



 下载:
下载:






-
随着现代制造和检测技术的快速发展,三维坐标定位技术已成为高精度测量、设计和加工的强有力工具。三维坐标定位技术在众多领域均发挥着重要作用,包括空间定位、尺寸测量以及逆向工程等[1-3]。目前的三维坐标定位技术主要分为接触式和非接触式。作为一种通用性较强的高精度接触式测量工具,三坐标测量机是目前三维坐标定位技术的主要代表仪器之一[4]。但由于其需要高精度带光栅尺的气浮导轨以及高平面度的大理石平台,使得三维坐标测量机体积巨大,且造价昂贵。作为非接触式测量仪器的激光跟踪仪[5]在三维坐标定位过程中不需要导轨的支持,但是它对激光准直的要求极高且成本昂贵。此外,反射目标的形状误差和材料不均匀性会引入额外的测量不确定度。为降低成本,提高测量效率并实现高精度的三维坐标定位,一种新型的点衍射干涉测量系统被学者提出[6]。区别于传统的干涉仪,点衍射干涉测量系统采用极高精度的衍射波作为理想的参考标准[7-9],且不需要昂贵的精密器件,其测量探头可以在空间中自由移动且不需要导轨,同时也避免了在多次测量中由于目标不完善而带来的测量不确定度。而如何利用点衍射干涉场中解调出的相位重构出探头坐标是点衍射干涉测量系统的一个关键性问题[10]。因此,用于重构的数值迭代算法在很大程度上决定了系统可实现的精度及鲁棒性。传统的数值迭代算法包括牛顿迭代算法和进化算法均不适合计算超定方程,可能会导致检测平面信息的大量浪费,并且计算时间过长,不适合实时测量[11-13]。随着一种快速搜索粒子群算法的提出[14],数据大量浪费的问题得到了解决,并且计算时间也显著缩短,但是该算法容易陷入局部最优。随着机器学习的发展,深度学习技术已被证明可以在光学测量领域得到很好的应用,比如相位展开、波前重构等[15-17]。
为了提高现有的三维坐标定位技术的精度和稳定性,减少陷入局部最优的情况,提出了一种基于深度学习的点衍射干涉三维坐标定位方法(Deep-learning-based point-diffraction interferometer, DL-PDI)来进行三维坐标定位。
文中通过设计一个训练有素的神经网络来描述干涉场相位分布与点衍射源坐标之间的非线性关系,将相位分布信息作为输入,点衍射源坐标作为输出,训练神经网络。首先,使用训练好的神经网络进行相位分布信息到点衍射源坐标的转换;其次,将输出的点衍射源坐标作为初始粒子;最后,通过粒子群算法进一步提高精度,重构出高精度三维坐标。此外,所提出的神经网络结构采用了卷积模块化设计,大大提高了神经网络的稳定性。为验证所提方法的可行性与可靠性,文中进行了仿真与实验分析,并与传统的粒子群算法的测量结果进行对比分析。结果证明:文中所提方法可以有效提高三维坐标定位的精度以及稳定性。
-
图1为基于点衍射干涉的三维坐标定位系统示意图。从稳频激光器发出的激光经过偏振片(P)和半波片(HWP1)后转换为线偏振光[9],然后由偏振分光棱镜(PBS)分成两部分线偏振光,即p光和s光。p光经过第二块半波片(HWP2),并由耦合器耦合进单模光纤(SF2)中。s光两次经过四分之一波片(QWP)后,再次通过PBS,并经由耦合器耦合进另一根单模光纤(SF1)中。两根光纤(SF1和SF2)的出射端集成到测量探头上,并产生点衍射球面波(W1与W2),进而叠加形成点衍射干涉场。将相机放置于干涉场中获取干涉条纹图,通过移相、解包裹等算法进行相位信息提取,利用基于深度学习的点衍射干涉三维坐标定位方法得到最优的被测对象的空间三维坐标值。

图 1 点衍射干涉三维坐标定位系统布局
Figure 1. System layout of point-diffraction interferometer for three-dimensional coordinate positioning
-
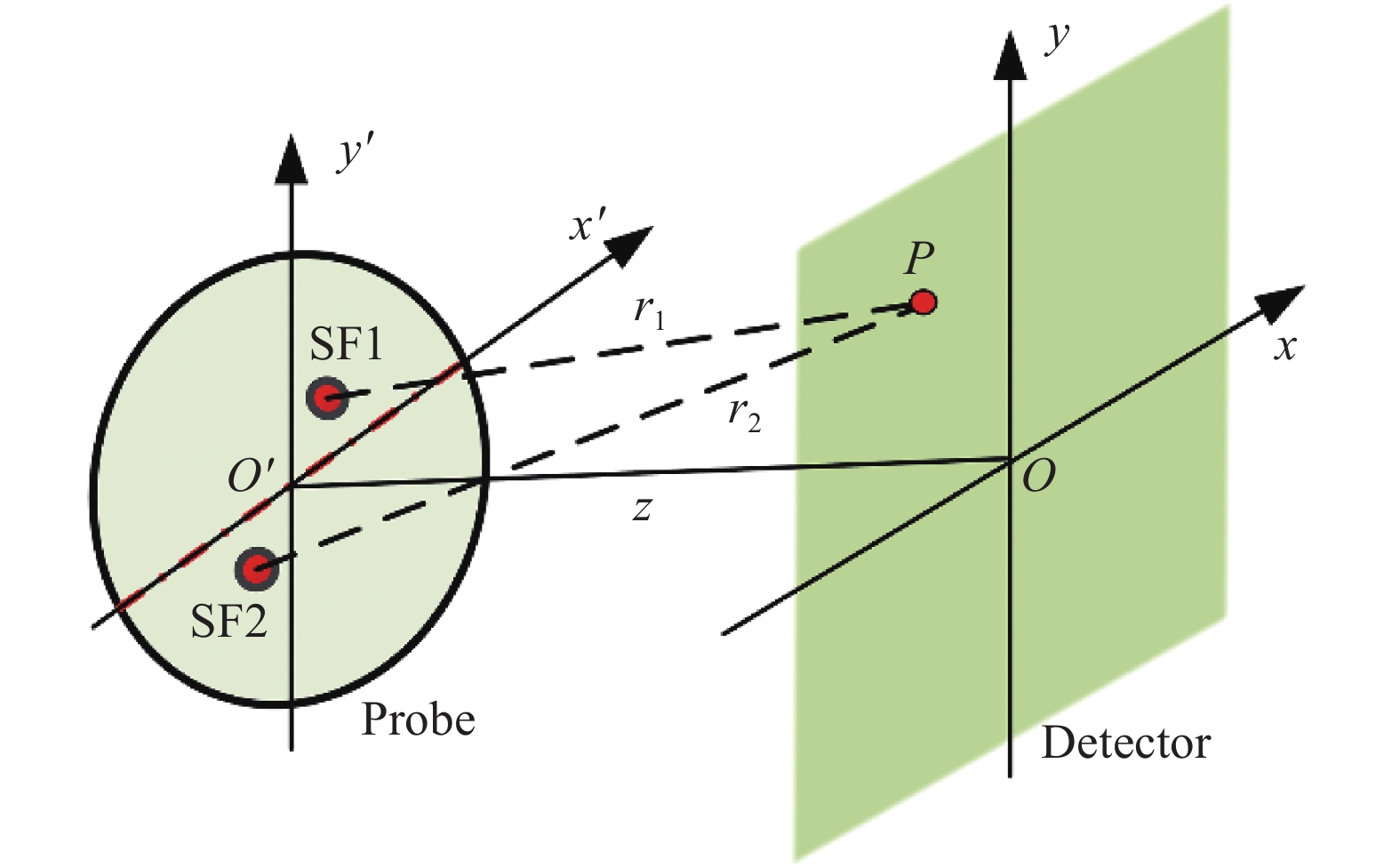
根据点衍射干涉场的相位分布与点衍射源的光程差之间的一一对应关系,可以建立两个点衍射源与相机探测平面之间的数学模型,如图2所示。

图 2 三维坐标定位的数学模型
Figure 2. Mathematical model for three-dimensional coordinate positioning
图2中,相机探测平面原点为O,两个点衍射源(SF1和SF2)和相机探测平面上的任意一点像素点P之间的光程分别为
${r_1}$ 、${r_2}$ ,SF1和SF2的间距为d,即两根光纤的出射端距离为d,中点为O',则可得像素点P处的相位差信息为:$$ \varphi (x,y,z) = \dfrac{{2\pi }}{\lambda }({r_1} - {r_2}) $$ (1) 由像素点P处的相位差信息与两个点衍射源三维坐标值之间的关系,可得出非线性方程。根据非线性方程建立超定方程组并转化如下:
$$ \psi \left( \varOmega \right) = \dfrac{1}{2}f{\left( \varOmega \right)^{\rm{T}}}f\left( \varOmega \right) $$ (2) 式中:有关相位差信息的非线性方程为
$f(\varOmega ) = \left[ {\varphi (x,y,z) - {\varphi _0}} \right] - \left[ {{\varphi _{{\rm{CCD}}}}(x,y,z) - \zeta } \right]$ ,向量$ \varOmega \text{=} ({x}_{1},{y}_{1},{z}_{1},{x}_{2}, {y}_{2},{z}_{2}) $ 表示点O'与O位置之间的相互关系,$ {\varphi _0} $ 为通过计算得到点O的相位差值,$ {\varphi _{{\text{CCD}}}}(x,y,z) $ 和$\zeta $ 分别为测量得到的点P、O的相位差信息[18]。对于两个点衍射源SF1和SF2的三维坐标值,可通过求解方程
$\psi (\varOmega )$ 的全局最优解${\varOmega ^ * }$ 获得。利用基于深度学习的点衍射干涉三维坐标定位方法可对目标方程进行求解,从而可以实现最终的高精度三维坐标定位。为了实现三维坐标的高精度和良好鲁棒性的定位,文中所提方法主要包含两个步骤来获取全局最优解
${\varOmega ^ * }$ 。在第一步中,文中采用深度学习算法获取初始点衍射源坐标。通过光线追迹点衍射干涉系统模型,获得大量数据集,包括不同位置的点衍射源坐标${\varOmega _{true}}$ 和相应的相位差信息${\varPhi _{train}}$ 。相位差信息${\varPhi _{train}}$ 被投入进搭建好的神经网络模型中,经过前向传播之后,输出两个点衍射源坐标${\varOmega _{predict}}$ 。文中通过损失函数$ {L_{RMSE}} $ 来评估神经网络的训练结果:$$ \begin{split} {L_{RMSE}} =& {\text{RMSE}}\left( {{\varOmega _{predict}} - {\varOmega _{true}}} \right) =\\ & \sqrt {\frac{1}{m}\sum\limits_{i = 1}^m {{{\left( {{{\omega '}_i} - {\omega _i}} \right)}^2}} } \\ \end{split} $$ (3) 式中:RMSE表示均方根误差;m为神经网络的输出数据个数;
$ {\omega '_i} $ 和$ {\omega _i} $ 分别表示模型的输出结果和对应的真值。在反向传播中,神经网络的神经元会根据损失函数的结果进行更新优化。$ {L_{RMSE}} $ 逐步迭代减小直至收敛,神经网络的输出值逐步逼近真值。将实测的相位差信息${\varPhi _{test}}$ 投入训练好的神经网络模型中,获得输出的点衍射源坐标$\varOmega '$ 。在第二步中,将第一步所得的初始坐标$\varOmega '$ 设为初始粒子,采用粒子群算法进行迭代优化,进一步提高坐标重构精度。最终通过以上两个步骤,可以获得高精度的三维坐标值${\varOmega ^ * }$ 。 -
图3为用于三维坐标定位的神经网络模型内部结构。它是基于多层卷积神经网络(CNN)的结构,主要包括一个输入层,五个卷积模块以及一个输出层。神经网络模型的输入为64×64的矩阵。前四个卷积模块主要包含卷积层、池化层、批标准化(BN)、leaky rectified linear unit (Leaky ReLU)激活函数以及dropout层。卷积层的卷积核大小为5×5,步长设为1。池化层采用的是maxpooling,用来改善神经网络的泛化能力,减少计算量,并且保留相位分布信息。BN则可以避免梯度爆炸和梯度消失,加速训练和收敛。Leaky ReLU激活函数使得输入值为负时神经网络依旧可以发挥作用,避免神经元死亡。dropout层可以设置数据保留率,在此网络中设为0.5,从而减少过拟合。最后一个卷积模块包含5×5和2×2两种卷积核的卷积层,它使得输出数据变为3×2的矩阵。最后由全连接层作为输出层输出点衍射源坐标(6×1的矩阵),并通过损失函数来评估结果,通过不断迭代更新,获取最佳的神经网络模型。

图 3 三维坐标定位神经网络模型结构图
Figure 3. Structure diagram of three-dimensional coordinate positioning neural network model
为了训练神经网络模型,文中根据光线追迹点衍射干涉模型,分别设定x、y、z的最大值与最小值为100 mm和0 mm,两点衍射源的距离d为125 μm。在d的约束下,点衍射源坐标在上述x、y、z的最值范围内随机生成,并通过三维坐标生成相对应的相位差。文中一共生成了25000组样本数据集,将相位差作为输入,点衍射源坐标作为输出。其中,23000组数据集作为训练数据集,2000组数据集作为验证数据集。由于模型的训练及数据处理涉及大量的矩阵运算及浮点数并行运算等操作,因此需要较高的硬件配置用来支撑大量繁杂的计算,并且保持高效状态。文中主要使用了Intel Core i9-9900 K的CPU,并搭配了NVIDIA GeForce RTX 2080 Ti显卡,同时采用批处理以改善训练效率和避免超出内存的情况,以及采用adaptive moment estimation (Adam)优化器去进行迭代优化,并将学习率设为10−4。为了加快计算速度,避免过量计算,文中将相位矩阵从原来的尺寸2 448(H)×2 048(V)下采样到64(H)×64(V)。
图4所示为文中所提神经网络的训练和验证效果图。由图可知,在训练和验证过程中,损失函数值在前期下降速度较快,并在epoch=1500附近达到收敛,由此可得神经网络模型的训练速度较快,且验证结果和训练结果差异不大,证明此次的神经网络模型的性能符合要求,可以留存用来进行后续的三维坐标定位。

图 4 训练和验证过程中损失函数的变化
Figure 4. Change of loss function in training and validation process
-
为了验证文中所提方法的精度和鲁棒性,文中进行了数值仿真。仿真中设置相机的像素平面大小为2448 (H)×2048 (V),像元尺寸为3.45 μm(H)×3.45 μm(V),并且为了便于分析,将两个点衍射源的中点作为测量目标。在数值仿真中,测量探头的初始位置为(0 mm, 0 mm, 100 mm),将探头沿着x、y、z方向各自移动50 mm,中间每隔5 mm测量一次,由于实际检测环境必然存在各种各样噪声的干扰,因此文中在仿真中加入均方根值为5 nm的高斯噪声来模拟实际检测环境。利用训练有素的神经网络对相位分布进行初步处理,输出初始探头坐标
$\varOmega '$ ,并在此基础上对粒子群算法的初始粒子进行修改,进而重构出高精度三维坐标。如图5(a)~(c)所示为仿真中x、y、z方向探头位移的坐标测量误差。
图 5 仿真中坐标测量误差。(a)~(c) 为x、y、z轴位移的测量误差
Figure 5. Coordinate measurement error in simulation. Measurement error for the displacements in x, y, z axes (a)-(c)
由图5(a)~(c)可以得出,基于点衍射干涉的深度学习三维坐标定位系统的三维坐标测量误差均较小,达到了纳米量级,并且每一次的测量时间在0.05 s左右,测量速度较快,稳定性较强,为实现三维坐标的高精度定位测量提供了一种可行的方案。
-
为了进一步验证所提方法对三维坐标定位的可行性,文中搭建了一个基于图1所示配置的测量实验系统。为了减少环境干扰,测量系统放置在隔振平台上,用隔热箱进行屏蔽。实验中所使用的相机像素平面大小为2448 (H)×2048 (V),像元尺寸为3.45 μm (H)×3.45 μm (V)。集成在测量探头中的两个点衍射源之间的距离约为125.00 μm。
在实验中,采用了海克斯康的三坐标测量机(HEXAGON Global CMM, 定位精度为1.7 μm)对测量探头进行测量,测量探头的初始位置为(10 mm, 10 mm, 10 mm),将探头沿着z方向移动至终点(10 mm, 10 mm, 100 mm),中间每隔10 mm测量一次。每次测量均采用文中所提方法和先前提出的传统的基于粒子群算法的方法[10]进行互相对比验证。图6为实验中使用不同方法得出的三维坐标位移测量误差。

图 6 实验中的坐标测量误差
Figure 6. Coordinate measurement error in experiment
由图6可知,文中所提方法的测量精度在亚微米量级,由于文中所提方法相对于传统的基于粒子群算法的方法,对环境干扰的敏感性更低,且对坐标重构的鲁棒性更强,最终获取的测量精度也更佳。为了比较两种方法的测量效率,在随机选取的位置(19.61 mm,4.48 mm,21.48 mm)进行了迭代性能的比较,如图7所示。由图可知,相较于传统的基于粒子群算法的方法,文中所提方法明显具有更快的收敛速度以及更高的重构精度。

图 7 实验中不同重构方法下相位误差的变化
Figure 7. Change of phase error with different reconstruction methods in experiment

图 8 实验的重复性测量结果
Figure 8. Repeatability measurement results in experiment
为了验证文中所提方法的稳定性,文中进行了重复性实验,在位置(19.61 mm,4.48 mm,21.48 mm)重复测量10次,测量时间间隔为5 min。图8为此次重复性实验中不同方法的测量误差。由图8可知,基于深度学习的点衍射干涉三维坐标定位方法的均值和RMS值分别为0.05 μm和0.05 μm,而传统的基于粒子群算法的方法的均值和RMS值分别为0.81 μm和0.95 μm。因此可得文中所提方法具有更好的稳定性和可靠性。因此文中提供了一种高精度的,鲁棒性强的三维坐标定位方法。
-
针对传统的三维坐标定位技术容易受到外界干扰,容易陷入局部最优,测量速度较慢并且实时测量较为困难的问题,文中提出了一种基于深度学习的点衍射干涉三维坐标定位方法。利用所提出的CNN神经网络建立点衍射干涉场的相位分布与点衍射源坐标之间的非线性关系,并在获取到点衍射源坐标的初始值的基础上对粒子群算法的初始粒子进行进一步修正,进而实现高精度地重构三维坐标。数值仿真结果和实验结果均验证了该方法的可行性和可靠性,实验精度达到了亚微米量级。通过对比和重复性实验,证明了该方法在测量精度和鲁棒性方面的理想性能,所测结果的均值和RMS值分别为0.05 μm和0.05 μm。结果表明,文中所提出的方法明显优于传统的基于粒子群算法的方法,为实现高精度、稳定的三维坐标定位提供了一种可行的方法。
Deep-learning-based point-diffraction interferometer for 3D coordinate positioning
-
摘要: 为了提高现有的三维坐标定位技术的测量精度、稳定性和测量效率,提出了基于深度学习的点衍射干涉三维坐标定位方法。该方法设计了一个深度神经网络用于点衍射干涉场的坐标重构,将相位差矩阵作为输入,构建训练数据集,将点衍射源坐标作为输出,训练神经网络模型。利用训练有素的神经网络对测量到的相位分布进行初步处理,将相位信息转换为点衍射源坐标,根据得到的点衍射源坐标进一步修改粒子群算法的初始粒子,进而重构出高精度的三维坐标值。该神经网络为建立干涉场相位分布与点衍射源坐标之间的非线性关系提供了一种可行的方法,显著提高了三维坐标定位的精度、稳定性和测量效率。为验证所提方法的可行性,进行了数值仿真和实验验证,采用不同的方法进行反复对比与分析。结果表明:所提方法的单次测量时间均在0.05 s左右,其实验精度能够达到亚微米量级,重复性实验的均值和RMS值分别为0.05 μm和0.05 μm,充分证明了该方法的可行性,并证明了其良好的测量精度和可重复性,为三维坐标定位提供了一种有效可行的方法。Abstract: In order to improve the measurement accuracy, stability and efficiency of the existing 3D coordinate positioning technology, a deep-learning-based point-diffraction interferometer for 3D coordinate measurement method was proposed. A deep neural network was designed for coordinate reconstruction of the point-diffraction interference field. The phase difference matrix was used as the input to construct the training dataset, and the coordinates of point-diffraction sources were used as the output to train the neural network model. The well-trained neural network was used to process the measured phase distribution initially and the phase information was converted to the coordinates of point-diffraction sources. According to the obtained coordinates of point-diffraction sources, the initial particles of the particle swarm optimization algorithm were further modified, and then the high-precision three-dimensional coordinate was reconstructed. This neural network provides a feasible method to establish the nonlinear relationship between the phase distribution of the interference field and the coordinates of the point-diffraction sources, and significantly improves the accuracy, stability and measurement efficiency of the 3D coordinate positioning. In order to verify the feasibility of the proposed method, numerical simulation and experimental verification were carried out, and different methods were used for repeated comparison and analysis. The results show that the single measurement time of the proposed method is about 0.05 s, and the experimental accuracy can reach the submicron magnitude. The mean and RMS values of the repeatability experiments are 0.05 μm and 0.05 μm, respectively, which proves the feasibility of the proposed method and its good measurement accuracy and stability. It provides an effective and feasible method for 3D coordinate positioning.
-
图 1 点衍射干涉三维坐标定位系统布局
Figure 1. System layout of point-diffraction interferometer for three-dimensional coordinate positioning
图 2 三维坐标定位的数学模型
Figure 2. Mathematical model for three-dimensional coordinate positioning
图 3 三维坐标定位神经网络模型结构图
Figure 3. Structure diagram of three-dimensional coordinate positioning neural network model
图 4 训练和验证过程中损失函数的变化
Figure 4. Change of loss function in training and validation process
图 5 仿真中坐标测量误差。(a)~(c) 为x、y、z轴位移的测量误差
Figure 5. Coordinate measurement error in simulation. Measurement error for the displacements in x, y, z axes (a)-(c)
图 7 实验中不同重构方法下相位误差的变化
Figure 7. Change of phase error with different reconstruction methods in experiment
-
[1] Yang Wenchen, Qin Zengguang, Liu Zhaojun, et al. A Hilbert-Huang transform method for vibration localization based on a dual Mach-Zehnder distributed optical fiber sensor [J]. Chinese Optics, 2021, 14(6): 1410-1416. (in Chinese) doi: 10.37188/CO.2021-0065 [2] Wu Junjie, Li Yuan. Three-dimensional coordinate measurement of microstructures based on nano measuring machine [J]. Optics and Precision Engineering, 2020, 28(10): 2252-2259. (in Chinese) doi: 10.37188/OPE.20202810.2252 [3] Sun Senzhen, Li Guangyun, Feng Qiqiang, et al. Indoor positioning based on visible light communication and binocular vision [J]. Optics and Precision Engineering, 2020, 28(4): 834-843. (in Chinese) [4] Miks A, Novak J. Noncontact interferometric optical probe for calibration of coordinate measuring machines [J]. Appl Opt, 2011, 50(5): 671-678. doi: 10.1364/AO.50.000671 [5] He Jun, Zhang Fumin, Zhang Huadi, et al. Multilateral laser tracking system self-calibration method based on spherical center fitting [J]. Infrared and Laser Engineering, 2020, 49(8): 20190438. (in Chinese) doi: 10.3788/IRLA20190438 [6] Wang Daodang, Chen Xixi, Xu Yangbo, et al. High-NA fiber point-diffraction interferometer for three-dimensional coordinate measurement [J]. Opt Express, 2014, 22(21): 25550-25559. doi: 10.1364/OE.22.025550 [7] Li Yao, Yang Yongying, Wang Chen, et al. Point diffraction in terference detection technology [J]. Chinese Optics, 2017, 10(4): 391-414. (in Chinese) doi: 10.3788/co.20171004.0391 [8] Zhu Qixing, Wang Daodang, Lu Yiwei, et al. Optimization and error correction of dual-path fiber point-diffraction interference projection system [J]. Infrared and Laser Engineering, 2022, 51(3): 20210140. (in Chinese) doi: 10.3788/IRLA20210140 [9] Wang Daodang, Xie Zhongmin, Wang Chao, et al. Probe misalignment calibration in fiber point-diffraction interferometer [J]. Opt Express, 2019, 27(23): 34312-34322. doi: 10.1364/OE.27.034312 [10] Wang Zhichao, Wang Daodang, Gong Zhidong, et al. Measurement of absolute displacement based on dual-path submicron-aperture fiber point-diffraction interferometer [J]. Optik, 2017, 140: 802-811. doi: 10.1016/j.ijleo.2017.05.020 [11] Wang Daodang, Wang Fumin, Chen Xixi, et al. Three-dimensional coordinate measurement with point-diffraction interferometer based on levenbery-marquardt algorithm [J]. Acta Optica Sinica, 2014, 34(8): 0812001. (in Chinese) doi: 10.3788/AOS201434.0812001 [12] Zhang P G, Yang C L, Xu Z H, et al. Hybrid particle swarm global optimization algorithm for phase diversity phase retrieval [J]. Opt Express, 2016, 24(22): 25704-25717. doi: 10.1364/OE.24.025704 [13] Kandel S, Maddali S, Nashed Y S G, et al. Efficient ptychographic phase retrieval via a matrix-free Levenberg-Marquardt algorithm [J]. Opt Express, 2021, 29(15): 23019-23055. doi: 10.1364/OE.422768 [14] Wang Daodang, Xu Yangbo, Chen Xixi, et al. Absolute displacement measurement with point-diffraction interferometer based on quick searching particle swarm optimization algorithm [J]. Acta Optica Sinica, 2016, 36(1): 0112001. (in Chinese) [15] Zhao Zhuo, Li Bing, Kang Xiaoqin, et al. Phase unwrapping method for point diffraction interferometer based on residual auto encoder neural network [J]. Opt Laser Eng, 2021, 138: 106405. doi: 10.1016/j.optlaseng.2020.106405 [16] Dou Jinchao, Wang Daodang, Yu Qiuye, et al. Deep-learning-based deflectometry for freeform surface measurement [J]. Opt Lett, 2022, 47(1): 78-81. doi: 10.1364/OL.447006 [17] Chai Changchun, Chen Cheng, Liu Xiaojun, et al. Deep learning based one-shot optically-sectioned structured illumination microscopy for surface measurement [J]. Opt Express, 2021, 29(3): 4010-4021. doi: 10.1364/OE.415210 [18] Wang Chao, Wang Daodang, Zhu Qixing, et al. Transient point-diffraction interferometric system for three-dimensional measurement [J]. Chinese Journal of Scientific Instrument, 2020, 41(2): 93-100. (in Chinese) doi: 10.19650/j.cnki.cjsi.J1905817 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 203
- HTML全文浏览量: 66
- PDF下载量: 60
- 被引次数: 0



























