




-
世界各国开展了多次深空探测任务,探测方法也分为环绕、原位探测和着陆采样等[1]。深入了解小行星形成与演化机理、探索太阳系奥秘等一系列科学问题的最直接手段是开展小行星着陆探测。因此,小行星探测的精确着陆至关重要。小行星探测目标的各种特性不确定性高,如尺寸、地形、反照率、天体环境等,对导航造成极大的困难,需要在接近目标后在线探测与建模。并且探测器与地面通信之间存在较大延迟,仅靠惯性导航难以满足任务要求,光学导航是解决上述问题的一个有效办法。
光学导航(OpNav)[2]是利用光学物理手段,即图像的获取和处理,来测量航天器与环境之间的相对运动程度的系统,进而确定相对位置和姿态信息。被动式OpNav基于光学相机,而主动式OpNav基于激光或LIDAR。被动式方法的优点是参考地图分辨率高和传感器成本低,而主动式方法可以在任何照明条件下操作。被动式具有更高成熟度,工作距离更大,基于被动相机的光学导航方法越来越受到人们的重视。喷气推进实验室(JPL)开发了自主导航系统(AutoNav)[3],利用星上执行部分或全部的导航功能克服通信延迟。自主光学导航(Autonomous Optical Navigation,AON)[4]利用近距离航天器拍摄的小行星图像,以及图像中出现的陆标信息,在小行星附近自主执行航天器导航。光学导航在NEAR、Hayabusa、Rosetta、Dawn和OSIRIS-REx等任务中试验、发展、成熟,自主性与精确性越来越高。下降着陆段的光学导航多采用地形相对导航(TRN),其中基于Stereophotoclinometry(SPC,一种三维重建方法)[5]陆标的导航方法,运用最为广泛。
小行星探测已被列入中国未来深空探测四项重大任务中[6],并于2019年初确定,通过一次发射实现一颗近地小行星2016HO3取样返回和一颗主带彗星133P绕飞探测。根据国内小行星探测任务需要,文中对小行星探测下降着陆段的被动式光学导航方法进行了综述,总结了以往小行星探测任务的光学导航方法以及地形相对导航的发展现状,概述了下降着陆段光学导航的关键技术及发展趋势。
-
在小行星着陆任务中,通常将整个航行过程分为自由飞行段、接近交会段、绕飞探测段与下降着陆段[7]。对于下降着陆,一些引力较弱的小行星,一般称为附着而非着陆。在下降着陆段,由于距离小行星过近,小行星的亮度大大超过导航星;小行星扩展到许多像素上,使得中心寻找变得困难;当天体充满相机视野时,其他天体完全被遮住了。因此传统的基于恒星参考的光学导航失效了[8]。同时,当小行星覆盖像素越来越多,小行星的表面特征就会显现出来。这些特征定义为陆标(天体表面的固定点),可以像恒星一样用来确定相机的方向和航天器相对天体的位置。陆标为光学导航提供测量数据,可以是陨石坑、岩石等小行星表面的突出自然特征;也可以是对小行星表面拍摄图像中的图像特征;还可以是小行星表面的一个局部区域,而不是明显的特征;甚至是人工陆标。
2001年2月12日,“NEAR Shoemaker”着陆到小行星Eros上,成为首个小行星着陆探测器。NEAR导航系统采用陆标跟踪和激光测距的导航技术,结合NASA的深空网络(DSN)无线电跟踪技术[9]。陆标点被定义为由陆标陨石坑边缘定义的中心。这次任务在地面使用光学导航确定轨道和对小行星三维建模。
MUSES-C任务下降段[10],通过导航相机对表面进行拍照,从图像中提取、跟踪自然表面特征,结合激光测距仪测量探测器到小行星表面特征的距离,再经过导航滤波器处理这些图像和距离信息来确定探测器的位置和速度。最终着陆过程则利用释放人工陆标的方法进行导航[11],但人工陆标必须在导航相机视场范围内。
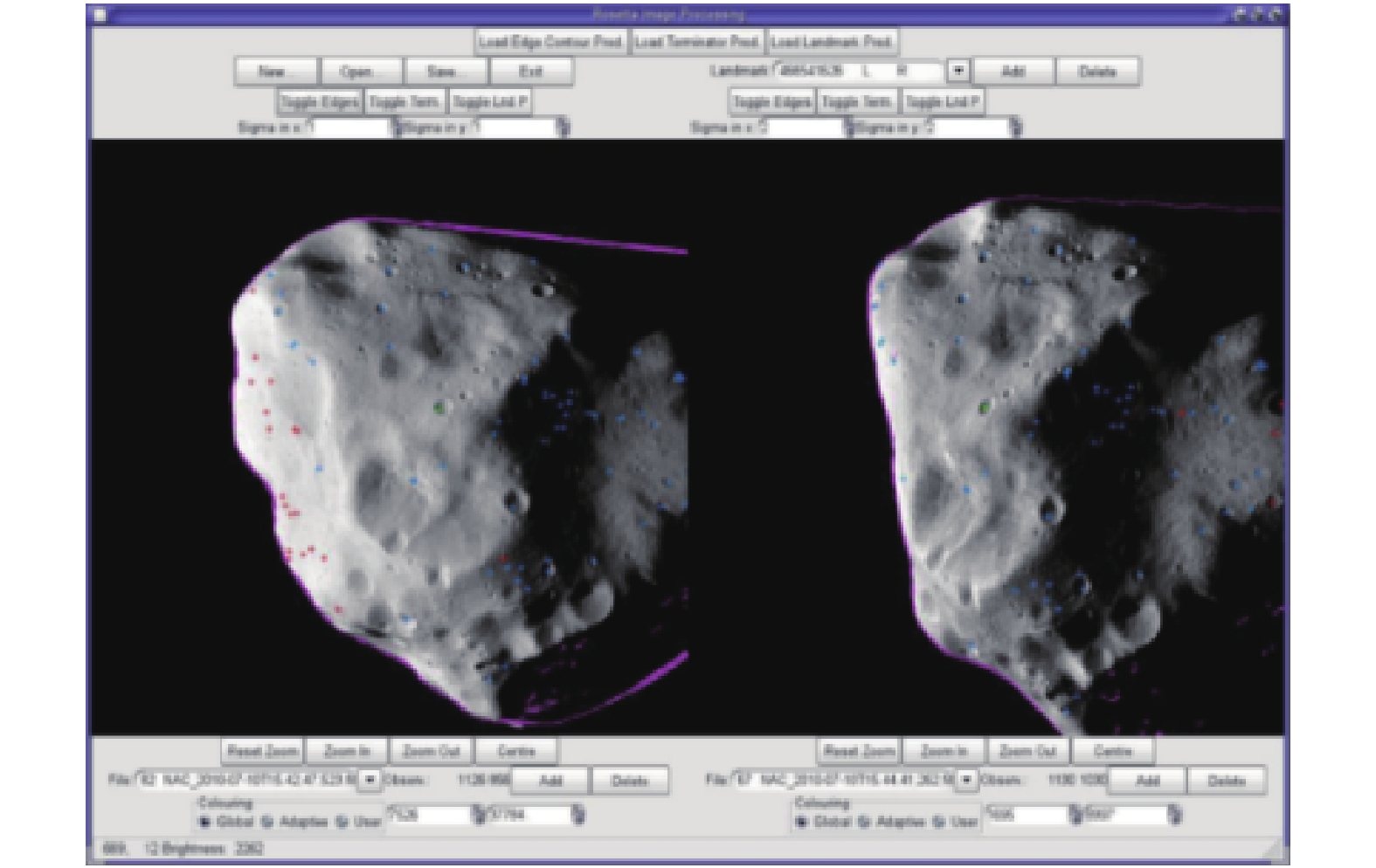
欧洲航天局的Rosetta于2014年8月抵达67P/Churyumov-Gerasimenko彗星,并于2014年11月部署了“菲莱”号着陆器。Rosetta的导航使用平方根信息滤波器[12],处理无线电跟踪和星载相机拍摄的表面陆标观测[13]。最初使用手动选择陆标[14],并使用GUI来辅助该过程,如图1所示。最终采用了SPC技术的自动化流程,减少了地面作业的工作量[15]。
2011年7月至2012年9月期间,Dawn围绕小行星灶神星(Vesta)飞行,然后在2015年3月抵达谷神星(Ceres)附近轨道。在两个天体上,利用无线电跟踪结合光学导航来确定轨道[16],在地面使用批量最小二乘(BLS)滤波处理测量数据。除了支持实时导航操作,光学导航还用于确定灶神星的一些关键物理特性,如小行星的旋转轴、形状以及重力项。光学导航数据类型为边缘扫描(limb scans)和SPC陆标,如图2所示。当小行星充满图像中的大部分视野时,Dawn光学导航使用SPC陆标导航。
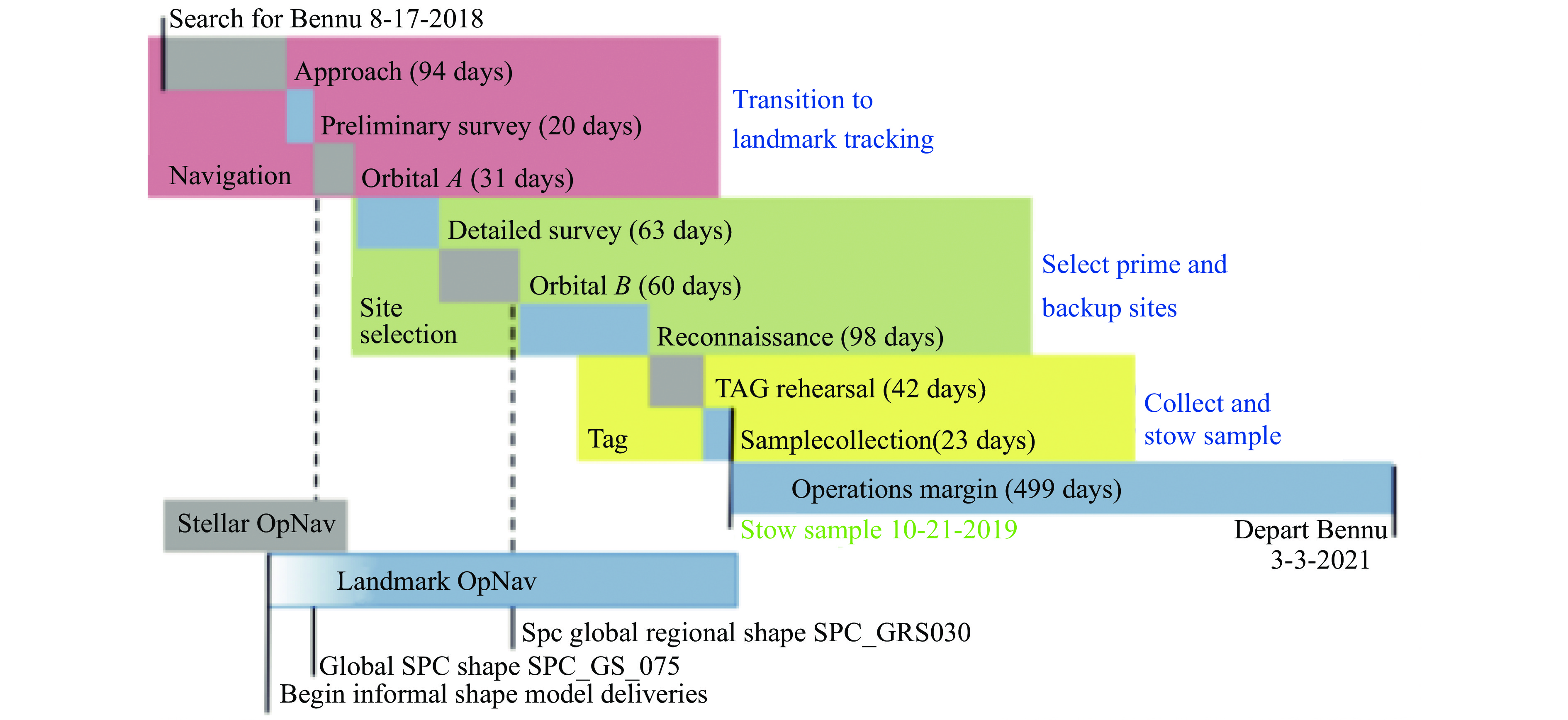
2016年9月美国发射了OSIRIS-Rex探测器,是美国宇航局第一个将小行星样本带回地球的任务。使用无线电测量和光学导航数据的组合来完成航天器的轨道确定(OD)。OSIRIS-Rex任务的光学导航使用恒星和陆标进行导航[17],如图3所示。在近距离操作中,使用SPC创建数字地形图(DTM)后,导航将从恒星导航过渡到陆标导航。导航团队专门开发了一套星载陆标导航方法,称为自然特征跟踪(NFT)[18],用于接收SPC传递的文件进行导航。
国内外众多学者也对小行星探测下降着陆光学导航进行了研究。由于陨石坑简单而独特的几何形状,可以作为导航陆标进行提取、匹配和跟踪,实现探测器的自主导航[19];Yang等人利用椭圆来拟合陨石坑,并结合事先确定的探测器的姿态信息对探测器的位置进行估计[20]。但目标着陆点附近可能并不存在明显的陨石坑、岩石等陆标,而且利用椭圆进行特征匹配,容易造成误匹配。Gaskell研究了用于探测器的SPC陆标自主导航,并开发了用于小行星下降着陆导航的仿真环境[21]。利用SPC陆标进行导航的方法运用于众多小行星探测任务,不断发展成熟。Miso等人以MUSES-C探测任务为背景[22],发展了通过采用对目标天体表面特征进行识别和跟踪来确定着陆探测器相对位置和姿态的一种自主光学导航算法。Andrew等人利用特征点跟踪算法进行着陆段的导航[23],计算出相邻图像之间的相对位置变化,但不能确定探测器在固联坐标系中的绝对位置。Johnson等人[24]提出利用对小行星表面序列图像特征跟踪的相对运动估计结合陆标识别的绝对位置估计,来保证探测器着陆过程中的精确导航。利用计算机视觉技术识别、跟踪特征,往往采用序列图像特征跟踪的方法,需要图像间具有较大相似性,只能计算出图像间相对运动,但可以与绝对位置估计相结合。
黄翔宇等[25]提出了利用探测器上的光学导航相机测量三个预先选定特征点的图像坐标,结合激光测距仪测量探测器到特征的距离,由此得出探测器的相对位置。崔平远等[26]提出了利用光学导航相机结合三个激光测距仪跟踪目标着陆点的导航方案,确定探测器相对目标天体的位置和姿态。田阳[27]等提出了在导航序列图像跟踪特征,结合激光测距仪给出的探测器到表面的距离信息,求得航天器的相对位姿。邵巍等[28]提出了一种利用PCA-SIFT算法提取的尺度不变特征点作为导航陆标,并结合三维模型以及拼接虚拟地图进行探测器自主着陆的导航算法。李爽、崔平远[29]提出了两种基于非线性最小二乘(NLS)和扩展卡尔曼滤波(EKF)的陆标跟踪导航算法。国内研究较为薄弱,缺乏实际探测任务支撑,需要继续深入。
随着光学导航技术和自主导航技术发展,航天器依靠光学导航进行深空自主导航的能力逐渐提高。在着陆过程当中,探测器相对目标天体的距离很近,能够清晰地观测天体表面。在这种情况下,采用导航相机对天体表面的陆标进行识别跟踪,得到高精度的导航定位,为最终着陆做准备。部分小行星探测任务下降着陆光学导航,如表1所示,大多都是地形相对导航,需要三维地图或激光测距仪数据。
表 1 部分小行星探测光学导航简介
Table 1. Introduction to some asteroid exploration optical navigation
Detector Detecting target Navigation landmark Onboard NEAR Eros(landing) Crater No Rosetta 67P(landing) SPC landmark No Hayabusa Itokawa (sampling return) Surface feature, artificial landmark No Dawn Vesta, Ceres(orbiting) SPC landmark No OSIRIS-Rex Bennu (sampling return) SPC landmark Yes -
鉴于美国国家航空航天局对月球前哨站和月球登陆的兴趣,Draper[30]长期以来一直使用TRN来解决月球导航问题。自主着陆和避障技术(ALHAT)的需求也促使了对TRN的研究。地形相对导航的目的是通过提供相对于已知表面特征的位置或方位测量来增强惯性导航。通过确定足够的已知三维位置特征及其对应图像像素位置,就可以计算航天器的位置和姿态,或者更新导航滤波器。
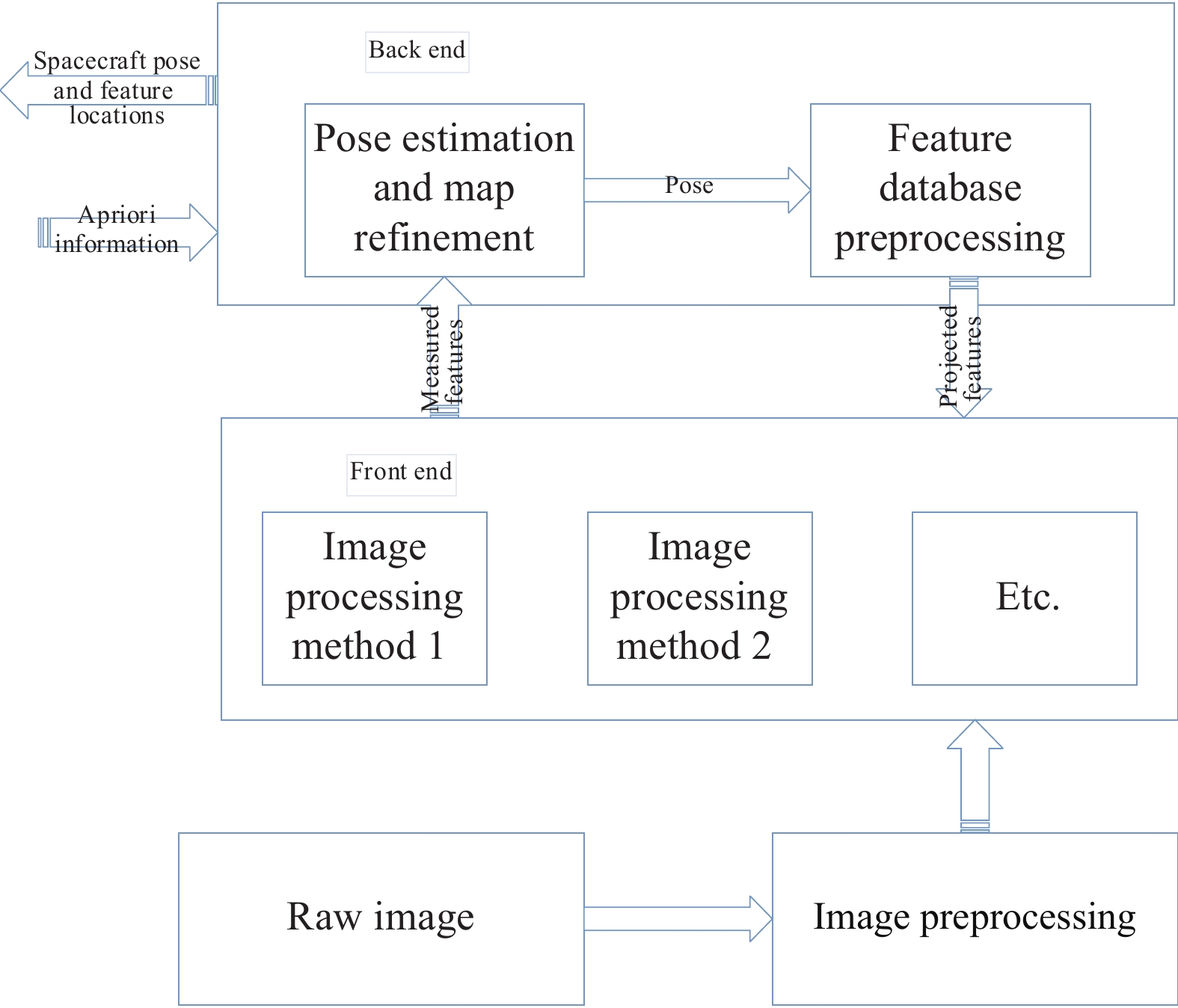
TRN算法的形式通常如图4所示[31]。经过一些图像预处理(如失真补偿)后,图像处理算法识别图像中的特征(前端算法),并将特征发送到位姿估计算法(后端算法)。3D特征位置的集合构成特征地图。通常,后端算法还通过估计3D位置中的误差来改进地图。为了减少前端算法的搜索空间,特征数据库处理算法可以预测当前图像应当出现的特征,以及特征在图像中的投影。
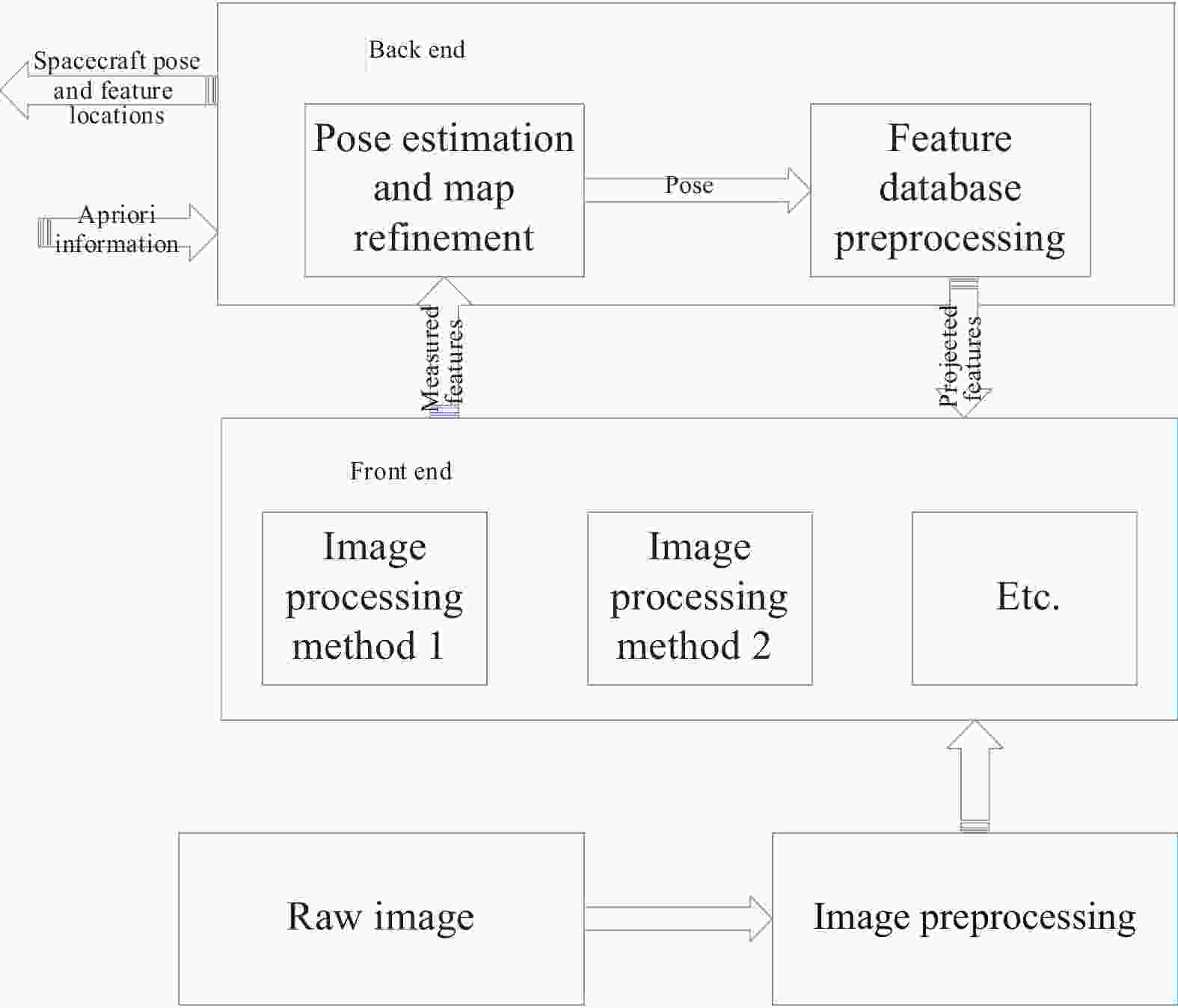
图 4 地形相对导航算法框图
Figure 4. Block diagram of terrain relative navigation algorithm
TRN算法主要有三种类型:模板匹配、模式匹配和描述符匹配[31]。
模板由一幅小图像(像素值矩阵)组成,导航之前在地面定义。模板可以预先渲染,也可以星载渲染。预先渲染模板通常在地面上进行,导航时将模板变形到当前相机位姿下。星载渲染的模板通常使用目标的3D模型、航天器先验位姿和光照条件,直接渲染到当前相机位姿下。使用归一化互相关(NCC)等算法,将模板图像与导航图像进行匹配。预渲染模板算法的例子是基于图像的绝对定位(IBAL)[32]算法,星载渲染的例子是NFT。与预渲染方法相比,星载渲染模板的尺度、方向以及照明条件更准确,提高了匹配准确率。但受星上处理时间限制,可以渲染的模板数量有限;导航之前,需要对模板进行测试和验证,确保有限数量的模板能够成功进行相关匹配。
在图像中检测已知位置的特征,使用SIFT或ORB等描述符来定义已知的特征,将特征描述符和位置存储在数据库中,然后将数据库中可见的特征与相机图像中检测到的所有特征进行匹配。描述符匹配的一个优点是,可以很容易地利用OpenCV的特征检测器自动选择已知的特性。然而,当匹配特征过多时,导致误匹配增多,并且需要大量计算。
模式匹配算法检测场景的一些固有属性,主要是陨石坑。传统的图像处理方法是通过检测图像中的基本形状来实现的,但近年来机器学习方法在这一领域占据了主导地位。模式匹配方法的一个主要优点是,每个特征通常由几个参数描述,可以满足特征在更大范围相机指向和光照条件下的匹配。缺点在于天体中陨石坑的数量与分布可能不恰当(小行星中可能没有陨石坑),陨石坑的属性难定义及拟合较难。
用于位置估计的陨石坑模式匹配[33]—在着陆过程中,下降图像中检测到陨石坑,并与数据库中的陨石坑进行匹配。这种定位方法已经通过来自月球、火星和小行星的图像进行了测试。尺度不变特征变换(SIFT)[34]—与上面的陨石坑方法不同之处是使用了SIFT特征。SIFT特征非常普遍,可以从没有陨石坑的图像中提取出来,但降低了对光照和视角的敏感性。图像与地图相关位置估计[35]—将下降图像校正到与地图相同的尺度和方向,并将下降图像的一个面片与着陆点地图图像相关。这种方法已经用于引导巡航导弹,并且JPL已经开发并测试了一种适合月球和火星着陆的方法。
TRN方法可以识别表面特征,并将其与预先编译的数据库进行比较,优点是可以生成相对于表面的完整的六自由度位置和方向,但增加了自动查找可靠表面特征的复杂性。对于任何TRN方法,获得的位置精度受到目标的距离、特征库的精度(存储特征的三维位置)、像素的角分辨率、使用的特征数量和图像中特征的散布影响。对于小行星探测,基于表面已知三维位置特征的地形相对导航在多次任务中使用,验证了其可靠性。
-
对于小行星探测下降着陆,光学导航的两个最主要关键技术:一是以SPC为代表的高精度形状建模,二是陆标导航。因此,需要一个专门的测绘阶段,用于近距离拍摄图像,生成形状模型。另外在进行陆标导航之前,需要利用测绘阶段拍摄图像和构建的地形模型生成陆标。多次小行星任务都包含了这几个技术,验证了重要性。
-
导航之前,对小行星的了解较少或不准确,因此需要进行仔细的观测,增加对小行星的认识。测绘阶段主要有两个目标:获取图像用于小行星的三维重建;用于确定小行星物理性质。
针对采用SPC进行三维重建的要求,Pesce V[36]、Palmer[37]以及Raymond等人[38]提出了所需角度约束条件,一个参考示例如表2所示,用于指导测绘轨道设计。入射角i为入射光线与表面法向量的夹角,反射角e为反射光线与表面法向量的夹角,相位角ɑ为入射光线与反射光线夹角。此外,科学任务和确定小行星性质的需要,对测绘阶段也提出了相应要求。
表 2 采用SPC的测绘条件
Table 2. Mapping conditions using SPC
Angle parameter SPC suitable angle/ (°) Phase angle ɑ 20-90 Incidence angle i 10-60 Reflection angle e 20-60 Rosetta接近彗星时,实施了初始特征阶段进行光学观测。初始特征阶段的主要目标如下:识别彗星表面的陆标并估计它们的位置;确定彗星的旋转状态;确定彗星的形状;获得对引力势的初步估计[39]。为了实现上述目标,需要在各种不同的观测条件下(观测位置、照明条件)获得尽可能高分辨率的全局覆盖图像。
Dawn任务中,Vesta的地形模型将使用极地勘测轨道的数据。极地高海拔测绘轨道(HAMO-1和HAMO-2)的平均半径为950 km。多角度成像的主要阶段发生在两个HAMO阶段;在每个HAMO子阶段,计划多个具有重叠图像的完整全局测绘,如图5所示。低空测绘轨道(LAMO)主要的科学目标是测量矿物和元素的丰度,另一个作用是获取重力场数据。
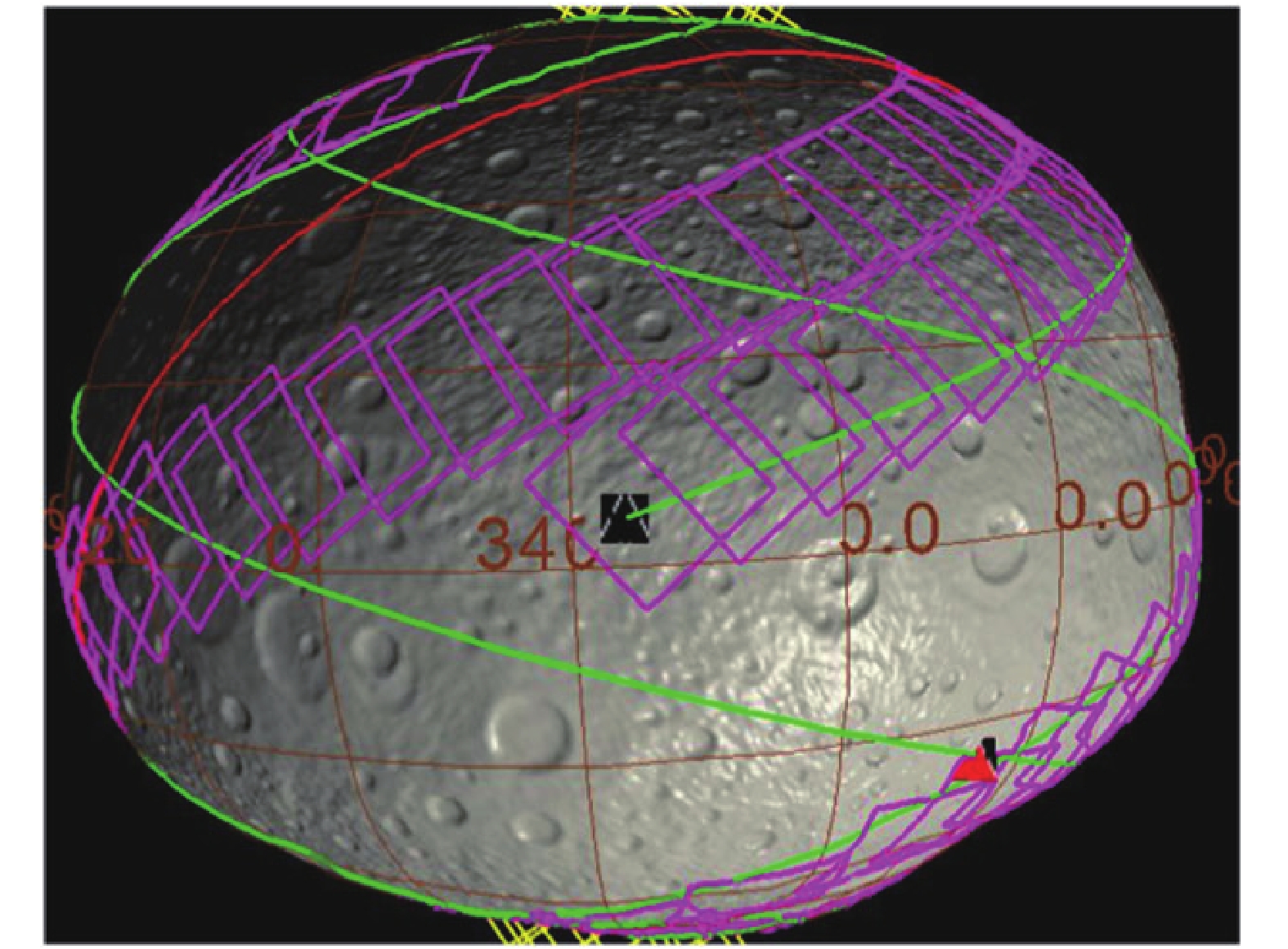
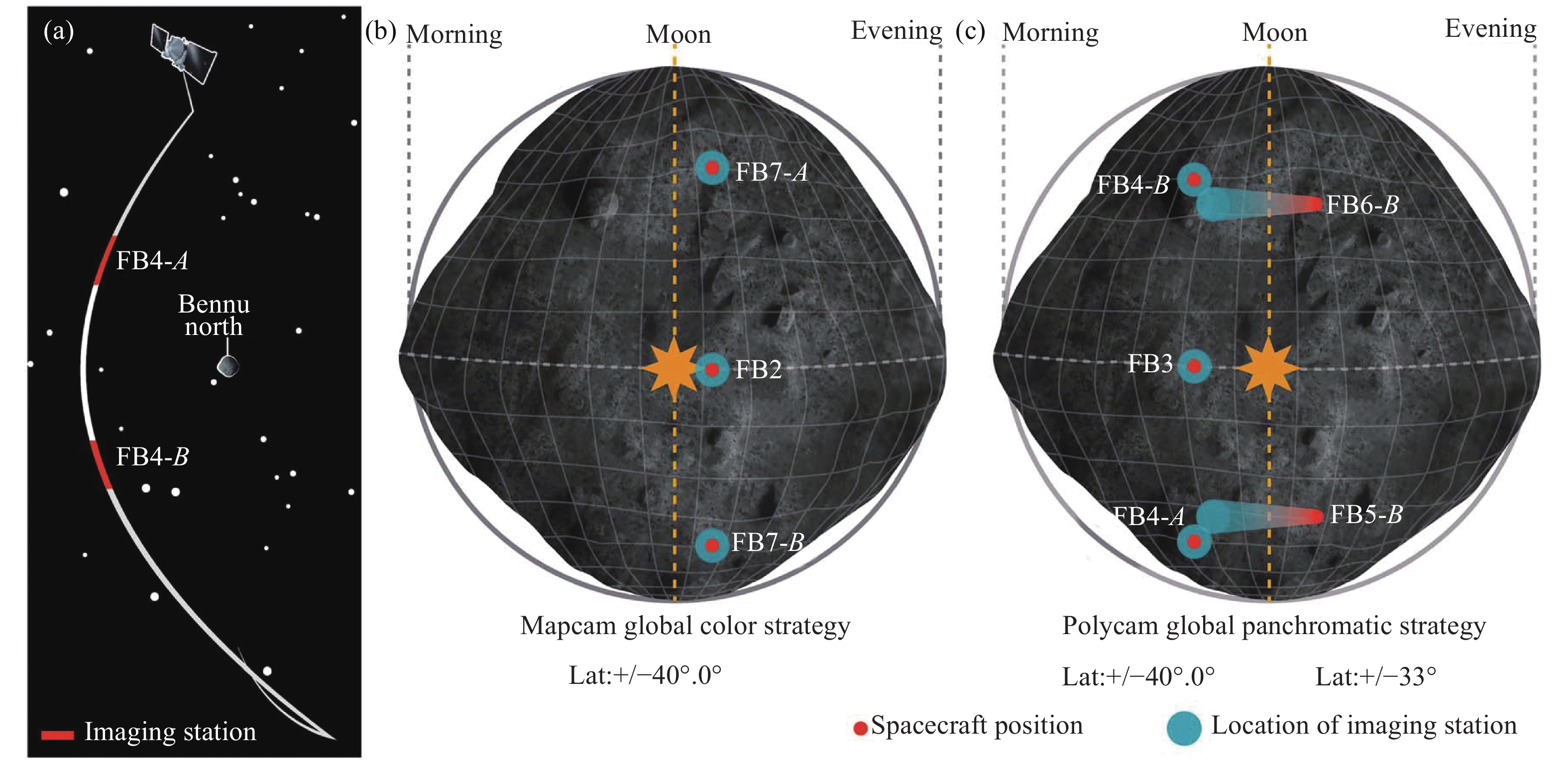
OSIRIS-Rex任务设计了复杂的相机观测计划,分为四个观测阶段。接近段:不断接近小行星过程中进行观测,最终建立75cm 分辨率的形状模型,建立Bennu 的坐标系,估计Bennu 的旋转状态。初始勘察阶段:在7 km距离对Bennu观测,得到与接近段不同观测角度的Bennu的75 cm分辨率的形状模型、光度学模型、质量估计以及多光谱观测模型。飞行过程包括北极—赤道—南极三个阶段。轨道A阶段:在轨道A的最后阶段,距离约为1 km处,获取两极的高分辨率图像。全局详细勘察[40]:在3~5 km进行观测,由多次成像构成全局勘察,如图6所示。得到彩色图像,8 cm分辨率的自然特征模型,35 cm分辨率的SPC形状模型。全局详细勘察还包括赤道区域详细勘测,用于安全性判断、可采样性判断、科学价值判断、采样区域选择及备份采样区域选择。
-
形状模型具有两个作用:用于陆标导航和用于确定小行星物理性质。天体的数字地形模型可以是整个天体完全封闭的三维形状,也可以是天体的一小部分。对于小行星三维重建技术,有光变曲线反演方法、侧影轮廓方法等。采用阴影恢复形状与立体视觉(stereo)结合[41],可以得到高精度模型。其中,最常用SPC[42]和立体摄影测量(Stereophotogrammetry)[43]两种建模技术,最成功的是属于Gaskell的SPC,它是两种形状建模技术的组合:立体摄影测量和photoclinometry(sfs)。立体摄影测量用于关联固定控制点的两个或多个已知位置和指向的图像,photoclinometry用于从图像的明暗信息生成形状。SPC方法在小行星任务中有丰富的应用,如Hayabusa[44]、Rosetta[45]、Dawn[46]等。SPC同样适用于月球这样的大行星,只是测绘任务的规模大得多。
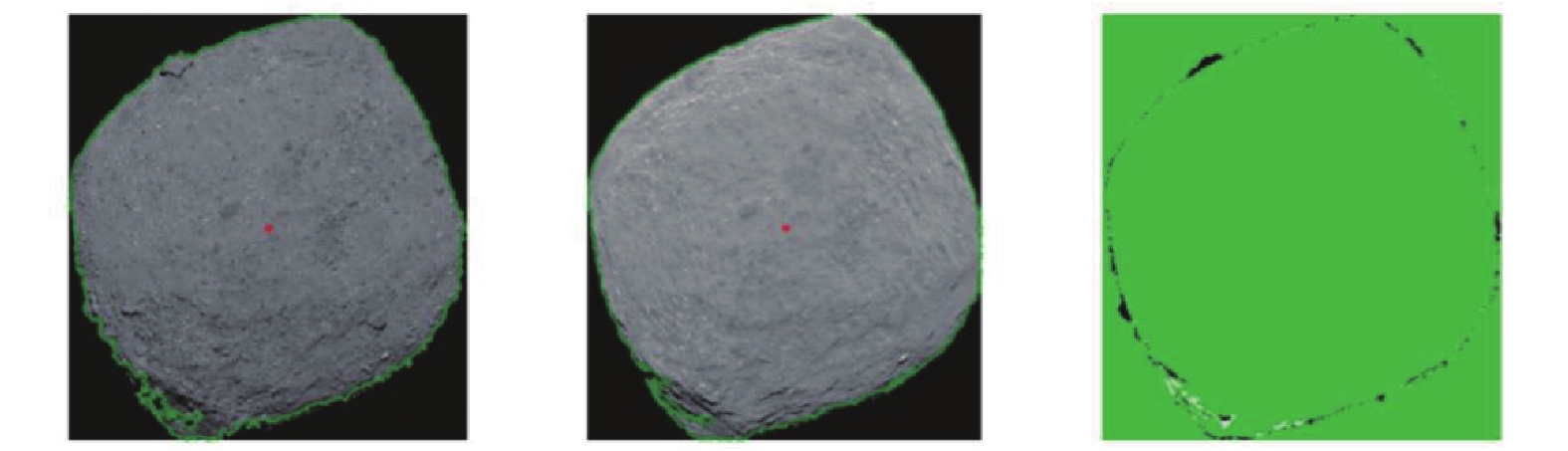
表面定义的控制点,标出面片 (maplet/L-map)的中心(即陆标点),地图上的面片被镶嵌在天体表面。SPC在天体表面的一个给定点上,从至少三张不同几何和光照条件的图像,在最小二乘意义上求解两个方向的坡度和反照率[47]。一旦计算出每个面片点的坡度,就可以将它们进行积分,得到地形高度[48],从而得到天体表面的数字地形地图(DTM)。将局部DTM组合即可得到全局模型。图7展示了利用SPC恢复的Bennu形状模型,从左至右依次为真值模型、恢复模型与模型误差。
陆标与L-map的结合带来了许多优势:(1) L-map允许使用大量不同分辨率、入射和反射角度的图像;(2) 和相邻的L-map使用互相关技术在表面上配准图像,将相同的表面部分相互重叠,使控制点定位精度大大提高,增加了用于估计航天器位置、相机指向和陆标位置的全局解决方案的约束;(3)在新图像中自动搜索和识别现有的陆标,允许快速导航周转;(4)合成L-maps为全球地形模型,改善新图像的表面配准。
SPC的优点,既有立体几何原理的多视角成像,也有光度学的明暗信息,使得重建模型精度高;三维重建与导航耦合一体,既可以求解陆标的位置,也可以求解航天器的位置,两者迭代求解提高重建模型精度和导航精度;随着拍摄图像分辨率提升,重建模型分辨率可以不断提高,模型分辨率一般为源图像的3~5倍。SPC的缺点是,算法复杂,计算量大,需要数据多,存储量大,难以星上运行;阴影区域重建效果较差;高度约束会平滑陡峭的地形。对于小行星探测任务,SPC模型精度远高于其他方法,如在OSIRIS-Rex任务期间,SPC可获得小行星35~75 cm分辨率的形状模型[50]。因此成为不断发展成熟且应用广泛的方法。
-
对于近距离操作,特别是当天体尺寸充满相机视野时,陆标是更合适的导航数据,远胜于恒星。在导航过程中,航天器识别几个陆标就可以计算出当前的位姿。对于小行星来说,陆标[51]有三种来源:手动或自动提取陨石坑等自然表面特征[52- 53],如NEAR任务;利用计算机视觉技术提取SIFT或SURF[54]等表面图像特征;广义的表面特征,与陨石坑这种表面特征相比不需要突出的自然特征,通常使用SPC生成的面片[55],如Dawn、OSIRIS-Rex。实际上陆标就是天体表面的特征,一些文献称为特征,一些文献又称为陆标。
由于参考地图的分辨率有限,陆标存在位置误差。并且着陆器越接近表面,可以观测到的已知坐标的陆标越少。因此,仅根据已知坐标的陆标导航无法满足精确着陆的要求,可以引入未知坐标陆标进行导航。当然构建局部高分辨率地图是另一种解决方法。许多具有未知坐标的陆标可以从序列下降图像中提取出来。例如一种使用未知陆标的多状态约束卡尔曼滤波(multi-state constraint Kalman filter, MSCKF)方法,在序列图像中跟踪陆标,通过最小二乘算法最小化估计陆标的位置[56]。
在着陆过程中,可以观察到两种类型的陆标:已知坐标的陆标和未知坐标的陆标。一些学者提出[57-58],具有已知坐标的陆标称为地图陆标(Mapped Landmark,ML),陆标坐标可以通过下降图像和表面地图之间的匹配获得;可以在一系列下降图像中跟踪的陆标,其坐标事先不知道,称为机会陆标(Opportunistic Landmark, OL),因其大多为图像特征亦可称为机会特征(Opportunistic Feature,OF)。
-
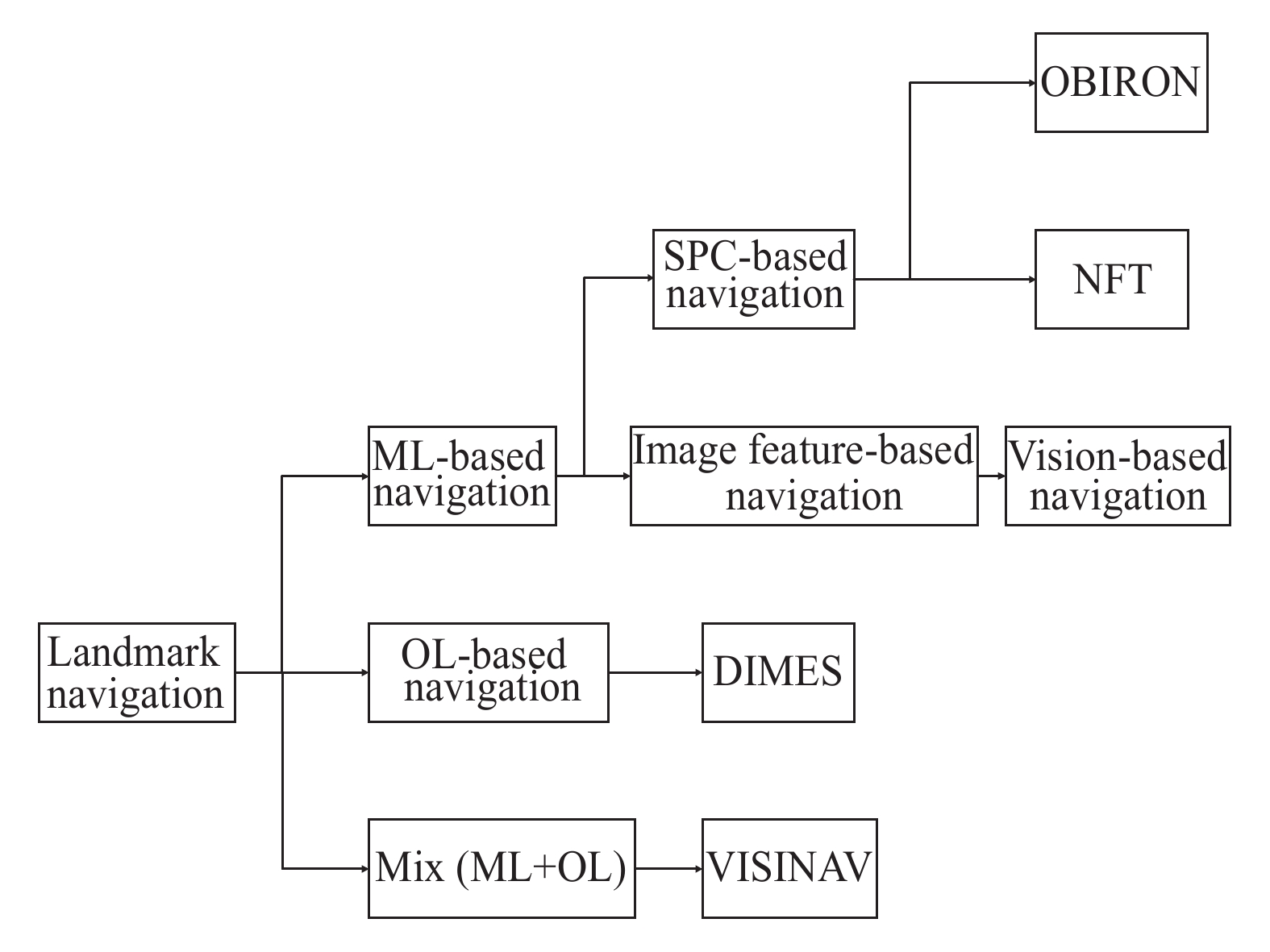
根据陆标类型可分为三类导航方法,如图8所示。第一类是基于ML的导航方法,由于陆标的三维位置是已知的,在一张图像中识别几个陆标就足以确定航天器相对于天体中心的绝对位姿。这类系统的一个例子是月球上的陨石坑识别导航。第二类是基于OL的导航方法,通过跟踪图像特征,计算相邻图像之间的相对运动,而不知道特征的绝对位置。这类系统的一个例子是DIMES[59]系统,仅利用图像间的机会陆标跟踪,在火星探测器着陆期间估计水平速度。第三类是基于ML和OL两种混合的导航方法。这类系统的一个例子是视觉辅助惯性导航(VISINAV)[60],利用扩展卡尔曼滤波器(EKF),结合地图陆标、机会陆标和惯性测量,在整个下降过程中稳健确定航天器位置和姿态。
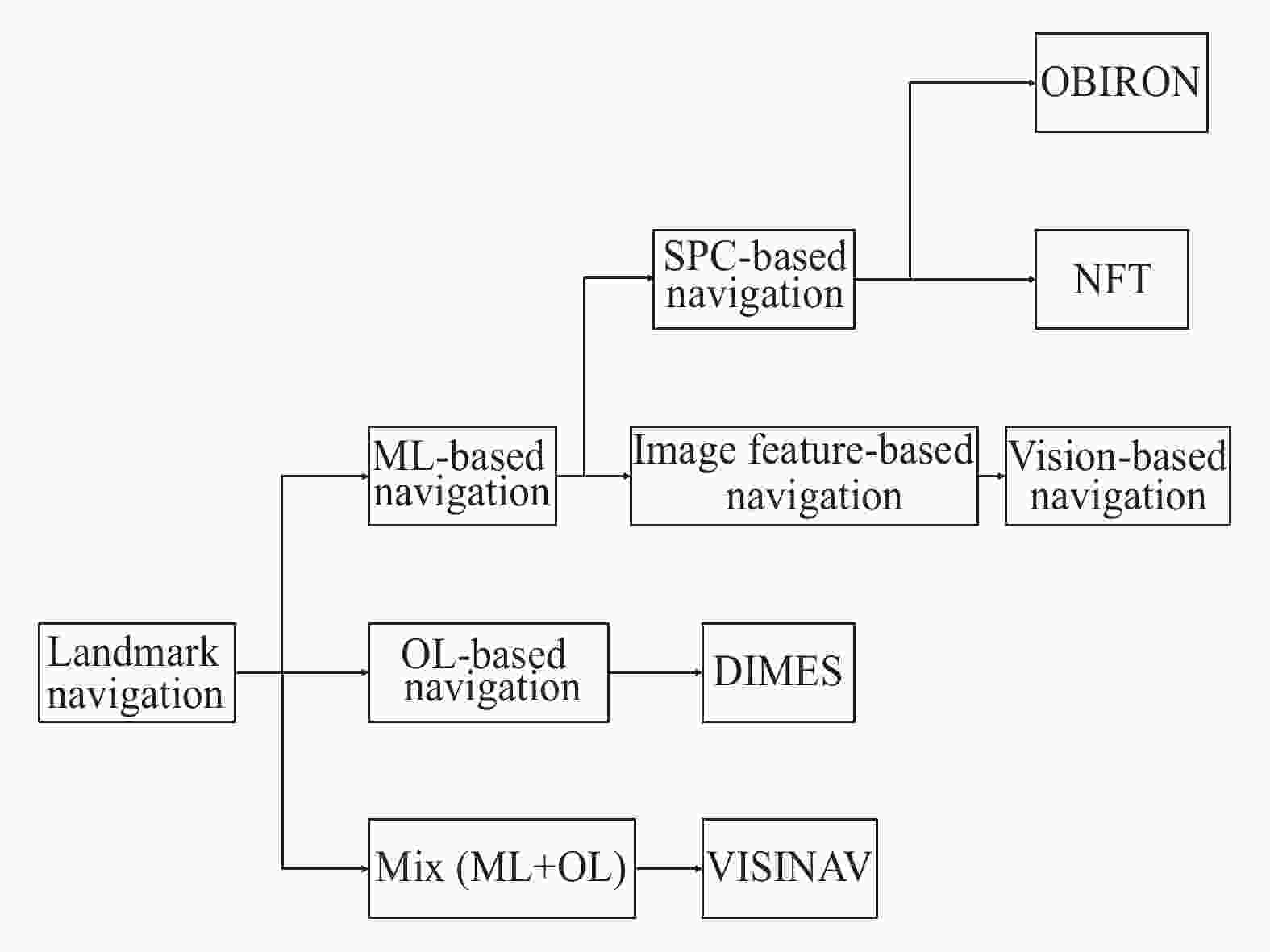
图 8 陆标导航分类
Figure 8. Landmark navigation classification
基于OL的导航,可以进行连续估计,但没有给出相对于天体中心的绝对位置,存在累计误差,需要图像间具有较大相似性,而小行星环境复杂,很难保证图像间的相似性,故不适合小行星探测下降着陆。ML与OL混合的方法,将机会陆标跟踪的相对位置的连续更新与地图陆标识别的绝对位置的间断更新相结合,可以得到航天器相对于天体中心的绝对位置的连续估计,消除位置漂移,提高着陆位置的精度,但该方法过于复杂。基于ML的导航方法给出了相对于天体的绝对位置,精度较高,但是需要三维地图或高度计等提供陆标的三维位置数据。基于ML的陆标导航实际上就是一种地形相对导航,采用陨石坑等自然突出陆标对应于TRN的模式匹配,采用图像特征陆标对应于TRN的描述符匹配,采用SPC陆标对应于TRN的模板匹配。因此基于ML的导航方法是小行星探测的首选,以往的小行星探测任务也多采用基于ML的导航方法。
-
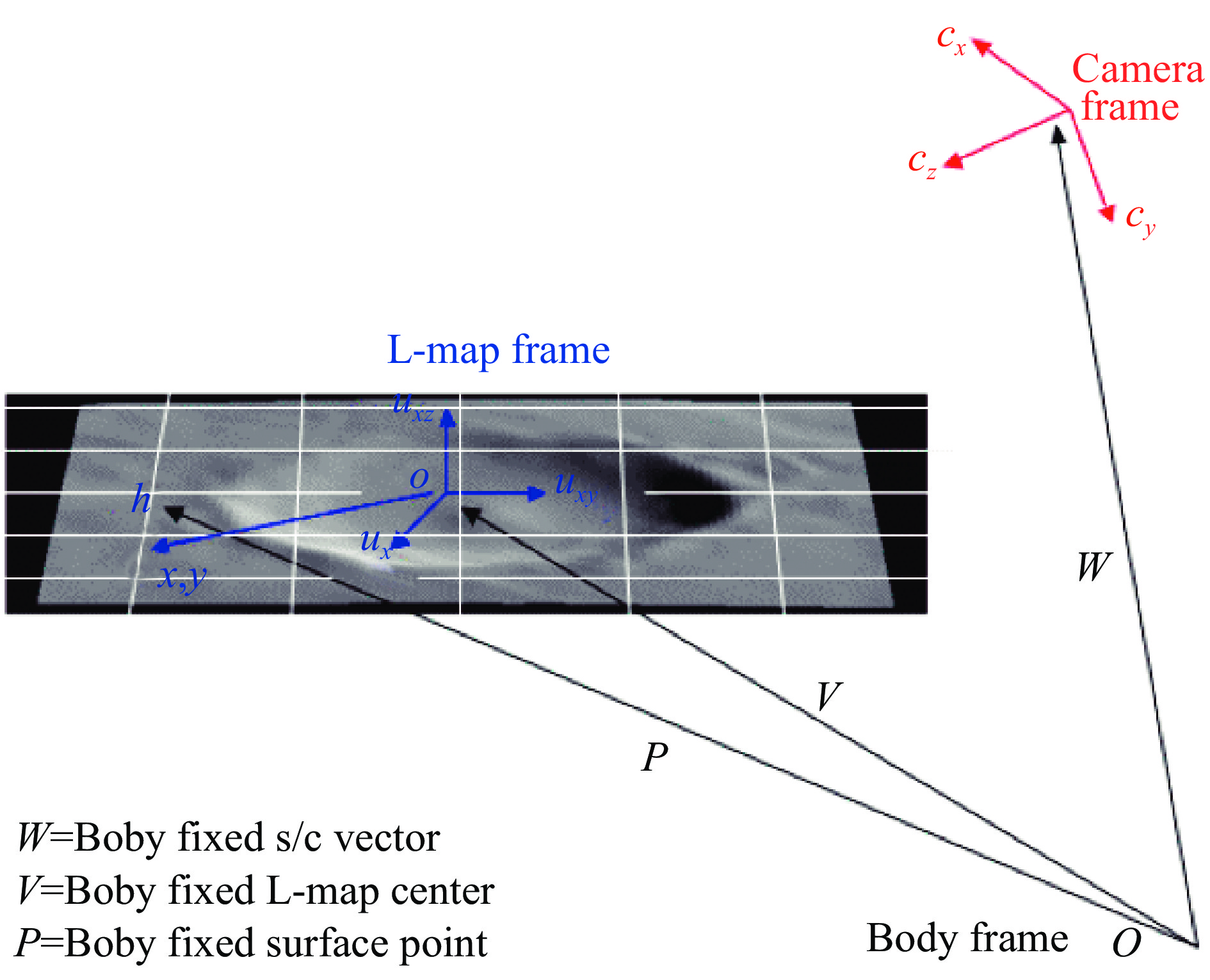
SPC陆标是一个广义的表面特征,如图9所示[61],不需要明显的特征。首先,确定导航图像中的陆标,再利用先验航天器位姿和光照条件对陆标地形图进行渲染生成预测图像。然后,将陆标预测图像与导航图像相关匹配,并由此确定导航图像上陆标的三维位置。最后,将陆标三维位置与对应图像二维位置输入导航滤波器,以进一步完善航天器位姿估计。对于一张导航图像,至少需要识别三个陆标才能确定航天器位姿。得益于SPC地形模型的高精度,基于SPC陆标导航精度也很高,但其对地形模型依赖较强,同时需要渲染预测图像。
Bhaskaran等人[62]提出的OBIRON(On-Board Image Registration for Optical Navigation)系统,是一种基于SPC的技术。OBIRON的第一阶段是使用SPC建立一个详细的天体地形模型,生成陆标。然后,对陆标的预测图像和观测图像进行相关匹配。每个陆标的图像预测位置和实际位置之间的差异为航天器位姿的最小二乘求解提供输入。得到的航天器位姿又可以用来进一步估计陆标的位置,进行迭代求解。在航天器不断接近小行星的过程中,可以获得更高分辨率的图像,重复这个迭代过程,不断提高导航精度和陆标位置精度。OBIRON通过NEAR和MUSES-C[63]小行星任务的图像进行了地面测试,在Dawn任务中作为地面光学导航方法。
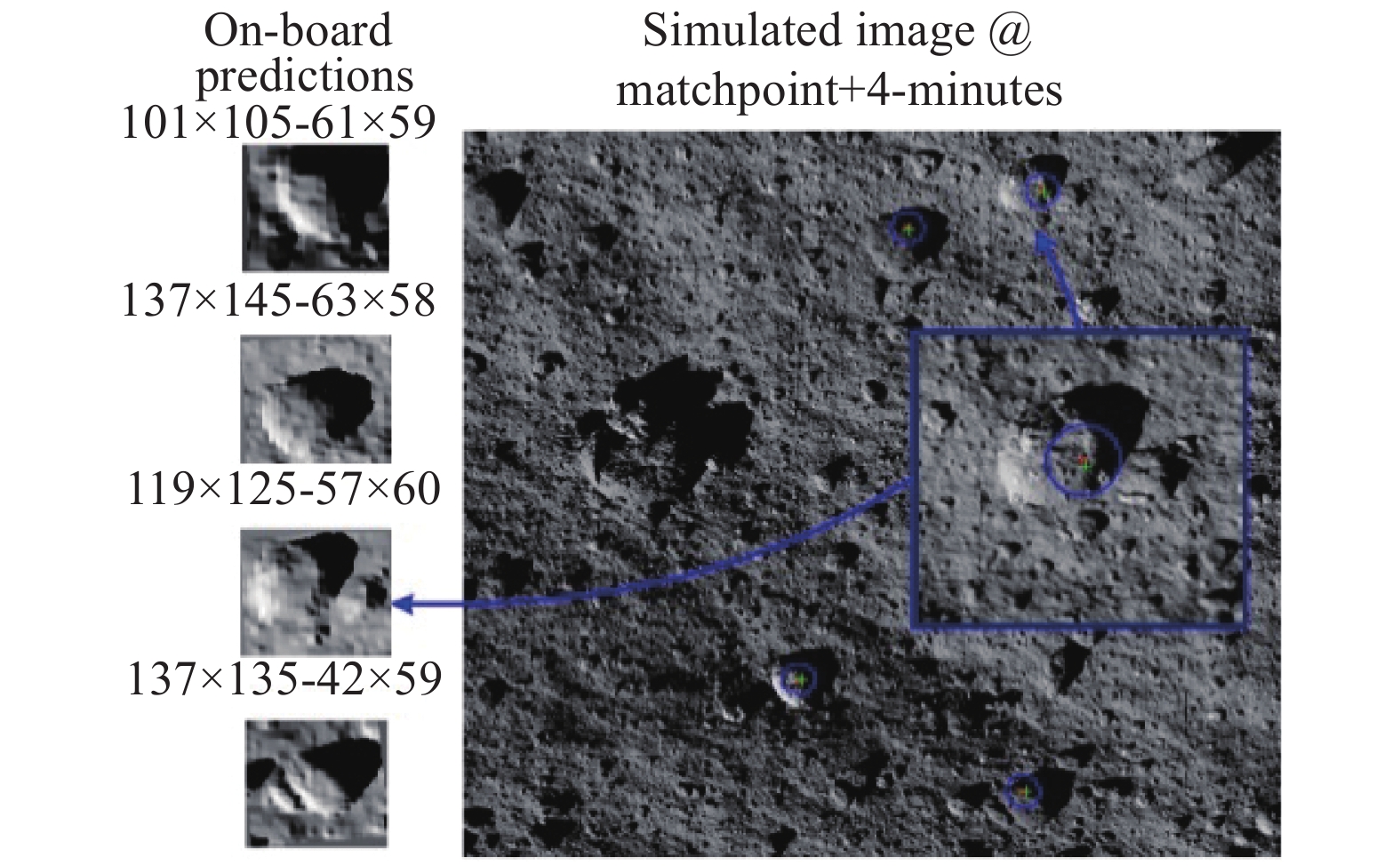
OSIRIS-REx任务基于SPC陆标的导航方法称为自然特征跟踪(NFT),由Lockheed Martin(LM)[64]公司专门为这次任务开发的。NFT是一种星载光学导航方法,根据陆标导航库,NFT预测导航图像中可能观测到哪些陆标,实时渲染这些陆标的预测图像,并将预测图像与实际导航图像进行归一化互相关匹配,如图10所示。然后,根据预测图像与导航图像之间的测量残差,利用卡尔曼滤波器更新航天器状态。NFT的DTM计划使用以下两种手段之一创建:激光测高仪(OLA)或SPC[65]。与OLA相比,SPC的优点是包含反照率数据、在相同距离下具有更高模型分辨率;缺点是可能会平滑陡峭地形、需要更多相机角度和太阳角度的数据收集。
NFT和OBIRON是两种非常相似的导航系统,但它们又有所区别。NFT是专注于导航方法,它使用事先构建好的地形模型(导航陆标库)。而OBIRON利用SPC方法将地形重建和陆标导航功能集成为一体,重建和导航是一个迭代过程,可以不断提升地形模型精度和导航精度。NFT使用的地形模型可以使用光学影像重构(比如SPC方法),也可以使用激光三维点云数据重构,而OBIRON利用SPC方法从光学影像中完成地形重构。此外,NFT可以星上自主运行;而受限于SPC的复杂性,OBIRON难以完全星上实现,现有任务都是地面进行。
目前任务运行的传统的SPC陆标导航方法,均以SPC内置的光度模型函数进行渲染图像。该函数称为“Lunar-Lambert”[66]函数,是Lambert和Lommel-Seeliger反射函数的组合。预测图像的尺度与地形模型一致,需要将导航图像缩放到渲染的预测图像尺度,然后进行相关匹配。而Wright[67]、Gnam[68]等人采用光线跟踪方法渲染预测图像,将预测图像直接渲染到导航图像尺度,提高相关匹配稳健性,目前还处于研究阶段,实验已达到传统SPC方法效果。
-
已知导航陆标还可以选取为图像特征,比如SIFT、Harris。利用相邻图像特征跟踪获取特征的图像2D位置,结合地形图、高度计等方式构建的导航库数据获取特征3D位置,再进行导航滤波解算。这种方式解决了相对位置导航的误差累积问题,但当两帧图像差异较大时,图像间的重叠率下降,特征匹配会出现较大误匹配。欧洲航天局基于火卫一样本返回任务提出了适用于小行星和小卫星的天体相对导航方法。该基于视觉的导航[69]系统的核心是在下降着陆阶段将绝对位置导航技术(称为增强相对导航,ERN)与采用KLT算法的相对位置导航方法相结合。为航天器提供了高度自主能力,能在一个复杂的三体动态系统中精确着陆。
此外,除了进行图像间的特征识别、跟踪外,还可以直接将图像中的特征与导航库的特征进行匹配。直接与导航库进行匹配的方法是一种绝对位置导航,不包含相对位置导航。同样,这种方法也存在鲁棒性的问题,环境(光照)变化较大时图像特征与导航库之间会出现较大误匹配。
-
以往任务的经验表明,标准的地面导航技术可以实现大型小行星(Eros)数百米的着陆精度和小型小行星(Itokawa)数十米的着陆精度。对于更小的小行星探测着陆任务,这些精度是不够的。为了获得更高的精度,地面导航必须通过星载自主导航来增强。从最初的陨石坑跟踪到广义表面陆标跟踪,陆标导航从最初的地面导航逐渐过渡到星上导航,逐渐发展为适用于小行星探测近距离操作的光学导航。而在众多导航方法之中,基于SPC的陆标导航经过多次探测任务不断发展改进,可以达到米级着陆精度,在未来的小行星探测中会大显身手。未来的光学导航方法发展应当着眼于更高导航精度、更高自主能力、更高实时性。
目前可用于目标天体周围的光学导航,都严重依赖于天体周围环境相关模型。这些模型的近似性和复杂性导致了位置上的不确定性,随着时间的推移,不确定性可能会加剧[70]。因此必须保持警惕进行监督,卷积神经网络可以通过将位置确定问题与底层动态分离解决这个问题。目前相关研究较少,Furfaro和Law[71]提出了一种利用极限学习机(ELM)神经网络框架的自主导航方法。基于机器学习的光学导航将是另一个研究方向。
国外小行星探测下降着陆的光学导航已经不断发展成熟,而且一些方法对于大行星也适用;但国内的研究还较薄弱,需要深入研究。特别是我国即将开展小行星探测任务,进行相应研究有助于我国任务开展,提供技术支持。
Overview of optical navigation for asteroid exploration descent and landing
-
摘要: 自主光学导航是小行星探测任务的一项关键技术,基于光学图像的地形相对导航方法在以往开展的小行星探测任务中得到了成功的应用。光学导航利用小行星表面的地形和反照率等特征精确建立了参考基准和导航陆标,根据实时观测图像的匹配结果给出了下降过程中精确的相对位置、姿态和速度。文中总结了小行星探测器下降着陆的光学导航技术发展现状,概述了其关键技术和发展趋势,为国内小行星探测任务提供了参考。Abstract: Autonomous optical navigation is a key technology for asteroid exploration missions. Terrain relative navigation methods based on optical images have been successfully applied in previous asteroid exploration missions. Optical navigation uses features such as the asteroid's surface topography and albedo to accurately establish reference datums and navigation landmarks, and give precise relative positions, attitudes, and velocities during descent based on the matching results of real-time observation images. The development of optical navigation technology for asteroid probe descent and landing was reviewed, and its key technologies and development trends were summarized, which provided a reference for China's asteroid exploration mission.
-
Key words:
- optical navigation /
- asteroid exploration /
- terrain relative navigation /
- landmark
-
表 1 部分小行星探测光学导航简介
Table 1. Introduction to some asteroid exploration optical navigation
Detector Detecting target Navigation landmark Onboard NEAR Eros(landing) Crater No Rosetta 67P(landing) SPC landmark No Hayabusa Itokawa (sampling return) Surface feature, artificial landmark No Dawn Vesta, Ceres(orbiting) SPC landmark No OSIRIS-Rex Bennu (sampling return) SPC landmark Yes  下载: 导出CSV
下载: 导出CSV
表 2 采用SPC的测绘条件
Table 2. Mapping conditions using SPC
Angle parameter SPC suitable angle/ (°) Phase angle ɑ 20-90 Incidence angle i 10-60 Reflection angle e 20-60
下载: 导出CSV
-
[1] Wu Weiren, Liu Wangwang, Jiang Yuping, et al. Development and enlightenment of foreign deep space exploration from the moon to the outside world [J]. Deep Space Exploration Research, 2011(3): 1−10. (in Chinese) [2] Rebordão J M. Space optical navigation techniques: an overview[C]//8th Iberoamerican Optics Meeting and 11th Latin American Meeting on Optics, Lasers, and Applications. International Society for Optics and Photonics, 2013, 8785: 87850J. [3] Bhaskaran S. Autonomous navigation for deep space missions[C]//SpaceOps 2012, 2012: 1267135. [4] Olson C. Analysis of asteroid landing capabilities using autonomous optical navigation[D]. US: University of Texas at Austin, 2009. [5] Gaskell R W. Optical navigation near small bodies[J]. Spaceflight Mechanics, 2011, 140: 1705-1717 . [6] Ye Peijian, Peng Yan. Deep Space exploration and china's deep space exploration prospects [J]. China Engineering Science, 2006, 8(10): 13−18. (in Chinese) [7] Wang Dayi, Huang Xiangyu. Overview of deep space exploration autonomous navigation and control technology [J]. Space Control Technology and Application, 2009(3): 6−12. (in Chinese) [8] Gaskell R W. Determination of landmark topography from imaging data[C]//25th Annual AAS Rocky Mountain Guidance and Control Conference, 2002. [9] Williams B G. Technical challenges and results for navigation of NEAR Shoemaker [J]. Johns Hopkins APL Technical Digest, 2002, 23(1): 34−45. [10] Kubota T, Hashimoto T, Sawai S, et al. An autonomous navigation and guidance system for MUSES-C asteroid landing [J]. Acta Astronautica, 2003, 52(2-6): 125−131. doi: 10.1016/S0094-5765(02)00147-9 [11] Takashi K, Shujiro S, Tatsuaki H, et al. Robotics and autonomous technology for asteroid sample return mission advanced robotics[C]//12th International Conference on Advanced Robotics, 2005. [12] Godard B, Budnik F, Muñoz P, et al. Orbit determination of rosetta around comet 67p/churyumov-gerasimenko[C]//25th International Symposium on Space Flight Dynamics ( ISSFD), 2015. [13] Muñoz P, Budnik F, Companys V, et al. Rosetta navigation during lander delivery phase and reconstruction of Philae descent trajectory and rebound[C]//25th International Symposium on Space Flight Dynamics ( ISSFD), 2015. [14] Lauer M, Kielbassa S, Pardo R. Optical measurements for attitude control and shape reconstruction at the Rosetta flyby of asteroid Lutetia[C]//International Symposium of Space Flight Dynamics (ISSFD), 2012. [15] de Santayana R P, Lauer M. Optical measurements for rosetta navigation near the comet[C]//25th International Symposium on Space Flight Dynamics (ISSFD), 2015. [16] Mastrodemos N, Rush B, Vaughan D, et al. Optical navigation for Dawn at Vesta[C]//21st AAS/AIAA Space Flight Mechanics Meeting, 2011. [17] Williams B G, Antreasian P G, Carranza E, et al. OSIRIS-REx flight dynamics and navigation design [J]. Space Science Reviews, 2018, 214(4): 69. [18] Olds R, May A, Mario C, et al. The application of optical based feature tracking to OSIRIS-REx asteroid sample collection[C]//American Astronautical Society Meeting, 2015: 15-114. [19] Yang C, James M. Autonomous landmark based spacecraft navigation system[C]//13th Annual AAS/AIAA Space Flight Mechanics Meeting, 2003. [20] Yang C, Johnson A E, Olson C, et al. Optical landmark detection for spacecraft navigation[C]//13th Annual AAS/AIAA Space Flight Mechanics Meeting, 2003. [21] Gaskell R. Small body simulations for navigation approach and landing[C]//Space 2005, 2015: 6813. [22] Miso T, Hashimoto T, Ninomiya K. Optical guidance for autonomous landing of spacecraft [J]. IEEE Transactions on Aerospace and Electronic Systems, 1999, 35(2): 459−473. [23] Johnson E A, Mathies H L. Precise image-based motion estimation for autonomous small body exploration[C]//Artificial Intelligence, Robotics and Automation in Space, 1999, 440: 627. [24] Johnson A E, Cheng Y, Matthies L H. Machine vision for autonomous small body navigation[C]//2000 IEEE Aerospace Conference. IEEE, 2000, 7: 661-671. [25] Huang Xiangyu, Cui Yantao, Cui Pingyuan. Research on autonomous optical navigation of small objects landed by detectors [J]. Chinese Journal of Electronics, 2003, 31(5): 659−661. (in Chinese) [26] Cui Pingyuan, Zhu Shengying, Cui Yantao. Research on autonomous optical navigation and guidance method for soft landing of small celestial body [J]. Journal of Astronautics, 2009, 30(6): 2159−2164. (in Chinese) [27] Tian Yang, Cui Pingyuan, Cui Yitao. Research on navigation guidance methods in the deep space exploration landing phase[C]//The 6th Academic Annual Meeting of the Deep Space Exploration Technology Professional Committee of the Chinese Astronautical Society and the 863 Project "Deep Space Exploration and Space Experimental Technology" Proceedings of the Symposium, 2009. (in Chinese) [28] Shao Wei, Chang Xiaohua, Cui Pingyuan, et al. Landing and navigation algorithm for small celestial bodies based on inertial navigation fusion feature matching [J]. Journal of Astronautics, 2010, 31(7): 1748−1755. (in Chinese) [29] Shuang L, Pingyuan C. Landmark tracking based autonomous navigation schemes for landing spacecraft on asteroids [J]. Acta Astronautica, 2008, 62(6-7): 391−403. doi: 10.1016/j.actaastro.2007.11.009 [30] Steiner T J, Brady T M, Hoffman J A. Graph-based terrain relative navigation with optimal landmark database selection[C]//2015 IEEE Aerospace Conference. IEEE, 2015: 1-12. [31] Steffes S R, Monterroza F, Benhacine L, et al. Optical terrain relative navigation approaches to lunar orbit, descent and landing[C]//AIAA Scitech 2019 Forum, 2019: 1178. [32] Dever C, Hamilton L, Truax R, et al. Guided-airdrop vision-based navigation[C]//24th AIAA Aerodynamic Decelerator Systems Technology Conference, 2017: 3723. [33] Cheng Y, Ansar A. Landmark based position estimation for pinpoint landing on mars[C]//Proceedings of the 2005 IEEE International conference on Robotics and Automation. IEEE, 2005: 1573-1578. [34] Johnson A E, San Martin A M. Motion estimation from laser ranging for autonomous comet landing[C]//Proceedings 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings. IEEE, 2000, 1: 132-138. [35] Carr J R, Sobek J S. Digital scene matching area correlator (DSMAC)[C]//Image Processing For Missile Guidance. International Society for Optics and Photonics, 1980, 238: 36-41. [36] Pesce V, Agha-mohammadi A, Lavagna M. Autonomous navigation & mapping of small bodies[C]//2018 IEEE Aerospace Conference. IEEE, 2018: 1-10. [37] Palmer E E, Head J N, Gaskell R W, et al. Mercator-Independent rover localization using stereophotoclinometry and panoramic images [J]. Earth and Space Science, 2016, 3(12): 488−509. doi: 10.1002/2016EA000189 [38] Raymond C A, Jaumann R, Nathues A, et al. The Dawn topography investigation [J]. Space Science Reviews, 2011, 163: 487−510. doi: 10.1007/s11214-011-9863-z [39] Herfort U, Casas C. Trajectory preparation for the approach of spacecraft Rosetta to Comet 67P/Churyumov-Gerasimenko[C]//ISSFD2015 paper, International Symposium of Space Flight Dynamics, 2015. [40] DellaGiustina D N, Bennett C A, Becker K, et al. Overcoming the challenges associated with image-based mapping of small bodies in preparation for the OSIRIS-REx mission to (101955) Bennu [J]. Earth and Space Science, 2018, 5(12): 929−949. doi: 10.1029/2018EA000382 [41] Capanna C, Jorda L, Lamy P, et al. A new 3D reconstruction method of small solar system bodies[C]//EPSC-DPS Joint Meeting 2011, 2011: 945. [42] Gaskell R W, Barnouin‐Jha O S, Scheeres D J, et al. Characterizing and navigating small bodies with imaging data [J]. Meteoritics & Planetary Science, 2008, 43(6): 1049−1061. [43] Gwinner K, Scholten F, Preusker F, et al. Topography of Mars from global mapping by HRSC high-resolution digital terrain models and orthoimages: Characteristics and performance [J]. Earth and Planetary Science Letters, 2010, 294(3-4): 506−519. doi: 10.1016/j.jpgl.2009.11.007 [44] Gaskell R, Barnouin-Jha O, Scheeres D, et al. Landmark navigation studies and target characterization in the Hayabusa encounter with Itokawa[C]//AIAA/AAS Astrodynamics Specialist Conference and Exhibit, 2006: 6660. [45] Jorda L, Lamy P L, Gaskell R W, et al. Asteroid (2867) Steins: Shape, topography and global physical properties from OSIRIS observations [J]. Icarus, 2012, 221(2): 1089−1100. doi: 10.1016/j.icarus.2012.07.035 [46] Konopliv A S, Asmar S W, Park R S, et al. The Vesta gravity field, spin pole and rotation period, landmark positions, and ephemeris from the Dawn tracking and optical data [J]. Icarus, 2014, 240: 103−117. doi: 10.1016/j.icarus.2013.09.005 [47] Gaskell R W. Automated landmark identification for spacecraft navigation[C]// AAS/AIAA Astrodynamic Specialist Conference, 2001. [48] Shoemaker M A, Wright C, Liounis A J, et al. Performance characterization of a landmark measurement system for ARRM terrain relative navigation [J]. Spacelight Mechanics, 2016, 158: 3641−3660. [49] Al Asad M M, Johnson C L, Barnoiun O S, et al. How good are our efforts? Evaluating the stereophotoclinometry (SPC)-derived shape model of asteroid Bennu[C]//Lunar and Planetary Science Conference, 2019: 50. [50] Seabrook J, Daly M G, Barnouin O S, et al. Shape model construction of Bennu using the OSIRIS-REx laser altimeter (OLA)[C]//Lunar and Planetary Science Conference, 2017: 48. [51] Olson C. Sequential estimation methods for small body optical navigation[D]. US: University of Texas, 2016. [52] Feng Junhua, Cui Yitao, Cui Pingyuan, et al. Method for detection and matching of craters on planet surface [J]. Journal of Aeronautics, 2010, 31(9): 1858−1863. (in Chinese) [53] Ding Meng, Cao Yunfeng, Wu Qingxian. Detection of craters in lunar grayscale images [J]. Journal of Applied Sciences, 2009, 27(2): 156−160. (in Chinese) [54] Juan L, Gwon L. A comparison of sift, pca-sift and surf [J]. International Journal of Signal Processing, Image Processing and Pattern Recognition, 2007, 8(3): 169−176. [55] Mastrodemos N, Rush B P, Owen W M. Optical navigation for the Rosetta mission[C]//AAS Guidance and Control Conference, 2015: 15-123. [56] Mourikis A I, Roumeliotis S I. A multi-state constraint Kalman filter for vision-aided inertial navigation[C]//Proceedings 2007 IEEE International Conference on Robotics and Automation. IEEE, 2007: 3565-3572. [57] Xu C, Wang D, Huang X. Landmark-based autonomous navigation for pinpoint planetary landing [J]. Advances in Space Research, 2016, 58(11): 2313−2327. doi: 10.1016/j.asr.2016.08.021 [58] Johnson A, Ansar A, Matthies L, et al. A general approach to terrain relative navigation for planetary landing[C]//AIAA Infotech@ Aerospace 2007 Conference and Exhibit, 2007: 2854. [59] Cheng Y, Johnson A, Matthies L. MER-DIMES: a planetary landing application of computer vision[C]//2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR'05). IEEE, 2005, 1: 806-813. [60] Mourikis A I, Trawny N, Roumeliotis S I, et al. Vision-aided inertial navigation for spacecraft entry, descent, and landing [J]. IEEE Transactions on Robotics, 2009, 25(2): 264−280. doi: 10.1109/TRO.2009.2012342 [61] Mastrodemos N, Rush B, Vaughan D, et al. Optical navigation for the dawn mission at Vesta[C]//Proceedings of the 23rd International Symposium on Space Flight Dynamics, 2012. [62] Bhaskaran S, Nandi S, Broschart S, et al. Small body landings using autonomous onboard optical navigation [J]. The Journal of the Astronautical Sciences, 2011, 58(3): 409−427. doi: 10.1007/BF03321177 [63] Gaskell R W. Landmark navigation and target characterization in a simulated Itokawa encounter[C]//2005 AAS/AIAA Astrodynamics Specialist Conference, 2005. [64] Mario C, Debrunner C. Robustness and performance impacts of optical-based feature tracking to OSIRIS-REx asteroid sample collection mission[C]//39th Annual AAS Guidance and Control Conference, 2015. [65] Lorenz D A, Olds R, May A, et al. Lessons learned from OSIRIS-Rex autonomous navigation using natural feature tracking[C]//2017 IEEE Aerospace Conference. IEEE, 2017: 1-12. [66] McEwen A S. A precise lunar photometric function[C]//Lunar and Planetary Science Conference, 1996: 27. [67] Wright C A, Van Eepoel J, Liounis A, et al. Relative terrain imaging navigation (RETINA) tool for the asteroid redirect robotic mission (ARRM)[C]//Guidance and Control Conference, 2016. [68] Gnam C, Liounis A, Ashman B, et al. A novel surface feature navigation algorithm using ray tracing[C]//2nd RPI Space Imaging Workshop, 2019. [69] Kicman P, Lisowski J, Bidaux-Sokolowski A. Vision-based navigation around small bodies[C]//Astrodynamics Network AstroNet-II, 2016: 137-149. [70] Campbell T, Furfaro R, Linares R, et al. A deep learning approach for optical autonomous planetary relative terrain navigation[C]//27th AAS/AIAA Space Flight Mechanics Meeting, 2017: 3293-3302. [71] Furfaro R, Law A M. Relative optical navigation around small bodies via extreme learning machines[C]//AAS/AIAA Astrodynamics Specialist Conference, ASC 2015, 2016: 1959-1978. -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1339
- HTML全文浏览量: 776
- 被引次数: 0

