










-
大气温度是研究大气温室效应、城市热岛效应、逆温层、地球重力波等典型问题的重要参数,是测量影响大气降水及气溶胶分布的相对水蒸气的必要参数[1]。研究探测精度高、时空分辨率高、环境适应性强、成本低的大气温度探测技术具有重要的科学意义和实际应用价值。测温激光雷达在探测高度、垂直跨度、空间分辨率、测量连续性和精度等方面具有明显的优势,是目前进行大气温度遥感探测的最有力工具之一[2]。激光雷达探测大气温度的方法主要有瑞利散射积分法[3]、差分吸收法[4]、瑞利散射光谱分析法[5~6]和转动拉曼散射法[1,7]等。瑞利散射积分法是通过直接探测大气密度,再利用气体状态方程得到大气温度分布,其只适合测量30 km以上的中层大气。差分吸收法对激光频率线宽和待测气体浓度稳定性要求高,测量精度较低、系统复杂、成本较高。瑞利散射光谱分析法对激光频率线宽和稳定性要求也很高,同时需借助高性能的干涉仪检测散射光谱信息以达到测量目的。转动拉曼散射法利用N2或O2气体分子的转动拉曼散射谱线强度与大气温度的依赖关系测量大气温度,但拉曼散射的信号强度比米和瑞利散射要低三四个数量级,需采用高功率激光器、大孔径望远镜及高精度高效率的分光镜以保证测量精度,系统复杂、成本高。
由此可见,除了瑞利散射积分法和转动拉曼散射法,传统的差分吸收法和瑞利散射光谱分析法都需采用窄线宽的单纵模激光源,但瑞利散射积分法不适用于低层大气温度测量,转动拉曼散射法需要高功率激光源。然而,目前要做到完全的单纵模输出,激光器大都采用种子注入技术[8],这样的激光系统不仅体积大、成本高,而且需要对谐振腔长及脉冲建立时间等参数进行精确控制,环境适应性较差,不利于测温激光雷达的实际推广应用。尤其是单纵模激光器会因为中心频率的缓慢漂移、环境噪音、激光棒温度变化或者振动干扰等原因导致种子注入特性变差,甚至注入不成功而不再成单纵模输出,这时的单纵模测温激光雷达将出现严重的测量误差,甚至不能工作[9~10]。
显然,测温激光雷达若能采用多纵模激光器作为发射光源,则既能实现激光发射系统低成本和小型化,同时无需对谐振腔精密控制,可明显提高激光雷达系统的稳定性和环境适应性[10]。更重要的是,若使所有纵模都能用于测量,则激光能量利用率将大大提高,可有效提高测温精度。目前,国内外学者已开展对多纵模高光谱分辨率气溶胶激光雷达[10-12]和多纵模测风激光雷达[13]的研究,但未见有对多纵模测温激光雷达的研究报道。文中主要探索基于双级联FPI的高光谱分辨率瑞利散射多纵模测温激光雷达技术,包括探测原理、理论分析、频率匹配和锁定要求及系统性能仿真分析。
-
基于双级联FPI和多纵模激光的大气温度探测原理如图1所示。采用一体化的双级联FPI,FPI-1和FPI-2的自由谱间距(FSR)相同,两者的频谱峰峰间隔为FSR的一半;发射多纵模激光的纵模间隔与FPI的FSR匹配,且各纵模的中心频率被锁定在FPI-1周期性频谱的峰值位置。多纵模脉冲激光发射至大气中,被气溶胶粒子和大气分子散射,其总的散射光谱相当于所有有序单纵模所产生的米散射谱和瑞利散射谱的叠加。由于气溶胶粒子质量大,其布朗运动引起的米散射谱展宽可以忽略,气溶胶米散射谱宽近似为发射激光谱宽;而大气分子质量小,其热运动引起的瑞利散射谱显著展宽,展宽量与大气温度的平方根成正比。

图 1 基于双级联FPI和多纵模激光的大气温度探测原理。(a) FPI-1分离米散射信号;(b) FPI-2透反射信号测温
Figure 1. Atmospheric temperature detection principle based on two-stage FPI and multi-mode laser. (a) Separation of Mie signals by FPI-1; (b) Temperature measurement using FPI-2 transmission and reflection signals
大气后向散射光先经过FPI-1,绝大部分米散射光和处在各个纵模瑞利散射谱中心的少量瑞利散射光透过FPI-1,如图1(a)所示。极少量的米散射光和处在各个纵模瑞利散射谱两翼的绝大部分瑞利散射光被FPI-1反射后,再经过FPI-2,不同大气温度下的瑞利散射光经过FPI-2后的透射信号明显不同,而反射信号几乎不变,因此透反射信号的比值将不同,如图1(b)所示。利用FPI-2透反射信号的比值与温度的函数关系,可以反演得到温度。FPI-1的主要作用是将瑞利散射光从总的后向散射光中分离出来,减小米散射光混入引起的温度测量误差。利用FPI-1的透反射信号可以反演获得后向散射比,并进一步用于修正温度反演结果。
-
根据前述温度探测原理设计的测温激光雷达接收系统光路如图2所示。假定入射至双级联FPI接收系统的总大气后向散射光子数为N0,包含分子瑞利散射光子数Nm和气溶胶米散射光子数Na。总后向散射光信号首先入射至FPI-1,绝大部分米散射信号和少量瑞利散射信号透过FPI-1,透射信号光子数为N1;极少量残余的米散射信号和大部分瑞利散射信号被FPI-1反射。FPI-1的反射信号再入射至FPI-2,透过FPI-2的光子数为N2;被FPI-2反射的光子数为N3。

图 2 基于双级联FPI和多纵模激光的测温激光雷达接收系统光路
Figure 2. Optical path of temperature lidar receiving system based on two-stage FPI and multi-mode laser
频率为ν的单色光平行光正入射至FPI-i (i=1, 2)的透反射率函数可分别表示为[14]:
$$ {h_i}(\nu - {\nu _i}) = {\eta _i}\left\{ {1 + 2\sum\limits_{n = 1}^\infty {R_{e,i}^n\cos \left[ {\frac{{2\pi n(\nu - {\nu _i})\cos \theta }}{{{\nu _{FSR}}}}} \right]} } \right\} $$ (1) $$ {g_i}(\nu - {\nu _i}) = C - {\mu _i}{h_i}(\nu - {\nu _i}) $$ (2) 式中:ηi=Tp,i(1−Re,i)/(1+Re,i)为FPI-i的平均透过率,Re,i为其平板有效反射率,Tp,i =[1−A/(1−Ri)]2 (1−Ri)·(1+Re,i)/(1+Ri)(1−Re,i)为其峰值透过率,Ri和A分别为其平板实际反射率和吸收损耗系数;μi=(1−RiC)/(C−Ri),C=1−A;νi和νFSR分别为FPI-i的中心频率和自由谱间距。
多纵模激光入射到大气中后,每一个纵模激光与单纵模激光一样,都会受到大气分子和气溶胶散射,后向散射光出现谱线增宽。因此,多纵模激光的回波信号将是每一条单纵模展宽谱线叠加的结果。多纵模中的每一条单纵模谱线的回波函数仍可用高斯线型近似。各个纵模强度受到激光介质增益曲线的调制。因此,归一化的多纵模激光总的回波谱函数为[10]:
$$ {G_x}(\nu ) = \dfrac{{\displaystyle\sum\limits_q {{C_q}} \exp \left[ { - {{(\nu - {\nu _0} - q\varLambda )}^2}/\Delta \nu _x^2} \right]}}{{\displaystyle\sum\limits_q {{C_q}} \Delta {\nu _x}\sqrt \pi }} $$ (3) 式中:x=a, m分别表示气溶胶米散射和分子瑞利散射;Δva=δv/(4 ln2)1/2为单个纵模米散射谱1/e高度处谱宽,δv为发射激光单个纵模的半高谱宽; Δvm=(Δva2+Δvr2)1/2为单个纵模瑞利散射谱1/e高度处谱宽;Δvr=(8 kT/Mλ2)1/2为瑞利散射谱增宽量,k为玻耳兹曼常数,T为大气温度,M为大气分子平均质量,λ为发射激光波长;q为以选定的中心频率ν0(中心频率的q为0)为参考的纵模序数; Λ为纵模间隔;Cq为各纵模谱线的相对强度(规定中心频率处相对强度取1)。
经准直镜准直后,全发散角为2θ0的米和瑞利散射光入射至双级联FPI,各接收通道的米和瑞利散射信号光学透过率分别为:
$$ {T_{1x}}({\nu _0}) = 2\theta _0^{ - 2}\int_{ - \infty }^{ + \infty } {\int_0^{{\theta _0}} {{G_x}(\nu ){h_1}(\nu - {\nu _1})\sin \theta {\rm{d}}\theta } } {\rm{d}}\nu $$ (4) $$ {T_{2x}}({\nu _0}) = 2\theta _0^{ - 2}\int_{ - \infty }^{ + \infty } {\int_0^{{\theta _0}} {{G_x}(\nu ){g_1}(\nu - {\nu _1}){h_2}(\nu - {\nu _2})\sin \theta {\rm{d}}\theta } } {\rm{d}}\nu $$ (5) $$ {T_{3x}}({\nu _0}) = 2\theta _0^{ - 2}\int_{ - \infty }^{ + \infty } {\int_0^{{\theta _0}} {{G_x}(\nu ){g_1}(\nu - {\nu _1}){g_2}(\nu - {\nu _2})\sin \theta {\rm{d}}\theta } } {\rm{d}}\nu $$ (6) 公式将(1)~(3)代入公式(4)~(6)积分得:
$$ {T_{1x}}({\nu _0}) = {\eta _1}(1 + 2{\sigma _{1x}}) $$ (7) $$ \begin{split} {T_{2x}}({\nu _0}) =& C{\eta _2}(1 + 2{\sigma _{2x}}) - \\ & {\mu _1}{\eta _1}{\eta _2}\left[ {1 + 2({\sigma _{1x}} + {\sigma _{2x}} + \sigma _{12x}^ + + \sigma _{12x}^ - )} \right] \\ \end{split} $$ (8) $$ {T_{3x}}({\nu _0}) = {C^2} - C{\mu _1}{T_{1x}}({\nu _0}) - {\mu _2}{T_{2x}}({\nu _0}) $$ (9) 其中
$$ \begin{split} {\sigma _{ix}} =& \sum\limits_q {\sum\limits_{n = 1}^\infty {{C_q}R_{e,i}^n} \cos \left[ {\frac{{2\pi n({\nu _0} + q\varLambda - {\nu _i})}}{{\nu _{FSR}'}}} \right]\exp \left[ { - {{\left( {\frac{{\pi n\Delta {\nu _x}}}{{\nu _{FSR}'}}} \right)}^2}} \right]} \cdot \\ & {\rm sinc}\left[ {\frac{{2n({\nu _0} + q\varLambda - {\nu _i})}}{{\nu _{FSR}'}}\frac{{1 - \cos {\theta _0}}}{{1 + \cos {\theta _0}}}} \right]/\sum\limits_q {{C_q}} \end{split} $$ (10) $$ \begin{split} \sigma _{12x}^ \pm =& \sum\limits_q {\sum\limits_{n = 1}^\infty {\sum\limits_{m = 1}^\infty {{C_q}R_{e,1}^n} R_{e,2}^m \cdot } } \\ & \cos \left\{ {\frac{{2\pi [(n \pm m)({\nu _0} + q\varLambda ) - (n{\nu _1} \pm m{\nu _2})]}}{{\nu _{FSR}'}}} \right\} \cdot\\ & {\rm sinc}\left\{ {\frac{{2[(n \pm m)({\nu _0} + q\varLambda ) - (n{\nu _1} \pm m{\nu _2})]}}{{\nu _{FSR}'}}\frac{{1 - \cos {\theta _0}}}{{1 + \cos {\theta _0}}}} \right\} \cdot \\ & \exp \left\{ { - {{\left[ {\frac{{\pi (n \pm m)\Delta {\nu _x}}}{{\nu _{FSR}'}}} \right]}^2}} \right\}/\sum\limits_q {{C_q}} \\ \end{split} $$ (11) 式中:ν′FSR=2νFSR/(1+cosθ0)。当满足Λ=pν′FSR,p=1, 2, ···时,公式(10)~(11)可简化为与采用单纵模激光一致的结果[15]。
由此,三个接收通道探测器接收到的高度z处的大气后向散射光电子数为:
$$ {N_j}(z) = {N_a}(z){T_{ja}}({\nu _0}) + {N_m}(z){T_{jm}}({\nu _0},T) $$ (12) 式中:j=1, 2, 3;T为z高度处的大气温度;Nm(z)和Na(z)分别为激光雷达接收到垂直高度z~z+Δz之间的米和瑞利后向散射光电子数,Δz为垂直距离分辨率,可以根据激光雷达方程计算得到。
定义温度响应函数QT和后向散射比响应函数QR分别为:
$$ {Q_T} = \frac{{{N_2}(z)}}{{{N_3}(z)}} = \frac{{({R_\beta } - 1){T_{2a}}({\nu _0}) + {T_{2m}}({\nu _0},T)}}{{({R_\beta } - 1){T_{3a}}({\nu _0}) + {T_{3m}}({\nu _0},T)}} $$ (13) $$ \begin{split} {Q_R} =& \frac{{{N_1}(z)}}{{{N_2}(z) + {N_3}(z)}}= \\ & \frac{{({R_\beta } - 1){T_{1a}}({\nu _0}) + {T_{1m}}({\nu _0},T)}}{{({R_\beta } - 1)[{T_{2a}}({\nu _0}) + {T_{3a}}({\nu _0})] + [{T_{2m}}({\nu _0},T) + {T_{3m}}({\nu _0},T)]}} \\ \end{split} $$ (14) 式中:Rβ=(βa+βm)/βm为后向散射比。联立公式(13)~(14),采用非线性迭代法可同时反演得到温度和后向散射比。根据误差传递公式,得到温度测量误差εT和后向散射比测量误差εR分别为:
$$ {\varepsilon _T} = \frac{{\sqrt {\theta _R^2S N R_T^{ - 2} + \theta _{TR}^2S N R_R^{ - 2}} }}{{\left| {{\theta _{RT}}{\theta _{TR}} - {\theta _R}{\theta _T}} \right|}} $$ (15) $$ {\varepsilon _R} = \frac{{\sqrt {\theta _{RT}^2S N R_T^{ - 2} + \theta _T^2S N R_R^{ - 2}} }}{{\left| {{\theta _{RT}}{\theta _{TR}} - {\theta _R}{\theta _T}} \right|}} $$ (16) 式中:θTR=∂QT/QT∂Rβ和θT=∂QT/QT∂T分别为QT的后向散射比灵敏度和温度灵敏度;θR=∂QR/QR∂Rβ和θRT=∂QR/QR∂T分别为QR的后向散射比灵敏度和温度灵敏度;SNRT和SNRR分别为QT和QR的探测信噪比。
$$ \begin{split} S N {R_T} =& \left[ {\frac{{{N_2} + (C - {\mu _1}{\eta _1}){\eta _2}{N_b} + {N_d}}}{{N_2^2}} + } \right. \\ & {\left. {\frac{{{N_3} + (C - {\mu _1}{\eta _1})(C - {\mu _2}{\eta _2}){N_b} + {N_d}}}{{N_3^2}}} \right]^{ - 1/2}} \\ \end{split} $$ (17) $$ \begin{split} S N {R_R} =& \left[ {\frac{{{N_1} + {\eta _1}{N_b} + {N_d}}}{{N_1^2}} + } \right.\frac{1}{{{N_2} + {N_3}}} \\ & {\left. {\frac{{(C - {\mu _1}{\eta _1})(C - {\mu _2}{\eta _2} + {\eta _2}){N_b} + 2{N_d}}}{{{{({N_2} + {N_3})}^2}}}} \right]^{ - 1/2}} \\ \end{split} $$ (18) 式中:Nb为雷达接收到的天空背景光电子数(若采用偏振隔离技术,Nb需替换为Nb/2);Nd为对应测量时间内探测器产生的暗计数,它们可根据系统参数由理论公式计算得到。
-
根据探测原理可知,对温度的测量主要是利用大气分子瑞利散射信号,故文中选定测温激光雷达工作波长为355 nm。根据参考文献[15-16]单纵模测温的优化结果,选取FPI-i的参数νFSR=7.2 GHz,Re,i=0.707,Ri=0.725,A=0.2%,ν21=ν2−ν1=3.6 GHz,入射光发散角2θ0=1 mrad。选取发射激光单个纵模谱宽δv=90 MHz,纵模间隔Λ=7.2 GHz,假定激光介质增益曲线为高斯分布,即Cq=exp[−(qΛ)2/
ΔvL2], ΔvL为1/e高度处激光辐射谱宽,设为18 GHz。利用上述参数仿真得到双级联FPI三个接收通道的米散射信号光学透过率和不同大气温度时的瑞利散射信号光学透过率,如图3所示。图3(b)为图3(a)在中心频率附近的局部放大图,可以清楚地看到:T2m随温度有明显变化,而T3m几乎不变;T2a和T3a均很小,说明米散射信号在通道2和通道3受到明显抑制,利于温度的测量;虽然T1m随温度明显变化,但T1a很大,当回波信号中有较大比例的米散射信号时不能用于温度测量。 
图 3 在不同相对频率范围内,双级联FPI三个接收通道的米散射信号透过率和不同大气温度时的瑞利散射信号透过率。(a) −6~+6 GHz;(b) −100~+100 MHz
Figure 3. Mie-signal transmittance and Rayleigh-signal transmittance at different atmospheric temperatures of three receiving channels of two-stage FPI in the relative frequency range of (a) −6-+6 GHz; (b) −100-+100 MHz
图3是假定发射激光的纵模间隔Λ与FPI的FSR严格匹配(Λ=pν′FSR, p=1, 2, ···),且中心频率ν0被严格锁定在FPI-1频谱峰值位置(ν0−ν1=Lν′FSR, L=0,1, 2, ···)时的理想结果。然而,实际Λ与FSR可能失配,ν0没有严格被锁定,即存在匹配误差
ΔνFSR=|Λ−νFSR|和锁定误差 Δν01=min{|ν0−ν1−Lν′FSR|}。这两种误差将引起温度测量偏差,甚至导致无法测量。其中,匹配误差只有多纵模激光雷达才有,它是多纵模和单纵模激光雷达技术最大的区别。从前文理论分析可知,当不存在匹配误差时,采用多纵模激光可获得与单纵模激光一致的理论结果。 图4给出了在不同后向散射比情况下,匹配误差和锁定误差引起的温度测量偏差。由图可见,温度测量偏差主要由匹配误差造成;后向散射比越大,匹配误差和锁定误差造成的温度测量偏差越大。当Rβ=1,
ΔνFSR=Δν01=10 MHz时,温度测量偏差ΔT=0.07 K,如图4(a)所示。当Rβ=2,ΔνFSR= Δν01=5 MHz时,ΔT=0.2 K; ΔνFSR= Δν01=10 MHz时,ΔT=0.8 K,如图4(b)所示。当Rβ=5, ΔνFSR=Δν01=5 MHz时,ΔT=0.8 K;ΔνFSR=10 MHz,Δν01=0时,ΔT=2.7 K;ΔνFSR=0,Δν01=10 MHz时,ΔT=0.5 K; ΔνFSR= Δν01=10 MHz时,ΔT=3.2 K,如图4(c)所示。由此可知,为保证低空大气温度测量准确,需将匹配误差控制在5 MHz以下,锁定误差控制在10 MHz以下,特别是匹配误差越小对测量越有利。 
图 4 不同的后向散射比时,匹配误差和锁定误差引起的温度测量偏差
Figure 4. Temperature measurement deviation due to matching error and locking error for different backscatter ratios
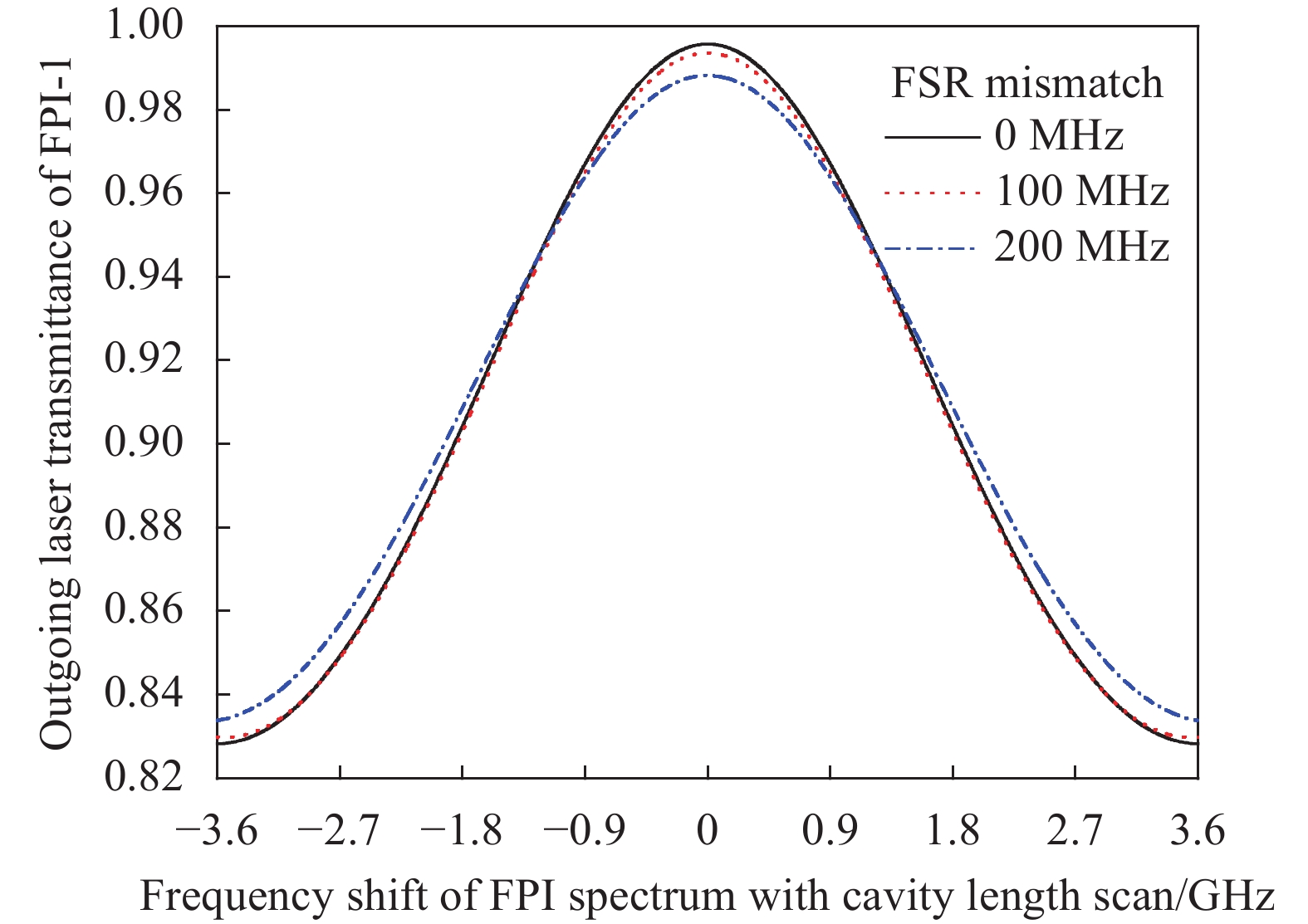
利用上述选取的FPI参数可以计算得到:当FPI腔长误差达14.5 μm时,才会使νFSR产生5 MHz的误差。实际中,FPI腔长的加工精度达微米量级是容易做到的,而激光锁频精度达到10 MHz在技术上也很容易实现。因此,要达到多纵模测温的频率匹配和锁定要求在技术上是可行的。在实际雷达系统研制中,为更好地减小匹配误差,选用腔长调节范围较大的可调谐FPI,采用腔长扫描方式实现频率匹配。具体步骤如下:(1)以步长10 μm (可视情形改变)增大或减小腔长,相应的νFSR减小或增大3.5 MHz,再采用多纵模激光在±λ范围内对腔长细扫得到FPI-1的透过率曲线,对比前后两次的透过率曲线峰值的高低,选择峰值逐渐增大的方向为腔长改变方向;(2)沿确定的方向以步长10 μm改变腔长,每走一步,通过细扫腔长获得一条FPI-1透过率曲线;(3)采用非线性拟合得到每条透过率曲线峰值,进而获得一系列腔长改变步数-透过率峰值数据对;(4)对该数据对进行非线性拟合,确定出最大峰值所对应的腔长步数,再据此将腔长调节至对应位置。图5为仿真得到的不同匹配误差时的FPI-1透过率曲线。可以看出:频率匹配误差越小,透过率峰值越大;频率完全匹配时,峰值达到最大。图6为FPI-1透过率峰值随匹配误差的变化曲线,据此可确定频率完全匹配时的FPI腔长。

图 5 不同匹配误差时,腔长扫描得到的FPI-1透过率曲线
Figure 5. FPI-1 transmittance curve obtained by cavity length scanning with different matching errors

图 6 FPI-1透过率峰值随匹配误差的变化曲线
Figure 6. Curve of FPI-1 transmittance peak changing with matching error
-
选择常见的Nd:YAG固体脉冲激光器的三倍频输出作为多纵模激光雷达发射源。Nd:YAG晶体的荧光线宽大多为4~6 cm−1,即120~180 GHz,在无种子光注入的情况下将出现多纵模同时输出。当纵模间隔取7.2 GHz时,最多可出现26个纵模。这里以美国Continuum公司Powerlite 9030产品为例,其无种子注入时的线宽为1 cm−1(30 GHz),辐射线宽内将会同时出现五个纵模。设定探测垂直距离分辨率为30 m@0~12 km和60 m@12~20 km,时间分辨率为1 min,白天天空背景光亮度取0.3 W·sr−1·m−2 ·nm−1@355 nm,激光雷达比取20。
大气参数采用1976美国标准大气模型,同时为了更合理地模拟实际大气,在标准气溶胶模型的4 km和9 km高度附近分别加入了模拟的淡积云和卷云。模拟得到的大气分子和气溶胶后向散射系数如图7(a)所示,对应的后向散射比如图7(b)所示。采用表1所示的系统参数,对基于双级联FPI的多纵模测温激光雷达系统的探测性能进行仿真。图8给出了在0~20 km高度,匹配误差和锁定误差引起的温度测量偏差。可以看出,在没有出现云层的高度上,该温度测量偏差很小,在2 km以上完全可以忽略不计;当ΔνFSR =5 MHz、Δν01=2.5 MHz时,温度测量偏差在4 km和9 km高度处达到极值,分别为0.92 K和0.71 K;当ΔνFSR=Δν01= 2.5 MHz时,温度测量偏差在4 km和9 km高度处分别为0.26 K和0.2 K。显然,在出现云层、沙尘等天气条件下,由匹配误差和锁定误差造成的对应高度的温度测量偏差将会较大。此时,减小匹配误差才会显得非常重要。图9(a)和图9(b)分别给出了由信号噪声引起的温度测量误差和后向散射比相对测量误差(εR/Rβ)随高度的变化廓线。从图9(a)可以看出:在0~20 km高度范围,白天和晚间的温度测量误差分别小于3.7 K和3.5 K。从图9(b)可以看出:在0~20 km高度范围,白天和晚间的后向散射比相对测量误差分别小于0.40%和0.38%。激光雷达系统在白天与夜晚均可保证较高的参数测量精度。

图 7 模拟的大气参数随高度的变化廓线。(a) 大气分子和气溶胶后向散射系数;(b) 后向散射比
Figure 7. Profile of simulated atmospheric parameters with altitude. (a) Backscatter coefficients of atmospheric molecules and aerosols; (b) Backscatter ratio
表 1 双级联FPI多纵模测温激光雷达系统参数
Table 1. Parameters of multi-mode temperature lidar system based on two-stage FPI
Parameter Value Parameter Value Wavelength 355 nm Filter peak transmission >60% Laser mode number 5 Laser energy/pulse 400 mJ Laser mode linewidth 90 MHz Laser mode interval 7.2 GHz Telescope/scanner aperture 25 cm Laser repetition frequency 30 Hz Optical efficiency >85% Field of view 0.1 mrad FPI free spectral range 7.2 GHz FPE-1 and FPE-2 separation 3.6 GHz FWHM of FPI-1, FPI-2 0.8 GHz Defect finesse of FPI 24 Effective reflectivity of FPI 0.707 Loss coefficient of FPI 0.2% Actual reflectivity of FPI 0.725 Detector quantum efficiency 23% Solar filter bandwidth 0.5 nm Detector dark count 100 CPS 
图 8 匹配误差和锁定误差引起的温度测量偏差随高度变化的仿真廓线
Figure 8. Simulation profile of temperature measurement deviation varying with altitude due to matching and locking errors

图 9 信号噪声引起的参数测量误差随高度变化的仿真廓线。(a) 温度;(b) 后向散射比
Figure 9. Simulation profile of parameter measurement error due to signal noise varying with altitude. (a) Temperature; (b) Backscatter ratio
-
文中提出了基于多纵模激光和双级联FPI的高光谱分辨率瑞利散射测温激光雷达技术。在分析了测量原理的基础上构建理论探测模型,导出了一系列理论公式,包括温度和后向散射比测量误差公式。研究发现:当满足频率匹配条件时,多纵模测温等效于各个单模测温的叠加,结论与单纵模测温完全一致。进一步分析了频率匹配误差和锁定误差引起的温度测量偏差。分析得出:该测量偏差主要是由频率匹配误差引起;当后向散射比为2、频率匹配误差和锁定误差均为5 MHz时,温度测量偏差为0.2 K;后向散射比越大,测量偏差也越大。为保证低层温度测量精度,匹配误差和锁定误差应分别小于5 MHz和10 MHz,针对性地给出了频率匹配校准方法和具体步骤。仿真结果表明:在0~20 km高度范围内,设计合理的系统参数后,当垂直距离分辨率为30 m@ 0~12 km和60 m@12~20 km、时间分辨率为1 min时,基于该技术的测温激光雷达由噪声引起的全天候温度测量误差和后向散射比相对测量误差分别小于3.7 K和0.40%,充分验证了该技术的可行性。
Multi-longitudinal mode temperature lidar technology based on two-stage Fabry-Perot interferometer
-
摘要: 提出了基于双级联法布里-珀罗干涉仪(FPI)的多纵模高光谱分辨率测温激光雷达技术。分析了该技术的温度探测原理,并据此构建温度探测的理论模型,导出了温度和后向散射比测量误差公式。该技术要求多纵模激光发射源的纵模间隔与双级联FPI的自由谱间距相匹配,并将各纵模的中心频率锁定在前级FPI周期性频谱的峰值位置。详细分析了频率匹配误差和锁定误差引起的温度测量偏差,结果表明:后向散射比越大,相同的频率匹配误差和锁定误差引起的温度测量偏差就越大;频率匹配误差对温度测量的影响大,为保证低层大气温度测量准确,频率匹配误差和锁定误差应分别小于5 MHz和10 MHz。进一步给出了采用FPI腔长粗扫和细扫相结合的频率匹配校准方法和步骤。设定合理的系统参数,对基于双级联FPI的多纵模测温激光雷达系统的探测性能进行仿真分析。结果表明:在0~20 km高度范围内,通常匹配误差和锁定误差引起的温度测量偏差很小,在2 km以上可忽略不计;若出现云层、沙尘等,对应高度的温度测量偏差将会较大;垂直距离分辨率取30 m@0~12 km和60 m@12~20 km、时间分辨率取1 min时,白天和晚间由噪声引起的温度测量误差分别小于3.7 K和3.5 K,后向散射比相对测量误差分别小于0.40%和0.38%。Abstract:
Objective The high spectral resolution lidar (HSRL) based on Rayleigh scattering spectroscopy is currently one of the most effective equipment for remote sensing of atmospheric temperature below 20 km. Traditional HSRL for temperature measurement requires a single longitudinal mode laser source, which leads to the defects of high system cost, poor environmental adaptability and low laser energy utilization. Therefore, it is of great scientific significance and practical application value to study atmospheric temperature detection technology with high detection accuracy, high spatial and temporal resolution, strong environmental adaptability and low cost. For this purpose, the HSRL with multi-longitudinal mode (MLM) laser, i.e. MLM-HSRL technology based on two-stage Fabry-Perot interferometer (FPI) for temperature measurement is proposed and studied. Methods The temperature detection principle of MLM-HSRL based on two-stage FPI is analyzed (Fig.1). The theoretical model of temperature detection is constructed accordingly, and the measurement error formulas of temperature and backscatter ratio are derived. The frequency matching and locking conditions are studied, and the temperature measurement deviation caused by frequency matching error and locking error is analyzed. The frequency matching calibration method and steps based on the combination of FPI cavity length coarse scanning and fine scanning are presented (Fig.5-6). The MLM-HSRL system parameters (Tab.1) are designed, and its detection performance is simulated using the 1976 USA atmospheric model and simulated cumulus and cirrus clouds. Results and Discussions The frequency matching condition is that the longitudinal mode interval of the MLM laser is an integer multiple of the free spectral spacing of the two-stage FPI. When this condition is satisfied, the MLM temperature measurement is equivalent to the superposition of each single longitudinal mode (SLM) temperature measurement. The analysis results show that the larger the backscatter ratio is, the greater the temperature measurement deviation caused by the same frequency matching error and locking error is; the frequency matching error has a great impact on temperature measurement; the frequency matching error and locking error should be less than 5 MHz and 10 MHz, respectively (Fig.4). The simulation results of MLM-HSRL detection performance show that in the altitude of 0-20 km, the temperature measurement deviation caused by the frequency matching error and locking error is usually very small, and it can be neglected above 2 km; If there are clouds, dust, etc., this deviation will be larger at the corresponding altitude (Fig.8); When the vertical resolution is 30 m at 0-12 km and 60 m at 12-20 km, and the time resolution is 1 min, the temperature measurement errors caused by noise during the day and night are below 3.7 K and 3.5 K, respectively, and the backscatter ratio relative measurement errors are below 0.40% and 0.38%, respectively (Fig.9). Conclusions A MLM-HSRL technology for temperature measurement based on two-stage Fabry-Perot interferometer (FPI) is proposed and studied. This technology requires that the longitudinal mode spacing of the laser source is matched with the free spectral spacing of the two-stage FPI, and the center frequency of each longitudinal mode is locked at the peak of the periodic spectrum of the first stage FPI. When the frequency matching condition is satisfied, the MLM temperature measurement is equivalent to the superposition of each SLM temperature measurement. The frequency matching error and locking error will cause additional temperature measurement error, and they should be less than 5 MHz and 10 MHz, respectively, in order to ensure the accuracy of the low-altitude atmospheric temperature measurement, which can be achieved through frequency matching calibration. The simulation results show that the MLM-HSRL system based on this technology is capable of measuring temperature and backscatter ratio at the altitudes up to 20 km with high accuracy in all weather. These conclusions fully demonstrate the feasibility of this technology. -
图 1 基于双级联FPI和多纵模激光的大气温度探测原理。(a) FPI-1分离米散射信号;(b) FPI-2透反射信号测温
Figure 1. Atmospheric temperature detection principle based on two-stage FPI and multi-mode laser. (a) Separation of Mie signals by FPI-1; (b) Temperature measurement using FPI-2 transmission and reflection signals
图 2 基于双级联FPI和多纵模激光的测温激光雷达接收系统光路
Figure 2. Optical path of temperature lidar receiving system based on two-stage FPI and multi-mode laser
图 3 在不同相对频率范围内,双级联FPI三个接收通道的米散射信号透过率和不同大气温度时的瑞利散射信号透过率。(a) −6~+6 GHz;(b) −100~+100 MHz
Figure 3. Mie-signal transmittance and Rayleigh-signal transmittance at different atmospheric temperatures of three receiving channels of two-stage FPI in the relative frequency range of (a) −6-+6 GHz; (b) −100-+100 MHz
图 4 不同的后向散射比时,匹配误差和锁定误差引起的温度测量偏差
Figure 4. Temperature measurement deviation due to matching error and locking error for different backscatter ratios
图 5 不同匹配误差时,腔长扫描得到的FPI-1透过率曲线
Figure 5. FPI-1 transmittance curve obtained by cavity length scanning with different matching errors
图 6 FPI-1透过率峰值随匹配误差的变化曲线
Figure 6. Curve of FPI-1 transmittance peak changing with matching error
图 7 模拟的大气参数随高度的变化廓线。(a) 大气分子和气溶胶后向散射系数;(b) 后向散射比
Figure 7. Profile of simulated atmospheric parameters with altitude. (a) Backscatter coefficients of atmospheric molecules and aerosols; (b) Backscatter ratio
图 8 匹配误差和锁定误差引起的温度测量偏差随高度变化的仿真廓线
Figure 8. Simulation profile of temperature measurement deviation varying with altitude due to matching and locking errors
图 9 信号噪声引起的参数测量误差随高度变化的仿真廓线。(a) 温度;(b) 后向散射比
Figure 9. Simulation profile of parameter measurement error due to signal noise varying with altitude. (a) Temperature; (b) Backscatter ratio
表 1 双级联FPI多纵模测温激光雷达系统参数
Table 1. Parameters of multi-mode temperature lidar system based on two-stage FPI
Parameter Value Parameter Value Wavelength 355 nm Filter peak transmission >60% Laser mode number 5 Laser energy/pulse 400 mJ Laser mode linewidth 90 MHz Laser mode interval 7.2 GHz Telescope/scanner aperture 25 cm Laser repetition frequency 30 Hz Optical efficiency >85% Field of view 0.1 mrad FPI free spectral range 7.2 GHz FPE-1 and FPE-2 separation 3.6 GHz FWHM of FPI-1, FPI-2 0.8 GHz Defect finesse of FPI 24 Effective reflectivity of FPI 0.707 Loss coefficient of FPI 0.2% Actual reflectivity of FPI 0.725 Detector quantum efficiency 23% Solar filter bandwidth 0.5 nm Detector dark count 100 CPS  下载: 导出CSV
下载: 导出CSV
-
[1] Li Yajuan, Song Shalei, Li Faquan, et al. High-precision measurements of lower atmospheric temperature based on pure rotational Raman lidar [J]. Chinese Journal of Geophysics, 2015, 58(7): 2294-2305. (in Chinese) doi: 10.6038/cjg20150708 [2] Di Huige, Hua Dengxin. Research status and progress of lidar for atmosphere in China (Invited) [J]. Infrared and Laser Engineering, 2021, 50(3): 20210032. (in Chinese) doi: 10.3788/IRLA20210032 [3] Yan Zhaoai, Hu Xiong, Guo Wenjie, et al. Near space Doppler lidar techniques and applications (Invited) [J]. Infrared and Laser Engineering, 2021, 50(3): 20210100. (in Chinese) doi: 10.3788/IRLA20210100 [4] Bösenberg J. Ground-based differential absorption lidar for water-vaper and temperature profiling: Methodology [J]. Appl Opt, 1998, 37(18): 3845-3860. doi: 10.1364/AO.37.003845 [5] Hua D X, Kobayashi T. Ultraviolet Rayleigh-Mie lidar by use of a multicavity Fabry-Perot filter for accurate temperature profiling of the troposphere [J]. Appl Opt, 2005, 44(30): 6474-6478. doi: 10.1364/AO.44.006474 [6] Liu Z S, Bi D C, Song X Q, et al. Iodine-filter-based high spectral resolution lidar for atmospheric temperature measurements [J]. Opt Lett, 2009, 34(18): 2712-2714. doi: 10.1364/OL.34.002712 [7] Xu Bingqing, Han Yan, Xu Wenjing, et al. Design and simulation of Raman lidar with small field of view for atmospheric temperature and humidity detection [J]. Infrared and Laser Engineering, 2021, 50(9): 20200410. (in Chinese) doi: 10.3788/IRLA20200410 [8] Wang Qing, Gao Chunqing. Research progress on eye-safe all-solid-state single-frequency lasers [J]. Chinese Journal of Lasers, 2021, 48(5): 0501004. (in Chinese) doi: 10.3788/CJL202148.0501004 [9] Gao Jian, Zhou Anran, Sun Dongsong, et al. An identification method of seed laser injection in Doppler lidar [J]. Infrared and Laser Engineering, 2018, 47(2): 0230001. (in Chinese) doi: 10.3788/IRLA201847.0230001 [10] Cheng Zhongtao, Liu Dong, Liu Chong, et al. Multi-longitudinal-mode high-spectral-resolution lidar [J]. Acta Optica Sinica, 2017, 37(4): 0401001. (in Chinese) doi: 10.3788/AOS201737.0401001 [11] Gao Fei, Nan Hengshuai, Huang Bo, et al. Technical realization and system simulation of ultraviolet multi-mode high-spectral-resolution lidar for measuring atmospheric aerosols [J]. Acta Physica Sinica, 2018, 67(3): 030701. (in Chinese) doi: 10.7498/aps.67.20172036 [12] Jin Y, Sugimoto N, Ristori P, et al. Measurement method of high spectral resolution lidar with a multimode laser and a scanning Mach-Zehnder interferometer [J]. Appl Opt, 2017, 56(21): 5990-5995. doi: 10.1364/AO.56.005990 [13] Bruneau D, Blouzon F, Spatazza J, et al. Direct-detection wind lidar operating with a multimode laser [J]. Appl Opt, 2013, 52(20): 4941-4949. doi: 10.1364/AO.52.004941 [14] Shen Fahua, Yu Aiai, Dong Jihui, et al. Dual-frequency quad-edge frequency discrimination photoelectric detection technique based on single fabry-perot etalon [J]. Acta Optica Sinica, 2014, 34(3): 0312005. (in Chinese) doi: 10.3788/AOS201434.0312005 [15] Shen F, Zhuang P, Shi W, et al. Fabry-Perot etalon based ultraviolet high-spectral-resolution lidar for tropospheric temperature and aerosol measurement [J]. Appl Phys B, 2018, 124(7): 138. doi: 10.1007/s00340-018-7003-0 [16] Shen F, Xie C, Qiu C, et al. Fabry-Perot etalon based ultraviolet tri-frequency high-spectral-resolution lidar for wind, temperature and aerosol measurements from 0.2 to 35 km altitude [J]. Appl Opt, 2018, 57(31): 9328-9340. doi: 10.1364/AO.57.009328 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 154
- HTML全文浏览量: 59
- PDF下载量: 23
- 被引次数: 0



















