测区域。根据激光雷达方程,可得激光主动照明成像系统的作用距离表达式[12]:
式中:P为连续激光照射平均功率;R为作用距离;E为探测器照度灵敏度阈值;K为光源的光视效能;θ为照射视场角度;ρ为目标表面反射率;ta为大气传输光路效率。
-
外场成像实验区域为东北地区城市郊区。环境温度为−18~+20 ℃,湿度范围16%~40%,能见度9.7 km,不同时段环境背景照度范围为10−2~10−5 lx。
被测目标为某典型四旋翼无人机,尺寸290 mm×290 mm×196 mm,最大水平飞行速度20 m/s。
-
可见光成像相机参数为:焦距14~500 mm可调,视场大小28°×21°~0.8°×0.6°,像元为3.75 μm×3.75 μm。
不同时段可见光成像相机图像采集结果如图2、图3所示。图2为傍晚时(时间17:00)环境照度为10−1 lx时采集的图像,目标像素数为8×8,表明在1 km处可见光成像相机可识别四旋翼无人机。但时间19:00后环境照度低于10−2 lx时,目标区域的可见光图像已全黑,在1 km处已无法观测任何目标,如图3所示。

Figure 2. Observation image of visible light camera at 1 km (time 17:00)

Figure 3. Observation image of visible light camera at 1 km (time 19:00)
-
实验用微光探测器件为低照度CMOS图像传感器,光谱响应覆盖可见光及近红外波段,在400 ~1100 nm之间。微光夜视成像系统焦距为200 mm,视场大小为6.4°×6.4°,像元尺寸为11 µm×11 µm。
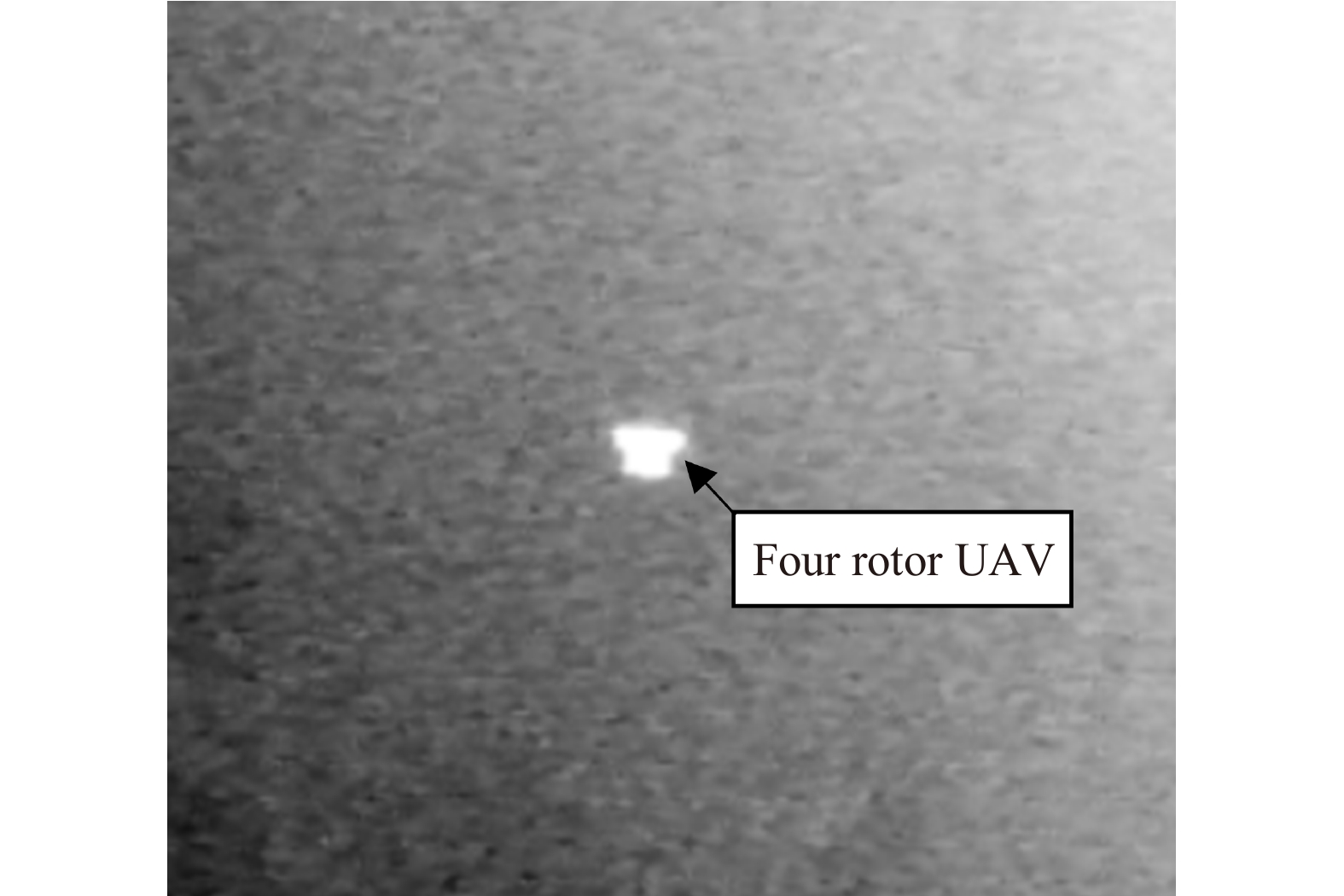
微光夜视外场成像实验过程如下:(1)当可见光成像相机无法获取图像后,启用微光夜视成像系统;(2)时间19:00、环境照度为5×10−3 lx、1 km处微光夜视系统成像效果如图4所示,普通模式探测器无增益时可识别亮背景下的电线塔等目标,但无法观测到无人机目标;(3)晚上20:00后,环境照度降至5×10−4 lx,微光夜视探测器开启高增益模式,距离0.5 km处可观测到无人机亮点,目标所占像素数为6×6,如图5所示。

Figure 4. Observation image of night vision system at 1 km (normal mode, time 19:00)
Figure 5. Observation image of night vision system at 0.5 km (high gain, time 20:00)
-
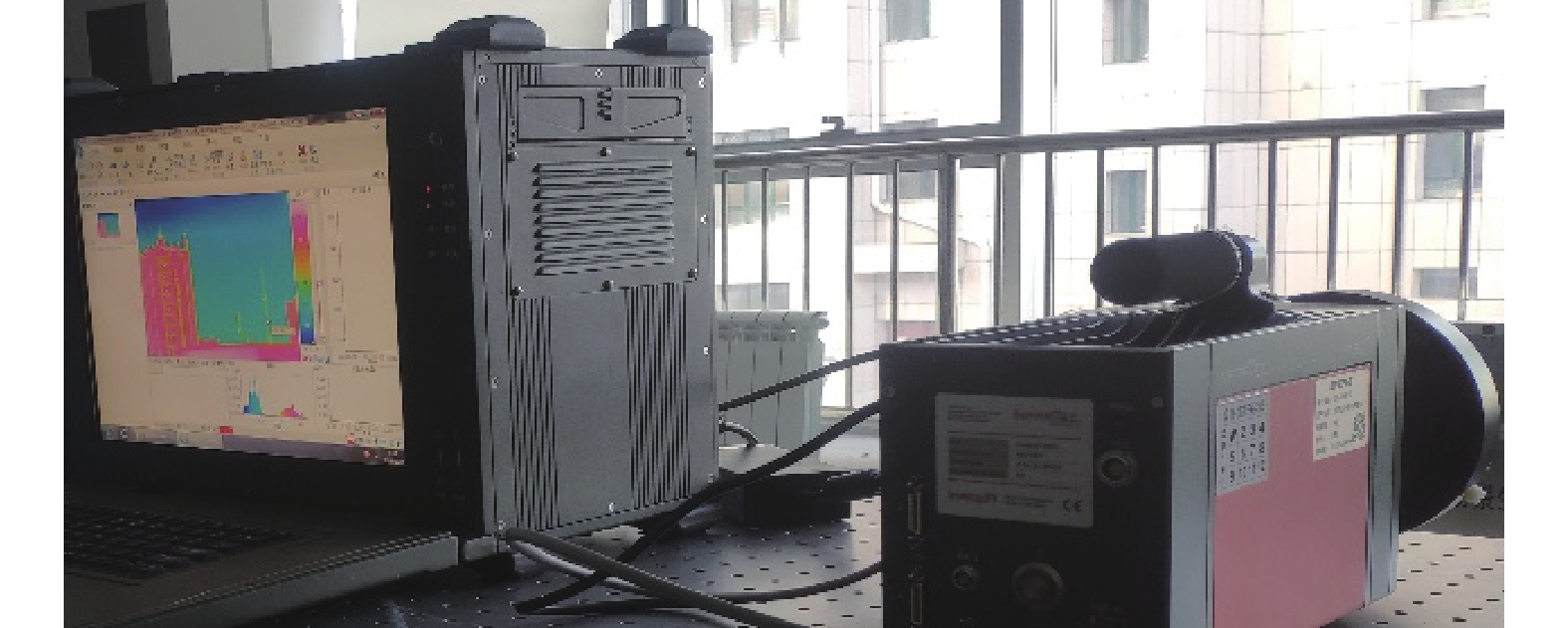
红外热成像外场实验设备为长波制冷红外热像仪,如图6所示,焦距100 ~200 mm,分辨率1024×768,像元大小16 μm。
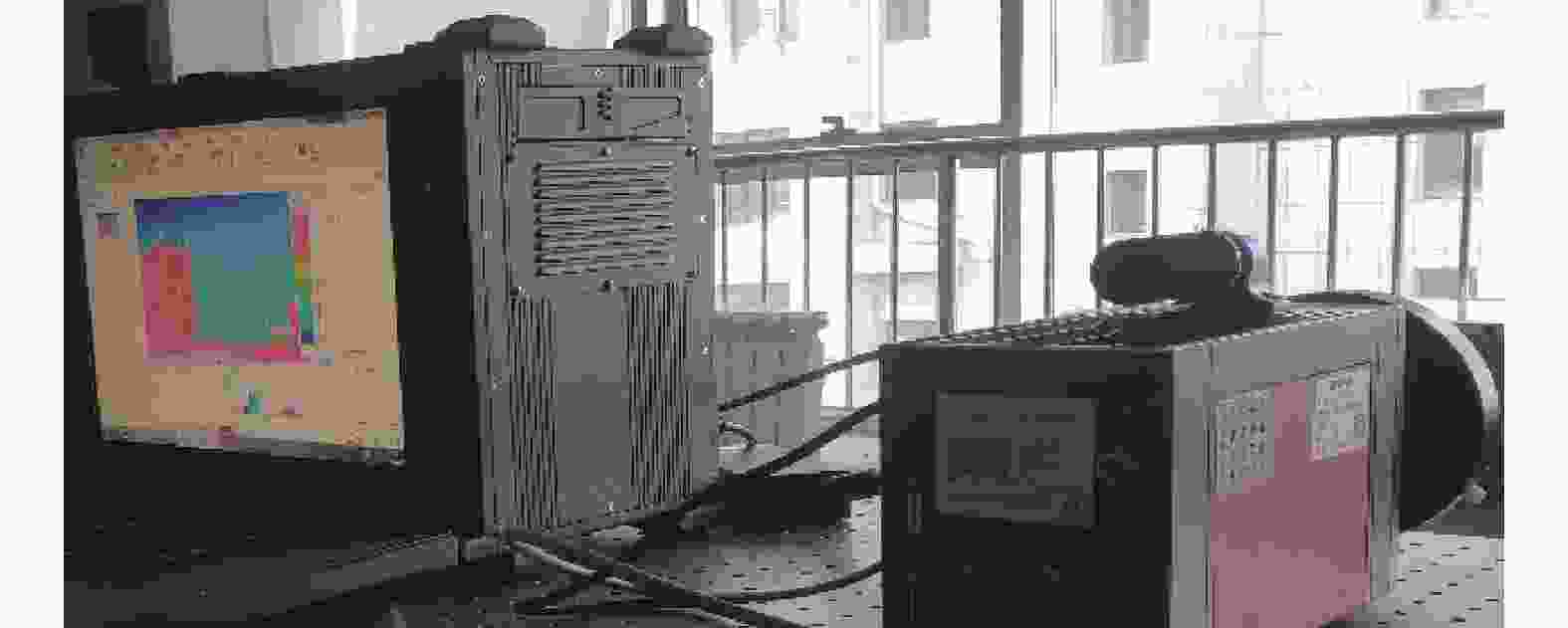
Figure 6. Physical picture of long wave infrared imaging system
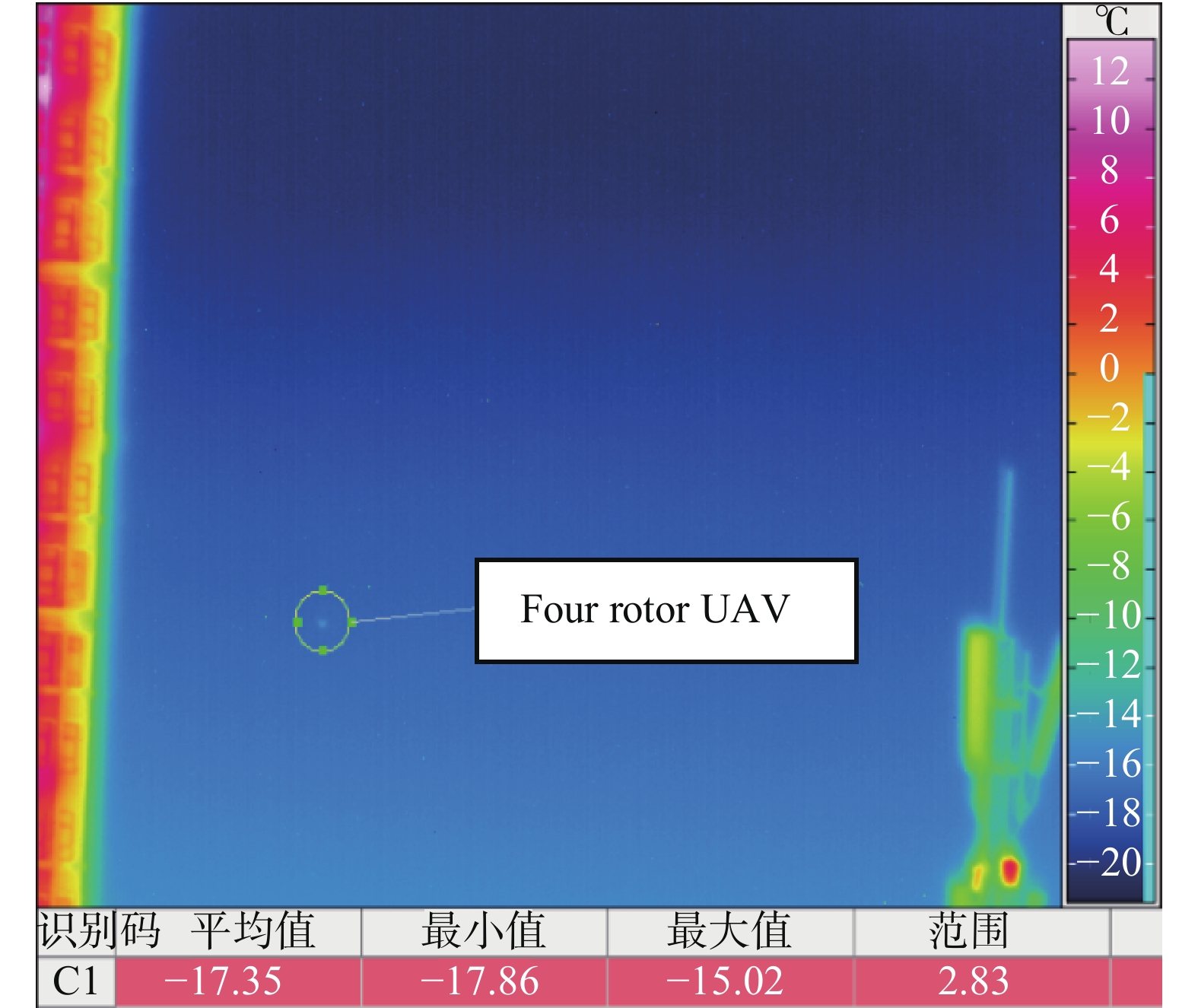
红外热成像实验结果:近距离测试(0.8 km),无人机温度为−15 ℃,背景温度为−17 ℃,在视场内可探测无人机,目标所占像素为5×5,如图7所示。随着作用距离增大(1.5 km)和太阳辐照变弱,长波红外系统也无法探测弱小目标。

Figure 7. Acquired image of long wave infrared system (time 18:00)
-
激光主动照明成像系统的照明激光器波长和功率是关重参数。
激光器波长的选择主要考虑和成像探测器的匹配效果,以及激光在大气传输过程中的衰减。可见光光源易暴露,不适合作为照明光源。1.54 μm波段虽然在大气传输方面有优势,但与成像探测器光谱响应匹配较差。因此,波长在0.76~1.0 μm是比较合理的选择[13]。这类激光光源单色性好、方向性好、高强度,体积小、便于携带,而且波长范围在可见光以外的红外波段,兼顾隐蔽性。鉴于以上分析以及激光波段与图像传感器的匹配,最终选择中心波长808 nm。根据优选的微光探测器,其在808 nm处的量子效率仍然有45%。
根据激光主动照明成像作用距离公式,选定照明激光器功率为20 W。
外场实验时,当主动照明激光覆盖目标区域时,成像系统视场和激光照明视场叠加,无人机图像信号明显增强。时间20:40、环境照度为10−4 lx时,在距离1 km处可观测到无人机(图8)。
Figure 8. Acquired image of laser active illuminated system at 1 km (time 20:40)
-
(1)可见光相机无法胜任低照度背景下的成像工作。
晴朗白天环境,可见光可探测2 km处四旋翼无人机,但由于可见光探测器的响应范围和探测机制,决定了可见光相机无法在环境照度低于10−1 lx时探测弱小目标。
(2)微光夜视与长波红外具备一定低照度成像工作能力,但作用距离有限。
在环境照度为10−3 lx时,微光夜视系统在1 km处已无法探测到无人机。虽然夜视探测器响应灵敏度为10−4 lx,但说明此时已是该系统的探测极限。提高探测器增益,并缩短作用距离到0.5 km时,方可探测(此时环境照度为4×10−4 lx)。开窗放大后四旋翼无人机效果如图9所示,此时无人机所占像素数为6×6,勉强达到识别条件。

Figure 9. Local enlarged image of night vision system at 0.5 km (time 20:40)
而红外长波探测系统,当作用距离增大至1 km或环境照度降至10−3 lx (时间18:40)后,已无法探测四旋翼无人机。主要原因是四旋翼无人机热信息弱,且四旋翼转动过程自带风冷效果,机身与背景温差很小。
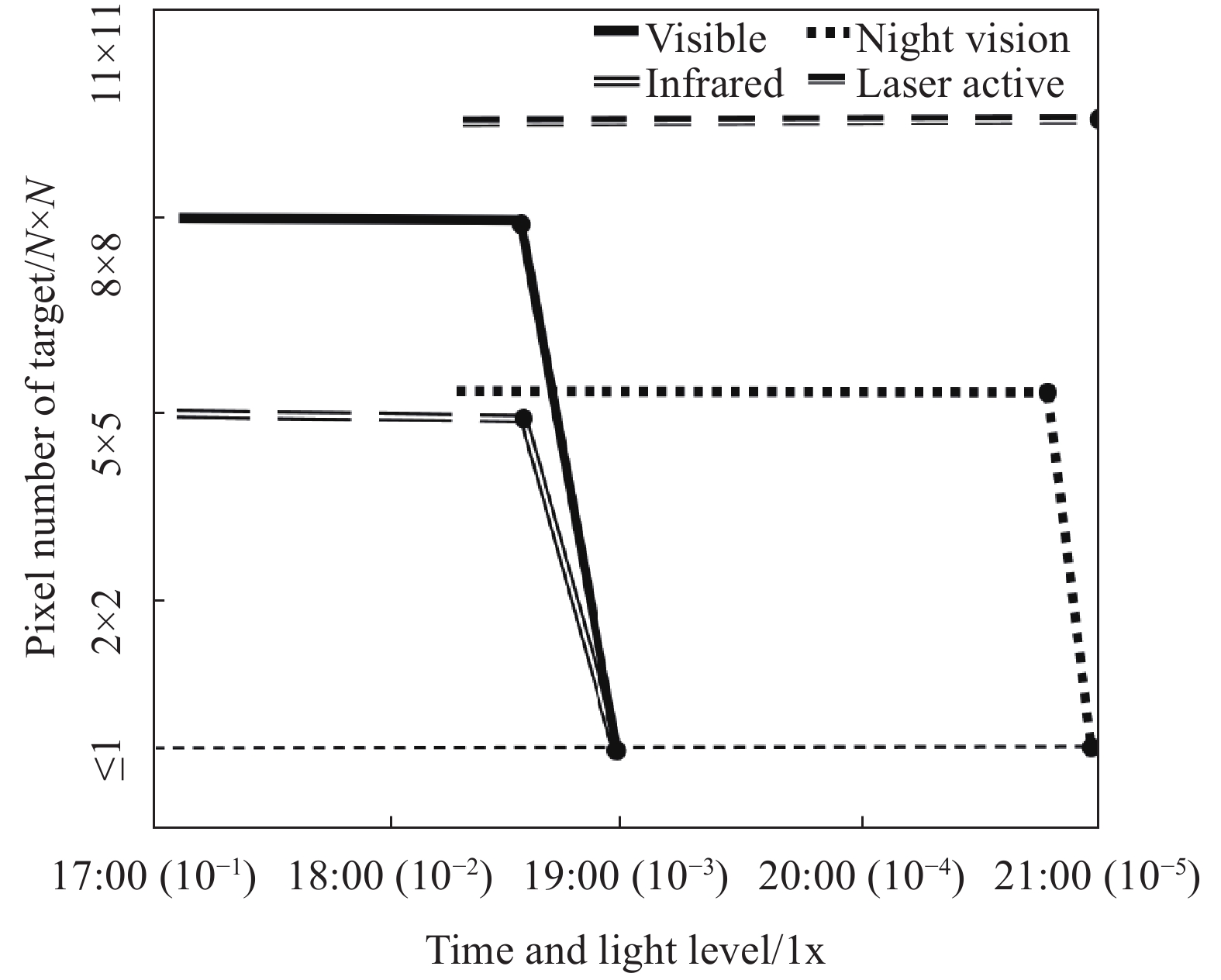
(3)不同成像方式弱小目标所占像素数与环境照度和时间变化关系,如图10所示。经对比可知,微光夜视和激光主动照明结合的成像方式更适用于极低环境照度下弱小目标探测。考虑系统复杂程度和成本,在环境照度低于10−4 lx时选用激光主动照明成像具有更高效费比。
Figure 10. Relationship between number of target pixels and time
(4)不同作用距离条件下,被动成像与主动成像方式成像效果对比。在同等条件下,主动照明成像方式的作用距离可达到被动成像方式的3倍。
在环境照度为5×10−4 lx时(无月星空),微光夜视系统,增加808 nm主动照明激光后,可探测1.6 km处无人机目标。局部放大后四旋翼无人机识别效果如图11所示,目标占像素数为12×9,可识别四旋翼无人机轮廓,说明对比度提高,达到了识别条件。
Figure 11. Local enlarged image of laser active illuminated system at 1.6 km (time 20:50)
-
文中针对以四旋翼无人机为代表的弱小目标在低照度背景下的探测识别问题,开展了多种成像方式的外场实验对比。实验结果表明,可见光相机无法胜任低照度背景下的成像工作,微光夜视与长波红外具备一定低照度成像工作能力,但作用距离有限。而808 nm激光主动照明与微光夜视探测系统配合,可实现对低照度环境下弱小目标的探测和识别。同等条件下,主动照明成像方式的作用距离是被动成像的3倍。
Imaging experiments for weak small target in low-light-level background
doi: 10.3788/IRLA20190569
- Received Date: 2020-03-02
- Rev Recd Date: 2020-04-14
- Publish Date: 2020-09-22
-
Key words:
- weak small target /
- low-light-level background /
- laser active illuminated imaging /
- target detection and recognition
Abstract: Weak small targets, such as unmanned aerial vehicles, have the characteristic of low flight height, small reflection cross-section and weak thermal information, which are difficult to detect and recognize in low-light-level background by a single imaging method. The visible light, low light night vision, long wave infrared and laser active illuminated imaging experiments were carried out, to study the suitable detection and recognition methods by comparing of weak small target images in different low-light-level background. In the field experiment, the target was a small four rotor UAV with the size of 290 mm×290 mm×196 mm, and the environmental illumination was between 10−2 lx and 10−4 lx. The working distance was from 0.5 km to 2 km. The experimental results show that simple visible light system cannot image under 10−2 lx environment illumination; the recognition distance of low-light night vision and long-wave infrared system is only 0.5 km when the environment illumination is 10−4 lx; the active imaging method combining near infrared (central wavelength 808 nm) laser illumination and low-light night vision can increase the recognition distance of weak small targets; under the same condition, the active illuminated imaging working distance is 3 times of the dynamic imaging.






 DownLoad:
DownLoad: