











-
在工业领域中,机械零部件生产以及长期服役过程中,可能在其内部产生不同种类的缺陷,从而缩短其使用寿命,影响工业生产安全,故需要将上述缺陷及时检出。激光超声无损检测技术是一种结合了超声波探伤(UT)高精度特性[1]和光学系统高灵活性特性[2]的检测技术,具有非接触性和不损伤待检测样品[3]的优点,在风机叶片、发动机叶片等结构损伤检测中已经有着广泛的应用[4-5]。结构健康监测是指对工程结构的损伤识别及损伤表征的过程。将无损检测技术和结构健康监测技术结合,可以实现结构局部损伤至整体损伤的全尺度监测,从而有效的提高结构安全评估的准确性。
在各种无损检测技术中,激光超声非全波场检测技术通过检测超声波脉冲和缺陷的相互作用后的反射、透射或散射来识别缺陷,包括投捕法(Pitch-Catch)、脉冲回波法(Pulse-Echo)等进行厚度测量或样品力学性质表征。激光超声无损检测技术可通过全场波传播成像技术在目标检测区域构建全场超声波传播的时间序列图像实现缺陷可视化[6-11]。从构造的波场图像中可以直观地识别信号,包括缺陷的反射和散射信号等。通过识别超声波与缺陷相互作用(包括驻波能量[12]、波数变化[13]或波场变化[14]),可以实现缺陷可视化。例如,扫描一个面积为5 cm×5 cm的铝板,扫描间隔为1 mm,信号平均次数为100次,脉冲激光重复频率为100 Hz,需要40 min[15]。
压缩感知[16](Compressed sensing)技术利用信号稀疏特性,将信号变换到一个新的基或信号空间下,当信号在基或信号空间中的非零系数小于原信号空间的系数时,可以把这些非零系数称为原信号的稀疏表示。通过在基或信号空间上的信号重构,可重构出原信号。针对上述激光超声扫描时间长的问题,使用基于激光超声的压缩感知技术[15, 17-20]可以用较少的实测超声信号构建波场图像,从而缩短检测时间。Byeongjin Park等将二分搜索和压缩感知技术运用到表面缺陷的波场重建中,其模拟和实验的结果都表明上述方法重建的表面缺陷周围波场与高空间分辨率全场扫描的波场能较好吻合。利用上述压缩感知特性,可将实测体内缺陷反射的宽频带信号压缩,在特定的窄频带中重构信号,在窄频带中重构出的信号不但可以保留宽频带信号中缺陷反射信号,而且重构的信号更有利于识别缺陷反射信号[21]。Byeongjin Park等人的工作解决了表面缺陷定位加速的问题,但没有解决体内缺陷定位加速的问题[22]。
为了解决这一问题,文中提出了一种基于激光超声扫描的体内缺陷定位加速技术。该技术采用二分搜索和压缩感知方法来减少扫描次数和降低扫描分辨率的方式,实现体内缺陷定位的加速。首先通过二分搜索方法选择空间稀疏点。检测采用脉冲激光激发超声信号、多普勒频移测振仪(LDV)检测超声信号,通过固定激发探测距离、移动样品的扫描方式,在这些空间稀疏点实现扫查检测,获得表面波到达时间相同的超声信号。然后,使用基于小波变换的压缩感知算法将探测到的信号在特定频带中重构,识别缺陷反射信号,分析出此时激发探测点与体内缺陷的相对位置关系。接着,通过压缩感知算法输出体内缺陷反射信号的达到时间,然后拟合体内缺陷反射的超声信号到达时间,最终确定此时检测区域与缺陷的相对位置关系。通过在信号处理过程中选择合适的频率范围,降低了低频和高频噪声影响,以便计算机自动识别体内缺陷反射信号。实验结果表明,使用文中提出的二分搜索和压缩感知方法,从扫搜内部缺陷到定位内部缺陷需大约6 min;而使用激光超声逐点扫描检测相同面积需要14 min。
-
体内缺陷的定位加速首先通过二分搜索方法选取空间中稀疏采样点,接着通过基于小波基的压缩感知算法解决了体内缺陷反射信号的识别问题。然后对小波基进行了研究,解决了算法输出的体内缺陷到达时间的误差问题。
-
该节将介绍如何采用二分搜索的方法来减少激发扫查点的数量,并识别出一个近似的损伤区域,即过渡区域[15]。由于在脉冲激光和模拟样品接触位置会产生热膨胀区域,从而影响探测点接收到的位移信号,故文中使用异点激发、探测来避免这一问题。图1给出了二分搜索的示意图。图1左下虚线引出为激发探测距离示意图;K表示激发探测之间距离;D表示探测光;G表示激发线源。

图 1 二分搜索示意图
Figure 1. Schematic diagram of binary search
第一步:首先将检测区域分成M×N个网格。激发探测都位于网格的中心。激发为线源(在保持能量不变的条件下,线源的能量密度小于点源,不易损伤样品表面),激发探测之间距离固定为K,如图1左下图所示。M×N个网格中每一个网格为一个检测点(以激发点位置为参考),第M行称为第M条检测线。
第二步:采用二分搜索方法识别缺陷存在的大致区域。首先,激发点被放置在检测线中第N/2个检测点的中心,探测点被放置在距激发点距离为K的位置(如图1左下图所示),采集信号并感知是否存在缺陷反射信号(具体判别方法在第1.3节详细介绍),若存在缺陷反射信号,将此检测点标记为黄色;反之,则用绿色标记。在图1第二步中,黑色实心箭头表示搜索下一检测点的选择箭头,虚线引出为执行的选择次序。以当前检测线的中间检测点左边区域为例。此时激发点位于一条检测线的中间,接着激发点移动到当前检测点的左边一个检测点与当前检测线第一个检测点的中间检测点(如图1中第二步标号①所示),接着将当前激发点的右边一个检测点与第一个检测点中间的检测点作为下一个检测点的选择(如图1中第二步标号②所示)。最后,将当前激发点的左边一个检测点与第二个激发点中间的检测点作为下一次检测点的选择(如图1中第二步标号③所示)。在选定检测线中重复上述搜索,直到没有检测点剩余来作为下一个检测点的选择(向下的箭头表示激发线源,向上的箭头表示探测点)。
值得注意的是上述检测过程需要预先设置检测区域后才可进行,且设置的检测区不可太靠近边界,需去除样品边界反射波的影响。检测区域设置依据如下:设样品厚度为L,首先激发探测距离设置为$\dfrac{\sqrt{5}}{2}L$,从样品左端向右端进行扫查。若经小波变换后信号中包含体内缺陷反射信号,则以此时激发点位置为中心,建立横向长度为2L的检测区域,反之,则继续扫查。若在任意一个检测点检测出缺陷反射信号,应跳出当前检测过程,以检测出缺陷反射信号的检测点为中心开始二分搜索。所以,即使缺陷在体内有一定的走向,提出的二分搜索方法依然可以定位体内缺陷。
第三步:若选定的检测线存在缺陷,相应的检测线被命名为损坏检测线,并将第二步确定的缺陷大致存在区域用红色标出,随后执行第四步。若选定的检测线内没有缺陷,相应的检测线被命名为无缺陷检测线并跳过第四步。
第四步:在选定的一条检测线搜索结束后,用压缩感知算法识别出的缺陷反射信号到达时间(具体方法在1.3节详细说明)拟合曲线,此处曲线拟合的目标是拟合出体内缺陷反射的目标信号随着激发探测先靠近缺陷后远离缺陷在时间上的变化,缺陷反射的目标信号的到达时间先减小后增大,通过拟合出的曲线判断此区域与缺陷的相对位置关系。
第五步:向上向下分别执行二分搜索过程,重复第一−四步,分别搜索缺陷的上下边界,确定缺陷的区域。
-
与传统激光超声全扫描缺陷定位技术相比,采用激发探测距离固定的二分搜索方式可通过更少的检测次数来定位体内缺陷。假设$ {q}_{a} $是确定体内缺陷存在区域(图1中的第二步)所需的最多检测次数:
$$ {q}_{a}=2N/\sqrt{5}L $$ (1) 式中:N表示样品横向长度;L表示样品厚度。如果在任意一点检测到缺陷反射信号,则应跳出当前搜索过程,以检测出缺陷反射信号的检测点为中心开始二分搜索,以便二分搜索(图1中的第二步)方法识别体内缺陷的边界点。设额外检测次数[23]为$ {q}_{b} $:
$$ {q}_{b}={N}_{1}/K $$ (2) 式中:$ {N}_{1} $表示二分搜索区域设置的列数;K表示激发探测距离。最后,使用激发探测距离固定的检测方式对单条检测线进行二分搜索所需检测次数为:
$$ q = {q}_{a} + {q}_{b} $$ (3) 对检测区域中其他检测线重复此过程。在高度方向上继续采用二分搜索来选择下一条检测线,以找到体内缺陷的上下边界点。所需检测线数量如下所示,其中M为垂直方向上的检查区域尺寸:
$$ l=2{\rm log}_{2}M $$ (4) 完成设置区域检测所需的最多检测次数为:
$$ \begin{split} &p_1=q \cdot l=(2N/\sqrt{5}L+{N}_{1}/K)\cdot 2{\rm log}_{2}M \leqslant \\ &(N/(K+L\left)\right) \cdot 2{\rm log}_{2}M \end{split} $$ (5) 最后,逐点扫描方式总的测量次数p2和检测次数减少率R如下所示:
$$ p_2=(N/K)\cdot M $$ (6) $$ R=1-(p_1/p_2)\cdot 100{\text{%}} $$ (7) -
小波变换(Wavelet Transform,WT)具有很强的信号局部表征能力,可以用来检测信号的瞬态变换和奇异点[24]。因此,可把体内缺陷反射信号当做超声信号中的奇异点,用小波变换方法识别体内缺陷反射信号。小波变换具体原理请查阅参考文献[25-27]。
在现有小波基选取的基础上,结合激光超声体内缺陷反射信号特性,将超声信号使用小波基展开,选取特定层的小波系数进行信号重构。使用的小波函数有db6、ciof3、bior2.6、sym5[28]。在保证计算机可自动识别的前提下,设置合适的频带范围和阈值,再通过编写的算法将识别出的体内缺陷反射信号到达时间输出。小波变换过程如图2所示,其数学推导过程见参考文献[29]。

图 2 小波变换原理图
Figure 2. Schematic diagram of wavelet transform
图2中S表示实测到的超声信号,$ {h}_{i} $和$ {g}_{i} $分别表示低通滤波器和高通滤波器,$ {H}_{i} $和$ {G}_{i} $分别表示低通和高通滤波器的输出,$ {A}_{i} $和$ {D}_{i} $分别表示第i层的相似系数(低频系数)和细节系数(高频系数),向下箭头表示下采样。信号每分解一层都会生成相应层的相似系数和细节系数。缺陷反射信号能量主要集中在第四层,所以选取小波变换结果的第四层细节系数重构信号。小波变换结果如图3所示。
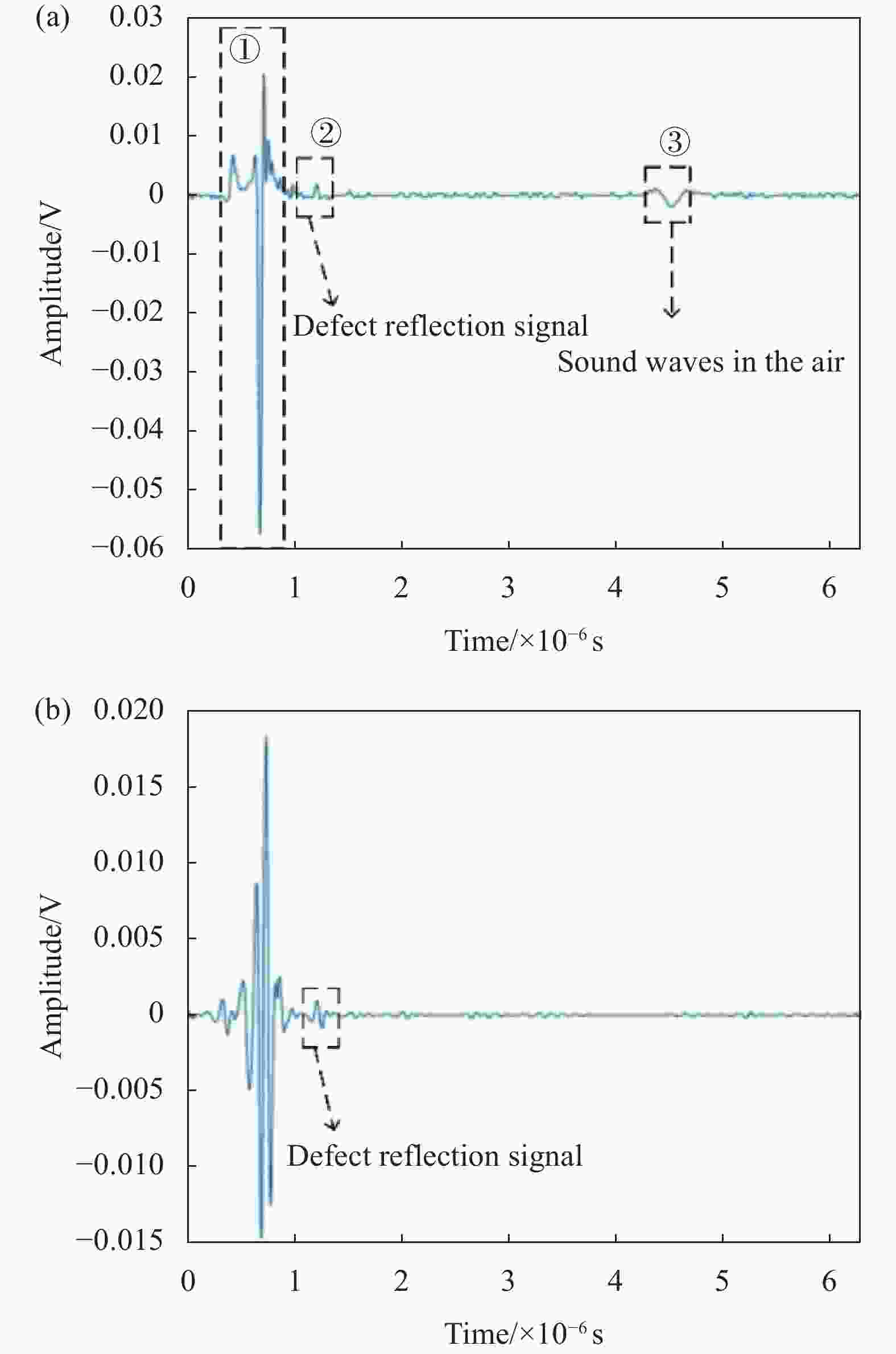
图 3 时域信号图。(a)实测超声信号;(b)小波变换后的超声信号
Figure 3. Time domain signal diagram. (a) Measured ultrasonic signal; (b) Ultrasonic signal after wavelet transform
图3中,横轴为时间,单位为s,纵轴为幅值,单位为V。图3 (a)中黑框②标记出的是体内缺陷反射信号,黑框③表示空气中的声波;图3 (b)中黑框表示相同信号经小波变换后的结果。对比图3 (a),图3 (b)中的重构信号中不包含空气中的声波等其他模式超声波,计算机更易于自动识别。综上,验证了小波变换方法的可行性。
但激光超声信号中除了体内缺陷反射的纵波和横波等目标信号外,还有表面波和掠面纵波等信号,如图3 (a)黑框①中信号。通常这些信号的幅值比目标信号大,会影响算法的感知结果。为了辅助计算机自动区分噪声信号和缺陷反射信号,需要设置信号检测范围和自动识别阈值。为了确定信号检测范围,首先要进行一次先验实验。用选定的激发探测距离在不含缺陷的铝板上进行单点信号采集,目的是用来确定掠面纵波,表面波等的到达时间。通过调节激发、探测源间的距离并设置信号检测范围,可将上述非目标信号的到达时间控制在信号检测范围外。因此可以避免识别出非目标信号,从而减小识别误差。为了帮助计算机自动识别超声信号中的体内缺陷反射信号,需要确定目标信号识别阈值,将整个表面波信号及其之前的部分命名为d1区,其后余部分命名为d2区。选取先验实验结果,即无缺陷区域检测结果的d2区最大值的两倍,设置为阈值。
由于体波方向角的原因,上述目标信号可能会由于体纵波、体横波模式幅值不同,在不同扫查区域提取到不同模式信号的到达时间,以致于在拟合曲线时,虽然检测区域包含缺陷同样可能会拟合不出目标线型。针对这一问题,在实际检测中先将信号小波变换后结果取绝对值,接着取出d2区最大值,再用小波变换后结果的d2区信号幅值与阈值比较,若大于阈值,则将其到达时间输出。若在100 ns时间区间内存在多个输出值,则输出该区间内所有大于阈值的时间点的平均值作为目标信号到达时间点输出;反之,则不包含体内缺陷反射信号。又由于体内缺陷反射纵波和横波到达时间之比为一常数(定义为C’),且d2区最大值对应时间点可能是体内缺陷反射纵波或反射横波。针对体内缺陷反射横波,为了去除其他模式超声波识别结果对曲线拟合结果的影响,用d2区最大值与所有输出值比较,若比值等于C’或1/C’,则输出到达时间的较大者。
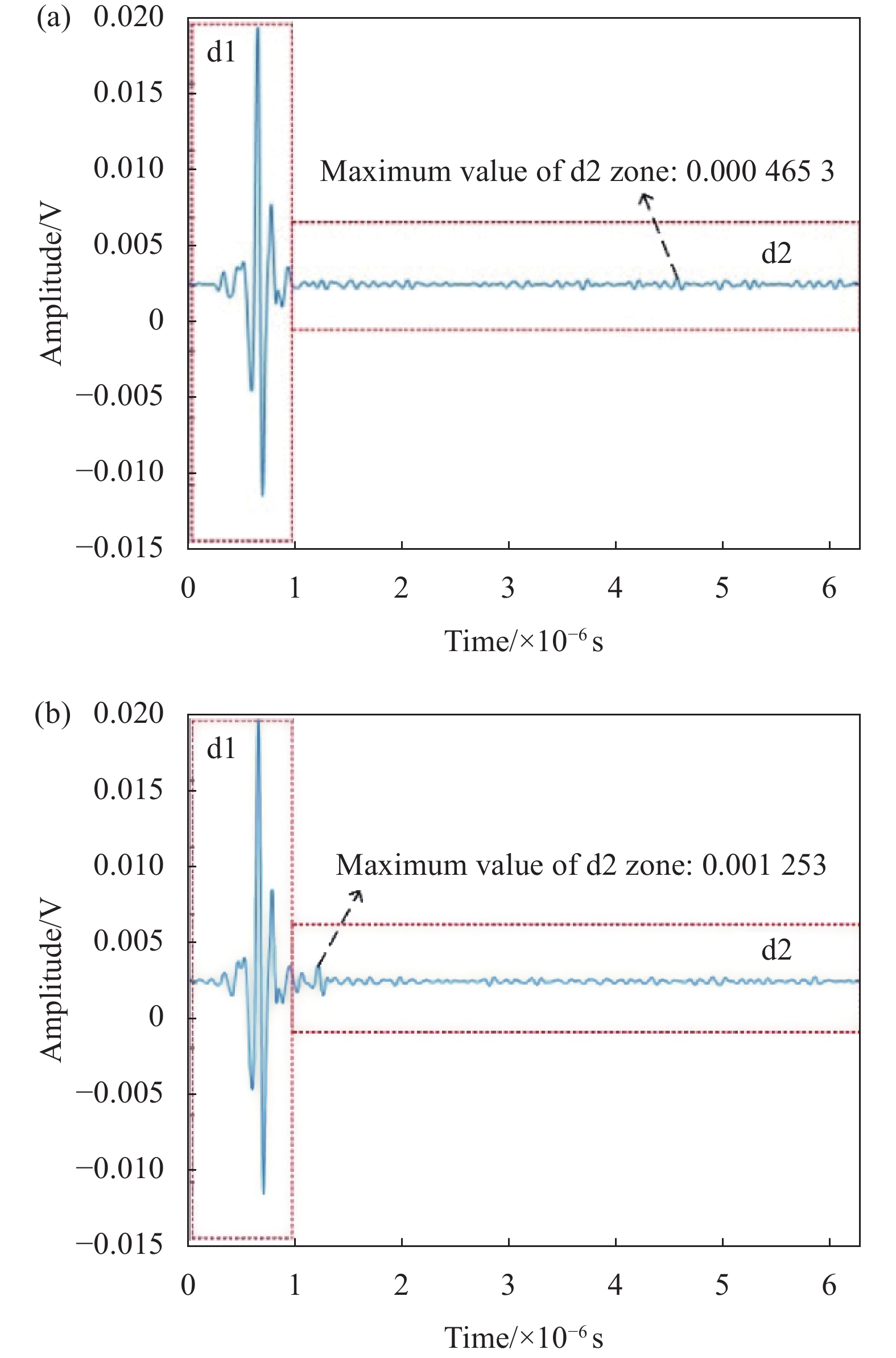
进而,为了保证曲线拟合过程能准确拟合出目标线型,还应在算法中加入附加约束条件。附加约束条件如下:以激发点位置为参考,若算法输出的缺陷反射信号到达时间小于样品底面反射信号的到达时间,则说明输出有效;反之则无效,将其不输出。图4 (a)和图4 (b)分别给出了不含缺陷反射信号和包含缺陷反射信号的实测超声信号小波变换后的结果图(横轴为时间,单位为s,纵轴为幅值,单位为V)。

图 4 信号处理结果图。(a)先验实验的小波变换结果 ;(b)包含缺陷反射信号的重构信号
Figure 4. Signal processing result diagram. (a) Wavelet transform result of a priori experiment; (b) Reconstructed signal containing defect reflection signal
图4 (a)中,d1区包含掠面纵波和表面波的重构信号,d2区包含信号其他部分的重构信号,箭头标识出的信号幅值2倍设置为阈值;图4 (b),d1区的区间长度与图4 (a)的d1区相同,d2区包含体内缺陷反射信号,箭头标识出的为体内缺陷反射信号幅值(远大于阈值)。通过对比图4 (a),计算机可自动从图4 (b)中识别出由体内缺陷反射的目标信号,从而验证了小波变换在体内缺陷反射信号自动识别方面的有效性。为了去除底面反射波对识别结果的影响,在已知样品厚度的情况下,计算出底面反射波到达时间,在识别过程中将其后面数据截去[30]。
为了验证小波变换方法的准确性,需要选择识别误差较小的小波基。针对同一组信号,表1给出了不同小波基对实验中9个不同扫查位置获得的反射信号识别结果。
表 1 各小波基自动识别结果与手动识别结果对比表(单位:ns)
Table 1. Comparison of automatic and manual identification results for different wavelet bases(Unit: ns)
Basis
pointdb6 coif3 sym5 bior2.6 y0 1 3.73 3.73 3.73 4.27 3.69 2 3.27 3.17 3.37 3.27 3.31 3 2.92 3.01 3.06 2.91 2.94 4 2.60 2.73 3.97 3.97 2.61 5 2.07 2.09 1.93 1.83 2.07 6 2.64 2.77 2.64 2.64 2.60 7 2.76 2.85 2.84 2.84 2.84 8 3.17 3.17 3.29 3.29 3.19 9 3.65 3.89 3.64 3.64 3.59 表1记录了手动识别和4种小波基自动识别目标信号到达时间结果。实验中使用手动识别体内缺陷反射信号的到达时间(用y0表示)来作为体内缺陷反射信号实际到达时间的参考。使用四种小波基‘coif3’、‘sym5’、‘bior2.6’、‘db6’识别出的对应体内缺陷反射信号与y0相差分别是300 ns、1360 ns、1360 ns和80 ns,分别在各组设置的稀疏扫查点中的第9点、第4点、第4点、第7点取得。由于上述识别误差来自选取的小波基自身性质,正因如此,所以才需要选取合适的小波基[31]。基于上述分析,算法使用‘db6’自动识别效果最好,与原信号中目标信号到达时间误差最小,所以选择‘db6’小波基。
-
结合上述小波变换的相关研究,文中使用的压缩感知方法是将实测超声信号在小波域内压缩,通过阈值比较方法感知体内缺陷反射信号的到达时间。压缩感知[32-34]是基于信号稀疏表示提出的信号采集理论,其数学理论描述如下:假设x∈${R}^{N\times1}$为一维信号,则其可以由一组正交基展开(例如小波基),表示为基的线性加权表示:
$$ x={\sum }_{k=1}^{N}{d}_{k}{y}_{k}=Dy $$ (8) $$ D=\left\{{d}_{1}\text{,}\cdots \text{,}{d}_{N}\right\} $$ (9) 式中:D是一个N×N的矩阵,表示字典;${d}_{1},\cdots ,{d}_{N}$是字典中的基(对应于文中的小波基);y是信号x在D (字典)空间的稀疏表示。
在大多数情况下,信号本身并不稀疏,但经某种变换(如小波变换),保留变换后系数中目标系数,经过保留后的系数可认为是稀疏的。例如,在对任意信号进行小波变换,可通过保留其系数中的k个分量,把其他N-k个分量置零(N-k个系数对应变换域中的基,对目标信号重构的贡献较小),然后采用压缩感知重构算法(OMP)重构信号。通过上述过程,连续信号可由稀疏的小波系数和小波基重构获得,从而实现了连续信号的稀疏化。综上,可认为信号x在小波基D下是k稀疏的。
对于任意信号x,可将其投影到一组测量矩阵Φ=$\left\{ {{\mathit{\Phi} }_{1},\cdots ,\mathit{\Phi} }_{M} \right\}$上,得到x在测量矩阵Φ上线性测量向量,即
$$ s=\mathit{\Phi}x $$ (10) 式中:Φ∈$ {R}^{M\times N} $(M<N),Φ的每一行可以看作一个传感向量,它与任意信号x相乘,拾取了信号的一部分信息,根据这M个传感值和基空间D,可通过线性变换求解原始信号,将公式(8)代入公式(10)得到:
$$ s=\mathit{\Phi}Dy= \nabla y $$ (11) 式中:$ \nabla $=ΦD为维度M×N矩阵。通过公式(11)可知,压缩感知将信号x从N维降为M维观测信号s,由于公式(11)中未知数个数N大于方程个数M,无法通过直接求解方程得出解。通过公式(8)可以看出y是k稀疏的,且k<M<<N,则可通过已有的稀疏分解算法求解公式(8)的逆问题得到稀疏系数y,再通过公式(8)得到重构信号x,即已知s,Φ,D,求解y。为保证算法收敛性和计算结果准确性,公式(10)中的Φ必须满足有限等距性质(Restricted Isometry Property, RIP)准则[35],RIP准则的一种等价情况是测量矩阵Φ和稀疏矩阵D满足不相关性。对于CS理论,其逆变换重构过程可以转化为求解$ {l}_{0} $范数下的最优化问题:
$$ {\rm{min}} {\left\|y\right\|}_{l_0} \text{,s.t.}\mathit{\Phi}Dy=s $$ (12) 而$ {l}_{0} $范数的求解是个NP-hard问题,因此可以将问题转换为[36]:
$$ {\rm{min}} {\left\|y\right\|}_{l_1} \text{,s.t.}\mathit{\Phi}Dy=s $$ (13) 对于上式中$ {l}_{1} $最小范数下的最优化问题,求解算法有匹配追踪法[37]、正交匹配追踪法(OMP)[38]、链式追踪法[39]等。
文中首先对实测超声信号在小波基上稀疏表示,然后对选定层高频系数进行测量,最后通过BP算法恢复信号。BP算法的主要思想是最优化逼近方法,通过将非凸问题转化为凸问题求解找到信号的逼近,该方法提出使用$ {l}_{1} $范数替代$ {l}_{0} $范数来解决最优化问题,以便使用线性规划方法来求解。这样就很大程度减少了重构信号所需要的数据量。
-
为验证二分搜索和压缩感知算法,使用Comsol Multiphysics建立模型[40],模拟扫查过程,并用基于二分搜索的压缩感知算法输出目标到达时间。
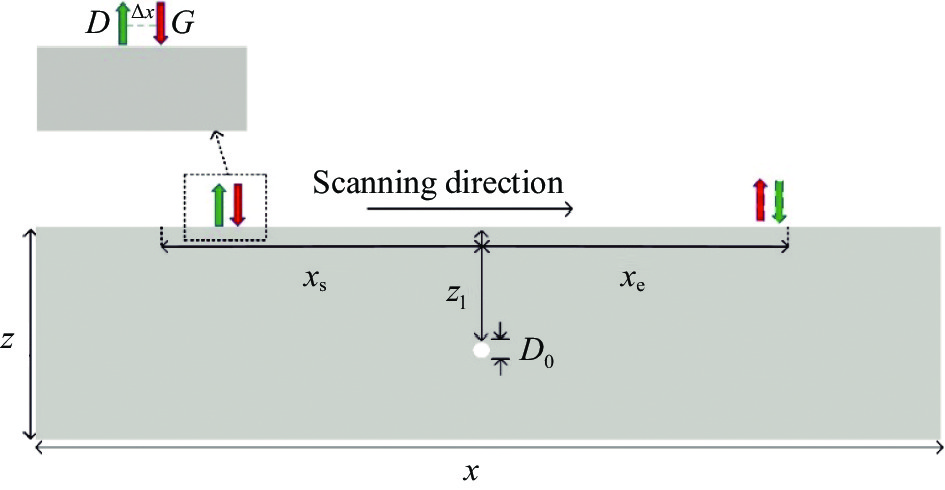
在Comsol Multiphysics软件中构建如图5所示的模型,模型材料设置为高强度钢;尺寸设置为:宽为x mm、高为z mm;模型内部${{\textit{z}}}_{1}$ mm深度处设置一个直径为$ {D}_{0} $ mm的圆形通孔缺陷。
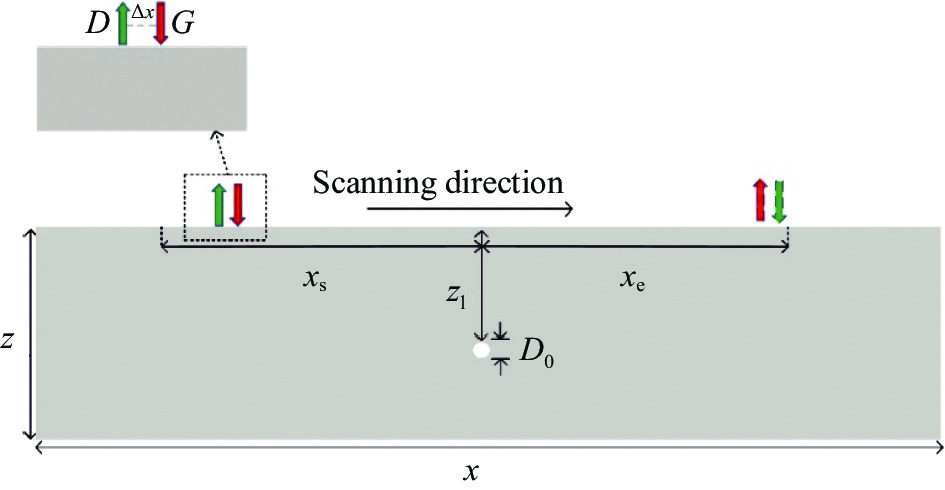
图 5 数值模拟结构示意图
Figure 5. Schematic diagram of numerical simulation structure
如图5左上角的局部扫描设置图所示,在G点(对应于红色箭头指向的点)处设置一个在时间空间上均呈高斯分布的热源以模拟脉冲激光入射模型表面并在局部区域迅速热膨胀、进而产生超声波的过程,其表达式为:
$$ Q= \frac{E}{{t}_{0}} \times \frac{1}{\pi {r}_{0}^{2}} \times{\rm{exp}}\left[-\frac{x-{x}_{0}^{2}}{{r}_{0}^{2}}\right] \times{\rm{exp}}\left(- \frac{t}{{t}_{0}} \right)\times \frac{t}{{t}_{0}} $$ (14) 式中:E为脉冲能量;$ {t}_{0} $为脉冲宽度;$ {r}_{0} $为光斑半径;$ {x}_{0} $为激光光斑中心位置。在距离G点右侧$ \Delta x $位置处的D点获取数据。通过等距离(0.125 mm)改变激发点位置的方式模拟扫查,且在改变后的G点右侧$ \Delta x $位置处的D点获取数据,在[−2.5 mm,2.5 mm]范围内扫查,即在这一区域内重复计算上述模型,最后整合数据。
最后去除图5模型中设置的圆形缺陷,将其变成一个无缺陷模型。在保持之前参数不变的前提下,计算一组无缺陷模型,用来确定信号检测范围和阈值,便于后续压缩感知算法识别体内缺陷反射信号。
上述有限元数值模拟中材料属性、脉冲激光参数以及模型的结构参数请查阅参考文献[41]。
-
为了去除因激发探测位置改变而到达时间不变信号的影响和方便分析模拟结果,将有圆形缺陷模型和无缺陷模型的模拟数据作差。结果如图6所示(纵轴表示时间,横轴表示激发点位置,单位为mm)。

图 6 信号处理结果图。(a)模拟做差结果图;(b) 压缩感知识别信号结果图
Figure 6. Signal processing result diagram. (a) Simulation result difference diagram; (b) Compressed sensing recognition signal result diagram
图6 (a)中颜色代表在对于坐标处探测到的超声波离面位移幅值,A为缺陷反射的横波信号,B为缺陷反射的纵波信号。由于横波和纵波在体内传播方向角不同,在其能量集中的传播方向上幅值大[42]。图6 (b)给出了数值模拟结果的压缩感知识别结果,横轴表示激发点位置(对应数值模型中扫查范围[−2.5 mm,2.5 mm]),纵轴表示时间,图中蓝色点表示通过压缩感知算法识别缺陷反射信号的到达时间。
随后针对体内缺陷定位加速问题,对数值模拟结果进行了验证。首先以0.5 mm间隔在模型上建立网格,在保持其他条件不变的情况下,以激发探测距离为1 mm进行一维二分搜索。二分搜索结果如图7所示:

图 7 模拟二分搜索结果图。(a)二分搜索示意图;(b)曲线拟合结果图
Figure 7. Simulated binary search result diagram. (a) Binary search schematic diagram; (b) Curve fitting result diagram
图7 (a)显示了二分搜索示意图,图中白色为未扫查的检测点,黄色和红色为包含缺陷反射信号的检测点。图7 (b)为曲线拟合结果图,图中缺陷反射信号的到达时间先逐渐提前再逐渐延迟,表示扫查点先靠近缺陷,再远离缺陷。对拟合出的抛物线求导,导数为0的点表示离缺陷最近的点,从而可以确定缺陷存在的最小区域。在设置的检测区域中,缺陷的实际位置x=0 mm,通过二分搜索和压缩感知定位缺陷的位置为x=−0.2 mm,与实际位置相比偏移4%。
综上,使用传统激光超声全扫描方法定位上述缺陷需要41个点;而在不考虑二分搜索前粗扫过程的前提下,使用文中提出的二分搜索和压缩感知方法需9个点。通过比较直接扫查样品方法和使用二分搜索和压缩感知方法在扫查点数的差异,可验证前文提出的二分搜索和压缩感知方法可对体内缺陷定位加速的论述。
-
前文中介绍了二分搜索和压缩感知方法可加速体内缺陷识别,并用数值模拟验证上述方法在一维情况下的可行性。该节用实验验证了二分搜索和压缩感知算法在加速体内缺陷定位在二维情况下的可行性。
实验使用柱面镜将波长为1064 nm的脉冲激光聚焦为线光源(线光源长约5 mm,宽约0.1 mm,激光重频3000 Hz,能量1 mJ,能量密度<250 mJ/cm2(热弹机制下);使用激光测振仪(控制器型号 Polytec OFV-5000,光学头型号Polytec OFV-505,波长λ≈633 nm,检测带宽DC~20 MHz)作为超声探测装置。为了确定信号检测范围和阈值,首先进行一次先验实验,通过获取表面波到达时间,结合对应材料中表面波速度计算得到探测光源与激发光源的距离$ \Delta x $≈1.46 mm。随后固定激发、探测位置,使用步进电机移动样品,实现二分搜索。使用激光测振仪探测超声信号,每组信号平均128次,记录在计算机中。实验使用的样品为120 mm×30 mm×8 mm的铝板。铝板内包含一个直径0.5 mm、长度10 mm的横穿孔缺陷,缺陷中心距离样品表面4 mm。图8所示为使用二分搜索和压缩感知技术加速体内缺陷定位的实验装置。

图 8 检测系统图。(a)检测系统原理图;(b)检测系统装置图
Figure 8. Detection system diagram. (a) Detection system schematic diagram; (b) Detection system device diagram
使用上述实验设置下分别进行两组缺陷定位实验,第一组是待检测区域的全扫描,首先从起始点沿X轴移动,每次移动步长为1 mm,到达设置的检测区域边界后,向下换行到与上一行起始点X轴坐标相同的点,以相同的步长和移动方向移动到检测边界,重复上述移动方式直到完成扫描。第二组是二分搜索加速缺陷定位实验。检测线设置如图9所示(在待检测区域中建立10×40个网格,网格大小为1 mm×1 mm)。

图 9 缺陷搜索设置示意图
Figure 9. Schematic diagram of defect search settings
-
由于样品内缺陷位置未知,在缺陷搜索过程中会存在以下四种情况,如图10所示(纵轴表示时间,单位为s;横轴表示二分搜索点序号):(1)预先设置的检测区域不包含缺陷;(2)预先设置的检测区域靠近缺陷的左边界(如图10 (a)所示);(3)预先设置的检测区域包含缺陷(如图10 (c)所示);(4)预先设置的检测区域靠近缺陷的右边界(如图10 (e)所示)。

图 10 实验结果图 。(a)、 (c)、 (e)为预置区域在左边、中间(包含缺陷)、在右边;(b) 、(d)、 (f)为对应的曲线拟合图
Figure 10. Experimental results. (a), (c), (e) show that the preset area is on the left, in the middle (including defects) and on the right; (b), (d), (f) is the corresponding curve fitting diagram
在拟合数据时,对于情况(1),将拟合不出曲线,即输出无缺陷的结果;对于情况(2)、情况(3)和情况(4),拟合出的目标信号到达时间将先逐渐提前再逐渐延迟(分别对应图10 (b)、(d)和(f))。若样品较大时需要多次设置检测区域,且在下一次的检测区域设置时应包含上一次未扫查的点。
图10中(a)、(c)和(e)给出了扫查光源和缺陷在三种状态下的位置关系,图10中(b)、(d)和(f)分别对应检测区域为(a)、(c)和(e)情况下B扫二分搜索的曲线拟合结果。图10 (a)中向上虚线箭头表示在情况(2)设置的检测线中检测点(箭头引出处的检测点)检测到体内缺陷反射信号后跳出当前搜索过程,并以当前检测点为中心重新开始二分搜索,图10 (c)和(e)的虚线箭头同;图10 (a)中向右虚线箭头表述体内缺陷位置,图10 (c)和(e)缺陷位置和图10 (a)相同。
结合1.1节体内缺陷搜索过程,从确定体内缺陷大致区域开始,到建立网格进行缺陷二分搜索定位,最后获得如图10 (a)所示结果需6 min;获得如图10 (c)和(e)所示结果需3 min。在设置的检测区域的每一行检测线需检测11个点$\left(\dfrac{{N}_{1}}{K}=\dfrac{15}{1.46}\approx 11\right)$。从图9设置检测区域从左端搜索至右端,经过如图10 (a)过程即可通过反射回波确定体内缺陷的存在位置,缺陷二维定位最多需98个点。文中提出的二分搜索和压缩感知体内缺陷定位加速技术,若待检测区域不存在缺陷(如情况(1)),则从公式(1)对应的步骤就可确定区域无缺陷,耗时同样小于传统激光超声检测技术。且在设置的检测区域中,缺陷的实际位置x=4.9 mm,通过二分搜索算法计算的缺陷位置为x=4.98 mm,与实际位置相比偏移为1.6%。
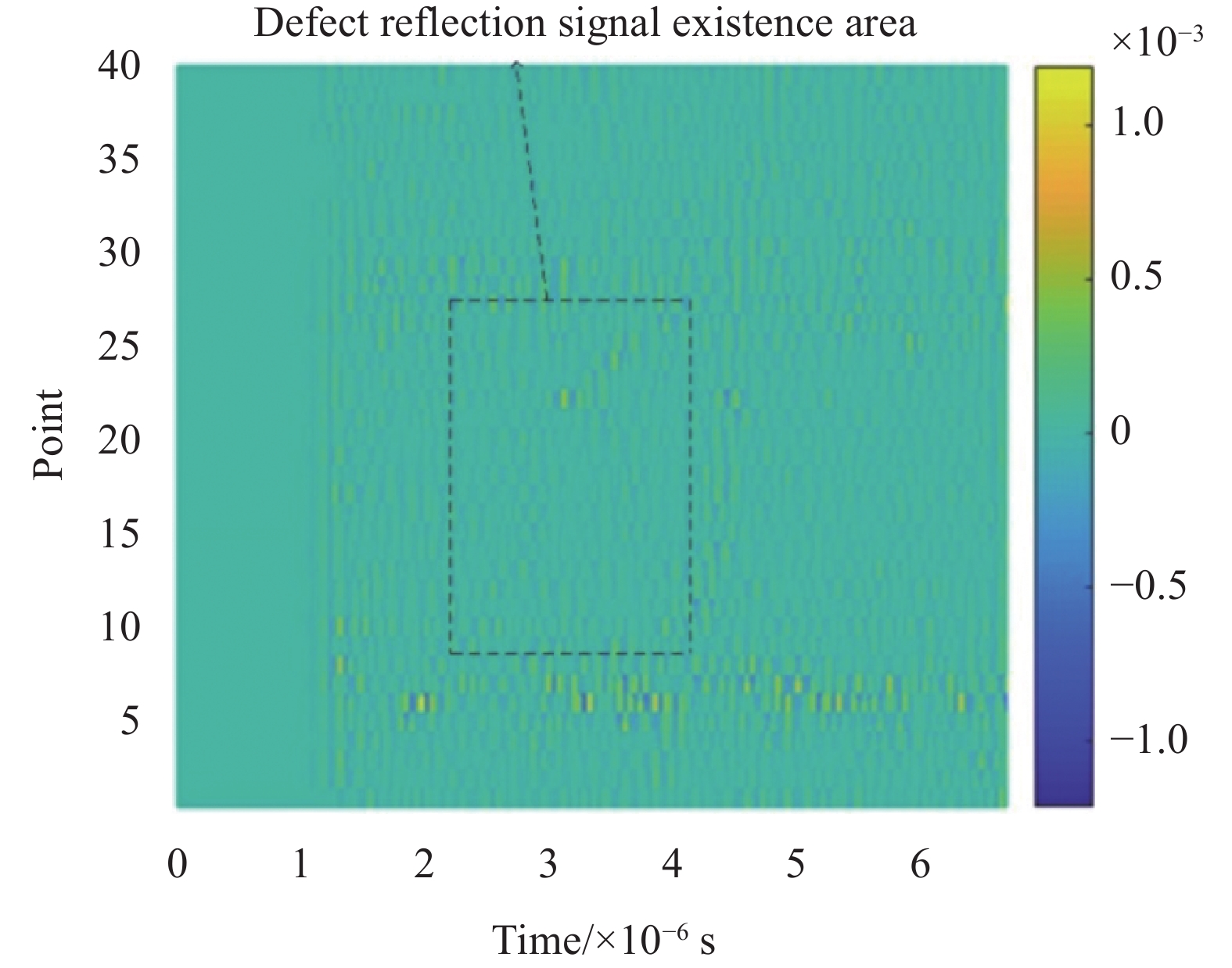
为了对比文中提出的方法和全扫描方法的检测时间,笔者使用传统的激光超声扫查手段,以1 mm移动步长,按3.1节中描述的步骤对样品进行了一次二维扫查,总计耗时14 min,其B扫结果经小波变换后如图11所示,图中,横轴代表时间,纵轴代表检测线中的点,颜色代表在对于坐标处探测到的超声波离面位移幅值,箭头表示体内缺陷反射信号存在区域。
从图11的黑框中看不出缺陷反射信号,所以无法通过分析得出体内缺陷的位置。但在同样的扫查步长下,文中提出的二分搜索和压缩感知方法可通过曲线拟合的方式可确定体内缺陷位置,且与实际位置的偏移为1.6%。通过对比相同步长下二分搜索和全扫描的结果,验证了二分搜索和压缩感知在加速方面的有效性。
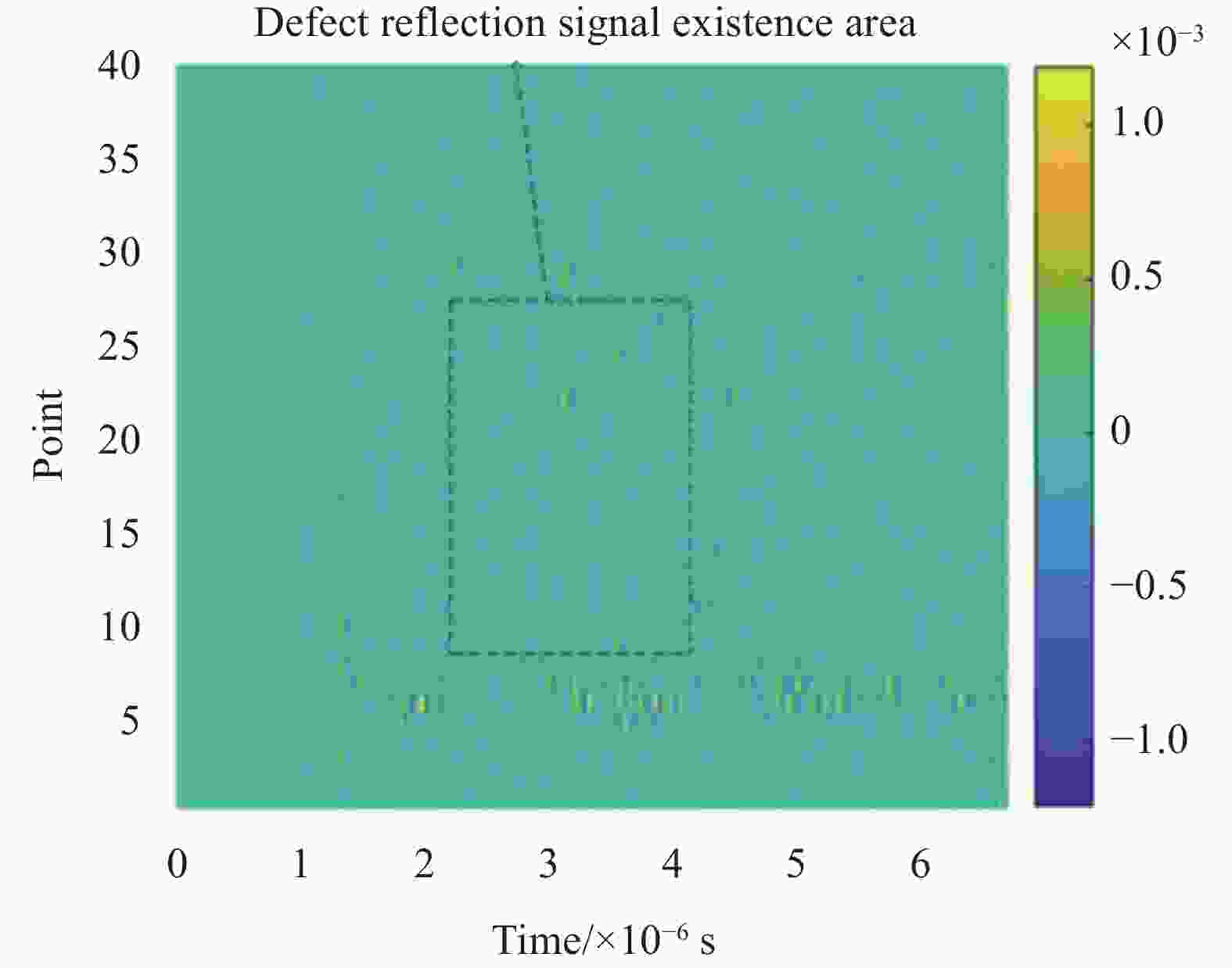
图 11 扫描步长1 mm的B扫结果图
Figure 11. B-sweep results with 1 mm scanning step
为了确定检测区域内缺陷位置,以步长为0.1 mm按3.1节中描述的步骤对样品进行了一次二维扫查。B扫实验结果如图12所示,图中,横轴代表时间,纵轴代表检测线中的点,C表示样品底面反射纵波;D表示空气中的声波;E表示体内缺陷的反射信号,颜色代表在对于坐标处探测到的超声波离面位移幅值,箭头指出处表示可接收到体内缺陷反射信号的检测点。
如该节开始的讨论,在预置检测区域是否存在缺陷是未知的。为了精确定位缺陷,使用0.1 mm步长完成上述待测区域二维扫描,实验加信号后处理过程总耗时660 min,使用上述步长完成待检测区域检测需40000个点,即40000×1.0=40000 s (实验数据经测振仪探测到以后,经信号放大器传至示波器最后传至电脑,经过上述过程每一个空间采样点平均需要1.0 s),若检测区域不存在缺陷,进行的缺陷定位实验同样是耗时长的。值得注意的是,全扫描方法和文中提出方法在横向和纵向扫查步长上,两者相差100倍;在时间上,两者相差110倍。但传统激光超声检测技术采用全扫描方式来定位缺陷,且以相同的步长(以1 mm为步长移动)检测设置区域,不可完成缺陷的横向定位。图12中共有400个扫查点,但仅有约180个点对缺陷定位有贡献(图12中Y=70到Y=250中间扫查点),存在约220个无用扫查点,这些扫查点探测到的信号对缺陷定位贡献很小。虽可对缺陷进行横向定位,但设置了较多冗余检测点,增加了体内缺陷定位的耗时。通过文中提出的缺陷定位加速技术,体内缺陷的二维定位最多需98个点。文中提出的体内缺陷检测加速技术,不仅通过二分搜索方法避免了冗余扫查点的问题,而且可以确定存在缺陷的横向位置(图10 (d)),为表征缺陷的横向位置和深度信息节省时间,达到了体内缺陷定位加速的目的。

图 12 扫描步长0.1 mm的B扫结果图
Figure 12. B-sweep results with 0.1 mm scanning step
综上,文中提出的方法在体内缺陷定位加速上的效果明显,但仅从二分搜索的扫查点中无法得出精确的体内缺陷深度信息。文中提出的体内缺陷定位加速技术聚焦于可快速确定体内是否存在缺陷,在工业检测中若需要快速确定待测物体中是否包含缺陷,文中提出的方法将会为这一问题节省时间。但当体内存在多个缺陷且之间距离较小时,文中提出的算法会将其判定为一个较大的缺陷;若距离较大时,拟合出的曲线将呈‘w’型,表示目标信号到达时间将先逐渐提前再逐渐延迟,再逐渐提前再逐渐延迟,通过拟合出的曲线可分辨出体内多个缺陷。
-
文中提出了一种基于二分搜索和压缩感知的激光超声内部缺陷快速检测技术,实现了体内缺陷的快速定位。通过对压缩感知的理论分析,对这一过程进行适用于压缩感知提取体内缺陷反射信号的模拟,验证了压缩感知算法的可行性。之后使用二分搜索和压缩感知算法进行了实验,结果表明在同一区域,相同的实验设置前提下,二分搜索和压缩感知方法的缺陷定位结果与直接进行高分辨率扫描的缺陷定位结果与缺陷在体内实际位置偏移为1.6%。
与传统的激光超声缺陷定位技术相比(缺陷以较高的空间精度进行检测和量化),文中提出二分搜索和压缩感知算法的扫描点数量和扫描时间减少了75.5%。针对相同的扫查面积,使用传统的激光超声全扫描方法需要400个点,且无法定位体内缺陷;而使用文中提出的二分搜索和压缩感知方法最多需要扫查98个点,且定位结果与实际位置偏移小;扫查时间方面,使用传统的激光超声全扫描方法共耗时14 min,而使用文中提出的方法最多耗时6 min。文中提出的方法为工业中需要快速检测大面积物体中是否包含缺陷但传统全扫描检测耗时长的问题提供了新的解决方法,且在此基础上,可进一步对拟合出曲线的张角进行分析,从而获得缺陷深度信息,为激光超声体内缺陷定位提供了新的思路。
Application of binary search and compressive sensing for rapid detection of defects inside laser ultrasound
-
摘要: 激光超声检测技术由于其非接触、高灵敏度和高空间分辨率特点,在无损检测领域具有广阔的应用前景。但其在高空间分辨率下进行大面积扫查需要花费较长的扫描时间,实用性受到制约。针对上述问题,文中提出使用二分搜索方法提高了检测速度,并使用压缩感知算法将所探测到的激光超声信号表示为小波基的线性加权组合,最终从二分搜索获得的较少实测激光超声信号中还原出整个待测范围内的信号。进一步,搭建了内部缺陷的激光超声扫描检测装置,使用脉冲激光实现超声的激光激发,多普勒测振仪实现超声的非接触探测,通过固定激发探测距离移动样品的方式实现了基于二分搜索和压缩感知的激光超声内部缺陷快速检测。文中提出的技术不但具有非接触、高灵敏度和高空间分辨率等激光超声的特点,还能提高检测效率。实验结果表明,在120 mm×30 mm×8 mm的铝板上确定缺陷位置需6 min,相比于逐点扫查需要14 min,缩短了体内缺陷定位所需要时间。Abstract: Laser ultrasonic inspection technology has a broad application prospect in the field of nondestructive testing due to its non-contact, high sensitivity and high spatial resolution characteristics. However, its practicality is limited by the long scanning time required for large area sweeping at high spatial resolution. To address the above problems, a binary search method was proposed to improve the detection speed, and a compressed sensing algorithm was used to represent the detected laser ultrasound signal as a linear weighted combination of wavelet bases, and finally the entire range to be measured was restored from the less real laser ultrasound signal obtained by binary search. Further, a laser ultrasonic scanning detection device for internal defects was built, the laser excitation of ultrasound was achieved by using a pulsed laser, the non-contact detection of ultrasound was achieved by Doppler vibrometer, and a fast detection of internal defects by laser ultrasound based on binary search and compression perception was achieved by moving the sample at a fixed excitation detection distance. The technique proposed in this paper not only has the characteristics of laser ultrasound such as non-contact, high sensitivity and high spatial resolution, but also can improve the detection efficiency. The experimental results show that it takes 6 min to determine the defect location on a 120 mm×30 mm×8 mm aluminum plate, compared with 14 min for point-by-point sweeping, which shortens the time required for in vivo defect localization
-
图 3 时域信号图。(a)实测超声信号;(b)小波变换后的超声信号
Figure 3. Time domain signal diagram. (a) Measured ultrasonic signal; (b) Ultrasonic signal after wavelet transform
图 4 信号处理结果图。(a)先验实验的小波变换结果 ;(b)包含缺陷反射信号的重构信号
Figure 4. Signal processing result diagram. (a) Wavelet transform result of a priori experiment; (b) Reconstructed signal containing defect reflection signal
图 6 信号处理结果图。(a)模拟做差结果图;(b) 压缩感知识别信号结果图
Figure 6. Signal processing result diagram. (a) Simulation result difference diagram; (b) Compressed sensing recognition signal result diagram
图 7 模拟二分搜索结果图。(a)二分搜索示意图;(b)曲线拟合结果图
Figure 7. Simulated binary search result diagram. (a) Binary search schematic diagram; (b) Curve fitting result diagram
图 8 检测系统图。(a)检测系统原理图;(b)检测系统装置图
Figure 8. Detection system diagram. (a) Detection system schematic diagram; (b) Detection system device diagram
图 10 实验结果图 。(a)、 (c)、 (e)为预置区域在左边、中间(包含缺陷)、在右边;(b) 、(d)、 (f)为对应的曲线拟合图
Figure 10. Experimental results. (a), (c), (e) show that the preset area is on the left, in the middle (including defects) and on the right; (b), (d), (f) is the corresponding curve fitting diagram
表 1 各小波基自动识别结果与手动识别结果对比表(单位:ns)
Table 1. Comparison of automatic and manual identification results for different wavelet bases(Unit: ns)
Basis
pointdb6 coif3 sym5 bior2.6 y0 1 3.73 3.73 3.73 4.27 3.69 2 3.27 3.17 3.37 3.27 3.31 3 2.92 3.01 3.06 2.91 2.94 4 2.60 2.73 3.97 3.97 2.61 5 2.07 2.09 1.93 1.83 2.07 6 2.64 2.77 2.64 2.64 2.60 7 2.76 2.85 2.84 2.84 2.84 8 3.17 3.17 3.29 3.29 3.19 9 3.65 3.89 3.64 3.64 3.59  下载: 导出CSV
下载: 导出CSV
-
[1] Park B, Sohn H, Malinowski P, et al. Delamination localization in wind turbine blades based on adaptive time-of-flight analysis of noncontact laser ultrasonic signals [J]. Nondestructive Testing and Evaluation, 2017, 32(1): 1-20. doi: 10.1080/10589759.2015.1130828 [2] Sohn Y, Krishnaswamy S. Interaction of a scanning laser-generated ultrasonic line source with a surface-breaking flaw [J]. The Journal of the Acoustical Society of America, 2004, 115(1): 172-181. doi: 10.1121/1.1630997 [3] Kim H, Jhang K, Shin M, et al. A noncontact NDE method using a laser generated focused-Lamb wave with enhanced defect-detection ability and spatial resolution [J]. NDT & E International, 2006, 39(4): 312-319. doi: 10.1016/j.ndteint.2005.09.001 [4] Liu P P, Sohn H, Kundu T, et al. Noncontact detection of fatigue cracks by laser nonlinear wave modulation spectroscopy (LNWMS) [J]. NDT & E International, 2014, 66: 106-116. doi: 10.1016/j.ndteint.2014.06.002 [5] Choi S, Seo H, Jhang K Y. Noncontact evaluation of acoustic nonlinearity of a laser-generated surface wave in a plastically deformed aluminum alloy [J]. Research in Nondestructive Evaluation, 2015, 26(1): 13-22. doi: 10.1080/09349847.2014.934496 [6] Sohn H, Dutta D, Yang J, et al. Automated detection of delamination and disbond from wavefield images obtained using a scanning laser vibrometer [J]. Smart Materials and Structures, 2011, 20(4): 045017. [7] Ruzzene M. Frequency–wavenumber domain filtering for improved damage visualization[C]//AIP Conference Proceedings, 2007, 894(1): 1556. [8] Celli P, Gonella S. Laser-enabled experimental wavefield reconstruction in two-dimensional phononic crystals [J]. Journal of Sound and Vibration, 2014, 333(1): 114-123. doi: 10.1016/j.jsv.2013.09.001 [9] Yashiro S, Takatsubo J, Toyama N. An NDT technique for composite structures using visualized Lamb-wave propagation [J]. Composites Science and Technology, 2007, 67(15-16): 3202-3208. doi: 10.1016/j.compscitech.2007.04.006 [10] Staszewski W J, Lee B C, Mallet L, et al. Structural health monitoring using scanning laser vibrometry: I. Lamb wave sensing [J]. Smart Materials and Structures, 2004, 13(2): 251-260. doi: 10.1088/0964-1726/13/2/002 [11] Park B, An Y K, Sohn H, et al. Visualization of hidden delamination and debonding in composites through noncontact laser ultrasonic scanning [J]. Composites Science and Technology, 2014, 100: 10-18. doi: 10.1016/j.compscitech.2014.05.029 [12] An Y K, Park B, Sohn H, et al. Complete noncontact laser ultrasonic imaging for automated crack visualization in a plate [J]. Smart Materials and Structures, 2013, 22(2): 025022. [13] Michaels T E, Michaels J E, Ruzzene M. Frequency-wavenumber domain analysis of guided wavefields [J]. Ultrasonics, 2011, 51(4): 452-466. doi: 10.1016/j.ultras.2010.11.011 [14] Liu P P, Sohn H, Park B. Baseline-free damage visualization using noncontact laser nonlinear ultrasonics and state space geometrical changes [J]. Smart Materials and Structures, 2015, 24(6): 065036. doi: 10.1088/0964-1726/24/6/065036 [15] Park B, Sohn H. Accelerated damage visualization using binary search with fixed pitch-catch distance laser ultrasonic scanning [J]. Smart Materials and Structures, 2017, 26(7): 075005. doi: 10.1088/1361-665X/aa7428 [16] 喻玲娟, 电视技术 谢 J. 压缩感知理论简介 [J]. 2008, 032(012): 16-8. doi: 10.3969/j.issn.1002-8692.2008.12.005 Yu Lingjuan, Xie Xiaochun. Brief introduction of compressed sensing theory [J]. Video Engineering, 2008, 32(12): 16-18. (in Chinese) doi: 10.3969/j.issn.1002-8692.2008.12.005 [17] Donoho D L. Compressed sensing [J]. IEEE Transactions on Information Theory, 2006, 52(4): 1289-1306. doi: 10.1109/TIT.2006.871582 [18] De Marchi L, Cera G, Guido M. Compressive sensing of full field images in Lamb waves inspections[C]//2013 IEEE International Ultrasonics Symposium (IUS), 2013: 154-157. [19] Di Ianni T, De Marchi L, Perelli A, et al. Compressive sensing of full wave field data for structural health monitoring applications [J]. IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 2015, 62(7): 1373-1383. doi: 10.1109/TUFFC.2014.006925 [20] Park B, Sohn H. Reconstruction of laser ultrasonic wavefield images from reduced sparse measurements using compressed sensing aided super-resolution[C]//AIP Conference Proceedings, 2017, 1806(1): 030003. [21] 黄振. 稀疏多频带信号的亚奈奎斯特采样与重构算法研究[D]. 昆明: 云南大学, 2015. [22] Achenbach J. Wave Propagation in Elastic Solids[M]. Amsterdam: Elsevier, 2012. [23] Neapolitan R E, Naimipour K. Foundations of Algorithms[M]. Burlington: Jones & Bartlett Learning, 1997. [24] Grinsted A, Moore J, Jevrejeva S. Application of the cross wavelet transform and wavelet coherence to geophysical time series [J]. Nonlinear Processes in Geophysics, 2004, 11(5-6): 561-566. doi: 10.5194/npg-11-561-2004 [25] 王钢, 周若飞, 电子与信息学报 邹 J. 基于压缩感知理论的图像优化技术 [J]. 2020, 41(1). doi: 10.11999/JEIT190669 Wang Gang, Zhou Ruofei, Zou Yikun. Research on image optimization technology based on compressed sensing [J]. Journal of Electronics & Information Technology, 2020, 42(1): 222-233. (in Chinese) doi: 10.11999/JEIT190669 [26] 何思源, 李贵元, 刘华姣, et al. 最优小波基选择法在测震数据干扰处理中的研究与应用 [J]. 2019, 039(003): 49-56. doi: 10.13512/j.hndz.2019.03.007 He Siyuan, Li Guiyuan, Liu Huajiao, et al. Application and research of optimal wavelet base selection method in seismic data processing [J]. South China Journal of Seismology, 2019, 39(3): 49-56. (in Chinese) doi: 10.13512/j.hndz.2019.03.007 [27] 由四海, 王宏力, 冯磊, et al. 基于小波变换与压缩感知的脉冲星TOA估计 [J]. 2020, 49(2): 7. doi: 10.3788/IRLA202049.0226001 You Sihai, Wang Hongli, Feng Lei, et al. Pulsar TOA estimation based on wavelet transform and compressed sensing [J]. Infrared and Laser Engineering, 2020, 49(2): 0226001. (in Chinese) doi: 10.3788/IRLA202049.0226001 [28] Zhang D. Fundamentals of Image Data Mining[M]. Cham: Springer, 2019: 35-44. [29] 邸继征. 小波分析原理[M]. 北京: 科学出版社, 2010. [30] 上海计量测试 钱 J. 激光超声检测技术及其应用 [J]. (1): 4-7. doi: 10.3969/j.issn.1673-2235.2003.01.001 Qian Menglu. Laser ultrasonic technigue and its applications [J]. Shanghai Measurement and Testing, 2003, 30(1): 4-7. (in Chinese) doi: 10.3969/j.issn.1673-2235.2003.01.001 [31] 王杰. 层压复合材料激光超声检测的特征提取及成像方法研究[D]. 太原: 中北大学, 2020. Wang Jie. Research on feature extraction and imaging method using laser ultrasonic of laminated composites[D]. Taiyuan: North University of China, 2020. (in Chinese) [32] Zymnis A, Boyd S, Candes E. Compressed sensing with quantized measurements [J]. IEEE Signal Processing Letters, 2009, 17(2): 149-152. doi: 10.1109/LSP.2009.2035667 [33] Xu Zhiqiang. Compressed sensing: A survey [J]. Scientia Sinica Mathematica, 2012, 42(9): 865-877. doi: 10.1360/012011-1043 [34] Elad M. Optimized projections for compressed sensing [J]. IEEE Transactions on Signal Processing, 2007, 55(12): 5695-5702. doi: 10.1109/TSP.2007.900760 [35] Tsaig Y, Donoho D L. Extensions of compressed sensing [J]. Signal Processing, 2006, 86(3): 549-571. doi: 10.1016/j.sigpro.2005.05.029 [36] Gilbert A C, Strauss M J, Tropp J A, et al. Algorithmic linear dimension reduction in the l_1 norm for sparse vectors [J]. arXiv, 2006: cs/0608079. [37] Jiang Z, Zhang T, Huang X, et al. Trade-off relations of l_1-norm coherence for multipartite systems [J]. Quantum Information Processing, 2020, 19: 92. doi: 10.1007/s11128-020-2588-8 [38] Karkanitsa A V. Models, algorithms, and architecture for generating adaptive decision support systems [J]. Pattern Recognition and Image Analysis, 2020, 30(2): 174-183. doi: 10.1134/S1054661820020066 [39] Figueiredo M A T, Nowak R D, Wright S J. Gradient projection for sparse reconstruction: Application to compressed sensing and other inverse problems [J]. IEEE Journal of Selected Topics in Signal Processing, 2007, 1(4): 586-597. doi: 10.1109/JSTSP.2007.910281 [40] Ni C Y, Chen C, Ying K N, et al. Non-destructive laser-ultrasonic Synthetic Aperture Focusing Technique (SAFT) for 3D visualization of defects [J]. Photoacoustics, 2021, 22: 100248. doi: 10.1016/j.pacs.2021.100248 [41] 陈楚, 应恺宁, 刘念, et al. 相移迁移法在激光超声合成孔径聚焦技术中的应用 [J]. 48(3): 11. doi: 10.3788/CJL202148.0304001 Chen Chu, Ying Kaining, Liu Nian, et al. Application of phase shift migration method in laser ultrasonic SAFT [J]. Chinese Journal of Lasers, 2021, 48(3): 0304001. (in Chinese) doi: 10.3788/CJL202148.0304001 [42] 沈中华, 袁玲, 张宏超, 等. 固体中的激光超声[M]. 北京: 人民邮电出版社, 2015. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 303
- HTML全文浏览量: 147
- PDF下载量: 44
- 被引次数: 0

