






-
海上升压站由于其地理位置的特殊性,使其设备维护、常规检查等任务难度加大且耗时耗力。由于海上升压站结构固定,空间紧凑,较适合选用挂轨机器人进行巡检作业。挂轨机器人搭载具有上下升降功能的全方位云台,安装可见光相机实现对室内各设备的近距离全方位巡检。升压站中使用的工业仪表大部分为数字式仪表。数字式仪表具有读数准确方便、测量速度快、能提供数字信号输出、方便进行目视观察和数字记录等优点,在升压站的机房中也被大量应用。然而,海上升压站距离海岸远,工作环境不适合人工采集,亟需开发自动读数识别算法。
海上升压站的数字式仪表数字识别是自动巡检中的重要任务。数字式仪表识别的方法经过多年的发展,在这一领域也取得了一些进展。国内较早开始数字仪表识别的是段会川等[1],提出了一种基于模糊理论的仪表数字识别方法,构建了一种基于模糊算法的数字识别器,能够快速进行数字的识别,但对采集图片的质量要求较大,对于倾斜图像不具备较好的分割效果,进而可能会造成数字的残缺,影响识别效果。郭爽[2]、卢卫娜等[3]都是用模板匹配的方法进行数字识别,针对参考文献[2]中传统的模板匹配方法对因干扰稍有变形、位移、旋转的图像难以判别的问题,参考文献[3]中提出了一种改进的标准模板匹配方法,对每类数字的各种干扰进行细分,制作多个模板进行匹配,在一定程度上降低了因干扰而带来的识别误差,但制作的模板数量大大增加,使方法复杂度增加。李素萍[4]提出了一种基于图像处理技术的数字仪表识别方法,利用模式识别的方法对数字进行识别,对于比较清晰、完整、竖直的数字具有很好的识别率。近年来,深度学习的神经网络发展迅速,在数字式仪表识别领域引入了卷积神经网络(Convolu-tional Neural Network,CNN)[5],它对于单个数字的识别效果较好,但对于干扰较多的数字式仪表的数字识别,准确率较低。目前应用比较多的目标检测算法包括RCNN(Regions with CNN features)[6]系列、YOLO(You Only Look Once)[7]系列、SSD(Single Shot Multibox Detector)[8]等,它们在一些大目标、轻量化的应用场景中前景广阔,具有较高的精确度,但对于一些尺度较小的目标检测有所缺陷。
海上升压站的内部结构较适合使用挂轨机器人,机器人可对数字式仪表进行定位拍摄,在一定程度上减少外在环境的干扰,同时数字式仪表图像数字像素信息少,数字间的粘连大而造成分割较难。针对以上的问题,提出了基于Mask-RCNN网络的数字仪表识别方法,Mask-RCNN网络在Faster-RCNN的基础上增加了一个FCN语义分割网络分支,用于对目标进行像素级的语义分割。用ROI Align层替换ROI Pooling层,取消了量化操作,避免了量化引入的误差,提升了精度。同时使用基于残差网络ResNet101和特征金字塔网络(Feature Pyramid Network, FPN)[9]共同组成的特征提取网络替代CNN特征提取网络,优化了目标检测中的多尺度问题,提高了小物体、像素信息少等目标的检测性能。
-
基于模板匹配的数字识别方法[3]首先是对采集的图像进行直方图增强、滤除噪声等预处理,然后构建改进的仪表数字模板,进行数字的识别。整个过程较为复杂,需要构建多个模板,同时若采集到的数字出现变形、位移、旋转等情况,会造成数字难以被识别,可靠性较低。
-
由于仪表数字大多是由七段数码管组合而成的,只有横竖的布置方式,可以用基于穿线法进行仪表数字的特征识别[10]。该方法通过图像预处理、数字的定位进行分割,再将分割的单个数字使用穿线识别法进行数字的识别。该方法较其他方法原理简单,但对数字分割要求过高,数字在比较规整的条件下才会有较好的识别效果,且不能识别小数点。
-
机器学习是模式识别的重要方法。将采集到的图片经过倾斜校正、形态学处理、基于连通域的方法来进行数字的定位与分割,最后将分割后的单个字符使用LSSVM算法识别仪表数字[11]。机器学习的方法相比前两种方法有着更好的适应性和识别率。
-
近年来,计算机视觉发展迅速,基于深度学习的目标检测方法逐渐成为主流方法。目前常用的目标检测深度学习算法有YOLO系列和R-CNN系列算法。YOLO算法在大目标、轻量化的场景中具有较好的检测效果,同时具有较快的检测速度,但对小目标的检测效果不是很好。R-CNN网络在检测的精度方面具有较好的效果,Mask-RCNN网络采用特征金字塔网络进行多维度特征提取,同时增加了一个FCN语义分割网络,在完成目标定位和分类的同时,实现对目标轮廓像素级的语义分割,大大提高了目标检测的精度,但同时减弱了目标检测的速度。文中主要针对深度学习方法用于数字识别开展应用研究。
-
由于数字式仪表屏幕大多数是由液晶制作成的,在阳光、灯光等其他光照条件的照射下,屏幕易发生反光,造成数字的过亮或者过暗,或者数字模糊、亮度不均衡等问题。同时挂轨机器人对数字式仪表的图像采集中,由于拍摄角度不同,采集到的图像可能会存在一定的倾斜。亮度不均衡、倾斜等问题都会影响数字式仪表数值的识别,为了减弱这种影响,提高识别的精度,需要对采集到的图像进行预处理。
-
实验使用Gray World算法[12]来减弱因光照等因素引起的数显区域亮度不均衡的情况。人的视觉系统具有颜色恒常性,能从变化的光照环境和成像条件下获取物体表面颜色的不变特性,但成像设备不具有这样的调节功能,不同的光照环境会导致采集的图像颜色与真实颜色存在一定程度的偏差,需要选择合适的颜色校正算法,消除光照环境对颜色显现的影响。
Gray World算法以灰度世界假设为基础,该假设认为:对于一幅有着大量色彩变化的图像,其R,G,B 3个分量的平均值趋于同一灰度值。从物理意义上讲,灰色世界法假设自然界景物对于光线的平均反射的均值在总体上是个定值,这个定值近似地为“灰色”。颜色平衡算法将这一假设强制应用于待处理图像,可以从图像中消除环境光的影响,获得原始场景图像。该算法的具体步骤如下。
(1) 求反射均值
$ \overline {Gray} $ $$ \overline {Gray} = \frac{{\overline R + \overline G + \overline B }}{3} $$ (1) 式中:
$ \overline R $ ,$ \overline G $ ,$ \overline B $ 为彩色图像在R,G,B,3个色彩通道上的亮度平均值;(2) 通过步骤(1)计算得到的3个色彩通道亮度的平均值,计算R,G,B 3个通道的增益系数
${k_{{r}}}$ ,${k_{{g}}}$ ,${k_{{b}}}$ ,计算公式为:$ {K_r} = \dfrac{{\overline {Gray} }}{{\overline R }} $ ;$ {K_g} = \dfrac{{\overline {Gray} }}{{\overline G }} $ ;$ {K_b} = \dfrac{{\overline {Gray} }}{{\overline B }} $ ;(3) 根据Von- Kries对角模型,对于图像中的每个像素C,调整其R,G,B分量为:
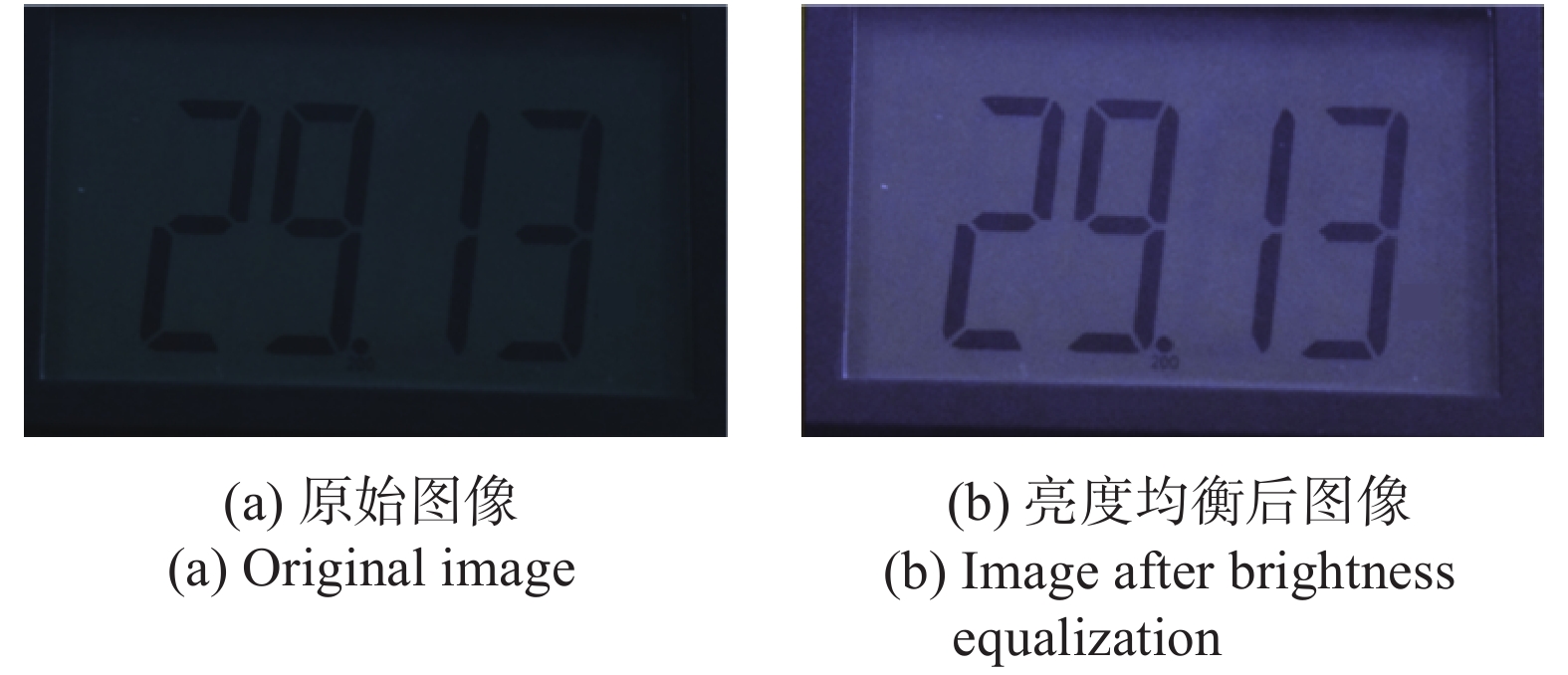
$$ \left\{ \begin{gathered} C(R') = C(R)\times{k_r} \hfill \\ C(G') = C(G)\times{k_g} \hfill \\ C(B') = C(B)\times{k_b} \hfill \\ \end{gathered} \right. $$ (2) 通过GrayWorld算法得到亮度均衡后的图像,使数显区域的数字更加清晰。在一定程度上减弱了因不同光照条件下对图像数显区域成像效果的影响,提高了识别的准确度。GrayWorld算法进行亮度均衡前后的图像如图1所示。
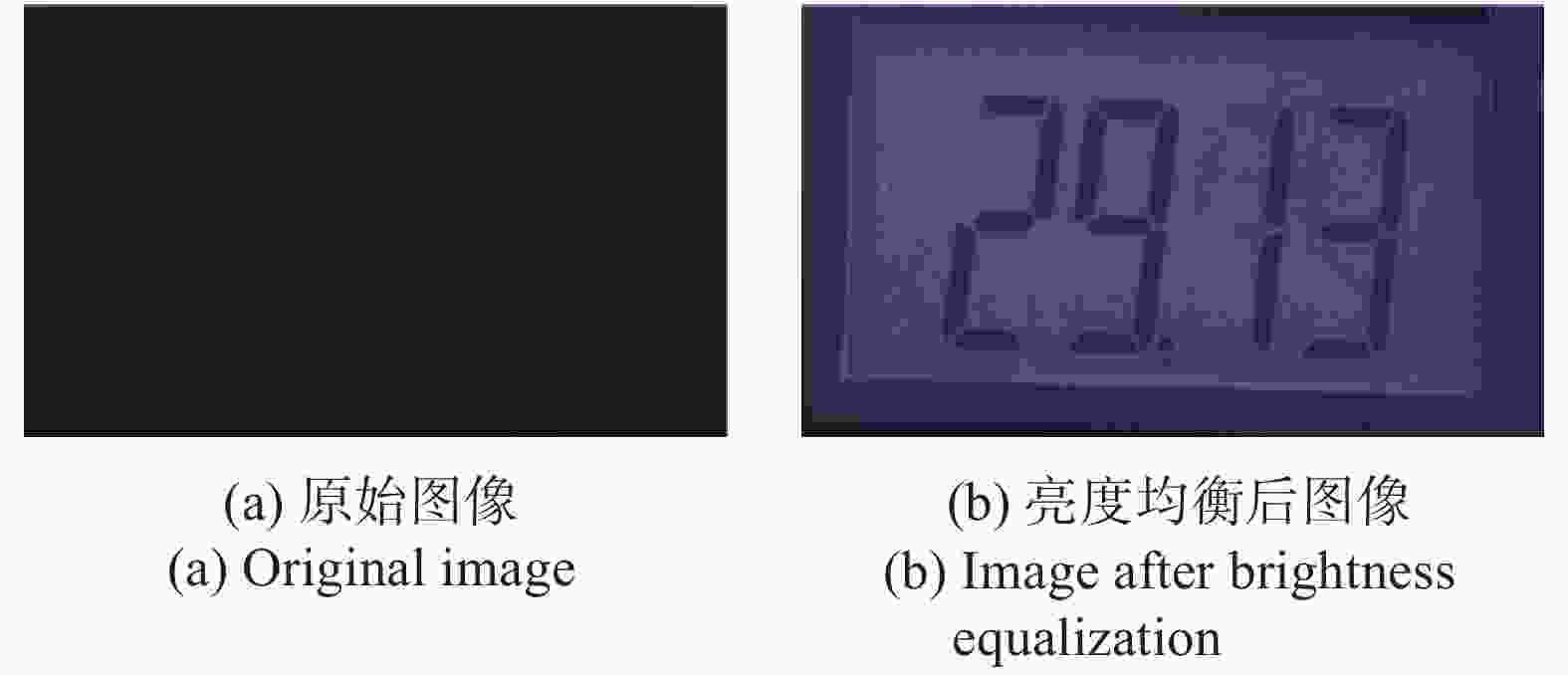
图 1 GrayWorld算法亮度均衡前后图像
Figure 1. Images before and after brightness equalization with GrayWorld algorithm
-
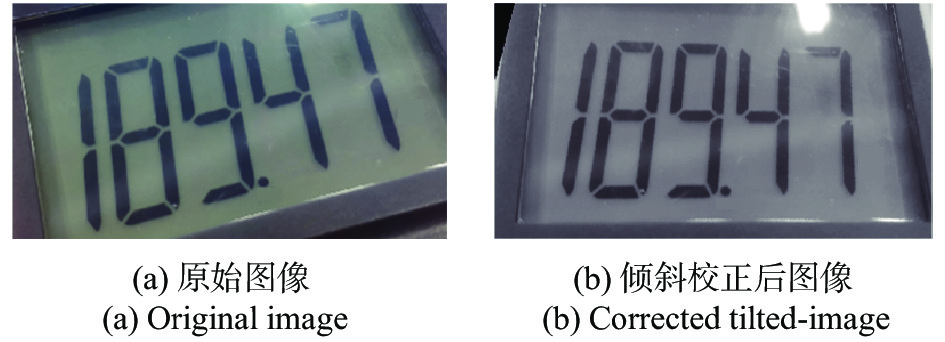
实验采用Canny算子进行数显区域的边缘检测,采用 Hough 变换获取数显区域边框的倾斜角,然后再采用旋转函数对图像进行校正[13]。
采集到的数字式仪表图像中,数显区域的上下边界存在两条平行直线,将平行线与边框的夹角设定为倾斜角,即为采集图像的倾斜角。因为数字式仪表图像中数显区域的边框是最长的一条直线,所以通过累加器计算Hough 变换得到的最大值对应的
$ (\rho ,\theta ) $ ,由此得到采集图像所对应的倾斜角度。倾斜图像转换为端正图像的效果如图2所示。
图 2 校正倾斜图像的实验效果
Figure 2. Corrected tilted-image experiment effect
-
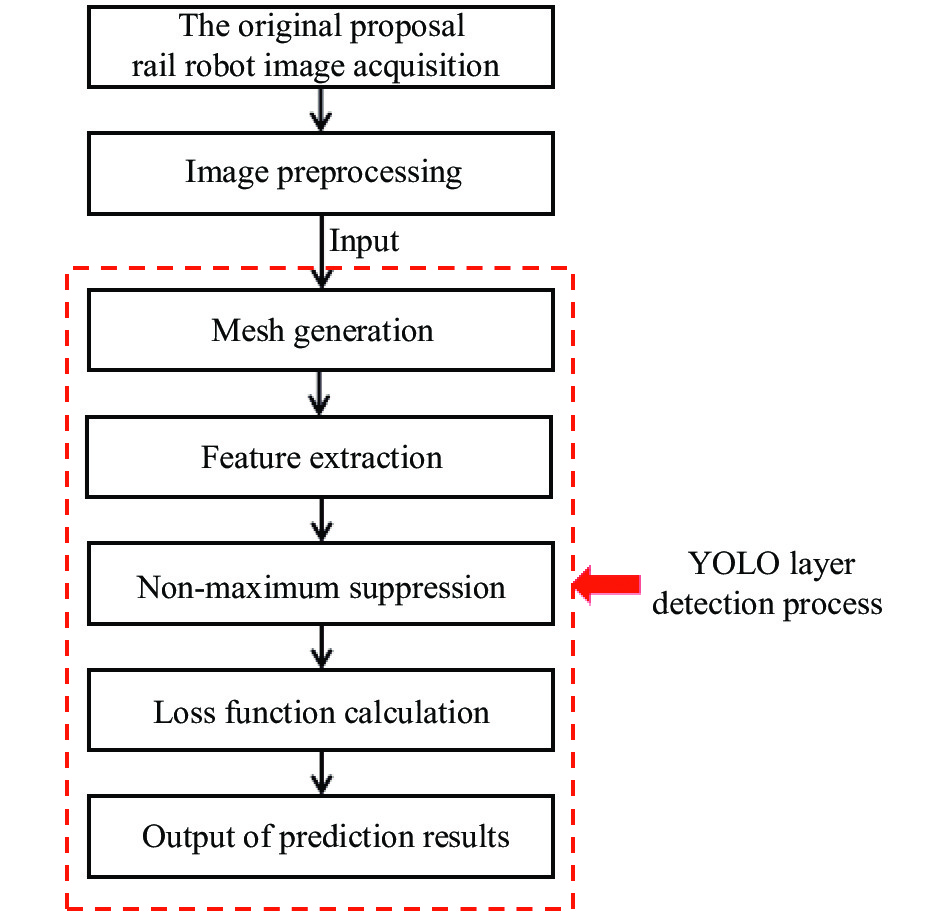
YOLOv3检测算法[14]于2018年被首次提出,将一个图像输入网络,就可以得到图像中目标的位置和它们的类别以及相应的置信度。它的训练和检测、特征提取、分类回归都是在一个网络中完成的,真正实现端到端的目标识别。由于海上升压站仪表位置固定,挂轨机器人根据位置坐标对数显区域进行图像采集,输入到YOLOv3网络进行数字识别。数字识别流程如图3所示。

图 3 YOLOv3数字识别流程
Figure 3. YOLOv3 digital identification process
数字式仪表识别步骤如下:
(1)预处理。通过对图像进行预处理减弱因外界环境对数字识别的误差。
(2)输入一张任意大小图片,将图像的分辨率缩放至a×b,通道数为3的RGB图像,将生成的新图像作为网络输入input。
(3)卷积神经网络特征提取。YOLOv3的卷积神经网络(CNN)把图像划分成S×S个网格(grid cell)。YOLOv3进行多尺度预测,输出有3层的feature maps,每层feature maps有S×S个网格,分别为13×13、26×26和52×52,每个网格负责去检测那些中心点落在该格子内的目标。特征图的输出维度为
$ S\times S\times \left[3\times (5+11) \right] $ ,S×S为输出特征图点数,一共3个anchor框,每个框有4维预测框数值$ ({t_x},{t_y},{t_w},{t_h}) $ ,1维预测框置信度,11维物体类别数。预测框的置信度Confidence用公式表示为:
$$ {\rm{Confidence}} = {P_{{r}}}(Object)\times IOU_{pred}^{truth} $$ (3) $$ IOU_{pred}^{{{truth}}} = \frac{{area(t) \cap area(p)}}{{area(t) \cup area(p)}} $$ (4) 式中:Pr为目标bounding box内存在目标的概率;
$ IOU_{pred}^{truth} $ 为真实框和预测框面积的交并比;area(t)为真实框的面积;area(p)为预测框的面积。(4)非极大值抑制。YOLOv3对于每个单元格有3个预测框,通过非极大抑制方法,设置一个Score的阈值,低于该阈值的预测框置信度设置为0,遍历每一个对象类别,选择得分最高的作为输出,与该输出重叠的去掉,不断重复这一过程直到所有预测框处理完。在每个网格中,对象
$ {C_{\rm{i}}} $ 位于第j个bounding box的得分为:$$ {\rm{Score}}{_{ij}} = {P_r}({C_i}|Object) \times {\rm{Confidence}}{e_j} $$ (5) (5)损失函数[15]。YOLO网络的损失函数由3部分构成,分别是预测框和真实框的尺寸误差、预测框和真实框的置信度误差、分类误差。
预测框和真实框的尺寸误差loss1用公式表示为:
$$ \begin{gathered} {\rm{loss}}1 = {\lambda _{coord}}\sum\limits_{i = 0}^{S \times S} {\sum\limits_{j = 0}^B {I_{ij}^{obj}} } (2 - {w_i} \times {h_i})\times \hfill \\ \left[ {{{({x_i} - {{\hat x}_i})}^2} + {{({y_i} - {{\hat y}_i})}^2} + {{({w_i} - {{\hat w}_i})}^2} + {{({{{h}}_i} - {{\hat h}_i})}^2}} \right] \hfill \\ \end{gathered} $$ (6) 预测框和真实框的置信度误差loss2用公式表示为:
$$ {\rm{loss}}2 = \sum\limits_{i = 0}^{S \times S} {\sum\limits_{j = 0}^B {I_{ij}^{obj}({c_i}} } - {\hat c_i}{)^2} + {\lambda _{noobj}}\sum\limits_{i = 0}^{S \times S} {\sum\limits_{J = 0}^B {I_{ij}^{noobj}{{({c_i} - {{\hat c}_j})}^2}} } $$ (7) 分类误差loss3用公式表示为:
$$ {\rm{loss}}3 = \sum\limits_{i = 0}^{S \times S} {I_{ij}^{obj}} \sum\limits_{C \in classes} {({p_i}} (C) - {\hat p_i}(C){)^2} $$ (8) YOLO网络总的损失函数为:loss=loss1+loss2+loss3。
-
Mask-RCNN框架是由Facebook人工智能研究小组提出的端到端CNN,是基于Faster-RCNN的网络结构改进而来的,其框架结构简单易操作,且识别精度指标十分优越,适合数字式仪表图像识别这类像素特征较少、读数精度需求高的任务。其网络结构如下[16]:
(1)图片采集,由于Mask-RCNN对硬件性能需求较高,需要将挂归机器人采集的图片通过局域网传入终端服务器进行处理。
(2)图片的预处理,同2.2节处理,这里不再赘述。
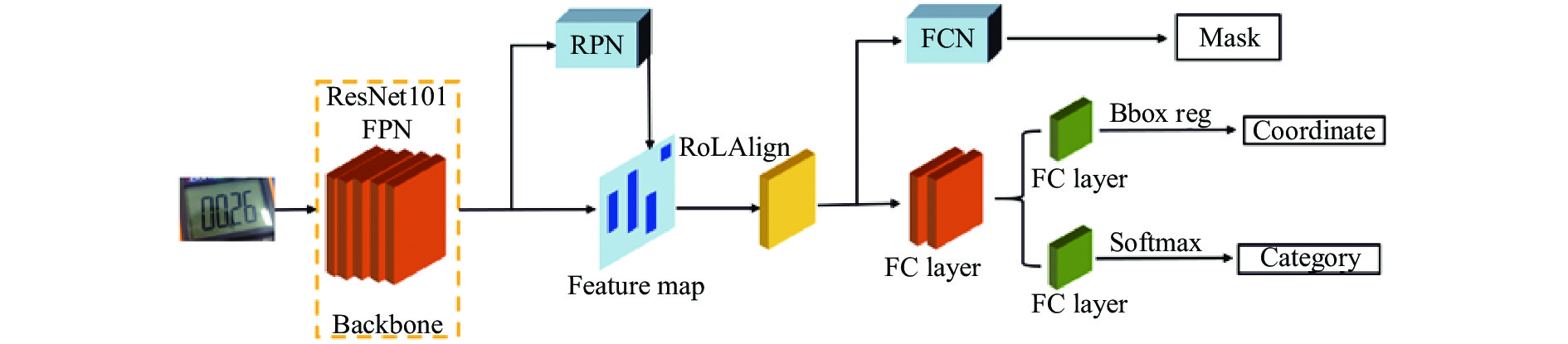
(3)输入预处理后的图片,使用FPN网络进行特征提取。网络结构如图4所示。基本特征提取由ResNet(残差网络)完成,ResNet通过 4个block进行特征提取、输出及保存,构成list 1,对list1中c5进行上采样,生成list2 [p2,p3,p4,p5,p6]。对生成的feature map中每一点设定预定ROI,从而获得多个候选ROI。
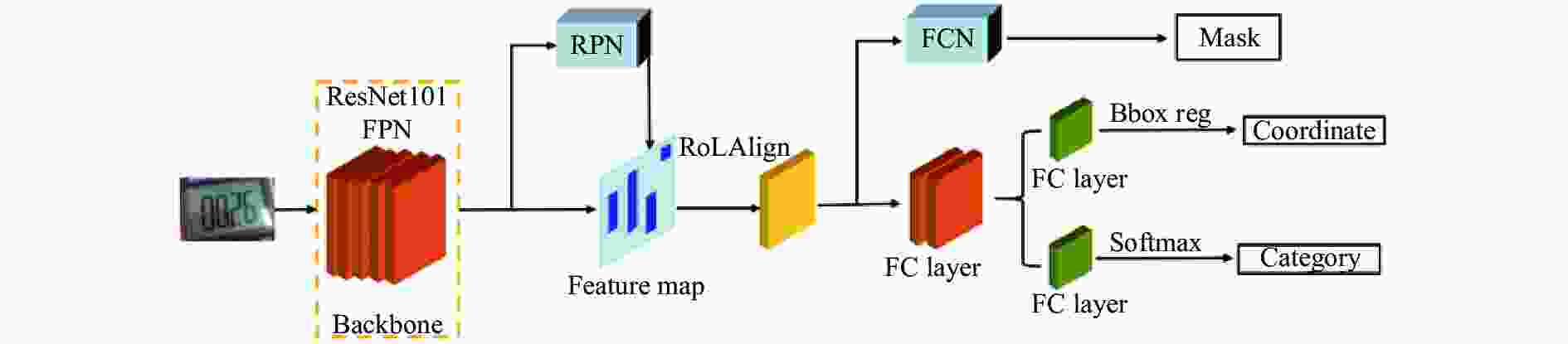
图 4 Mask-RCNN结构
Figure 4. Mask-RCNN structure
(4)将候选ROI送入RPN网络二值分类,通过RPN生成目标矩阵块,过滤掉部分ROI。将list2依次输入并输出,得到不同尺度proposaks box(候选区域)。基于anchor预测中心偏差及长宽偏差,得到与真实窗口相近的回归窗口,如图5所示。
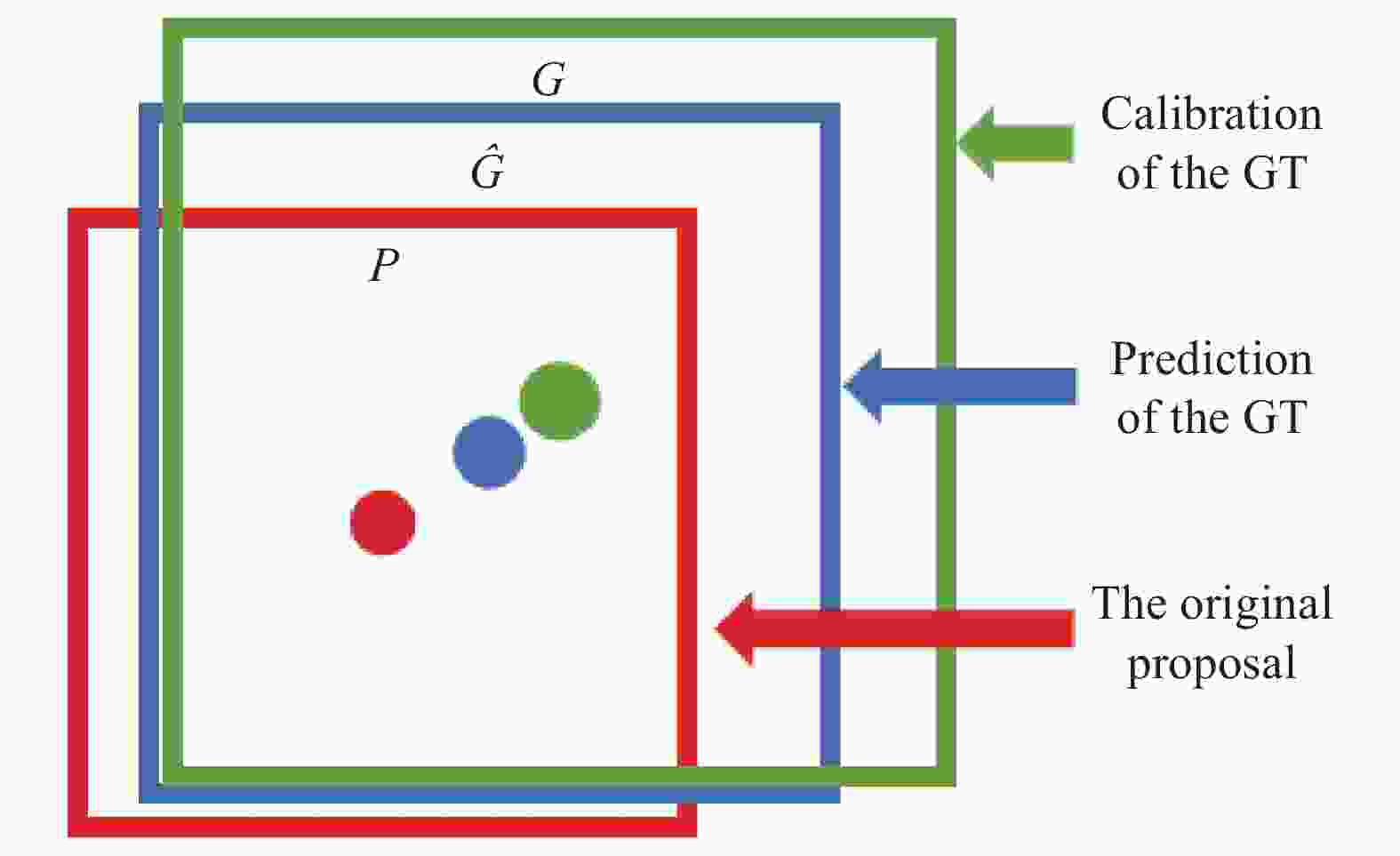
图 5 回归窗口
Figure 5. Return to the window
边框回归公式如下:
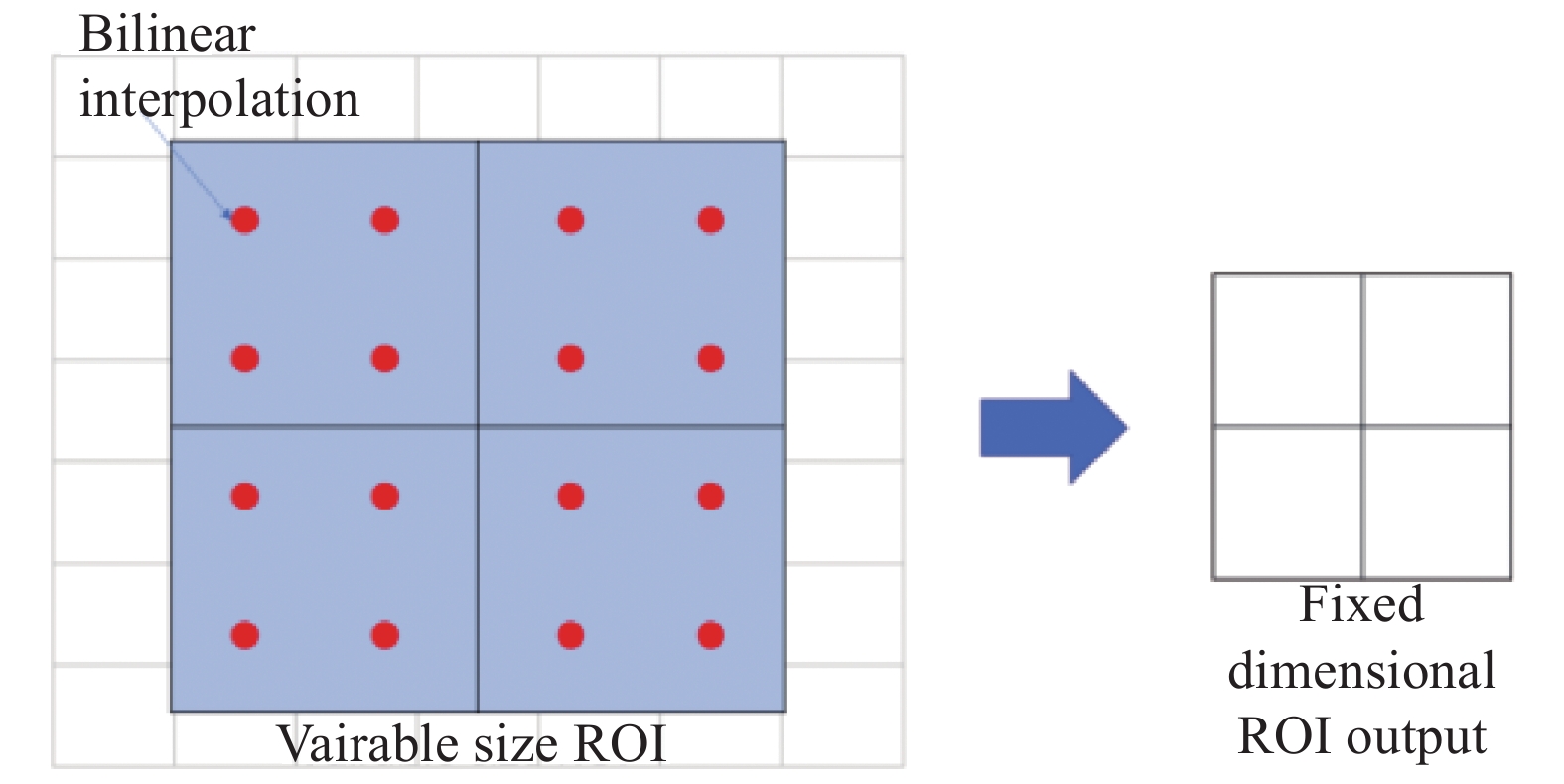
$$ (\Delta {{x,}}\Delta {{y),}}\Delta {{x}} = {p_{{W}}}{d_x}(p),\Delta y = {p_h}{d_y}(p) $$ (9) $$ \begin{gathered} {{\hat G}_{{x}}} = {p_w}{d_x}(p) + {p_x} \hfill \\ {{\hat G}_{{y}}} = {p_h}{d_y}(p) + {p_y} \hfill \\ \end{gathered} $$ (10) (5)通过ROI Align层,将相应区域池化为固定尺寸的特征图,从而进行后续的分类和包围框回归操作。ROI Align是一种区域特征聚集方式,工作原理如图6所示。它取消了量化操作,使用双线性内插的方法[17]获得坐标为浮点数的像素点上的图像数值,最终将ROI再通过bbox进行边框回归以及softmax分类器进行分类。

图 6 Feature map图示
Figure 6. Feature map graphic
双线性内插的计算公式为:
$$ \begin{split} \\ f({R_1}) \approx \frac{{{x_2} - x}}{{{x_2} - {x_1}}}f({Q_{11}}) + \frac{{x - {x_1}}}{{{x_2} - {x_1}}}f({Q_{21}}) \hfill \\ \begin{array}{*{20}{c}} {}&{\rm where\begin{array}{*{20}{c}} {}&{{R_1}} \end{array}} \end{array} = (x,{y_1}) \hfill \\ f({R_2}) \approx \frac{{{x_2} - x}}{{{x_2} - {x_1}}}f({Q_{12}}) + \frac{{x - {x_1}}}{{{x_2} - {x_1}}}f({Q_{22}}) \hfill \\ \begin{array}{*{20}{c}} {}&{\rm where\begin{array}{*{20}{c}} {}&{{R_2}} \end{array}} \end{array} = (x,{y_2}) \hfill \end{split} $$ (11) (6) Mask层也是Mask-RCNN网络中特有部分,在Mask分支上,添加FCN网络,对每个RoI的分割输出维数为K×m×m(其中:m表示RoI Align特征图的大小),即K个类别的m×m的二值Mask;保持m×m的空间布局,pixel-to-pixel操作需要保证RoI特征映射到原图的对齐性,这也是使用RoIAlign解决对齐问题的原因,能够减少像素级别对齐的误差,这种方式能够有效提高实例分割的效果。Mask-RCNN的损失函数由3项损失函数组成,包括分类误差、回归误差和分割误差,总的损失函数表达式为:
$$ {\rm loss} = {\rm loss}{_{cls}} +{\rm loss}{_{reg}} + {\rm loss}{_{mask}} $$ (12) -
实验在内存为32 G的Windows10专业版64位操作系统中进行, CPU处理器为Intel Xeon E5-2687Wv4,GPU处理器为NVIDIA GeForce GTX Titan-X,选取TensorFlow作为学习框架。
-
数字式仪表数据:此次实验使用的数据集均为实测数据,该数据集包括:0~9和小数点共11类,每类各300张做训练集和30张做测试集。数据集中包括不同角度、不同距离、不同光照强度的数据。数据集如图7所示。

图 7 部分数据集
Figure 7. Partial data set
YOLOv3的数据集使用labelimg软件进行标注,标注标签为0~9和小数点共11类,数据集格式为VOC格式。训练Mask-RCNN需要原始图像,还要与之相对应的掩模信息,因此先使用Labelme工具进行数据标注和掩模制作,数据标注方式为手动标注,数据集格式为COCO格式。实验数据标签为0~9和小数点共11类,相较于传统数字式仪表识别算法,Mask-RCNN算法是针对每个像素的语义分割,大大提高了数字识别的准确度。
-
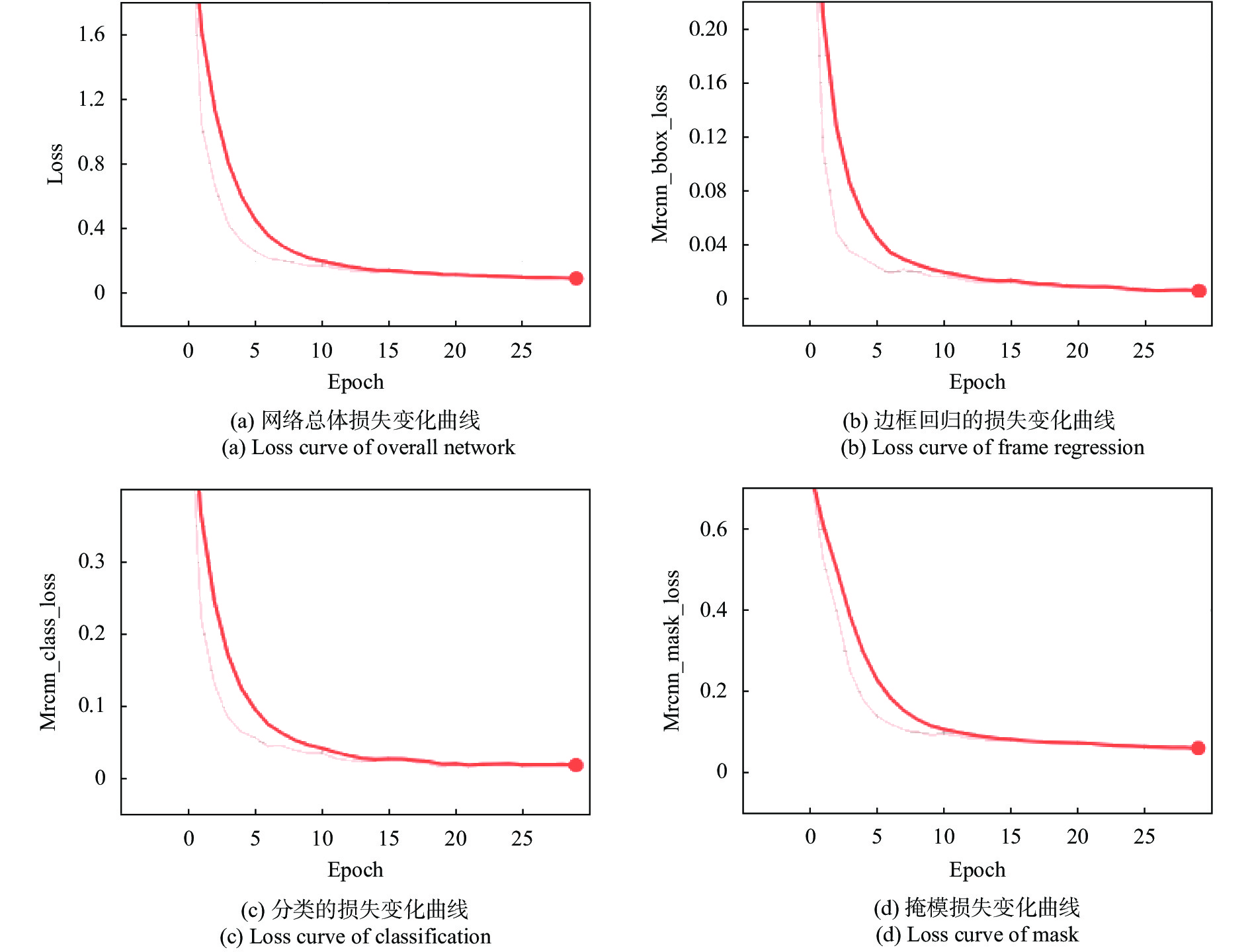
使用Mask-RCNN网络在数据集上训练的损失函数变化曲线如图8所示。图8(a)为网络的总体损失变化曲线;图8(b)为边框回归的损失变化曲线;图8(c)为掩模的损失变化曲线;图8(d)为分类损失变化曲线。图中横坐标表示网络权重更新的次数。

图 8 损失变化曲线
Figure 8. Loss function curve
表1为实验数据集通过两种不同方法的识别率和耗时。YOLOV3是一种基于深度神经网络的对象识别和定位算法,其最大的特点是运行速度快,可以用于实时系统,但对小目标的检测精度不是很好。Mask-RCNN在Faster-RCNN的基础上增加了一个分支用于分割任务,对于每个Proposal Box都要使用FCN进行语义分割,分割任务与定位、分类任务是同时进行的,同时引用ROI Align代替ROI Pooling提高了其检测的精度。此次实验采用这两种方法对数字仪表数字集进行识别,实验结果如图9所示。
表 1 不同识别方法在数据集上的比较
Table 1. Comparison of different recognition methods on data sets
Model Test set
/frameAccuracy Time consuming/ms YOLOv3 100 99.03% 20.2 Mask-RCNN 100 99.52% 212 
图 9 实验结果图
Figure 9. Experimental result diagram
-
针对海上升压站距离海岸远,工作环境复杂,人工采集数字式仪表数值较困难的问题,文中分别使用YOLOv3算法和Mask-RCNN算法对数字式仪表进行数字识别。先将采集到的图片进行预处理,对图像进行校正,然后输入到检测网络中进行特征提取、分类和回归,同时将置信度标注要图像上。经过对比分析发现,YOLOv3算法进行数字识别具有耗时短的优势,可用于需要实时检测的工程中,而Mask-RCNN算法进行数字识别具有精度高的优势,但检测速度较慢,可用于对精度有较高要求的工程中。
Automatic recognition algorithm of digital instrument reading in offshore booster station based on Mask-RCNN
-
摘要: 海上升压站采用挂轨机器人开展巡检作业,利用机器视觉手段自动识别数字式仪表读数,替代人工记录。提出了一种基于 Mask-RCNN深度学习方法的数字仪表读数自动识别算法。将不同类型的数字仪表原始图像制作成数据集,利用深度学习算法进行训练,根据损失函数变化曲线对算法进行参数优化得到训练后的模型,再进行数字仪表图像的识别分析。采用灰度世界算法和霍夫变换等算法进行图像预处理,可有效改善数字识别的准确度。最后,实验对比了YOLOv3和Mask-RCNN深度学习算法的识别性能,结果表明前者具有较高的检测速度,后者具有更高的准确率。后者的识别率为99.52%,满足海上升压站远程监控对数字仪表读数正确率高的要求。Abstract: The offshore booster station adopts the rail hanging robot to carry out patrol inspection, and the machine vision method is used to automatically identify the digital instrument reading instead of manual recording. An automatic recognition algorithm of digital instrument reading based on Mask-RCNN deep learning method was presented. The original images of different types of digital instruments were made into data sets, trained by deep learning algorithm, the parameters of the algorithm were optimized according to the change curve of loss function, the trained model was obtained, and then the digital instrument images were recognized and analyzed. The gray world algorithm and Hough transform were used for image preprocessing, which can effectively improve the accuracy of digital recognition. Finally, the recognition performance of YOLOv3 and Mask-RCNN deep learning algorithm was compared in the experiment. The results show that the former has higher detection speed and the latter has higher accuracy. The recognition rate of the latter is 99.52%, it meets the requirement that remote monitoring of offshore booster station requires high accuracy of digital instrument reading.
-
Key words:
- image processing /
- digital instrument recognition /
- Mask-RCNN /
- YOLOv3
-
图 1 GrayWorld算法亮度均衡前后图像
Figure 1. Images before and after brightness equalization with GrayWorld algorithm
表 1 不同识别方法在数据集上的比较
Table 1. Comparison of different recognition methods on data sets
Model Test set
/frameAccuracy Time consuming/ms YOLOv3 100 99.03% 20.2 Mask-RCNN 100 99.52% 212  下载: 导出CSV
下载: 导出CSV
-
[1] Duan Huichuan, Zhang Haibo, Zhang Shuguang, et al. Research on instrument digital recognition based on fuzzy theory [J]. Instrument Technique and Sensor, 2004(4): 37-39. (in Chinese) doi: 10.3969/j.issn.1002-1841.2004.04.018 [2] Guo Shuang. Research on automatic identification method of nixie tube digital instrument [J]. Communications Technology, 2004, 45(4): 37-39. (in Chinese) [3] Lu Weina, Liu Changrong, Zheng Yucai, et al. A digital instrument character recognition method based on template matching [J]. Modern Computer, 2008(3): 70-72, 86. (in Chinese) doi: 10.3969/j.issn.1007-1423-B.2008.03.024 [4] Li Suping. Digital instrument recognition technology based on image processing [J]. Mechanicaland Electronical Engineer-ing, 2013, 19(6): 84-86, 90. (in Chinese) doi: 10.3969/j.issn.1007-080x.2013.06.017 [5] Akula A, Singh A, Ghosh R, et al. Target recognition in infrared imagery using convolutional neural network[C]//Proceedings of International Conference on Computer Vision and Image Processing, 2017. [6] Girshick R, Donahue J, Darrell T, et al. Rich feature hierarchies for accurate object detection and semantic segmen-tation[C]//CVPR. IEEE, 2014. [7] Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection[C]//Computer Vision & Pattern Recognition. IEEE, 2016. [8] Liu W, Anguelov D, Erhan D, et al. SSD: Single shot MultiBox detector[C]//European Conference on Computer Vision. Springer International Publishing, 2016. [9] Lin T Y, Dollar P, Girshick R, et al. Feature pyramid networks for object detection[C]// 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR). IEEE Computer Society, 2017. [10] Zhuo Lei, Zhou Lv, Yang Lihong. Numeral recognition of calculator based on threading method [J]. Software Engineering, 2018, 21(12): 1-3. (in Chinese) [11] Lin Jianping, Liao Yipeng. Automatic recognition of digital instrument reading based on OpenCV and LSSVM [J]. Microcomputer & its Applications, 2017, 36(2): 37-40. (in Chinese) [12] Guo Lanying. Han Ruizhi, Cheng Xin. Digital instrument recognition method based on deformable convolutional neural network [J]. Computer Science, 2020, 47(10): 187-193. (in Chinese) doi: 10.11896/jsjkx.191000035 [13] Liu Jing. Research on automatic character recognition of digital instrument based on image processing [J]. Information Technology, 2020, 44(4): 84-87, 91. (in Chinese) [14] Redmon J, Farhadi A. YOLOv3: An Incremental improvement [J]. arXiv e-prints, 2018: 1804.02767. [15] Gong An, Zhang Yang, Tang Yonghong. Identification method of electric energy representation based on yolov3 network [J]. Computer Systems & Applications, 2020, 29(1): 196-202. (in Chinese) [16] 何配林. 基于深度学习的工业仪表识别读数算法研究及应用[D]. 电子科技大学, 2020. He Peilin. Research and application of reading recognition algorithm for industrial instruments based on deep learning[D]. Chengdu: University of Electronic Science and Technology of China, 2020. (in Chinese) [17] Wang Sen, Yang Kejian. Research and implementation of image scaling algorithm based on bilinear interpolation [J]. Techniques of Automation and Applications, 2008(7): 44-45, 35. (in Chinese) doi: 10.3969/j.issn.1003-7241.2008.07.014 -

 点击查看大图
点击查看大图
图(9) / 表(1)
计量
- 文章访问数: 597
- HTML全文浏览量: 209
- PDF下载量: 61
- 被引次数: 0




























