






-
自1961年科学家提出激光雷达的设想,激光雷达技术从最简单的激光测距技术开始,逐步发展了激光跟踪、激光测速、激光扫描成像、面阵成像、激光多普勒成像等技术,进而研发出不同用途的激光雷达,如精密跟踪激光雷达、侦测激光雷达、测绘激光雷达、火控激光雷达、制导激光雷达、气象激光雷达、水下激光雷达、导航激光雷达等。之外,激光雷达在低空飞行直升机/无人机/无人车障碍物规避、化学和生物战剂探测和水下目标探测等军事领域已逐步进入实用阶段,同时,在工业和自然科学领域的应用也日益显现出来。
三维成像激光雷达集光、机、电技术于一体,可快速精确地获得场景的三维信息[1-2]。对比二维光电成像(典型为CCD或CMOS),三维成像激光雷达具有以下显著优势:(1)探测距离远,主动照明,且具备全天候能力;(2)抗电磁干扰能力、背景抑制能力强,不易受环境温度及阳光的影响;(3)抗隐身能力强,能辨识一定的遮蔽物、伪装物;(4)可获得目标的多模信息(如距离、强度、速度等),图像信息量丰富,易于准确实现目标的探测与识别。
目前,国内外对三维成像激光雷达原理与方法、单元关键技术及器件已开展广泛而深入的研究,并取得大量研究成果,可以预见,随着对关键技术与器件研究日趋成熟,激光雷达将成为不可或缺的光学感知手段,不仅可以单独胜任常规的成像侦察任务,也可以配合高分辨的二维图像,通过多模数据融合完成更为复杂的感知任务。
三维成像激光雷达分类方式灵活多样,例如:按照是否有扫描部件可以分为扫描与非扫描方式(对应后续关键单元技术分析);按照搭载的平台可分为星载、机载、车载、船载等(对应后续应用现状分析);按照采用的核心器件可分为基于条纹管、像增强器、雪崩光电二极管(Avalanche Photodiode, APD)等,由于APD具有灵敏度高,工作方式灵活(线性/盖革、单点/点阵/面阵)、价格低廉等优势,已成为激光雷达的主流核心器件之一。因此,文中主要基于APD器件讨论三维成像激光雷达研究现状与关键单元技术。随着计算机性能与微电子工艺的快速发展,一些新型体制(例如:微机电系统(MEMS)扫描、光学相控阵、鬼成像)相继引入激光雷达,从而提高三维成像性能。
-
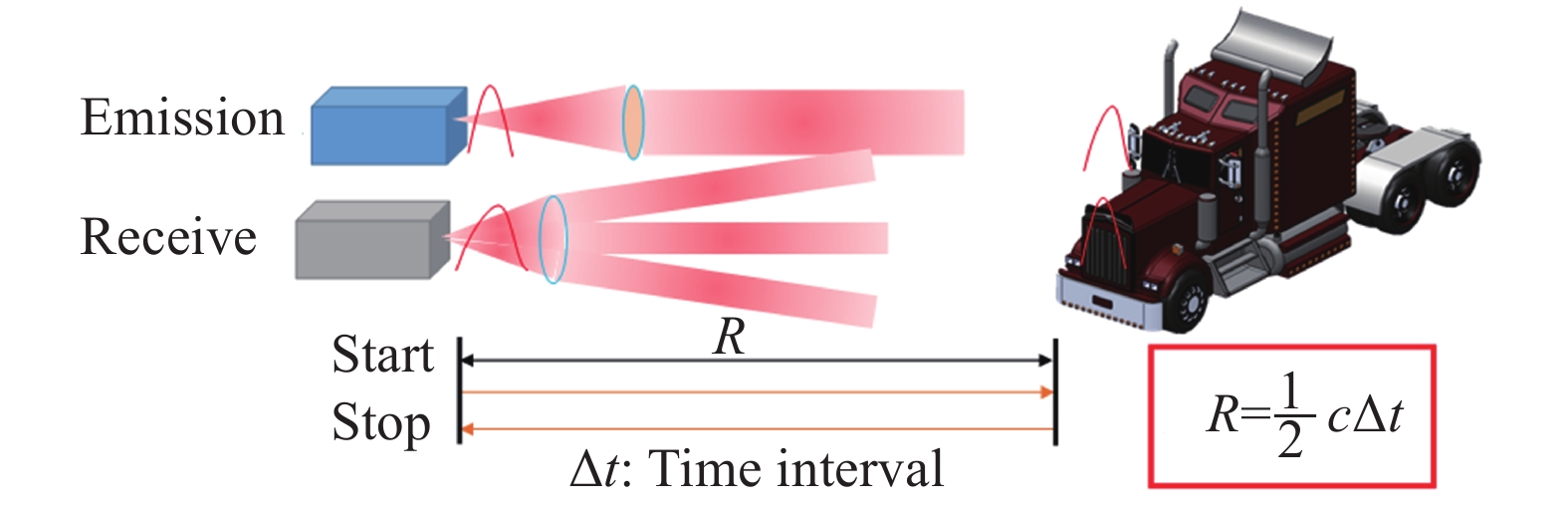
现阶段APD三维成像激光雷达主要以脉冲激光测距[3]为基础,如图1所示,由发射系统发射一束窄脉冲照射目标,经目标反射或散射的回波经过接收透镜照射至探测器,通过统计发射与接收时刻的飞行时间获得目标距离。在测距基础上,通过扫描或面阵接收方式对物空间进行三维信息获取(强度+距离)。其中,扫描方式主要是通过机械/电子等扫描装置(例如:振镜、转镜、双光楔、MEMS、相控阵等)实现对光束偏转,从而获得角度−角度−距离像。面阵接收方式主要是通过泛光照明(即大范围闪光照明)[4]与APD阵列配合,一次性获得所有通道的距离与强度信息,因此,这种方式亦被称为闪光(FLASH)激光雷达,成像效率高,但由于大面阵APD阵列价格昂贵且远距离探测所需激光发射能量高,为了平衡面阵APD与扫描方式的各自优缺点,基于点阵+扫描的方式也得到了诸多研究与应用。下文按照APD三维成像激光雷达的主要组成部分(发射、接收、数据处理),进行单元关键技术分析。
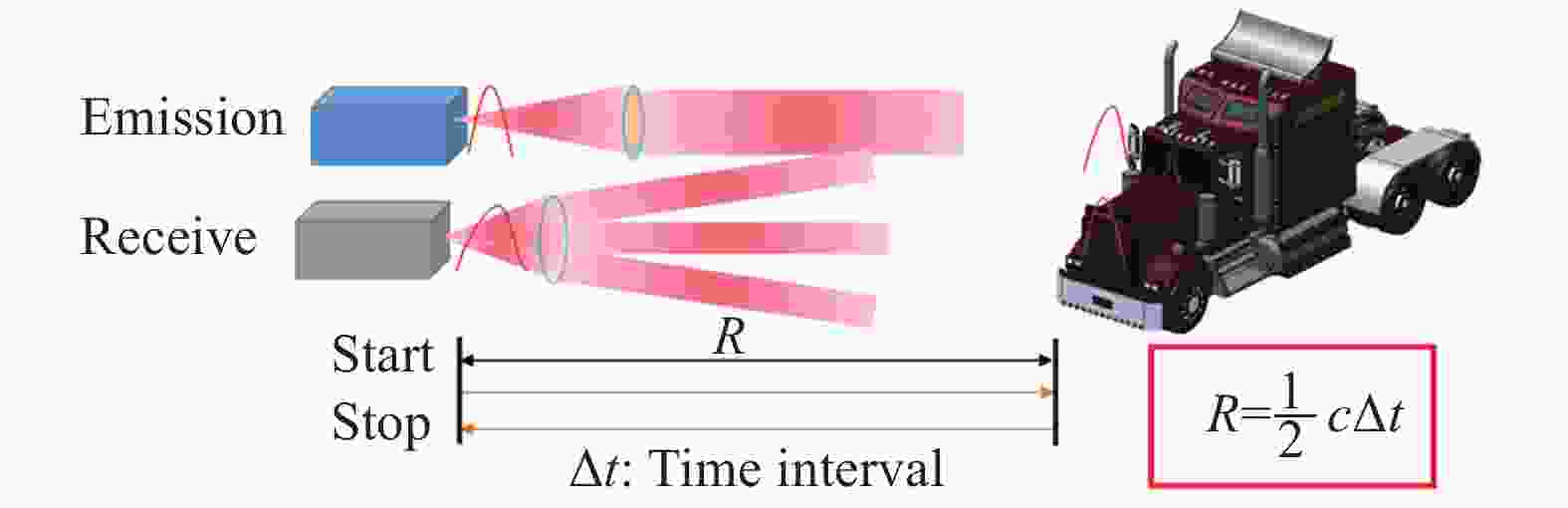
图 1 飞行时间法测距原理
Figure 1. Time-of-flight method ranging principle
-
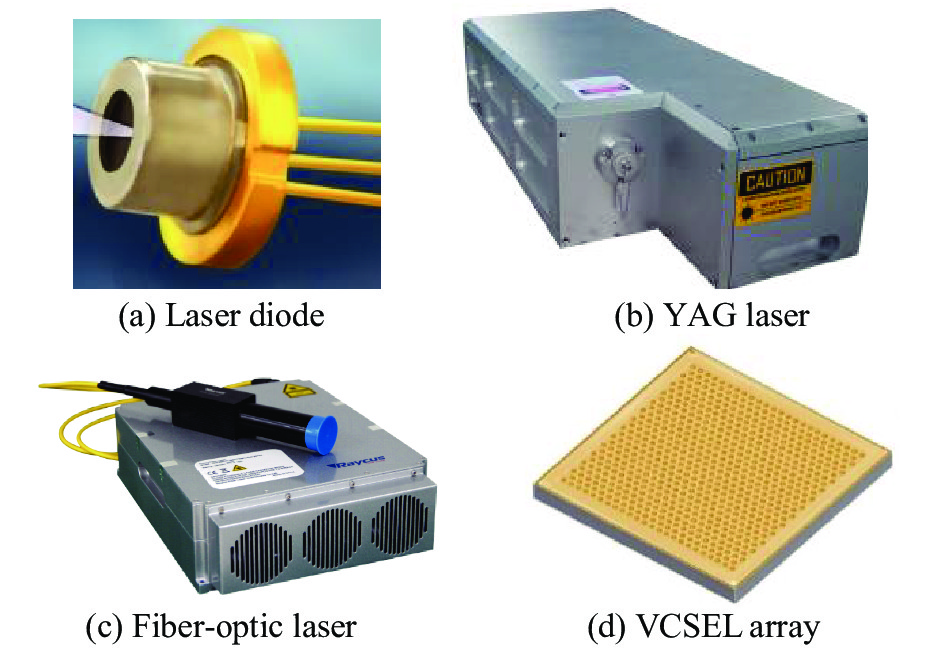
发射单元主要包括激光器、准直扩束系统以及扫描方法。准直扩束系统可以与激光器集成或者根据实际需求通过光学优化设计进行外置。以远距离侦察与无人驾驶应用为例,目前采用较多的为半导体激光器[5]、固体激光器[6]、光纤激光器[7]等,如图2所示。无人驾驶方面,以905 nm半导体激光器为主,原因在于成本低、体积小。远距离侦察方面,以YAG固体激光器(1 064 nm)为主,原因在于脉冲能量较高,可以探测千米以外的目标。光纤激光器具有光束质量优、功率/脉冲能量高、可柔性传输、维护简单等优点[8],尤其是配合一些新体制三维成像,例如:利用相位调制器以及相关算法可以实现光纤相控扫描与高功率合成[9],从而可完成光束的灵巧指向,或者产生高速随机光斑用于计算成像等[10]。
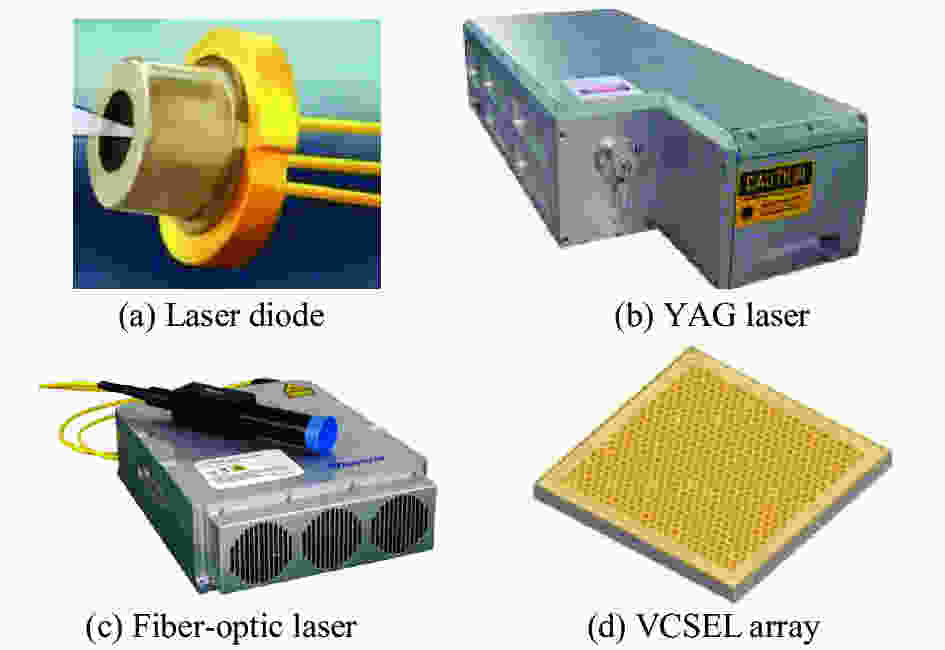
图 2 三维成像激光雷达典型用激光器
Figure 2. Typical laser for 3D imaging laser radar
近年来,以1 550 nm波段为代表的垂直腔面发射激光器(Vertical Cavity Surface Emitting Laser, VCSEL)得到了广泛研究,被认为有望替代905 nm的下一代激光雷达光源,主要原因在于:一方面,1 550 nm相对905 nm穿透性更好,因此在相同峰值功率条件下可以探测更远距离,且对人眼安全性更好;另一方面,VCSEL的光学谐振腔与半导体芯片的衬底垂直,能够实现芯片表面的激光发射,有阈值电流低、稳定单波长工作、易高频调制与阵列集成等优势[11]。
扫描方法包括机械与非机械两类,机械扫描方法技术成熟,但效率较低,包括转镜、光楔、振镜等。国外典型产品包括瑞士Leica、加拿大Optech、美国Trimble、奥地利Riegl等,测距范围可达1 km,精度可达到mm量级。非机械扫描方式包括较多,包括声光[12]、电光[13]、光栅[14]、MEMS[15]、相控阵[16]等。其中,MEMS属于微机械扫描,相控阵为电子扫描,这两种方式在应用现状分析中将进一步阐述。
-
APD是利用PN结在高反偏置电压下产生的雪崩效应进行工作的一种光电探测器。APD具有两种工作模式[2]:线性模式(Linear Mode)和盖革模式(Geiger Mode, GM)。线性模式是指当APD偏置电压低于其击穿电压时,对入射光产生的光电流起到线性放大作用,即电流随入射光强呈线性变化;盖革模式是指当偏置电压接近或高于雪崩电压,APD增益迅速增加,从而使得单光子诱发输出电流饱和,因此,此方式亦被称为单光子计数模式。
APD作为三维成像激光雷达核心器件,典型应用形式包括单点、点阵与面阵三种,具体采用何种方式需要同时兼顾设计需求与成本。从制造难度看,单点方式最为容易,次之是点阵,面阵最难。目前,大面阵(≥128×128) APD阵列对电子制造工艺仍然是个严峻的挑战,主要由于APD的高灵敏度使得电子噪声、探测器之间的串扰难以消除,间距越小,噪声越大。据公开资料,现阶段可实现的大面阵APD阵列为256×256[17],其分辨率远低于目前二维图像传感器。可见,难以获取大面阵APD器件导致非扫描三维成像难以满足高分辨率的成像需求。因此,国内外对面阵APD也开展了诸多研究。例如:美国Raytheon公司长期致力于高灵敏APD阵列芯片的研究工作,该公司在美国国家航空和宇宙航行局(NASA)、美国空军实验室(AFRL)、海军航空兵武器系统部(NAVAIR)等国防部门的资助下,先后研制出一系列高灵敏度APD阵列,包括单点组成阵列式APD阵列,大面阵APD阵列(256×256),还包括不同衬底材料的APD阵列,例如:硅(Si)APD阵列,碲镉汞(CdHgTe)APD阵列,其中,碲镉汞(CdHgTe) APD能够获得更高的雪崩增益,在相对较高温的状态下,仍然能够保持增益对光强的线性响应,使得系统能同时得到强度像与距离像,更有利于获得目标的更多信息。我国重庆光电技术研究所相关研究人员研制了由InGaAs/InP雪崩光电二极管阵列组成的时间计数型CMOS读出电路,先后突破了8×8、32×32阵列规格盖革模式APD阵列,在盖革模式下具有单光子探测灵敏度,时间计数型CMOS读出电路在每个单元获取光子飞行时间,实现ns级时间分辨率,并完成淬灭功能,单元时间抖动为332 ps,串扰累积概率为15.6%。哈尔滨工业大学在国内自研InGaAs材料的32×32像元GM-APD基础上,搭建了一套1 570 nm激光主动成像实验平台[18],在单脉冲能量2 mJ条件下,获得了外场3.9 km目标的轮廓像,在720 m处能获得目标的清晰表面结构距离像。西南技术物理研究所也研制32×32盖革APD阵列[19],实现了远距离三维成像。总体来看,推进大面阵APD阵列技术,有利于实现快速三维成像,提高激光雷达的集成性。
-
基于激光雷达点云的算法是实现三维重构、场景理解、目标特征获取的重要研究内容。相比较传统二维成像方式,增加了距离信息的点云重构使得场景信息更为丰富,尤其是一些复杂场景下的目标获取,例如:丛林、叶簇等伪装、遮挡物下的目标获取。目前点云算法单元主要包括点云的滤波、特征提取与分割。由于点云数据中通常存在噪声点以及冗余信息,需要对噪声点云及冗余进行过滤,目前点云滤波技术主流方法包括有直通滤波、体素滤波、统计滤波和半径滤波等,如表1所示。
表 1 主流滤波效果对比
Table 1. Mainstream filter effect comparison
Filter name Principle Features Pass-through filtering For point cloud data with certain spatial characteristics in the spatial distribution, determine the range of the point cloud in the x, y, and z axis directions, and then filter the threshold to remove the different range points The speed is fast, but the filtering is not accurate enough, which is often a rough process in the filtering process Voxel filtering A voxel is a small space in three dimensions. Create a voxel grid on the input point cloud data, and then in each voxel, all existing points will be approximated by their centroids The number of point clouds is reduced without destroying the geometry of the point cloud itself Statistical filtering Perform noise filtering based on point cloud density. By calculating the average distance from each point to its nearest neighbor, the Gaussian distribution of all points in the point cloud is obtained, and then a distance threshold can be determined according to the mean and variance to filter outliers. The filtering effect is better than straight-through filtering, which can accurately filter out sparse outliers Bilateral filtering Given a threshold, calculate the number of point clouds under each radius. When the number is greater than the given threshold, keep it, otherwise filter out Can filter out internal noise more quickly than statistical filtering 点云的特征指点云数据中能够表示实体几何特性或纹理特征的点的集合。特征提取主要包括局部特征和全局特征。点云分割是将杂乱无章的点云数据分割成若干个互不相交的子集,并将每一个子集的数据给一定的语义信息。点云分割主要包含:(1) 基于边缘的分割方法:通过检测点云数据中隐藏的边缘信息得到分割区域,通常用来描述物体的形状特性。Bhanu等人[20]在1896年首先提出通过计算梯度信息,检测单位法向量的方向变化来检测边缘;KeYinglin等人[21]将点云划分为网格,检测边缘网格并且分割相应的点云。(2) 基于面积的分割算法:基于面积分割算法以点云曲面作为起点,通过相似度度量,对各个点云曲面周围的离散点云进行分组,进而将种子逐步扩展到更大的曲面[22]。(3) 基于模型的点云分割:利用原始几何形态的数学模型作为先验知识进行分割,使具有相同模型的点云数据被分割到同一区域。Fischer[23]提出随机抽样一致性算法用于检测直线,圆等特征。(4) 基于图的分割算法:利用点云数据构造图的结构进行分割,将分割问题转换为概率推理模型。WR Green等人[24]将空间、几何和外观特征结合起来作为图边缘的权重计算方法,对室内场景点云进行分割。Yang等人[25]使用图模型方法进行区域融合,通过最小化能量函数得到边界清晰的RGB-D图像分割结果。
总的来说,基于三维点云算法方面的研究从滤波、特征提取与分割方面已经取得了一定进展,并且针对简单目标的理解已经比较成熟,但是针对室外大场景下稠密激光点云的场景理解(比如在有伪装或者遮挡情况下)还有许多待解决的问题。
-
三维成像分类方式多样化,若以载荷应用需求分类,可以分为星载、车载、机载、船载、弹载等方式。其中,受限于体积与成像效率,弹载三维成像激光雷达尚处于刚起步阶段,离实用化仍有较长距离。船载激光雷达已有开始应用,但目前多是将车载激光雷达移植在船载平台,此种方式对于水面上的3D重构与目标识别类似车载情况对待,而对于水下一体化探测的三维成像激光雷达还有待进一步研究。星载扫描成像激光雷达主要用于空间交会对接、飞行器导航着陆以及星载对地三维成像等。由于星载距离远(百公里),因此工作方式多以扫描为主。机载激光雷达已有较为成熟应用,例如:奥地利的Riegl、加拿大的Optech、瑞士的Leica,国内的中海达、北科天汇等产品。随着大面阵APD阵列工艺日趋完善,扫描与凝视相结合的成像方式也得到了广泛应用,在植被遮挡目标探测下,2003年,美国国防高级研究计划局(DARPA)和美国陆军夜视和电子传感器管理局(NVESD)共同研制的一种集成、轻型的用于无人机平台的Jigsaw激光三维成像雷达系统,旨在通过更高分辨率三维成像发现、识别隐藏于植被或伪装的目标。
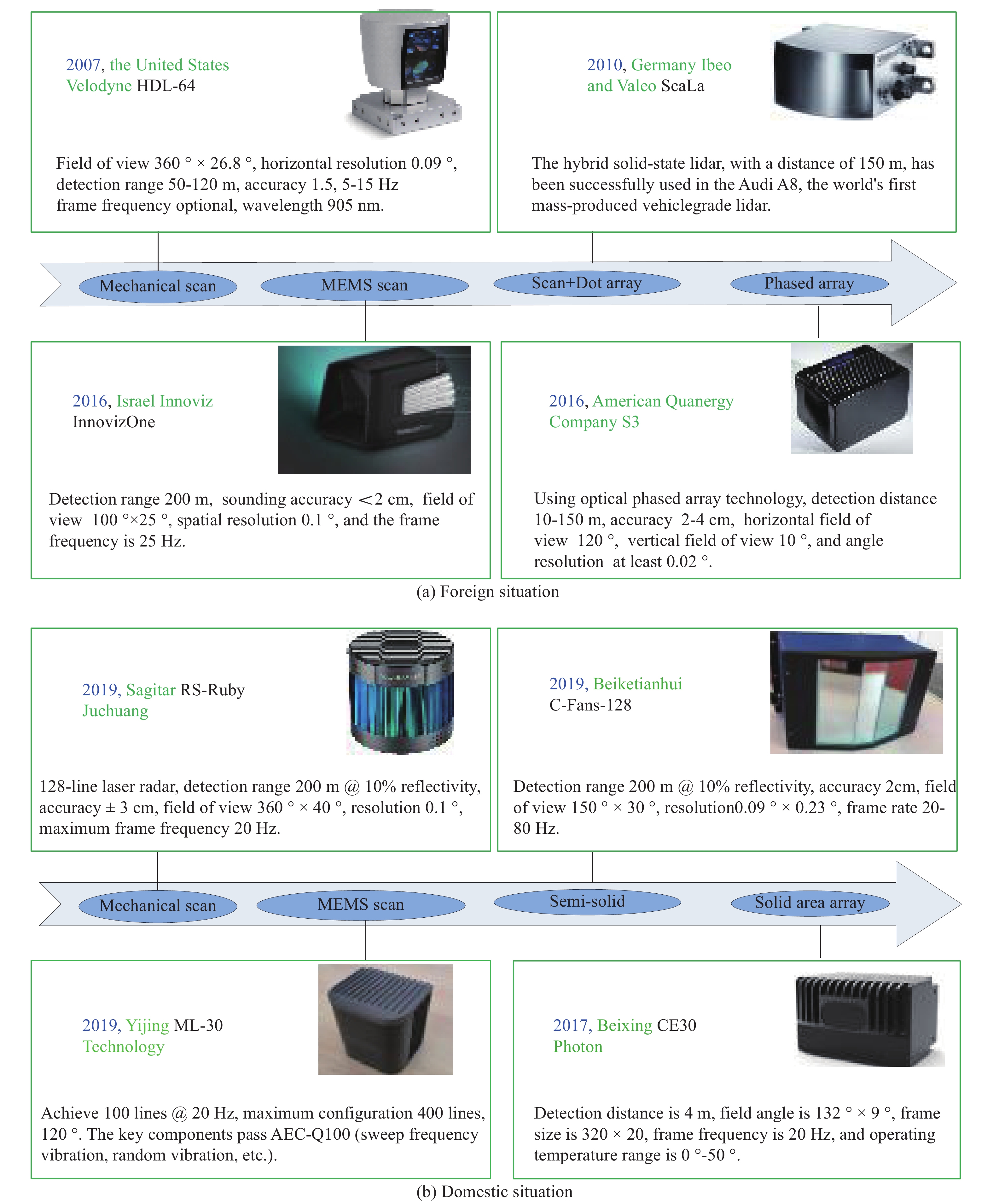
受大数据、互联网、人工智能驱动的影响,车载激光雷达[26]是自动驾驶的研究热点,下文以车载激光雷达应用现状为例进行讨论,按照扫描与非扫描方式,国内外车载激光雷达的研究现状[27]如图3所示,可以看到,国外已研制出车规级激光雷达(例如:法雷奥),而我国尚未形成可批量应用于车载的激光雷达;从技术指标,我国与国外持平,均已有突破百线的激光雷达,既有适合放置于车顶的周视三维成像激光雷达,也有适合嵌入车身的前置成像激光雷达;从成像体制看,MEMS与相控阵被认为目前扫描式激光雷达中具有良好前景的两种成像方式,国内外均在研究。MEMS扫描[28]:国内外均有基于MEMS的高分辨三维成像研发能力,且均已突破百线以上分辨率,实时性可达到20 Hz以上。相控阵扫描:国外已研制出光波导的相控阵扫描激光雷达[29],并已有实物样机,我国尚有一定差距,因此,对于新体制的三维成像研究也是提高三维成像综合性能的必由之路。对比MEMS与相控阵两种扫描成像体制(表2),一方面,尽管相控阵无任何惯性,但因现有电子工艺技术难以达到相邻发射单元间距小于光波长之半,从而导致光束合成效率低、旁瓣栅瓣严重;另一方面,MEMS仍属于机械扫描,其出现是代替传统的机械同轴多光束扫描成像激光雷达,尽管具有惯性小、摆幅大、频响高的优点,但因振动、高低温、冲击等高强度环境的影响,器件集成仍是需要进一步解决的技术难点。

图 3 国内外车载三维成像激光雷达典型产品对比图
Figure 3. Comparison of typical products of vehicle three-dimensional imaging lidar at domestic and foreign
表 2 MEMS与OPA成像激光雷达对比
Table 2. Comparison of MEMS and OPA imaging laser radar
MEMS Phased array Core principle Micromechanical scanning Transmitter unit array + phase control Advantage Small size, light weight, large swing, small inertia Small size, light weight, no inertia, large swing (depending on unit spacing) Disadvantages Small target surface and low damage threshold Damage threshold is high, can form high power Craft difficulty Relatively easy Difficult (unit spacing is less than half of the optical wavelength) Cost Lower Reduce costs after batching Current research situation Relatively mature Immature -
通过上述分析,基于APD器件的三维成像方法正朝着多元化发展,其核心是面向高分辨、大视场、高精度、实时化3D成像。下面讨论两种适用于APD器件的新型3D成像方法,分别是异构变分辨率三维成像方法与鬼成像方法,后者也被称为关联成像或者单像素成像。
-
传统激光三维成像方法,无论是扫描、还是非扫描成像,成像速率、分辨率、大视场、测距精度始终解决现有三维成像技术的矛盾。比如:对于扫描式成像而言,通过对同一视场多次重复扫描能够提高测距精度,但会降低成像速率,尤其是大视场扫描;面阵式成像虽然能够获得较高的成像速率,但目前难以加工出大面阵APD阵列,同时,对于面阵成像而言,由于探测器之间的相互串扰,导致信噪比不高,从而其测距精度与扫描式的相比仍有一定差距。
人眼视网膜的变分辨成像为此矛盾提供一种解决途径,人眼视网膜的感光细胞分布非均匀[30],图4(a)为视网膜感光细胞呈非均匀分布,中央感光细胞密集,由内向外逐渐减小,这种非均匀特点使得人眼在中央凹具有更高的分辨率,而周边分辨率较低,因此人眼既能高分辨率凝视观察,也能感知中央凹周边的景物。图4(b)为对数极坐标映射,具有外围数据压缩的功能,同时还具有抗尺度与旋转改变的特点。基于上述原因,提出具有自适应特点的异构变分辨率三维成像方法[31],更进一步,由于三维成像激光雷达作为环境感知器件,目的是为了实现识别、跟踪、避障等功能,因此,对于整个视场并非要全部高分辨成像,而是应该具有一定的自适应性[32],对于目标区域进行高分辨成像,而对于背景部分则不需要进行高分辨成像。
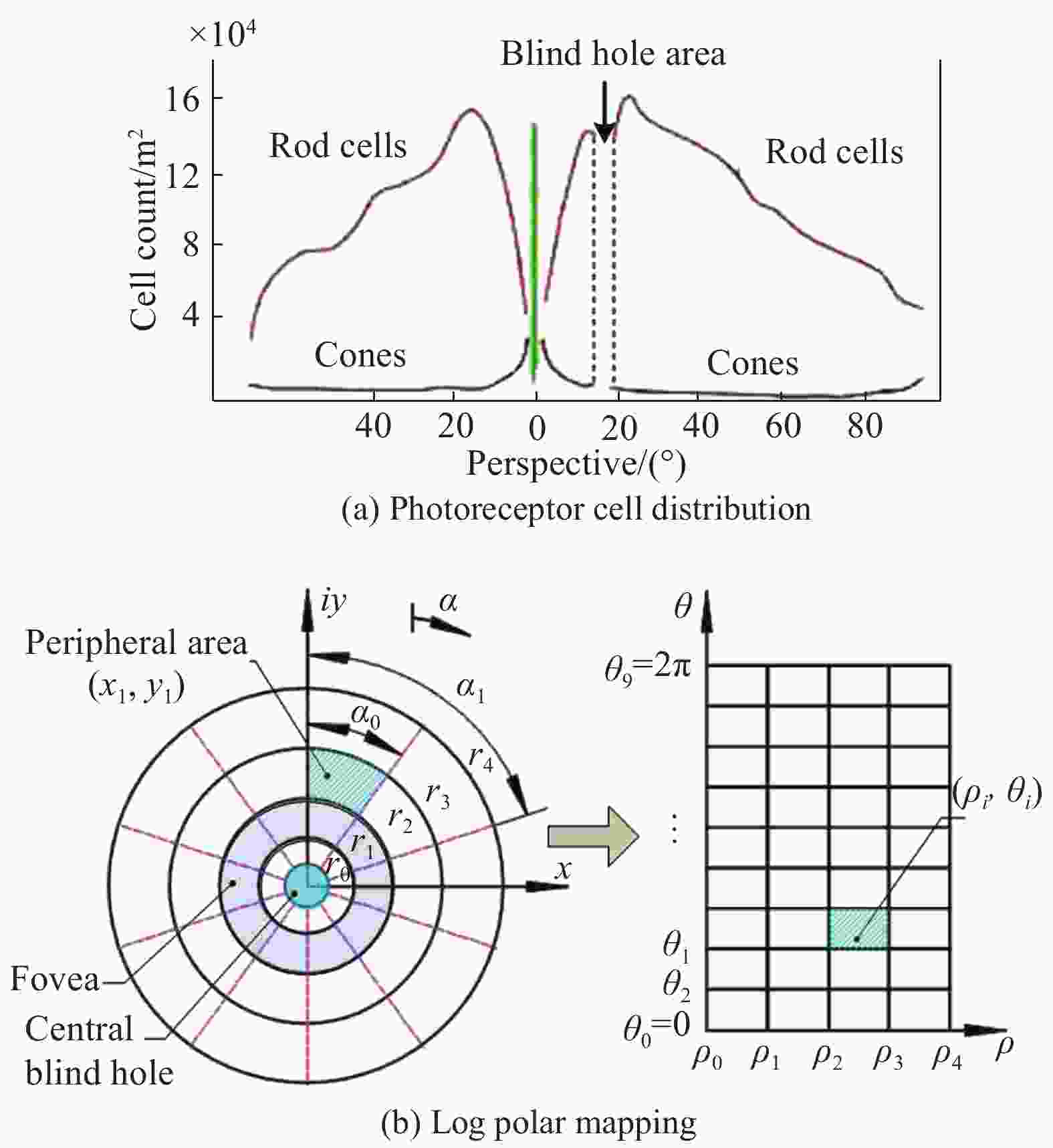
图 4 仿人眼视网膜原理
Figure 4. Human eye retina principle
对于仿生视网膜成像,在二维传感器方面已有相关研究,例如:纽约神经系统科学实验室(Neuroscience Lab)的Eric L. Schwartz提出了笛卡尔坐标与对数坐标映射模型之后,该实验室便开始着手研制具有类人眼功能试验系统。意大利热亚大学LAR-lab中的Massimo Tistarelli, Giulio Sandini,比利时IMEC (Interuniversity Micro-Electronics Center)的F.Pardo都紧随其后对此方面进行了研究,意大利的LAR-lab和欧洲校际微电子中心(IMC)联合研制了类视网膜的CMOS探测器,以及基于此芯片的机器视觉系统。通过硬件实现仿人眼视觉图像传感器的方式主要是基于CCD(charge coupled device)[33-35]或CMOS (complementary metal oxide semiconductor)工艺。我国在二维与三维异构变分辨成像方面均有突破,比如:西北工业大学李言俊团队开展了基于仿生视觉机理的相关图像算法研究[36],北京航空航天大学陈伟海等人,提出利用DSP+FPGA的硬件平台构架,对环境进行分布扫描,在线规划下一步的扫描规律,以减少无用信息获取[37]。南京理工大学陈钱团队利用背景与目标的非连续性特点,提出了自适应的单光子计数三维成像激光雷达[38],使得数据采样时间提高了85%。北京理工大学郝群、曹峰梅等人也开发了基于仿生视觉的CMOS非均匀图像传感器[39](图5(a))以及三维成像系统[40](图5(b)),不仅从理论与实验上证明了仿人眼传感器除了具有冗余数据压缩与旋转尺度不变的特性外,还有径向去模糊优点,这使其在高速运动成像中具有极好的优势[41]。

图 5 仿生变分辨成像系统
Figure 5. Biomimetic variable resolution imaging system
-
鬼成像,也称为关联成像或单像素成像,是一种在量子水平上发展出的新光学成像和量子信息并行处理技术[42]。传统光学成像是通过记录辐射场的光强分布获取目标图像信息的方法,无论是二维被动成像还是三维主动成像,成像光路均会直接与目标接触,如图6(a)、(c)所示,目标信息会直接被阵列相机或APD阵列感知。而鬼成像不同于上述成像方式,其特别之处在于鬼成像的“非定域性”[43],即可以在与物体不相接触的光路中获得物体像,如图6(b)、(d)所示,分别为经典鬼成像与计算鬼成像典型光路。经典鬼成像通过旋转毛玻璃产生随机涨落光场,经过分束镜后一部分被高分辨图像传感器采样,即参考臂,另外一部分照射目标,由目标反射或散射的光被桶探测器接收,即探测臂,通过关联运算可以反演出目标二维或三维图像。相比较经典鬼成像,计算鬼成像结构更为简单,通过数字微镜器件(DMD)产生随机光场,从而代替参考臂的功能,如图6(d)所示。

图 6 传统二维成像、三维成像与鬼成像对比
Figure 6. Comparison of traditional two-dimensional imaging, three-dimensional imaging and ghost imaging
从鬼成像原理可以看到,其核心在于参考臂的随机光场与桶探测器获取的光强关联,避免了散射效应对传统光学物象关系的影响。因此,该方法更适用于散射介质后成像,并且该体制可实现无光学透镜进行成像[44],从而突破了瑞利衍射分辨率极限,利用此特点,2014年,美国陆军研究人员对2.33 km外的目标进行成像实验,在低光照和气流紊乱情况下,获得了目标清晰的目标图像。传统鬼成像方法的目标获取维度典型为2D图像,为获取3D信息,2013年,Sun等人[45]提出采用4个桶探测器重构三维关联成像的方法,此种方法能够获得物体表面精细结构,但不适用于远距离三维重构,且成像速率难以满足实时需求。我国中国科学院上海光学精密机械研究所韩申生团队研发了基于稀疏和冗余表象的鬼成像雷达[46],提高了鬼成像的实用性。北京航空航天大学孙鸣捷团队采用四象限探测器并行时空信息处理,相比传统单像素成像提高了4倍效率[47],英国格拉斯哥大学Phillips等人[48]提出利用人眼视网膜变分辨成像特点,实现变分辨率成像,在相同分辨率下,通过DMD生成疏密程度非均匀的二维随机散斑光场,视场中央模拟人眼中央凹的高分辨率成像,周边区域模拟人眼外围低分辨率成像,以此适应不同的场景。
目前面向实际工程应用的鬼成像激光三维雷达处在快速发展期[49],尽管已有研究机构报道了原理样机,但离工程样机仍有一定距离,主要困难在于:(1)高分辨率与实时性难以兼顾。根据重构算法不同,鬼成像主要分为光场二阶强度关联与基于压缩感知重构两大类。在高分辨率、实时性成像场景下,针对相同的成像质量需求,基于二阶强度关联的鬼成像需要大量采样数据,采样时间较长,同时高分辨率需求会导致计算数据量和重构时间的增加,从而限制其实时性;而基于压缩感知的鬼成像,可实现低于奈奎斯特采样定律采样,采样时间大幅缩短,但由于其重构算法复杂,且当重构分辨率较高时,重构环节计算量大幅上升,从而导致其实际重构时间更长。根据光强度的空间二阶相关理论可知,热光辐射的最大相关值为50%,因此,图像的对比度调制最大值仅为33%[50]。所以想要获得较好的成像质量,鬼成像需要进行多次测量,积累充足的釆样数据才可高质量完成关联成像,在三维鬼成像重构中同样存在像质与实时性难以兼顾的问题[51]。(2)低信噪比导致切片位置精度低下,从而直接影响三维鬼成像重构精度低。采用回波时域分割的二维鬼成像是针对回波固定位置的多次光强统计,因此,由于回波波形展宽以及远距离成像时回波信号微弱,导致信噪比降低,易出现多个切片的二维鬼成像在时域上出现混叠,降低重构精度。因此,如何实现回波的高精度切片是实现三维重构的主要问题。
-
目前,三维成像激光雷达正朝着大视场、高分辨、高精度、实时性、模块化、智能化的方向发展。文中在分析三维成像激光雷达研究现状的基础上,重点讨论了基于APD器件的三维成像激光雷达单元关键技术。以车载环境感知为例讨论了三维成像激光雷达的军民应用所面临的难点、痛点问题。阐述了异构变分辨三维成像与鬼成像体制新型三维成像方法,为进一步开展高性能三维成像激光雷达奠定基础。
Research progress of APD three-dimensional imaging lidar
-
摘要: 三维成像激光雷达因获取信息丰富、抗干扰能力强、分辨率高等优势已广泛应用于地貌勘测、自动驾驶、智能交通、视觉跟踪等国防与民用领域。随着雪崩光电二极管(APD)探测器件的发展与三维成像体制的多样化(例如:微机电系统扫描、相控阵、闪光等),激光雷达性能较早期已得到大幅提升。立足于军民领域对激光雷达的新需求,迫切需求新方法、新体制进一步提升三维成像的综合性能。首先从APD三维成像激光雷达的发射单元、接收单元、算法单元(数据处理单元)三方面关键技术展开分析。然后,以载荷应用需求对三维成像激光雷达进行了分类阐述与讨论,重点以车载环境感知为例深入讨论了现有激光雷达的应用现状与军民应用所面临的难点问题。基于APD器件的三维成像方法多元化发展,讨论了两种适用于APD器件的新型三维成像方法(异构变分辨率与鬼成像)。最后,在分析三维成像激光雷达研究现状的基础上,总结了三维成像激光雷达正朝着大视场、高分辨、高精度、实时性、模块化、智能化的方向发展,为进一步研究高性能三维成像激光雷达奠定基础。Abstract: Due to the advantages of rich information, strong anti-interference ability and high resolution, three-dimensional (3D) imaging lidar has been widely used in defense and civil fields, such as geomorphology surveys, autopilot, smart transportation and visual tracking. With the development of avalanche photodiode detector (APD) and the multiplicities of 3D lidar (e.g., MEMS, optical phased array, flash, etc.), the performances of lidar has been greatly improved compared with that of initial 3D systems. According to the new requirements on 3D lidar for the military and civilian fields, novel methods and mechanisms were proposed to improve comprehensive performances of 3D imaging. First of all, the three key technologies of APD-based 3D imaging lidar were analyzed, including the transmitting unit, the receiving unit, and the algorithm unit (data processing unit). Then, 3D imaging lidar was classified and discussed according to the different applications for loading. Among them, 3D imaging lidar based on unmanned vehicle was selected as the typical example for illustrating the application status and the difficulties faced with military and civilian applications. Based on the diversified development of 3D imaging methods, two novel 3D imaging methods (heterogeneous resolution and ghost imaging) suitable for APD devices were discussed. Finally, based on the analysis of the research status of 3D imaging lidar, it is concluded that 3D imaging lidar is developing towards the large field of view, high resolution, high precision, real-time, modularity and intelligence, which paves the way for developing high performances of 3D imaging lidar.
-
Key words:
- three-dimensional imaging /
- lidar /
- APD /
- identification /
- subdivision
-
图 3 国内外车载三维成像激光雷达典型产品对比图
Figure 3. Comparison of typical products of vehicle three-dimensional imaging lidar at domestic and foreign
图 6 传统二维成像、三维成像与鬼成像对比
Figure 6. Comparison of traditional two-dimensional imaging, three-dimensional imaging and ghost imaging
表 1 主流滤波效果对比
Table 1. Mainstream filter effect comparison
Filter name Principle Features Pass-through filtering For point cloud data with certain spatial characteristics in the spatial distribution, determine the range of the point cloud in the x, y, and z axis directions, and then filter the threshold to remove the different range points The speed is fast, but the filtering is not accurate enough, which is often a rough process in the filtering process Voxel filtering A voxel is a small space in three dimensions. Create a voxel grid on the input point cloud data, and then in each voxel, all existing points will be approximated by their centroids The number of point clouds is reduced without destroying the geometry of the point cloud itself Statistical filtering Perform noise filtering based on point cloud density. By calculating the average distance from each point to its nearest neighbor, the Gaussian distribution of all points in the point cloud is obtained, and then a distance threshold can be determined according to the mean and variance to filter outliers. The filtering effect is better than straight-through filtering, which can accurately filter out sparse outliers Bilateral filtering Given a threshold, calculate the number of point clouds under each radius. When the number is greater than the given threshold, keep it, otherwise filter out Can filter out internal noise more quickly than statistical filtering  下载: 导出CSV
下载: 导出CSV
表 2 MEMS与OPA成像激光雷达对比
Table 2. Comparison of MEMS and OPA imaging laser radar
MEMS Phased array Core principle Micromechanical scanning Transmitter unit array + phase control Advantage Small size, light weight, large swing, small inertia Small size, light weight, no inertia, large swing (depending on unit spacing) Disadvantages Small target surface and low damage threshold Damage threshold is high, can form high power Craft difficulty Relatively easy Difficult (unit spacing is less than half of the optical wavelength) Cost Lower Reduce costs after batching Current research situation Relatively mature Immature
下载: 导出CSV
-
[1] 戴永江. 激光雷达原理[M]. 北京: 国防工业出版社, 2002. [2] Richmond R D, Cain S C. Direct-Detection LADAR Systems[M]. Washington: SPIE, 2010. [3] 施智勇, 潘晓声, 张谦. 利用延时法进行高精度脉冲激光测距[J]. 光学 精密工程, 2014, 22(2): 252-258. doi: 10.3788/OPE.20142202.0252 Shi Zhiyong, Pan Xiaosheng, Zhang Qian, et al. High-precision pulsed laser measuring distance by time delay method [J]. Optics and Precision Engineering, 2014, 22(2): 252-258. (in Chinese) doi: 10.3788/OPE.20142202.0252 [4] Aull B F, Loomis A H, Young D J, et al. Three-dimensional imaging with arrays of Geiger-mode avalanche photodiodes[C] //Proceedings of SPIE-The International Society for Optical Engineering, 2003, 6014: 467-468. [5] 杜悦宁, 陈超, 秦莉, 等. 硅光子芯片外腔窄线宽半导体激光器[J]. 中国光学, 2019, 12(2): 54-66. Du Yuening, Chen Chao, Qin Li, et al. Narrow linewidth external cavity semiconductor laser based on silicon photonic chip [J]. Chinese Optics, 2019, 12(2): 54-66. (in Chinese) [6] 栾昆鹏, 于力, 沈炎龙, 等. 外腔调谐的全固态Cr: LiSAF激光器[J]. 光学 精密工程, 2015, 23(12): 3316-3321. doi: 10.3788/OPE.20152312.3316 Luan Kunpeng, Yu Li, Shen Yanlong, et al. Widely tunable all-solid-state Cr: LiSAF lasers with external cavities [J]. Optics and Precision Engineering, 2015, 23(12): 3316-3321. (in Chinese) doi: 10.3788/OPE.20152312.3316 [7] 石俊凯, 王国名, 纪荣祎, 等. 结构紧凑的双波长连续波掺铒光纤激光器[J]. 中国光学, 2019, 12(4): 810-819. doi: 10.3788/co.20191204.0810 Shi Junkai, Wang Guoming, Ji Rongyi, et al. Compact dual-wavelength continuous-wave Er-doped fiber laser [J]. Chinese Optics, 2019, 12(4): 810-819. (in Chinese) doi: 10.3788/co.20191204.0810 [8] 史伟, 房强, 李锦辉, 等. 激光雷达用高性能光纤激光器[J]. 红外与激光工程, 2017, 46(8): 0802001. doi: 10.3788/IRLA201746.0802001 Shi Wei, Fang Qiang, Li Jinhui, et al. High performance fiber laser for laser radar [J]. Infrared and Laser Engineering, 2017, 46(8): 0802001. (in Chinese) doi: 10.3788/IRLA201746.0802001 [9] 王小林, 周朴, 粟荣涛, 等. 高功率光纤激光相干合成的现状、趋势与挑战[J]. 中国激光, 2017, 44(2): 0201001. doi: 10.3788/CJL201744.0201001 Wang Xiaolin, Zhou Pu, Su Rongtao, et al. Current status, trends and challenges of high power fiber laser coherent synthesis [J]. Chinese Journal of Lasers, 2017, 44(2): 0201001. (in Chinese) doi: 10.3788/CJL201744.0201001 [10] Wang Han, Wang Chenglong, Gong Wenlin. Ghost imaging via sparse structured illumination source [J]. Optics Express, 2018, 26(4): 4183. doi: 10.1364/OE.26.004183 [11] 王阳, 崔碧峰, 房天啸. 垂直腔面发射激光器(VCSEL)的研究进展[J]. 光电子, 2017, 7(2): 50-57. doi: 10.12677/OE.2017.72008 Wang Yang, Cui Bifeng, Fang Tianxiao. Research progress of vertical cavity surface emitting laser (VCSEL) [J]. Optoelectronics, 2017, 7(2): 50-57. (in Chinese) doi: 10.12677/OE.2017.72008 [12] Philippov V, Codemard C, Jeong Y, et al. High-energy in-fiber pulse amplification for coherent lidar applications [J]. Optics Letters, 2004, 29(22): 2590-2592. doi: 10.1364/OL.29.002590 [13] Inokuchi H, TanakA H, Ando T. Development of an onboard doppler lidar for flight safety [J]. Journal of Aircraft, 2009, 46(4): 1411-1415. doi: 10.2514/1.41738 [14] Omar M, Gateau J, Ntziachristos V. Raster-scan optoacoustic mesoscopy in the 25–125 MHz range [J]. Optics Letters, 2013, 38(14): 2472-2474. doi: 10.1364/OL.38.002472 [15] Arrasmith C L, Dickensheets D L, Mahadevan-Jansen A. MEMS-based handheld confocal microscope for in-vivo skin imaging [J]. Opt Express, 2010, 18(4): 3805-3819. doi: 10.1364/OE.18.003805 [16] 庄东炜, 韩晓川, 李雨轩, 等. 硅基光电子集成光控相控阵的研究进展[J]. 激光与光电子学进展, 2018, 55(5): 050001. Zhuang Dongwei, Han Xiaochuan, Li Yuxuan, et al. Research progress of silicon-based photoelectron integrated light-controlled phased array [J]. Laser & Optoelectronics Progress, 2018, 55(5): 050001. (in Chinese) [17] Aull B F, Duerr E, Frechette J, et al. Large-format Geiger-mode avalanche photodiode arrays and readout circuits [J]. IEEE Journal of Selected Topics in Quantum Electronics, 2018, 24(2): 1-10. [18] 孙剑峰, 姜鹏, 张秀川, 等. 32×32面阵InGaAsGm-APD激光主动成像实验[J]. 红外与激光工程, 2016, 45(12): 1206006. doi: 10.3788/IRLA201645.1206006 Sun Jianfeng, Jiang Peng, Zhang Xiuchuan, et al. 32×32 area array InGaAsGm-APD laser active imaging experiment [J]. Infrared and Laser Engineering, 2016, 45(12): 1206006. (in Chinese) doi: 10.3788/IRLA201645.1206006 [19] 陈德章, 张华, 冷杰, 等. 基于APD面阵探测器的非扫描激光主动成像雷达[J]. 激光技术, 2017(6): 775-778. Chen Dezhang, Zhang Hua, Leng Jie, et al. Non-scanning laser active imaging radar based on APD area array detector [J]. Laser Technology, 2017(6): 775-778. (in Chinese) [20] Bhanu B L S, Ho C C, et al. Range data processing: Representation of surfaces by edges[C]//Proceedings of the Eighth International Conference on Pattern Recognition IEEE Computer Society Press, 1986: 236-238. [21] Ke Yinglin, Shan Dongri Edge-based segmentation of point cloud data[J]. Journal of Zhejiang University, 2005. [22] BESL P J, Jain R C. Segmentation through variable-order surface fitting [J]. IEEE Trans Pattern Analysis & Machine Intelligence, 1988, 10(2): 167-192. [23] Fischler M A, Bolles R C. Random sample consensus: A paradigm for model fitting with applications to image analysis and automated cartography [J]. Communications of the ACM, 1981, 24(6): 381-395. [24] Green W R, Grobler H. Normal distribution transform graph-based point cloud segmentation; proceedings of the Pattern Recognition Association of South Africa & Robotics & Mechatronics International Conference, F[C], 2015. [25] Yang Jingyu, Gan Ziqiao, Li Kun, et al. Graph-based segmentation for RGB-D data using 3-D geometry enhanced superpixels [J]. IEEE Transactions on Cybernetics, 2017, 45(5): 927-940. [26] Davis B. Innovative technology workshop on 3D Lidar[R]. Minnesota: University of Minnesota: Center for Transportation Studies, 2016. [27] Zhao F, Jiang H, Liu Z. Recent development of automotive LiDAR technology, industry and trends[C]//Eleventh International Conference on Digital Image Processing (ICDIP 2019). International Society for Optics and Photonics, 2019, 11179: 111794A. [28] Davis S R, Sparks A W, Fegely L, et al. Compact steering technologies for automotive lidar: A comparison between liquid crystal clad waveguides and optical mems[C]//Applications of Lasers for Sensing and Free Space Communications. Optical Society of America, 2018: STu2H. 3. [29] Ackerman E. Quanergy announces $250 solid-state LIDAR for cars, robots, and more[EB/OL]. 2016-06-07/2019-12-28. https://spectrum.ieee.org/cars-that-think/transportation/sensors/quanergy-solid-state-lidar. [30] Schwartz E L. Spatial mapping in the primate sensory projection: Analytic structure and relevance to perception [J]. Biological Cybernetics, 1977, 25(4): 181-194. doi: 10.1007/BF01885636 [31] Cao Jie, Hao Qun, Peng Yuxin, et al. Modeling and simulations of three-dimensional laser imaging based on space-variant structure [J]. Optics & Laser Technology, 2016, 78: 62-70. [32] Li Sihui, Cao Jie, Cheng Yang, et al. Spatially adaptive retina-like sampling method for imaging LiDAR [J]. IEEE Photonics Journal, 2019, 11(3): 1-1. [33] Sandini G, Dario P, Demicheli M, et al. Retina-like CCD sensor for active vision[M]//Dario P, Sandini G, Aebischer P. Robots and Biological Systems: Towards a New Bionics. Berlin: Springer-Verlag, 1993: 553-570. [34] Van Der Spiegel J, Kreider G, Claeys C, et al. A foveated retinalike sensor using CCD technology [J]. Analog VLSI implementation of neural systems, 1989: 189-211. [35] Pardo F, Martinuzzi E. Hardware environment for a retinal CCD visual sensor. Proceedings of the EU-HCM SMART Workshop: Semi-autonomous Monitoring and Robotics Technologies, F[C], 1994. [36] 孙小炜, 李言俊, 陈义. 基于人眼视觉非均匀特性的实时Mean Shift跟踪方法[J]. 光子学报, 2009, 38(3): 719-724. Sun Xiaowei, Li Yanjun, Chen Yi. Real-time Mean Shift tracking method based on human vision non-uniformity [J]. Acta Photonica Sinica, 2009, 38(3): 719-724. (in Chinese) [37] 陈伟海, 宋蔚阳, 荣利霞, 等. 仿人眼功能的三维激光扫描算法[J]. 北京航空航天大学学报, 2009, 35(5): 563-566. Chen Weihai, Song Weiyang, Rong Lixia, et al. 3D laser scanning algorithm for human eye function [J]. Journal of Beijing University of Aeronautics and Astronautics, 2009, 35(5): 563-566. (in Chinese) [38] Ye Ling, Gu Guohua, He Weiji, et al. Adaptive target profile acquiring method for photon counting 3-d imaging lidar [J]. IEEE Photonics Journal, 2016, 8(6): 1-1. [39] Cao Fengmei, Lin Yabin, Bai Tingzhu, et al. Image rotation-elimination based on a retina-like sensor [J]. Optical Engineering, 2015, 54(12): 123105. [40] Cao Jie, Hao Qun, Xia Wenze, et al. Design and realization of retina-like three-dimensional imaging based on a MOEMS mirror [J]. Optics & Lasers in Engineering, 2016, 82: 1-13. [41] 曹峰梅, 颜凯, 王凡, 等. 非矩形探测器阵列在相向运动中的成像优势分析[J]. 北京理工大学学报, 2011, 31(6): 699-702. Cao Fengmei, Yan Kai, Wagn Fan, et al. Imaging advantage analysis of non-rectangular detector arrays in directional motion [J]. Journal of Beijing Institute of Technology, 2011, 31(6): 699-702. (in Chinese) [42] Shapiro J H, Erkmen B I. Ghost imaging: from quantum to classical to computational [J]. Advances in Optics & Photonics, 2010, 2(1): 405-450. [43] Sivakumar S. An introduction to quantum optics: photon and biphoton physics [J]. Contemporary Physics, 2011, 53(1): 72-73. [44] Liu Xuefeng, Chen Xihao, Yao Xuri, et al. Lensless ghost imaging with sunlight [J]. Optics Letters, 2014, 39(8): 2314. doi: 10.1364/OL.39.002314 [45] Sun B, Edgar M P, Bowman R, et al. 3D computational imaging with single-pixel detectors [J]. Science, 2013, 340(6134): 844-847. doi: 10.1126/science.1234454 [46] 韩申生, 龚文林, 陈明亮, 等. 基于稀疏和冗余表象的鬼成像雷达研究进展[J]. 红外与激光工程, 2015, 44(9): 2547-2555. doi: 10.3969/j.issn.1007-2276.2015.09.002 Han Shensheng, Gong Wenlin, Chen Mingliang, et al. Research progress of ghost imaging radar based on sparse and redundant representation [J]. Infrared and Laser Engineering, 2015, 44(9): 2547-2555. (in Chinese) doi: 10.3969/j.issn.1007-2276.2015.09.002 [47] Sun Mingjie, Chen Wen, Liu Tengfei, et al. Image retrieval in spatial and temporal domains with a quadrant detector [J]. IEEE Photonics Journal, 2017, 9(5): 1-6. [48] Phillips D B, Sun M J, Taylor J M, et al. Adaptive foveated single-pixel imaging with dynamic supersampling [J]. Science Advances, 2017, 3(4): e1601782. doi: 10.1126/sciadv.1601782 [49] 龚文林, 王成龙, 梅笑东, 等. 面向实际应用的GISC Lidar近期研究进展与思考[J]. 红外与激光工程, 2018, 47(3): 0302001. Gong Wenlin, Wang Chenglong, Mei Xiaodong, et al. Recent research progress and thoughts on GISC Lidar with respect to practical applications [J]. Infrared and Laser Engineering, 2018, 47(3): 0302001. (in Chinese) [50] 华翌辰. 基于压缩感知的鬼成像研究[D]. 南京: 南京理工大学, 2014. Hua Yichen. Ghost imaging research based on compressed sensing[D]. Nanjing: Nanjing University of Science and Technology, 2014. [51] Howland Gregory A, Lum Daniel J, Ware Matthew R, et al. Photon counting compressive depth mapping [J]. Optics Express, 2013, 21(20): 23822. doi: 10.1364/OE.21.023822 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1035
- HTML全文浏览量: 373
- PDF下载量: 260
- 被引次数: 0

