













-
带有红外光学成像探测导航系统的高速飞行器在大气层内飞行时,其光学头罩与来流之间形成复杂的高速流场,对光学成像探测系统造成热辐射和图像传输干扰,导致目标图像饱和度低和图像模糊,这是航天科技红外成像制导领域亟待解决的问题[1-3]。受大气扰动湍流的影响,红外光学成像探测器获取到的图像往往具有信噪比低,目标边缘细节不清晰,目标形状轮廓和纹理信息不足等问题,为了有效地检测识别目标,必须进行红外图像的复原。
模糊核估计的精确性对红外图像的恢复效果起着至关重要的作用。目前估计模糊核的方法根据图像内容可分为两类:一类是采用整幅图像信息来估计模糊核[4-6]。杨航等人提出了基于结构字典学习的图像复原方法[4];王宗跃等人提出了自适应图像组的稀疏性正则化约束求解模糊核[5];王军等人提出了基于区域滤波的模糊核估计方法[6]。但是并非图中的所有内容都有利于模糊核的估计,全图内容的参与将导致模糊核估计不精确,且冗余信息会加大计算量。另一类则是利用图像中部分信息(如梯度)进行模糊核的估计[7-9];Shan等人提出了一种基于自然图像梯度先验知识和模糊前后局部光滑区域相容性约束的去模糊算法[7];Krishnan等人提出了一种归一化稀疏先验用于模糊核的估计[8];仇翔等人提出了一种基于
$ {L}_{0} $ 稀疏先验的改进正则化去模糊方法[9]。第二类方法中基于图像梯度的方法是利用整幅图的梯度信息进行模糊核的估计,没有考虑图像中部分梯度信息对估计模糊核的不利影响。文中提出了梯度加权$ {L}_{1} $ 范数测度确定图像中有利梯度信息较多的区域来估计模糊核,一方面减少了不利于模糊核估计的信息对估计模糊核的影响,另一方面减少了计算量,提升了估计模糊核的速度。 -
一幅退化图像中,并非所有的梯度信息都有利于模糊核的估计。首先图像中小结构的提取对噪声较敏感,其次模糊较大时图像中的小结构信息被淹没,再者细纹理区域包含了大量细小的重复模式,模糊后退化信息重叠在一起。这些问题均导致梯度信息提取中混杂了大量不利于模糊核估计的小结构区域和细纹理区域,进而使得模糊核估计不精确。文中从梯度域出发,寻找有效退化信息较多的连续大梯度区域,由于图像模糊的同时可能被噪声污染,差分梯度方法对噪声敏感,会得到不准确的梯度信息。文中利用抗噪能力强的多尺度形态学梯度算子计算图像梯度,获取更为准确的图像梯度信息。
-
单尺度形态梯度算子[10]可定义为:
$$ \begin{split} \nabla g\left( {i,j} \right) =& \left[ {g\left( {i,j} \right) \oplus {S_R}\left( {i,j} \right)} \right]-\\ & \left[ {g\left( {i,j} \right) \ominus {S_R}\left( {i,j} \right)} \right] \end{split} $$ (1) 式中:
$ g $ 为输入图像;$ R $ 为结构元素半径;$ {S}_{R} $ 为尺寸为$ \left(2R+1\right)\times \left(2R+1\right) $ 的平面结构元素;$ \oplus $ 和$ \ominus $ 分别表示膨胀和腐蚀运算。结构元素$ {S}_{R} $ 的大小决定了梯度算子的性能:大的$ {S}_{R} $ 抗噪能力强,但会造成边缘间严重的互相影响,导致梯度信息的不准确;小的结构元素使得梯度算子有高的空间分辨率,但抗噪能力较差。为了结合大、小结构元素的各自优点,文中使用多尺度形态学梯度算子:$$ \begin{split} \nabla g\left( {i,j} \right) = & 1/n\mathop\sum \limits_{R = 1}^n \{ [\left( {g\left( {i,j} \right) \oplus {S_R}\left( {i,j} \right)} \right)-\\ & \left( {g\left( {i,j} \right) \ominus {S_R}\left( {i,j} \right)} \right)] \ominus {S_{R - 1}}\left( {i,j} \right) \end{split} $$ (2) 式中:
$ n $ 为尺度,该实验中$ n $ 取3;结构元素半径$ R $ 取1、2、3,正方形结构元素$ {S}_{R} $ 边长分别3、5、7;$ {S}_{0} $ 表示边长为1的结构元素。对一幅含有高斯白噪声的地面目标图像进行测试,如图1(a)所示。图1(b)和图1(c)分别是差分梯度图和多尺度形态学梯度图,图1(d)和1(e)是对应的梯度剖面图(第128行像素)。显然,该算子具备相对较强的抗噪性能和较强的抗边缘间相互影响能力,当退化图像中含有噪声时,多尺度形态梯度相比差分梯度有较大优势。

图 1 梯度对比
Figure 1. Comparison of gradient
-
首先利用梯度有用性对图像梯度进行预处理,滤除部分对估计模糊核不利的图像小结构。梯度有用性定义如下:
$$ e\left( {i,j} \right) = \dfrac{{{{\left\| {\displaystyle \mathop \sum \nolimits_{\left( {i',j'} \right) \in {N_r}\left( {i,j} \right)} \nabla g\left( {i',j'} \right)} \right\|}_2}}}{{\displaystyle \mathop \sum \nolimits_{\left( {i',j'} \right) \in {N_r}\left( {i,j} \right)} {{\left\| {\nabla g\left( {i',j'} \right)} \right\|}_2} + c}} $$ (3) 式中:
$ \Vert \cdot {\Vert }_{2} $ 为$ {l}_{2} $ 范数;$ g $ 为模糊图;$ {N}_{r}\left(i,j\right) $ 为以$ \left(i,j\right) $ 中心的半径为$ r $ 的邻域;$ \left({i}',{j}'\right) $ 为邻域内的像素索引,$ {i}'=i\pm k $ ,$ {j}'=j\pm l $ ,$ k,l=\mathrm{0,1},2\cdots ,r $ ;常数$ c $ 是为了防止分式在图像平坦区仍然有意义,如果$ c $ 取值过小(小于0.1),会导致平坦区的$ e $ 值过大,保留过多的平坦区域梯度信息;如果$ c $ 取值过大(大于1),会导致边缘处$ e $ 值太小,损失部分边缘的梯度信息。因此,最终将$ c $ 的取值范围限定在0.1-1之间,然后在该范围内选取0.5作为$ c $ 的具体值。$ \Vert {\displaystyle \sum }_{\left({i}',{j}'\right)\in {N}_{r}\left(i,j\right)}\nabla g\left({i}',{j}'\right){\Vert }_{2} $ 可以消除$ \nabla g\left({i}',{j}'\right) $ 中的梯度峰值,即图像梯度中的小结构梯度;$ {\displaystyle \sum }_{\left({i}',{j}'\right)\in {N}_{r}\left(i,j\right)}\Vert \nabla g\left({i}',{j}'\right){\Vert }_{2} $ 为$ {N}_{r}\left(i,j\right) $ 中梯度$ {l}_{2} $ 范数之和。通过计算$ e\left(i,j\right) $ ,可以确定出对模糊核估计有利的区域,一个数值小的$ e $ 意味着这个区域是小结构区域或者平坦区域,因此,笔者通过一个阈值$ {\tau }_{n} $ 来滤除梯度图像中这两个区域的梯度值:如果该阈值过小,无法滤除小结构和细小纹理区域的梯度信息;如果该阈值过大,会损失对估计模糊核的有利信息。对于该阈值的取值,笔者通过经验设定,实验中$ e $ 的取值范围为0~1,笔者认为该梯度有用性指标中最小的10%的值所对应的图像信息是不利于模糊核估计的,故而将阈值设定为0.1。$$ \nabla g'\left( {i',j'} \right) = \nabla g\left( {i',j'} \right)\delta \left( {e\left( {i,j} \right),{\tau _n}} \right) $$ (4) 式中:
$ \delta \left(\bullet \right) $ 为一个阶跃函数,大于阈值$ {\tau }_{n} $ 输出1,否则输出0。$$ \delta \left( {e\left( {i,j} \right),{\tau _n}} \right) = \left\{ {\begin{array}{*{20}{c}} 1&{e\left( {i,j} \right) > {\tau _n}}\\ 0&{\text{其他}} \end{array}} \right. $$ (5) 利用公式(5)对梯度进行阈值处理后,笔者提出一个衡量图像中大梯度区域的测度
$ \omega $ :$$ \omega \left( {i,j} \right) = \displaystyle \mathop \sum \limits_{\left( {i',j'} \right) \in {N_r}\left( {i,j} \right)} {\left\| {\lambda \left( A \right)\nabla g'\left( {i',j'} \right)} \right\|_1} $$ (6) 式中:
$ \Vert \cdot {\Vert }_{1} $ 为$ {l}_{1} $ 范数;$ \lambda \left(A\right) $ 为连通系数,作用是去除邻域内不连续杂乱像素点的影响,定义如下:$$ {\rm{\lambda }}\left( A \right) = \left\{ {\begin{array}{*{20}{c}} 0&{A \le 3}\\ 1&{A > 3} \end{array}} \right. $$ (7) $ A $ 为邻域内像素的连通量,通过依次搜索当前像素点的8邻域(如图2所示)得到。给8邻域的各个方向赋一个方向码0~7,以8邻域的邻域中心为搜索起点,按照方向码的优先级来进行邻域搜索,0的优先级最高,7的优先级最低。搜索到邻域内存在非0像素点,就将该像素点更新为搜索起点,并将连通量$ A $ 加1,直到$ \left(2r+1\right)\times \left(2r+1\right) $ 的邻域全部搜索完毕。一般情况下,当$ A $ 的值小于等于3时,该像素点为不连续杂乱像素点;当$ A $ 的值大于3时,为连续梯度的像素点。
图 2 点P的8邻域方向码
Figure 2. 8 neighborhood direction codes of point P
对地面飞机目标图像(图3(a))进行梯度测度的计算,确定图像中的大梯度区域,结果如图3(b)所示。根据大梯度分布在退化图上确定用于估计模糊核区域,结果如图3(c)所示。

图 3 核估计区域确定
Figure 3. Determined region for kernel estimation
-
图像退化前后,虽然图像边缘的像素灰度值分布发生了变化,但是边缘所在相对位置并没有改变。首先笔者沿边缘像素点垂直方向向灰度值增大的一边逐像素搜索,直到找到最大值区域位置,用最大值预测原边缘的峰值信息。用同样的方法寻找最小值位置。然后沿边缘方向逐点搜索并对边缘周边两侧区域像素值进行预测和插值以获得局部清晰图像。对于处于边缘上过渡区的像素,依据搜索到的像素最大值和最小值的加权值来赋值,这一加权值可以根据最大值和最小值所在位置到中心像素的距离来确定,最后得到轮廓周边的局部清晰图像预测图[11]。
-
得到模糊核估计区域后,采用该区域估计点扩散函数。如果不考虑噪声,图像退化可以建模成清晰图像
$ f $ 与点扩散函数$ h $ 的卷积运算:$$ g\left( {i,j} \right) = f\left( {i,j} \right) \otimes h\left( {i,j} \right) $$ (8) 将上式中的卷积计算转换成向量乘法形式:
$$ {{b}} = {{Ah}} $$ (9) 式中:
$ {A} $ 是与模糊点对应的预测图上的一块区域;$ {b} $ 为取自于模糊图像的像素点所构成的一维列向量;$ {h} $ 是一维列向量形式的点扩散函数。此方程组的最小二乘准则函数为:
$$ \begin{array}{l} J\left( {{h}} \right) = {\left\| {{{Ah}} - {{b}}} \right\|^2}\\ \hat {{h}} = \mathop {\min }\limits_h J\left( {{h}} \right),{{h}} \ge 0 \end{array} $$ (10) 但是,由于预测图像与清晰图像的差异以及噪声难以避免,利用最小二乘准则所获取的模糊核不够准确,采用基于空间相关约束的非负最小二乘法来估算退化模型[12]。对于给定的非负性和空间相关性约束条件,在最小二乘准则函数上增加两个惩罚项,则得到的代价函数如下:
$$ \begin{split} J\left( {{h}} \right) =& {\left\| {{{Ah}} - {{b}}} \right\|^2} + \eta {\left\| {{{\varLambda {\rm h}}}} \right\||^2}+\\ & \lambda \displaystyle \mathop \sum \limits_i \displaystyle \mathop \sum \limits_w \alpha \left( {\left| {\nabla {{h}}\left( {i,w} \right)} \right|} \right){\left( {{{{h}}_i} - {{{h}}_w}} \right)^2}\\ \hat {{h}} = & \mathop {\min }\limits_{{h}} J\left( {{h}} \right),{{h}} \ge 0 \end{split} $$ (11) 式中:
$ \eta $ 和$ \lambda $ 为正则化系数;$ \eta {\left\| {\varLambda {{h}}} \right\|^2}$ 为非负性惩罚项,用来保证点扩散函数的非负性;$ \varLambda $ 为对角矩阵,对角线上的值由$ {h} $ 决定:$$ \varLambda = diag\left\{ {{\lambda _1},{\lambda _2}, \ldots ,{\lambda _i}, \ldots ,{\lambda _{{M^2}}}} \right\} $$ (12) $$ {\lambda _i} = \left\{ {\begin{array}{*{20}{c}} {1,{{{h}}_i} < 0}\\ {0,{{{h}}_i} \ge 0} \end{array}} \right. $$ (13) 惩罚项
$ \lambda \displaystyle \mathop \sum \nolimits_i \displaystyle \mathop \sum \nolimits_w \alpha \left( {\left| {\nabla {{h}}\left( {i,w} \right)} \right|} \right){\left( {{{{h}}_i} - {{{h}}_w}} \right)^2}$ 用来保证退化模型相邻点之间的差异在先验知识的约束条件下为极小,从而使退化模型具有空间相关性。$$ \left| {\nabla {{h}}\left( {i,w} \right)} \right| = \left| {{{{h}}_i} - {{{h}}_w}} \right| $$ (14) $ \alpha \left(·\right) $ 是各向异性的平滑因子,表达式如下:$$ \alpha \left( {\left| {\nabla {{h}}\left( {i,w} \right)} \right|} \right) = \dfrac{{{{\left| {\nabla {{h}}\left( {i,w} \right)} \right|}^2}}}{{1 + {{\left| {\nabla {{h}}\left( {i,w} \right)} \right|}^2}}} $$ (15) 采用滞后迭代极小化算法[13]求解
$ {{\widehat{h}}}_{k} $ ,令目标函数导数为零解得:$$ {\hat {{h}}_k} = \dfrac{{{A^{\rm T}}{{b}}}}{{{A^{\rm T}}A + \eta {\varLambda ^{k - 1}} + \lambda \displaystyle\mathop \sum \nolimits_i \mathop \sum \nolimits_w \alpha \left( {\left| {\nabla {{h}}\left( {i,w} \right)} \right|} \right){{\left( {{{{h}}_i} - {{{h}}_w}} \right)}^2}}} $$ (16) 直至满足
$ \dfrac{{\left| {{{\hat {{h}}}^k} - {{\hat {{h}}}^{k - 1}}} \right||}}{{\left| {\left| {{{\hat {{h}}}^k}} \right|} \right|}} < \varepsilon $ ,实验中$ \epsilon $ 取值为$ {10}^{-6} $ 。 -
利用模糊核估计区域得到点扩散函数后,采用基于FFTW[14]的非盲反卷积方法恢复图像。为了抑制噪声,更好地恢复图像细节,文中采用改进的最大似然估计(ML)复原方法[15]:
$$ \begin{aligned} {{\hat f}^{n + 1}}\left( x \right) =& {{\hat f}^n}\left( x \right)\dfrac{1}{{\left( {1 + \varphi L\left( {\nabla {f^n}} \right)} \right)}} \times &\\ & \displaystyle \mathop \sum \limits_{y \in Y} g\left( y \right)\dfrac{{h\left( {y - x} \right)}}{{\displaystyle \mathop \sum \nolimits_{z \in X} h\left( {y - z} \right){{\hat f}^n}\left( z \right)}} \end{aligned} $$ (17) 式中:
$\varphi$ 为规整化系数;$ L\left(\nabla {f}^{n}\right)=\displaystyle \sum _{x'}2\alpha (\nabla {f}^{n})\nabla {f}^{n} $ 为一个各项异性规整项;$ \alpha (\nabla {f}^{n}) $ 为规整化权函数(如高斯函数)。为了抑制边界振铃效应,须对图像进行边界延拓,如图4所示,O为原图,A、B、C分别代表扩展的部分,文中使用FFTW进行边界延拓,对任意尺寸的图像,扩展后的图像尺寸不必为2的幂次方个像素点,对图像进行像素级的扩展即可进行离散傅里叶变换,较大地减少了计算量,进而提升了图像反卷积速度。

图 4 图像扩展示意图
Figure 4. Schematic diagram of image expansion
-
对于有两个以上区域的情况(如图5所示),根据不同区域计算出多个模糊核,对于不同模糊核采用相似性进行计算,计算公式如下:

图 5 多个模糊核估计区域
Figure 5. Multiple region for kernel estimation
$$ R\left( {{{{h}}_1},{{{h}}_2}} \right) = \dfrac{{{{{h}}_1},{{{h}}_2}}}{{\left| {{{{h}}_1}\left| \cdot \right|{{{h}}_2}} \right|}} $$ (18) 式中:
$ {{h}}_{1} $ 和$ {{h}}_{2} $ 分别为估计出的模糊核的向量形式;R的取值在$ \left[\mathrm{0,1}\right] $ 内,越接近1表示模糊核的相似度越高。确定一个相关性阈值$ T $ (文中取0.95),文中认为,当R≥T时,图像为空不变退化;当R<T时,图像为空变退化。 -
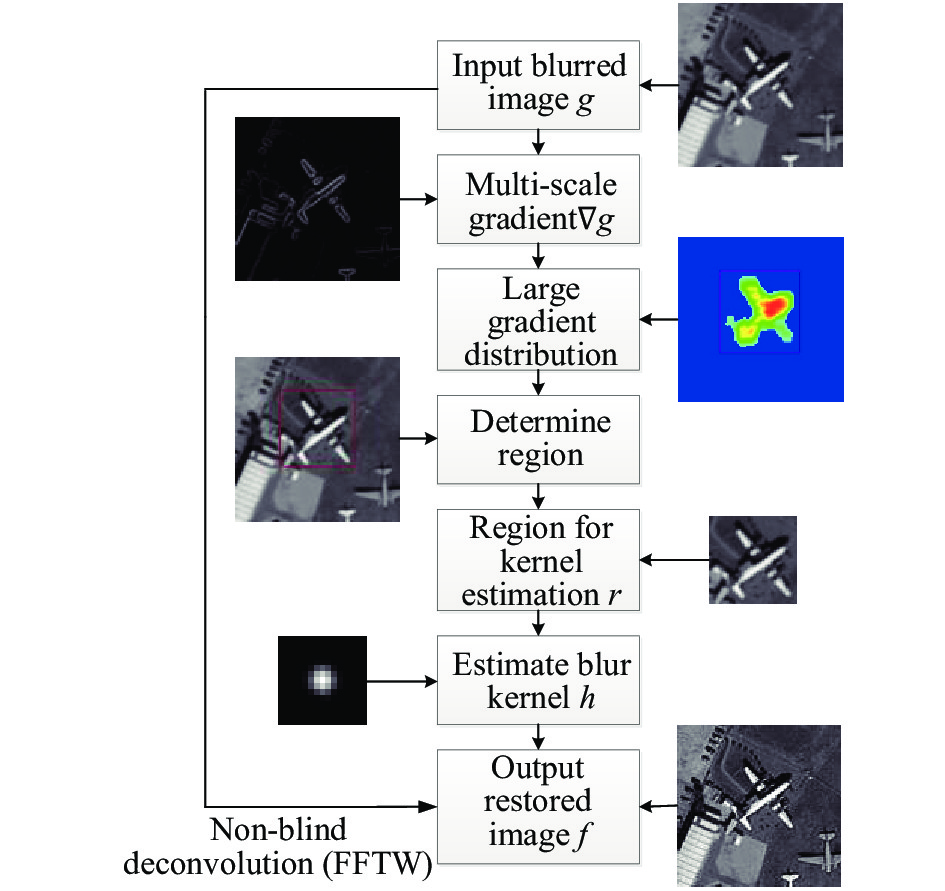
当图像退化为空不变时,图像复原方法流程如图6所示。

图 6 空不变退化图像复原流程图
Figure 6. Flowchart of space-invariant image restoration
-
当图像为空变退化时,采用空变图像复原方法,其流程见图7,主要步骤如下:

图 7 空变图像复原流程图
Figure 7. Flowchart of space-variant image restoration
(1)计算多尺度梯度:利用多尺度梯度算子(公式(2))求取退化图像的梯度;
(2)计算梯度分布:先利用公式(3)滤除图像部分小梯度结构,然后利用文中提出的梯度测度(公式(6))计算梯度分布;
(3)确定核估计区域:根据梯度分布在退化图中确定相应的区域;
(4)估计模糊核:根据不同的核估计区域使用公式(11)~(16)估计出相应的模糊核;
(5)图像分块:根据核估计区域将图像进行分块,每一块图像近似为空不变模糊。
(6) 分块复原:利用公式(17)对分块图像进行非盲反卷积得到复原图像块。
(7) 分块合并:将图像分块合并,对块边界进行灰度融合,确保边界处二阶微分连续[11],得到整幅复原图像。
-
文中算法采用VC6.0的C++程序实现,运行环境为Windows7,处理器为Intel Core i5。实验所用遥感卫星图像和红外图像来自于CVOnline图像数据库[16]。
实验一:为了验证文综算法的有效性,使用3幅仿真图像进行测试,分别是教堂、飞机、海港,尺寸均为256×256。与Shan的算法[7]、Krishnan的算法[8]作比较,实验结果如图8所示。图8(a)是已知模糊核的仿真模糊图像,复原图像和估计的模糊核分别见图8(b)、(c)、(d)。相比之下,该算法对于细节丰富和纹理复杂的区域的复原效果更好,恢复出的边缘更加清晰,目标更加突出。为了定量测试文中算法估计模糊核的精确性,计算了不同算法估计的模糊核与已知模糊核的相似性,如表1所示。与另外两种算法相比,文中算法估计出的模糊核与已知模糊核的相似性最高。此外,采用峰值信噪比PSNR和结构相似性SSIM两个指标评价图像的复原质量,实验结果如图9所示,可以直观地看到复原结果具有更高的PSNR和SSIM值。
表 1 核相似性对比
Table 1. Comparison of the kernel similarity
Images Shan Krishnan Proposed Church 0.9173 0.9187 0.9664 Airplane 0.9511 0.9454 0.9615 Harbor 0.9682 0.9441 0.9729 Power station 0.9040 0.9361 0.9660 Intersection 0.8363 0.9407 0.9711 
图 8 地面目标退化图像复原结果对比
Figure 8. Comparison of restoration results of degraded images of ground targets

图 9 PSNR和SSIM对比
Figure 9. Comparison of PSNR and SSIM
在耗时方面,统计了尺寸分别为256×256、320×240、512×512、630×460、1080×1440的图像模糊核估计耗时,并与Shan的算法和Krishnan的算法耗时进行对比,结果如表2所示。相较于其他两种算法使用整幅图进行模糊核估计,使用局部区域估计模糊核,且采用FFTW进一步减少了反卷积的计算量,对于同尺寸的图像,文中方法耗时更短,这种优势在尺寸较大的图像上表现得尤为明显。实验结果表明:使用文中确定的模糊核估计区域而不是整幅图估计模糊核能够有效减少计算量,提升图像复原速度。
表 2 模糊核估计耗时对比
Table 2. Comparison of blur kernel estimation time
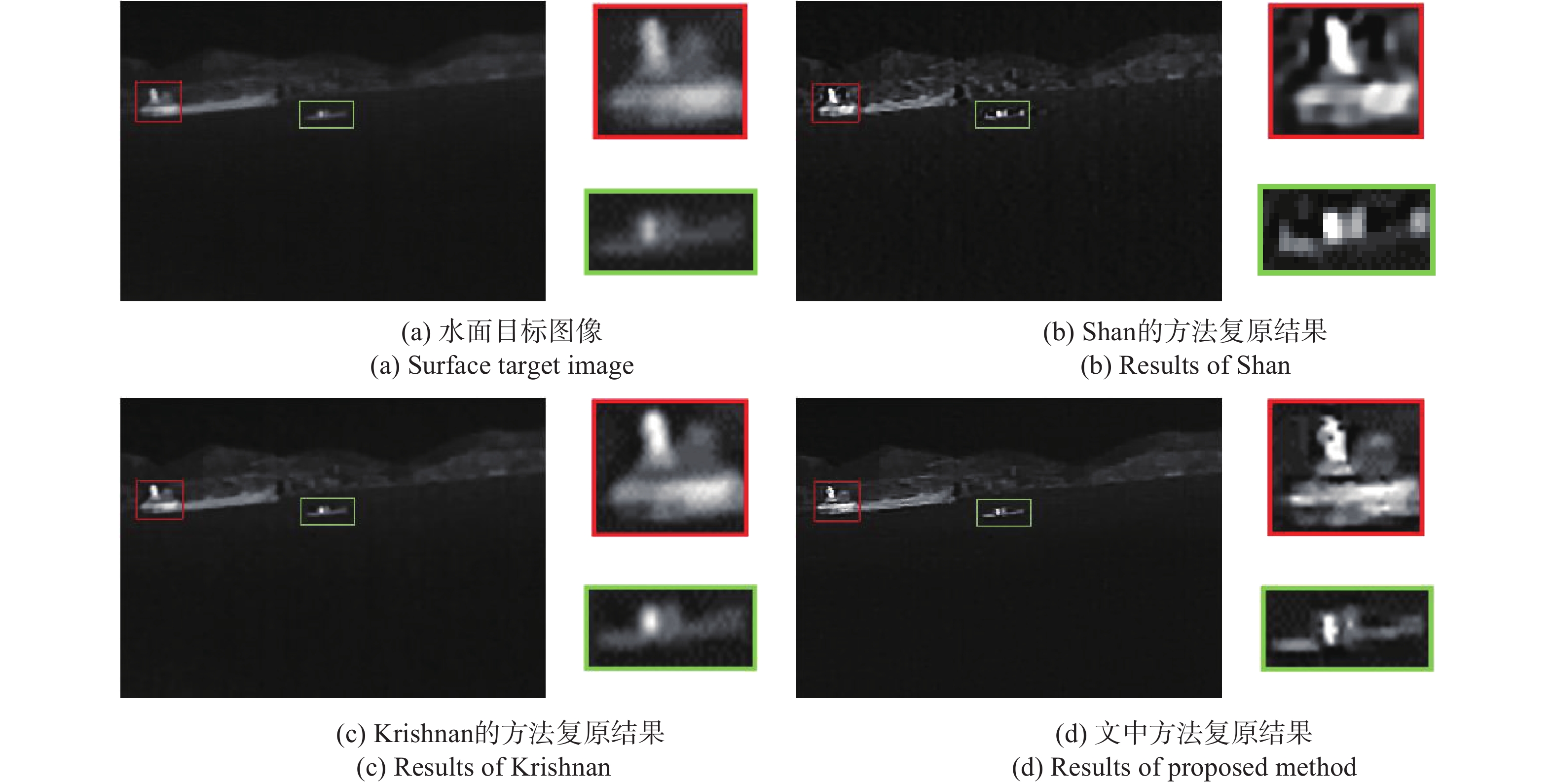
Images Shan Krishnan Proposed 256×256 13.284 s 5.161 s 3.350 s 320×240 16.362 s 5.773 s 5.621 s 512×512 19.726 s 17.901 s 9.694 s 630×460 26.213 s 22.533 s 9.885 s 1 080×1 440 83.221 s 53.417 s 28.925 s 实验二:通过两幅真实目标图像测试文中算法,结果如图10所示。图10(a)为640×480的水面目标红外图像。图10(b)为Shan算法的复原结果,图10(c)为Krishnan算法的复原结果,图10(d)为文中算法的复原结果。Shan算法的复原结果中目标和边界有一定的振铃伪影,Krishnan的算法复原结果仍然有一定的模糊残留(如图中细节对比)。文中方法采用加权L1范数测度确定模糊核估计区域,减小了图像中部分信息对模糊核估计的不利影响,由于估计的模糊核更为精确,有更好的复原视觉效果。

图 10 实际空中及水面目标退化图像复原结果对比
Figure 10. Comparison of restoration results of degraded images of real air and surface targets
实验三:文中的方法也可以用于局部近似均匀的空变退化图像的复原,使用一组512×512的地面目标图像(如图11(a)和(e))进行测试。图11中(b)和(f)为采用梯度测度确定的模糊核估计区域,图11(c)和(g)为确定的多个模糊核估计区域估计出的模糊核,根据模糊核估计区域对图像进行分块,每个图像块内的模糊近似为空不变模糊,然后对每个图像块进行分块复原并合并,最终复原结果见图11(d)和(h)。由实验结果可知,文中方法也可以较好地复原空变退化图像。

图 11 空变图像复原结果
Figure 11. Results of space-variant image restoration
-
文中提出了基于多尺度形态学梯度加权
$ {L}_{1} $ 范数测度的模糊核区域估计及空可变复原方法。基于图像梯度定义利于模糊核估计的梯度加权$ {L}_{1} $ 范数测度,获得模糊核估计区域,根据对清晰图像边缘的预测,使用空间相关约束的非负最小二乘法估计模糊核,利用模糊核的相似性确定退化图像空不变性或者空变性,进而采用空不变或者空变复原方法对图像进行复原。在频域使用FFTW进行离散傅里叶变换,该变换可以对任意尺寸的图像进行处理,不需要对图像进行周期性边界延拓,较大地提升了反卷积的速度。由于利用确定的区域估计模糊核减少了计算量以及冗余信息对估计模糊核的不利影响,而且在反卷积阶段使用了FFTW进行运算减少了耗时,使得文中的复原方法兼具快速性和准确性。
Blur kernel region estimation and space variant restoration based on weighted L1 norm measure
-
摘要: 先进的图像盲复原方法主要体现在模糊核估计的准确性和快速性两方面。针对目前图像复原方法存在信息冗余和有效信息利用不足所引起的模糊核估计耗时长和不精确等问题,我们提出了加权
$ {L}_{1} $ 范数测度的模糊核区域估计及空可变复原方法。首先提取退化图像的多尺度形态学梯度,抑制噪声对图像有用信息的干扰;然后定义利于模糊核估计的梯度加权$ {L}_{1} $ 范数测度,解决小结构区域和细纹理区域导致的模糊核求解不精确问题,提取利于模糊核估计的区域;最后利用区域模糊核的相似性区分图像退化的空不变性和空变性,分别采用空不变和空变复原方法对退化图像进行复原。在反卷积阶段,采用FFTW进行傅里叶变换计算,较大地提升了复原速度。大量实验结果表明,提出的算法仅用单帧图像就能够快速有效地复原图像。Abstract: The advanced image blind restoration method is mainly reflected in the accuracy and rapidity of kernel estimation. Aiming at the problems of inaccurate blur kernel estimation and high time complexity caused by the redundant information or insufficient effective information in the current deblur methods, a blur kernel region estimation and space-variant restoration based on weighted$ {L}_{1} $ norm measure was presented. First, the multi-scale morphological gradient of the gradient image was extracted to suppress the interference of noise on the image; Then, the gradient weighted$ {L}_{1} $ norm measure was defined to be conducive to blur kernel estimation, the inaccuracy of blur kernel transformation caused by flat regions and tiny structure regions was solved, and the region of blur kernel estimation was obtained; Finally, the similarity of two or more regional blur kernels were used to determine the blur kernel estimation area of a space-invariant or space-variant degraded image. Since the selected kernel estimation region is much smaller than the whole image, the kernel estimation can be performed quickly. In the deconvolution phase, FFTW was used to do the calculation of Fourier transform, which greatly improved the speed of restoration. Extensive experiments show that proposed method can restore degraded image quickly and effectively. -
图 8 地面目标退化图像复原结果对比
Figure 8. Comparison of restoration results of degraded images of ground targets
图 10 实际空中及水面目标退化图像复原结果对比
Figure 10. Comparison of restoration results of degraded images of real air and surface targets
表 1 核相似性对比
Table 1. Comparison of the kernel similarity
Images Shan Krishnan Proposed Church 0.9173 0.9187 0.9664 Airplane 0.9511 0.9454 0.9615 Harbor 0.9682 0.9441 0.9729 Power station 0.9040 0.9361 0.9660 Intersection 0.8363 0.9407 0.9711  下载: 导出CSV
下载: 导出CSV
表 2 模糊核估计耗时对比
Table 2. Comparison of blur kernel estimation time
Images Shan Krishnan Proposed 256×256 13.284 s 5.161 s 3.350 s 320×240 16.362 s 5.773 s 5.621 s 512×512 19.726 s 17.901 s 9.694 s 630×460 26.213 s 22.533 s 9.885 s 1 080×1 440 83.221 s 53.417 s 28.925 s
下载: 导出CSV
-
[1] 李珂, 王晓蕊, 郭冰涛, 等. 载体平台振动下红外系统成像模糊效应动态仿真[J]. 红外与激光工程, 2018, 47(9): 0904004. Li Ke, Wang Xiaorui, Guo Bingtao, et al. Dynamic simulation of infrared system imaging blur effect caused by carrier platform vibration [J]. Infrared and Laser Engineering, 2018, 47(9): 0904004. (in Chinese) [2] 张玉叶, 周胜明, 赵育良, 等. 高速运动目标的运动模糊图像复原研究[J]. 红外与激光工程, 2017, 46(4): 0428001. Zhang Yuye, Zhou Shengming, Zhao Yuliang, et al. Motion-blurred image deblurring of fast moving target [J]. Infrared and Laser Engineering, 2017, 46(4): 0428001. (in Chinese) [3] 张天序. 成像自动目标识别[M]. 武汉: 湖北科学技术出版社, 2005. Zhang Tianxu. Automated Recognition of Imaged Targets[M]. Wuhan: Hubei Science and Technology Press, 2005.(in Chinese) [4] 杨航, 吴笑天, 王宇庆. 基于结构字典学习的图像复原方法[J]. 中国光学, 2017, 10(2): 207-218. doi: 10.3788/co.20171002.0207 Yang Hang, Wu Xiaotian, Wang Yuqing. Image restoration approach based on structure dictionary learning [J]. Chinese Optics, 2017, 10(2): 207-218. (in Chinese) doi: 10.3788/co.20171002.0207 [5] 王宗跃, 夏启明, 蔡国榕, 等. 自适应图像组的稀疏正则化图像复原[J]. 光学 精密工程, 2019, 27(12): 2713-2721. doi: 10.3788/OPE.20192712.2713 Wang Zongyue, Xia Qiming, Cai Guorong, et al. Image restoration based on adaptive group images sparse regularization [J]. Optics and Precision Engineering, 2019, 27(12): 2713-2721. (in Chinese) doi: 10.3788/OPE.20192712.2713 [6] 王军, 何昕, 魏仲慧, 等. 基于区域滤波的模糊星图复原方法[J]. 中国光学, 2019, 12(2): 321-331. doi: 10.3788/co.20191202.0321 Wang Jun, He Xin, Wei Zhonghui, et al. Restoration method for blurred star images based on region filters [J]. Chinese Optics, 2019, 12(2): 321-331. (in Chinese) doi: 10.3788/co.20191202.0321 [7] Shan Q, Jia J, Agarwala A. High-quality motion deblurring from a single image [J]. ACM Transactions on Graphics, 2008, 27(3): 1. [8] Krishnan D, Tay T, Fergus R. Blind deconvolution using a normalized sparsity measure[C]//Computer Vision and Pattern Recognition (CVPR), 2011 [9] 仇翔, 戴明. 基于<italic>L</italic><sub>0</sub>稀疏先验的相机抖动模糊图像复原[J]. 光学 精密工程, 2017, 25(9): 2490-2498. doi: 10.3788/OPE.20172509.2490 Chou Xiang, Dai Ming. Blind restoration of camera shake blurred image based on <italic>L</italic><sub>0</sub> sparse priors [J]. Optics and Precision Engineering, 2017, 25(9): 2490-2498. (in Chinese) doi: 10.3788/OPE.20172509.2490 [10] 刘黎辉, 张剑, 谭芳芳, 等. 抗噪的多尺度形态学边缘检测算法[J]. 数据采集与处理, 2017, 32(3): 621-628. Liu Lihui, Zhang Jian, Tan Fangfang, et al. Multi-scale morphology algorithm for image edge detection with noise resistance [J]. Journal of Data Acquisition and Processing, 2017, 32(3): 621-628. (in Chinese) [11] 洪汉玉. 目标探测多谱图像复原方法与应用[M]. 北京: 国防工业出版社, 2017. Hong Hanyu. Restoration Method and Application for Multi-spectral Image in Object Detection[M]. Beijing: National Defense Industry Press, 2017.(in Chinese) [12] Hong Hanyu, Park I K. Single image motion deblurring using adaptive anisotropic regularization [J]. Optical Engineering, 2010, 49(9): 1-13. [13] Hong Hanyu. Universal deblurring method for real images using transition region [J]. Optical Engineering, 2010, 51(4): 47-52. [14] Guarrasi M, Li N, Frigio S, et al. Testing and implementing some new algorithms using the FFTW library on massively parallel supercomputers [J]. Advances in Parallel Computing, 2014: 375-386. [15] 何成剑, 洪汉玉, 张天序, 等. 基于双重规整化的气动退化图像盲复原方法[J]. 红外与激光工程, 2007, 36(2): 236-239. doi: 10.3969/j.issn.1007-2276.2007.02.024 He Chengjian, Hong Hanyu, Zhang Tianxu, et al. Aero degraded image blind restoration algorithm based on double regularization [J]. Infrared and Laser Engineering, 2007, 36(2): 236-239. (in Chinese) doi: 10.3969/j.issn.1007-2276.2007.02.024 [16] Cheng Gong, Han Junwei, Lu Xiaoqiang. Remote sensing image scene classification: benchmark and state of the art [J]. Proceedings of the IEEE, 2017, 105(10): 1865-1883. doi: 10.1109/JPROC.2017.2675998 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 427
- HTML全文浏览量: 166
- PDF下载量: 20
- 被引次数: 0

































































































