



 下载:
下载:


-
星基红外遥感探测能够获取全球气象观测资料,是数值天气预报、环境气候监测等研究的重要手段之一,数据的辐射定标精度将对其定量化应用能力产生影响[1-2]。卫星长期业务运行期间,仪器探测器性能会随着时间及外部环境变化产生衰减,导致数据辐射定标精度降低,因此有必要进行星上辐射定标以提升数据质量[3]。红外高光谱大气探测仪因其具备多通道、高精度辐射和光谱定标、高光谱分辨率等性质,可作为交叉定标基准遥感仪器评估通道式红外遥感仪器的辐射定标精度[4-6]。
基于目前应用广泛的全球空间交叉定标系统GSICS的算法规范[7],以高定标精度高光谱探测器为基准,如GSICS推荐用于红外通道交叉定标的极轨卫星红外高光谱探测仪载荷IASI和AIRS[8-10],通过同时星下点观测(SNO)的交叉定标方法经时间、空间、几何和光谱匹配筛选样本,实现高精度、高频次数据定标和精度验证[11]。
通过星下点像元的时间、空间和几何匹配筛选相同或相似观测背景样本,经过基准载荷高光谱辐射卷积多光谱载荷通道响应函数得到参考入瞳辐射[12],并与多光谱载荷通道观测辐射建立拟合关系实现定标。
理论上,SNO观测能够使两个卫星探测器载荷在同一时间和地点从不同高度观测地球,这是交叉定标必要的可行性前提,但也说明了空间、时间、几何和光谱匹配的不确定性会对样本筛选和定标偏差产生影响,所以通常需要对匹配条件作阈值限制[13-15]:如设定观测时间间隔为10 min以内,像元视场中心距离小于一定数值(根据星下点空间分辨率而定)或选定范围区域内,对两台仪器卫星观测天顶角的余弦差异(
$\left| {\cos \left( {Z{{en1}}} \right)/\cos \left( {Z{{en2}}} \right){{ - }}1} \right|$ )作约束,以及根据背景辐射的标准差与均值之比作均匀性判定。研究中[5-6,16-19]指出像元中心距离、观测几何和背景均匀性是控制样本数量和光谱辐射亮温偏差分布的主要因素,一定阈值范围的时间差异和角度差异对匹配的影响较小。文中基于我国晨昏轨道极轨气象卫星[20]风云三号E星(FY-3E)同平台HIRAS-II红外高光谱观测和MERSI-LL多光谱红外通道观测研究空间、几何和光谱匹配误差引起的交叉比对不确定性,为筛选匹配样本提供阈值判定参考。FY-3E搭载的红外高光谱大气探测仪-II型(HIRAS-II)观测光谱波段覆盖650~2550 cm−1范围共3041个通道,具有红外宽谱段连续高光谱探测和高精度定标能力;FY-3E同时搭载的中分辨率光谱成像仪-微光型(MERSI-LL)共设置七个观测通道,其中包括六个热红外通道,红外通道测量精度为0.4 K,具有高空间分辨率等性质。
文中第一部分介绍FY-3E同平台仪器HIRAS-II和MERSI-LL及相关数据集,第二部分描述数据样本点对筛选方法,第三部分将分别从空间、几何和光谱匹配三个方面单独分析样本匹配不确定性,第四部分给出总结和展望。
-
FY-3E/HIRAS-II是一台分步扫描式傅里叶变换光谱仪,一行完整的扫描周期为8 s。每一行的对地扫描共观测28个驻留视场(FOR),视场范围为±50.4°。HIRAS-II采用长波红外、中波红外和短波红外三波段多元小面阵同时观测地面同一目标,每个驻留视场包括3×3个探元(FOV)阵列,每一个探元的对地观测张角为1°,对应星下点地面瞬时视场约为14 km。HIRAS-II在FY-3D/HIRAS-I产品研制基础上[21],在探测灵敏度、光谱和辐射定量化精度以及使用寿命方面进行了重点提升,且具有更高的空间分辨率,有利于观测资料精度的进一步提高[22]。
FY-3E同卫星平台搭载的中分辨率光谱成像仪-微光型MERSI-LL采用多元并扫方式,具备晨昏轨道对微光和红外波段多光谱连续综合观测能力,其继承了FY-3D/MERSI-II设置的六个热红外通道[23],并将太阳反射波段可见光、近红外通道替换为一个微光通道,每个通道以10探元或40探元同时扫描,对地扫描视场范围为–54.7°~+50°。MERSI-LL的热红外通道中的两个红外分裂窗通道(10.8、12.0 μm)空间分辨率为250 m,其余热红外通道(3.8、4.05、7.2、8.55 μm)和微光通道(0.7 μm)空间分辨率为1000 m。通过获取可见光反射和热红外高动态范围辐射观测资料,实现对夜间目标、高亮温目标、水汽、云等参数的定量遥感。
文中采用的FY-3E/HIRAS-II数据是经过多环节预处理和光谱辐射定标处理后生成的高精度L1级业务数据产品,并进行过切趾处理。采用的FY-3E/MERSI-LL数据是经过预处理和定位处理后的L1级数据产品,选择1 km分辨率格式的观测数据和定位数据。
另外,文中使用快速辐射传输模式RTTOV(Radiative Transfer for TOVS)进行观测模拟[24],以欧洲气象中心ECMWF (European Centre for Medium-range Weather Forecasts)中的再分析数据ERA5 (the fifth generation ECMWF atmospheric reanalysis)作为模式输入信息,ERA5的日平均数据时间分辨率为3 h,空间分辨率为0.25°。
-
图1为利用FY-3E/HIRAS-II像元视场,结合同平台MERSI-LL观测辐射和ERA5再分析场资料,针对交叉定标中空间、几何和光谱匹配的不确定性分析所需的样本点对筛选过程,主要包括同平台均匀场景数据筛选和再分析场数据匹配、HIRAS-II星下点视场内匹配MERSI-LL像素,筛选得到的样本点对包含几何定位和光谱辐射信息,用于后续比对、模拟和评估。
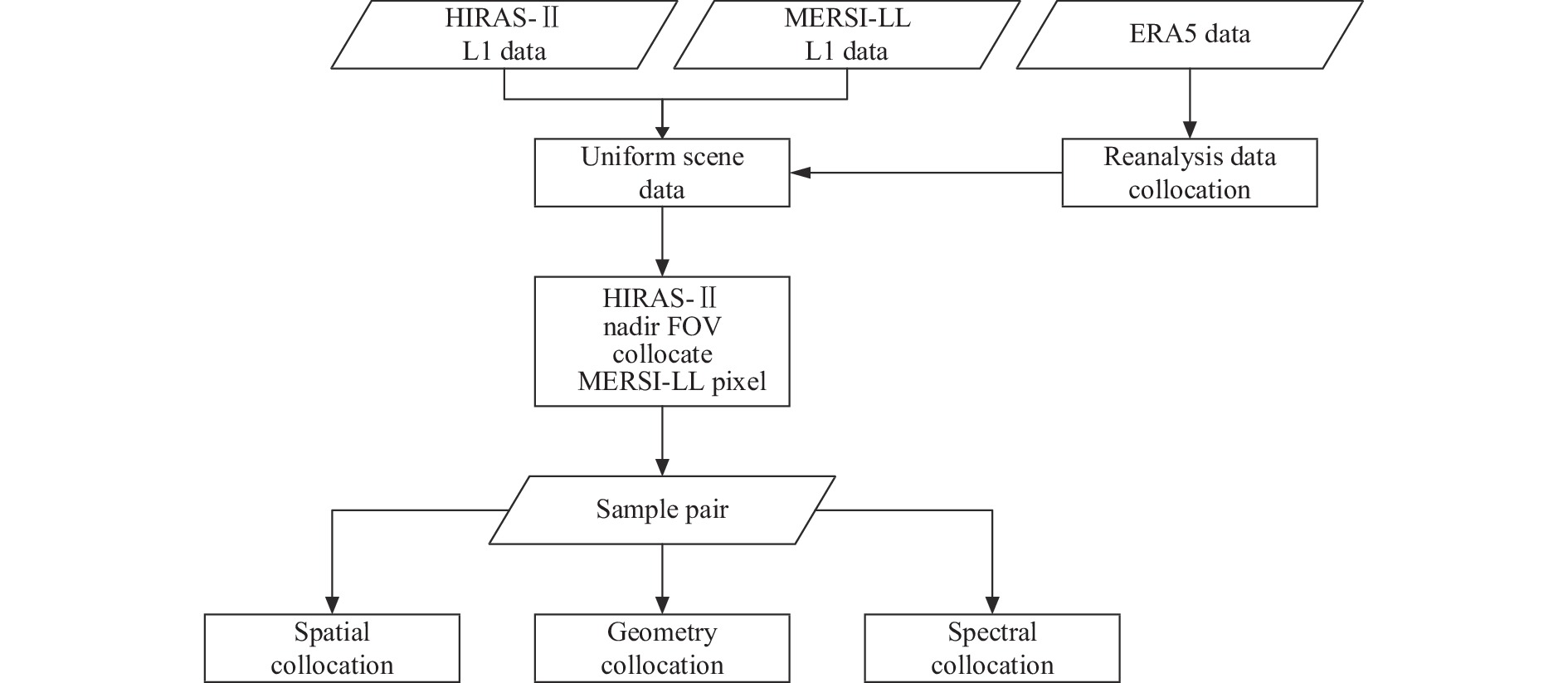
图 1 HIRAS-II和MERSI-LL样本点对筛选过程
Figure 1. Process of samples filtering between HIRAS-II and MERSI-LL
-
为了最大限度降低观测背景场不均匀引入对样本匹配不确定性分析的场景偏差,另外由于ERA5再分析场对云和降水等参数信息不能保障十分精确,且目前RTTOV在有云情况下的模拟精度不高,故实验选择在沙漠或湖泊、海洋等地表发射率较为均一的场景下挑选晴空观测背景。
晴空样本的判定条件为:根据HIRAS-II观测辐射光谱和模拟辐射光谱,选取长波红外波段窗区位置五个典型通道(810、830、850、870、890 cm−1)比较光谱亮温,要求所选通道观测辐射光谱亮温大于290 K,且与模拟辐射光谱相应通道的亮温偏差小于5 K。
另外,由于ERA5再分析场资料的时间分辨率和空间分辨率与HIRAS-II观测资料的时空网格不同,在进行辐射传输模拟之前,需要通过插值对再分析数据同HIRAS-II观测资料作时间和空间匹配。时间插值是以HIRAS-II观测资料时间为准,选择两个相邻时次的再分析资料进行线性插值;空间插值是根据HIRAS-II观测资料的地理位置信息,对再分析场进行三次样条插值。
-
在筛选出一系列均匀场景晴空HIRAS-II观测资料样本后,需要对每个HIRAS-II像元瞬时视场(FOV)内匹配MERSI-LL像素,即匹配HIRAS-II FOV足迹覆盖范围内的所有MERSI-LL像元,为减少HIRAS-II观测几何方向的影响,只提取HIRAS-II具有最小扫描角度的星下点观测。HIRAS-II星下点FOV足迹视为以1°探元固定张角从卫星投影到地球表面的圆,空间分辨率为14 km,MERSI-LL星下点像元空间分辨率1 km,取HIRAS-II星下点FOV足迹内MERSI-LL观测辐射均值,与HIRAS-II观测辐射组成用于分析空间、几何和光谱匹配不确定性的标准输入样本点对数据集。
HIRAS-II星下点FOV内匹配MERSI-LL像素的主要过程包括:(1)根据HIRAS-II样本点经纬度位置确定像元中心最接近的MERSI-LL像素位置行列号,以及以行列号为中心选定40 pixel×40 pixel区域作为环境区域;(2)通过视线LOS (line-of-sight)向量[25-26]计算HIRAS-II星下点FOV足迹覆盖范围;(3)根据视场角判断并挑选HIRAS-II星下点FOV足迹范围内的所有MERSI-LL像元,并对观测辐射取均值。匹配计算过程需进行坐标系转换,涉及的坐标系包括局部球面坐标系、站心坐标系(ENU)、大地坐标系(LLA)和地心地固坐标系(ECEF),各坐标系汇总示例如图2所示。

图 2 坐标系示例。(a) ECEF坐标系(黑色),LLA坐标系(蓝色),局部ENU坐标系(红色);(b)局部ENU坐标系和局部球面坐标系(绿色)
Figure 2. Demonstration of coordinate systems. (a) ECEF (black), LLA (blue), ENU (red); (b) ENU and local spherical coordinate (green)
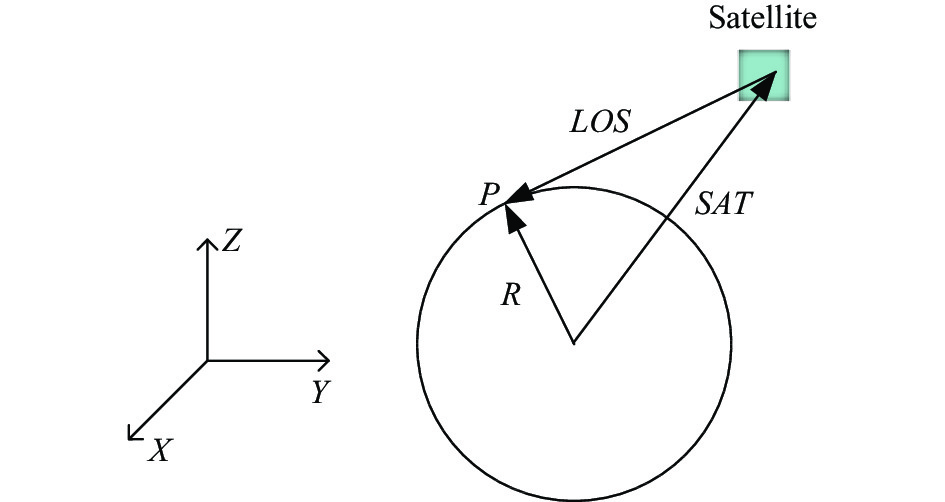
HIRAS-II和MERSI-LL地理信息中的经纬度表示LOS向量与地球交点位置P (见图2(a)),在大地坐标系中,大地经纬度通常代表水平位置,大地高度代表地球椭球上方的垂直位置,因此,大地坐标系可称为大地纬度(
$Lat$ )、经度($Lon$ )和高度($A$ )坐标系(LLA)。大地坐标系是大地测量中以参考椭球面为基准面建立起来的坐标系,计算中使用1984年世界大地测量系统(WGS84)作为大地测量参考。使用局部球面坐标系可以表示地球上给定点对应的卫星位置,所需要的定位信息包括卫星方位角
$S atAzi$ 、卫星天顶角$S atZen$ 以及卫星距离$Range$ (卫星与像素视场中心距离),以地球上该给定点为坐标原点(如图2(a)点P),以指向东边(E)为X轴、指向北边(N)为Y轴、垂直于该点的局部切平面指向天顶(U)为Z轴构成的三维直角坐标系称为局部东-北-天站心坐标系(ENU)。在ENU坐标系中的视线LOS向量即为卫星位置指向以观测位置坐标点P为原点的向量(见图2(b))。图2(b)中,由于局部ENU坐标系原点会随卫星观测位置不同发生变化,为在同一坐标系中表示不同卫星观测位置的LOS向量,可利用地心地固坐标系(ECEF)进行计算,简称地心坐标系(见图2(a))。地心坐标系以地球质心为坐标原点,X轴穿过本初子午线Prime Meridian (0°经度)和赤道Equator (0°纬度)的交点,Z轴与地球旋转轴重合并穿过北极,Y轴与X轴、Z轴构成右手坐标系并穿过赤道和90°经度交点。在ECEF坐标系中定义从地心(ECEF坐标系原点)指向卫星称为卫星向量
${{S A T}}$ ,定义从地心指向卫星观测地球表面交点称为卫星观测位置向量${{R}}$ ,从卫星位置指向观测地球表面交点为视线${{LOS}}$ 向量,向量构成如图3所示。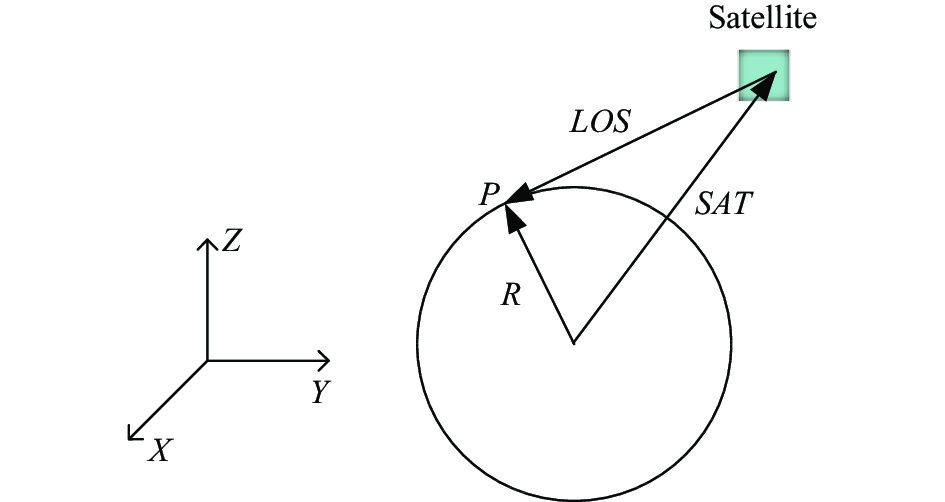
图 3 ECEF坐标系中卫星向量与LOS向量表示
Figure 3. Illustration of SAT and LOS vectors in ECEF coordinate
则ECEF坐标系下卫星向量
${{S AT}}$ 与卫星观测位置向量${{R}}$ 和视线${{LOS}}$ 向量的关系为:$$ {{S A T = R - LOS}} $$ (1) 其中,卫星观测位置向量
${{{R}}_{{\rm{ECEF}}}}(Rx,Ry,Rz)$ 是根据经纬度和大地高度定位信息$(Lon,Lat,A)$ 由LLA坐标系转换为ECEF坐标系下得到的,由于观测位置为地球表面,大地高度$A$ 简化为0。另外,HIRAS-II和MERSI-LL同平台卫星搭载,可将卫星向量${{S A}}{{{T}}_{{\rm{ECEF}}}}$ 视为是相同的,则通过计算HIRAS-II的视线向量${{LO}}{{{{{S}}}}_{{\rm{HIRAS - II}}}}$ 和MERSI-LL的视线向量${{LO}}{{{S}}_{{\rm{MERSI - LL}}}}$ ,并且比较视线向量夹角与HIRAS-II视场半锥角的大小,以实现匹配HIRAS-II视场内的MERSI-LL像素。首先,由卫星方位角
$S atAzi$ 、卫星天顶角$S atZen$ 和卫星距离$r$ 可在局部球面坐标系$(S atAzi,S atZen,r)$ 计算视线向量,根据卫星天顶角$S atZen$ 能够近似计算卫星到像素视场中心距离$r$ :$$ r = h/\cos (S atZen) $$ (2) 式中:
$h$ 为卫星的轨道高度。经转换到局部ENU坐标系得到视线向量
${{LO}}{{{S}}_{{\rm{ENU}}}}({\rm{E,N,U}})$ ,该局部坐标系坐标原点经纬度为$(Lon,Lat)$ ;然后,通过先对ENU坐标系的东轴(E)沿顺时针方向旋转${90^ \circ } - Lat$ ,使天顶轴(U)与ECEF坐标系Z轴对齐,再对ENU坐标系的天顶轴(U)沿顺时针方向旋转${90^ \circ } + Lon$ ,使东轴(E)与ECEF坐标系X轴对齐,能够将${{LO}}{{{S}}_{{\rm{ENU}}}}({\rm{E,N,U}})$ 转换为ECEF坐标系下的视线向量${{LO}}{{{S}}_{{\rm{ECEF}}}}(LO{S_X},LO{S_Y},LO{S_Z})$ 。对于每个HIRAS-II观测FOV点经纬度
$(Lo{n_{{\rm{HIRAS - II}}}}, La{t_{{\rm{HIRAS - II}}}})$ 和几何定位信息,可以得到卫星观测位置向量${{{R}}_{{\rm{HIRAS - II}}}}$ 和视线向量${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ ,由公式(2)计算卫星向量${{S A}}{{{T}}_{{\rm{ECEF}}}}{{ = }}{{{R}}_{{\rm{HIRAS - II}}}}{{ - LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ ,再根据HIRAS-II经纬度$(Lo{n_{{\rm{HIRAS - II}}}},La{t_{{\rm{HIRAS - II}}}})$ 确定的环境区域内MERSI-LL像素的经纬度序列得到卫星观测位置向量序列${{{R}}_{{\rm{MERSI - LL}}}}$ ,则MERSI-LL的视线向量序列为${{LO}}{{{S}}_{{\rm{MERSI - LL}}}} = {{{R}}_{{\rm{MERSI - LL}}}} - {{S A}}{{{T}}_{{\rm{ECEF}}}}$ 。HIRAS-II的视线向量
${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ 指向了FOV的视场中心,其FOV足迹是以${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ 为轴、以探元张角$\varphi $ 一半为半锥角的锥体形成的地面投影,若MERSI-LL像素落入HIRAS-II FOV足迹范围内,则MERSI-II的视线向量${{LO}}{{{S}}_{{\rm{MERSI - LL}}}}$ 与HIRAS-II的视线向量${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ 夹角应小于$\varphi $ 的一半,$\varphi $ 为1°。视线向量
${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ 和${{LO}}{{{S}}_{{\rm{MERSI - LL}}}}$ 的向量夹角$\theta $ 的余弦可表示为:$$ \cos (\theta ) = \frac{{{{LO}}{{{S}}_{{\rm{HIRAS - II}}}} \cdot {{LO}}{{{S}}_{{\rm{MERSI - LL}}}}}}{{\left\| {{{LO}}{{{S}}_{{\rm{HIRAS - II}}}}} \right\|\left\| {{{LO}}{{{S}}_{{\rm{MERSI - LL}}}}} \right\|}} $$ (3) 式中:
$\left\| \cdot \right\|$ 为向量的模。公式(3)根据欧几里得向量点积公式推导得到,向量夹角$\theta $ 在$(0,\pi /2)$ 范围内,其余弦值呈递减趋势,随夹角增大而变小,所以若MERSI-LL像素落入HIRAS-II FOV足迹,则应满足:$$ \frac{{{{LO}}{{{S}}_{{\rm{HIRAS - II}}}} \cdot {{LO}}{{{S}}_{{\rm{MERSI - LL}}}}}}{{\left\| {{{LO}}{{{S}}_{{\rm{HIRAS - II}}}}} \right\|\left\| {{{LO}}{{{S}}_{{\rm{MERSI - LL}}}}} \right\|}} \gt \cos (\varphi /2) $$ (4) 式中:
$\varphi $ 为HIRAS-II探元固定张角,即视线向量${{LO}}{{{S}}_{{\rm{HIRAS - II}}}}$ 和${{LO}}{{{S}}_{{\rm{MERSI - LL}}}}$ 的向量夹角$\theta $ 小于HIRAS-II FOV半锥角,表明此时的MERSI-LL像素在HIRAS-II FOV内。 -
对HIRAS-II FOV内的MERSI-LL像素序列求辐射均值后与HIRAS-II FOV的观测辐射组成样本点对,并将HIRAS-II FOV足迹覆盖范围称为靶区,分别从空间位置、几何观测角度和光谱响应函数三个方面添加扰动,分析匹配误差引入的不确定性。
(1)空间匹配方面,以靶区辐射亮温作为标准值,通过沿经向或者纬向整体移动FOV足迹模拟空间失配,移动足迹后的靶区辐射亮温作为扰动值。比较扰动值与标准值的亮温均值偏差百分比、亮温均值偏差标准差;定义靶区亮温标准差与亮温均值之比为背景不确定度,比较FOV移动前后因空间失配造成的背景辐射亮温相对不确定度。
(2)几何匹配方面,以样本点对的HIRAS-II观测光谱辐射亮温作为标准值,将再分析数据插值到该样本点时空网格并输入至RTTOV中,通过改变卫星天顶角输出模拟光谱辐射亮温作为扰动值。比较观测几何卫星天顶角改变前后模拟光谱与标准值光谱的辐射亮温偏差和相对精度。
(3)光谱匹配方面,通过HIRAS-II红外高光谱辐射与MERSI-LL的通道光谱响应函数可模拟计算得到高光谱等效辐射,设HIRAS-II光谱辐射为
$ R(\nu ) $ ,MERSI-LL的某一通道光谱响应函数为$ S(\nu ) $ ,则模拟等效辐射$ L $ 为:$$ L = \frac{{\displaystyle\int_{{\nu _1}}^{{\nu _2}} {R(\nu )S(\nu ){\rm{d}}\nu } }}{{\displaystyle\int_{{\nu _1}}^{{\nu _2}} {S(\nu ){\rm{d}}\nu } }} $$ (5) 式中:
$ \nu $ 代表波段;$ {\nu _1} $ 和$ {\nu _2} $ 为波段的起始和终止波数。相同高光谱辐射输入条件下,由于光谱响应函数的差异将导致模拟等效辐射不同,进而影响定标精度。在不改变HIRAS-II样本光谱辐射$ R(\nu ) $ 的情况下,将$ R(\nu ) $ 与MERSI-LL的标准通道光谱响应函数$ S(\nu ) $ 计算的模拟等效辐射$ L $ 作为标准值,分别对光谱响应函数采用展宽或收缩、中心波长平移的方式进行扰动,再计算扰动后的模拟等效辐射${L'}$ 。统计所有样本点的模拟等效辐射亮温,比较扰动前后亮温均值偏差和偏差标准差,定义亮温均值偏差与标准亮温均值之比为光谱匹配误差引入的不确定度。 -
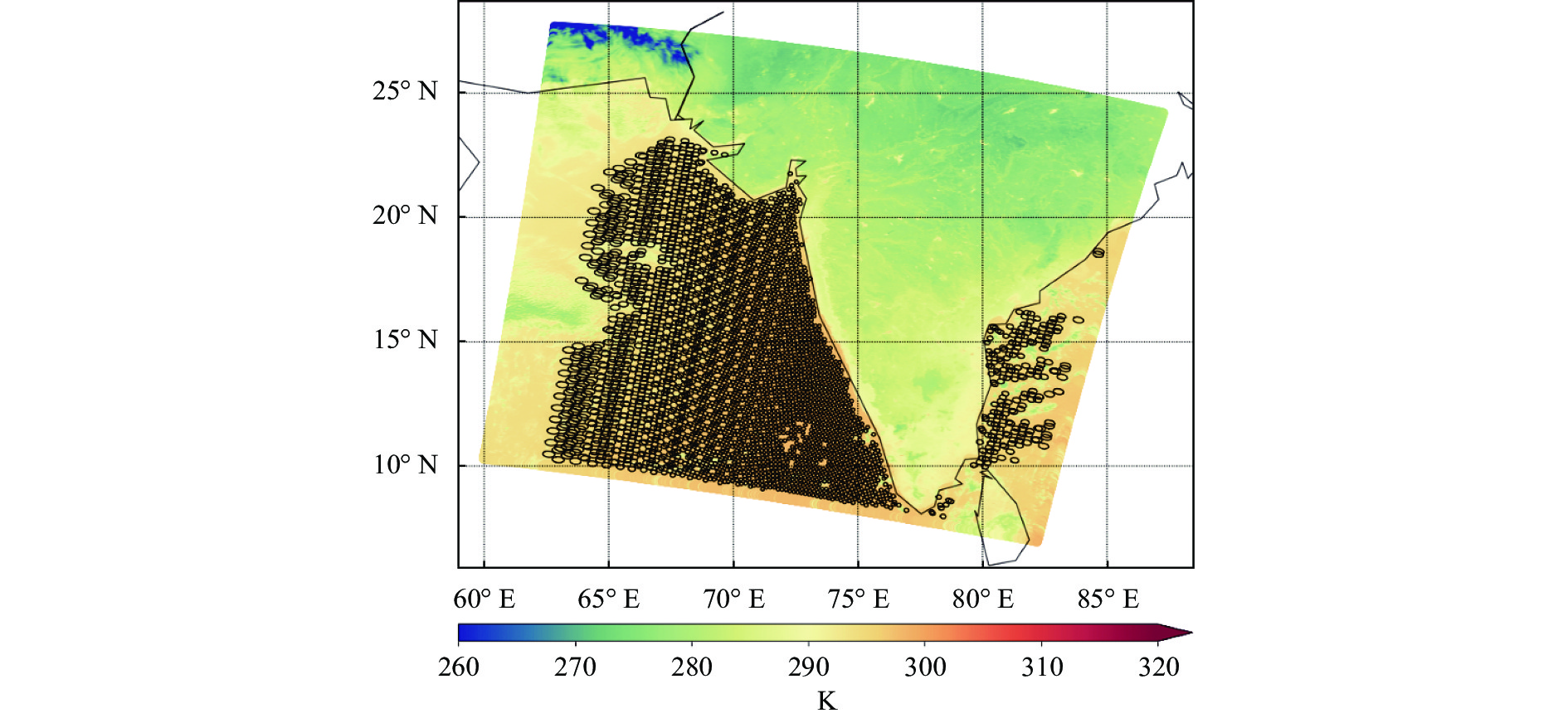
以UTC202112210050时次FY-3E同平台HIRAS-II和MERSI-LL观测辐射为例,根据2.1节筛选均匀背景环境后的HIRAS-II FOV扫描足迹如图4所示。

图 4 UTC202112210050 HIRAS-II和MERSI-LL同平台观测辐射
Figure 4. Observation of HIRAS-II and MERSI-LL on UTC202112210050
图中观测背景为MERSI-LL 3.8 μm通道辐射亮温,黑色圈点为HIRAS-II的FOV扫描足迹。选择HIRAS-II星下点FOV样本通过2.2节方法匹配足迹范围内的MERSI-LL像素,并进行空间失配模拟,分别为沿经向和沿纬向移动足迹。选择MERSI-LL通道3.8、4.05、7.2、8.55、10.8、12.0 μm分别作为观测背景,设定模拟空间失准范围为1~50 km (即最大偏移距离约为三倍HIRAS-II FOV星下点空间分辨率),统计所有HIRAS-II星下点FOV样本分别沿经向和纬向模拟空间失配后的FOV足迹内背景辐射亮温变化、与标准均值亮温比较绝对偏差百分比和均值亮温偏差标准差、以及FOV内靶区亮温标准差与均值之比。图5为MERSI-LL 3.8 μm通道背景下FOV沿经向偏移的空间失准模拟偏差对比结果。
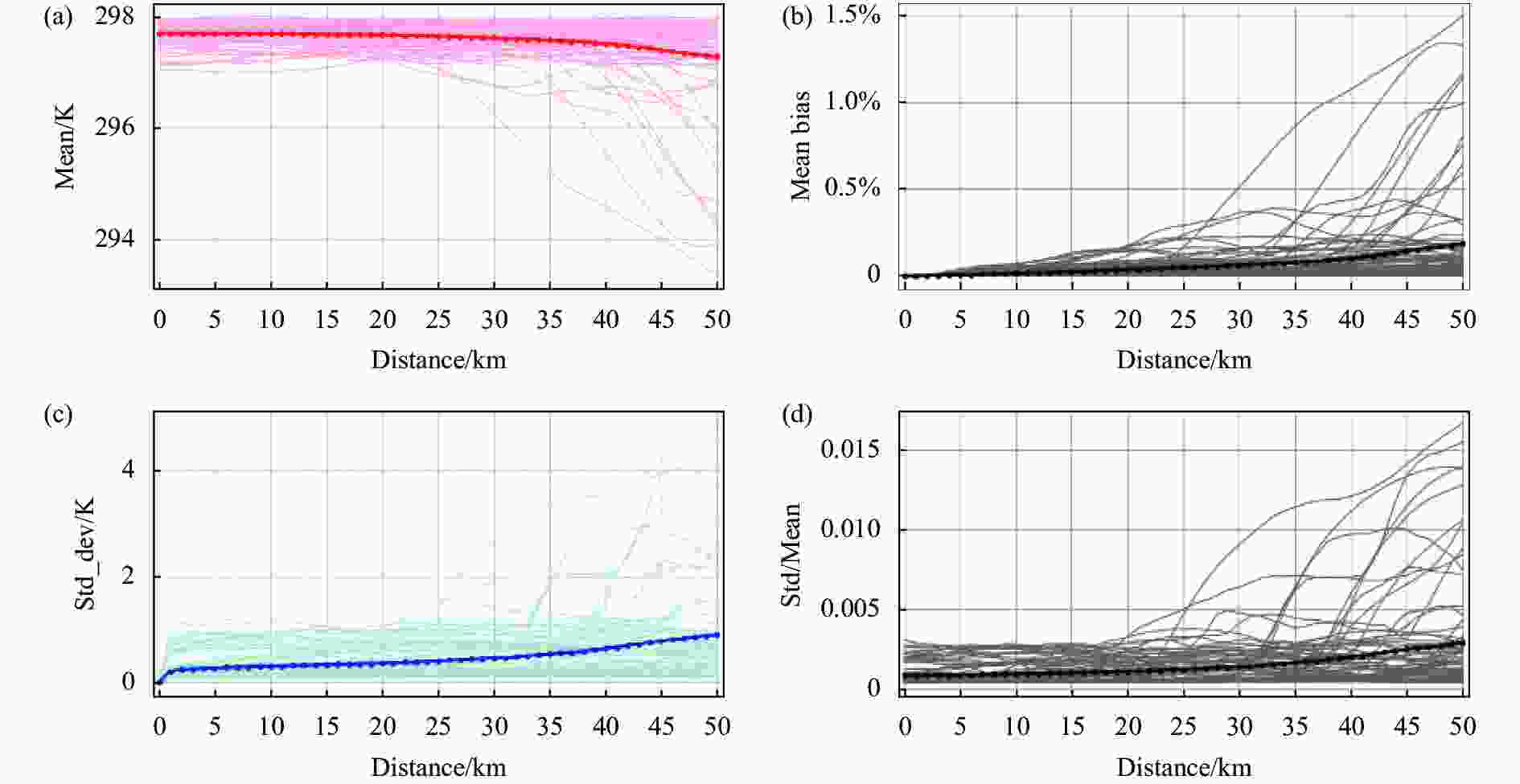
图 5 MERSI-LL 3.8 μm通道背景模拟HIRAS-II星下点FOV沿经向偏移。(a)靶区辐射亮温;(b)与标准靶区亮温的绝对偏差百分比;(c)与标准靶区亮温的偏差标准差;(d)靶区亮温标准差与均值之比
Figure 5. Shift along longitude of HIRAS-II FOV within band 3.8 μm of MERSI-LL. (a) Randiance brightness temperature of target; (b) Absolute bias percent of brightness temperature vs standard target; (c) Standard bias of brightness temperature vs standard target; (d) Ratio of standard bias and mean bias of standard target
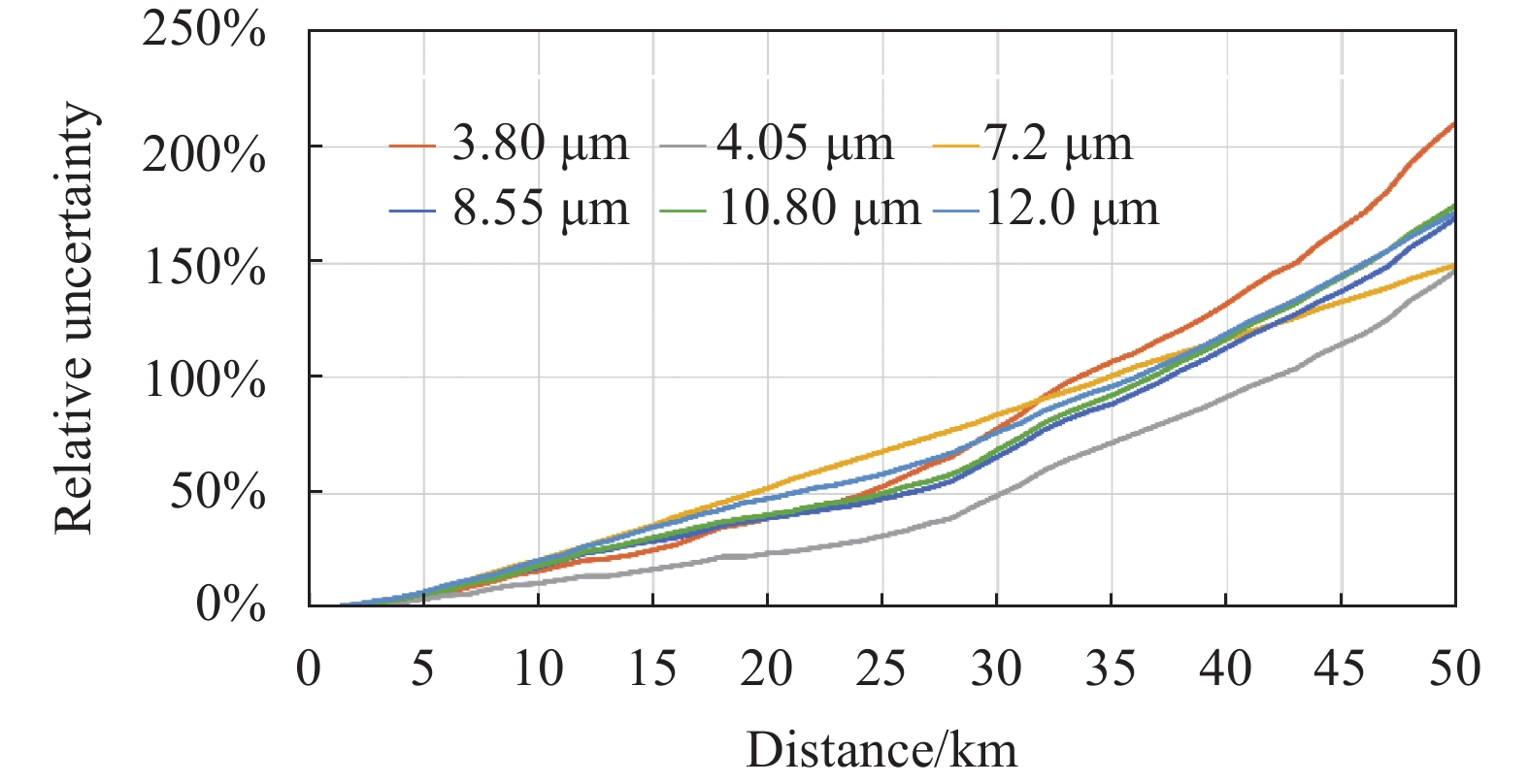
图中浅色背景曲线代表各个样本分布结果,深色曲线代表统计平均结果。整体上,沿经向和沿纬向偏移得到的模拟结果相似,由于所选样本观测区域为均匀晴空,从图5(a)中可以看出靶区背景亮温整体高于290 K,MERSI-LL其他通道(除7.2 μm水汽通道外)背景亮温也表现出相同的规律,且模拟FOV偏移1~50 km范围背景亮温波动在2 K以内,FOV内靶区亮温标准差与均值之比稳定(图5(d)),都能够表明所选观测区域符合均匀晴空条件。图5(b)和图5(c)反映了FOV模拟偏移后与原始位置的亮温变化对比。为进一步与标准观测背景比较不确定度,统计不同偏移距离下靶区标准差与均值之比相对于标准靶区标准差与均值之比的偏差,即背景辐射亮温相对不确定度,如图6所示。

图 6 FOV偏移引起的背景辐射亮温相对不确定度
Figure 6. Relative uncertainty of background brightness temperature due to FOV shift
相对不确定度能够表现当出现空间失配时,像元视场内靶区观测背景亮温的偏差程度,当像元中心偏移距离为星下点空间分辨率一半(约7 km)时引起的空间相对不确定度约为10%;偏移距离为星下点空间分辨率(14 km)时能够引起25%~30%的空间相对不确定度。
-
以HIRAS-II星下点FOV观测辐射光谱亮温为标准值,以每2°为间隔调整卫星天顶角(最大设置为46°),经RTTOV模拟得到扰动的辐射光谱,选择典型通道比较辐射亮温偏差,统计天顶角变化引起的观测几何不确定度。
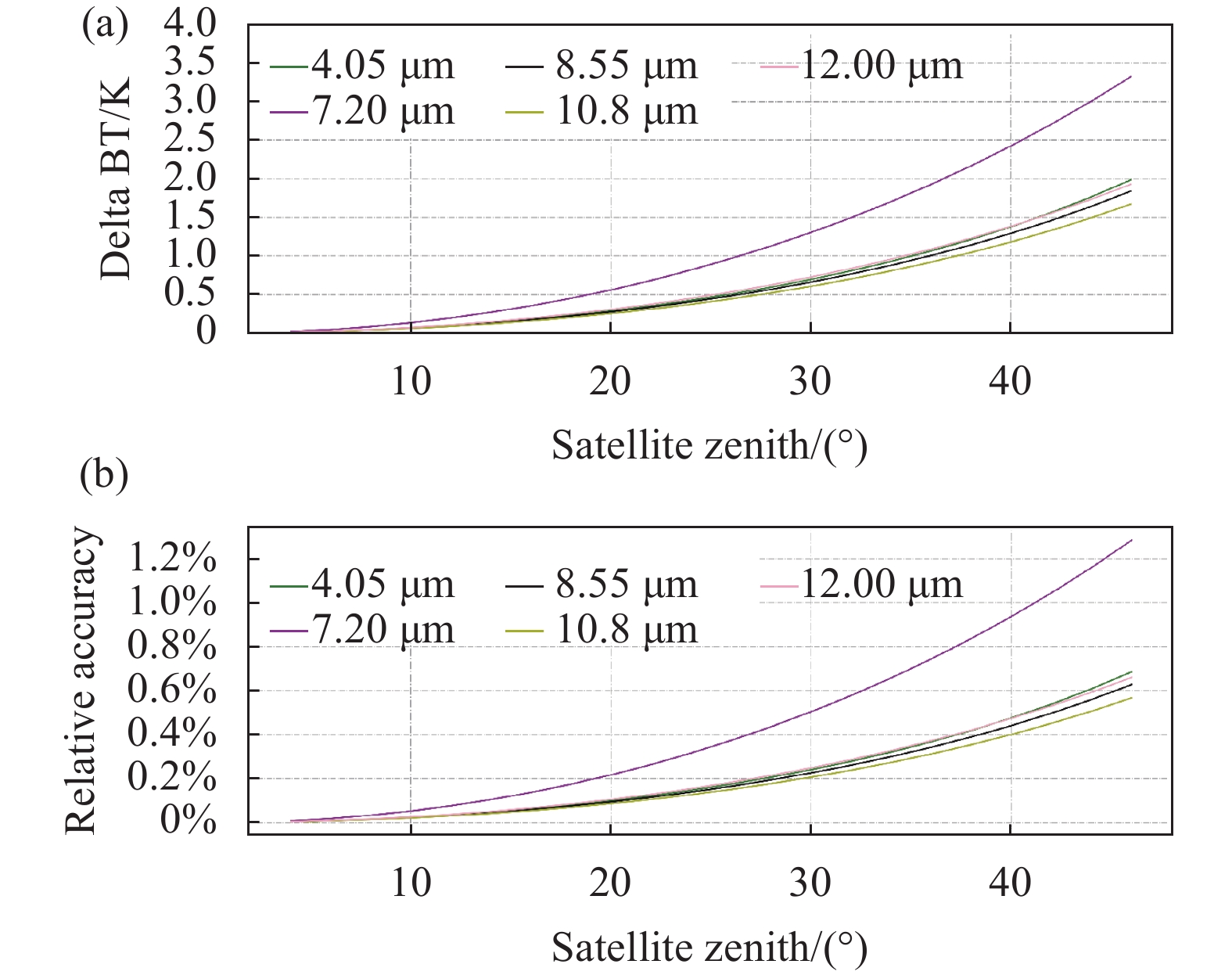
选择MERSI-LL 4.05、7.2、8.55、10.8、12.0 μm作为典型通道,取通道光谱响应函数波段范围(具体见3.3节)内的光谱辐射均值亮温,比较标准光谱与模拟光谱的均值亮温偏差,定义亮温偏差与标准亮温之比为相对精度,即观测几何相对不确定度,图7所示为标准光谱与模拟光谱亮温偏差随卫星天顶角变化曲线和相对精度变化。

图 7 观测几何变化引起的亮温偏差及其不确定度
Figure 7. Brightness temperature bias and uncertainty of observation geometry
图7(a)和图7(b)分别为各典型通道光谱波段标准光谱与模拟光谱的辐射均值亮温偏差随卫星天顶角变化曲线和相对精度变化曲线。整体上,偏差和相对精度均随卫星天顶角变大而增大,且表现规律一致。其中,7.2 μm通道亮温偏差和相对精度受卫星天顶角变化影响最大,当卫星天顶角设置为46°时的模拟光谱与标准光谱的亮温均值偏差约为3.5 K,相对精度约为1.3%。分析原因,可能由于时空变化对水汽通道影响明显或再分析资料高层水汽廓线精度存在误差,导致模拟光谱部分通道出现偏差。其余通道相对精度较为稳定一致,整体未引起较大变化,在30°卫星天顶角位置时相对精度约为0.22%,在最大天顶角位置优于0.7%。
-
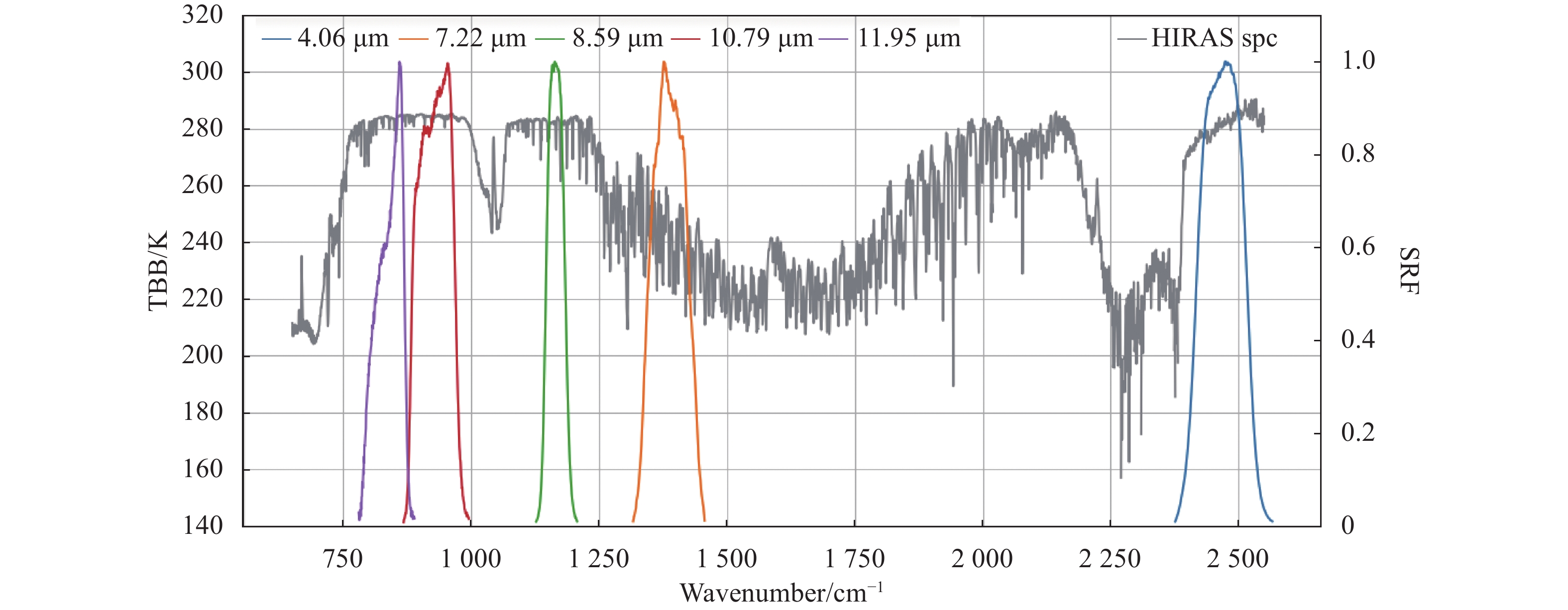
HIRAS-II光谱波段覆盖650~2550 cm−1,能够与MERSI-LL 4.05 μm (通道3)、7.2 μm (通道4)、8.55 μm (通道5)、10.8 μm (通道6)和12.0 μm (通道7)的通道响应函数匹配,如图8所示,再根据公式(5)可得到MERSI-LL各通道的模拟等效辐亮度。
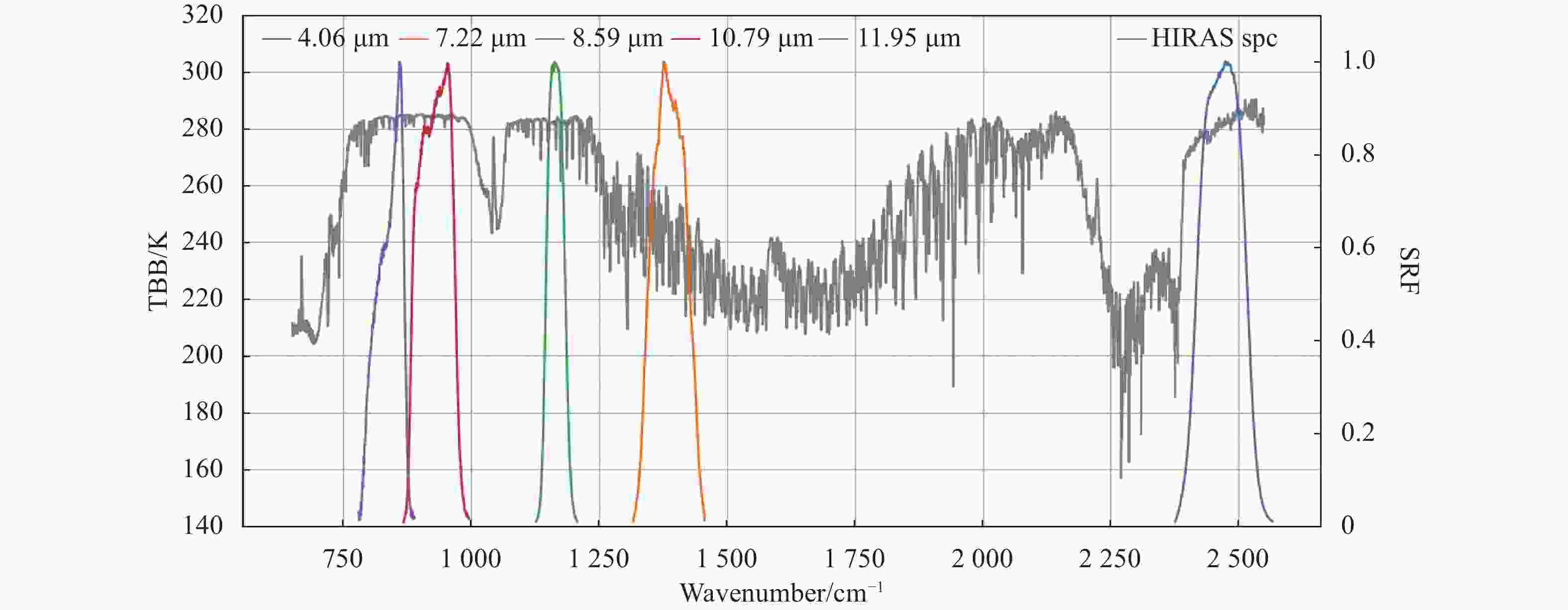
图 8 HIRAS-II光谱与MERSI-LL光谱响应函数匹配
Figure 8. Collocation of HIRAS-II spectrum and MERSI-LL spectrum response function
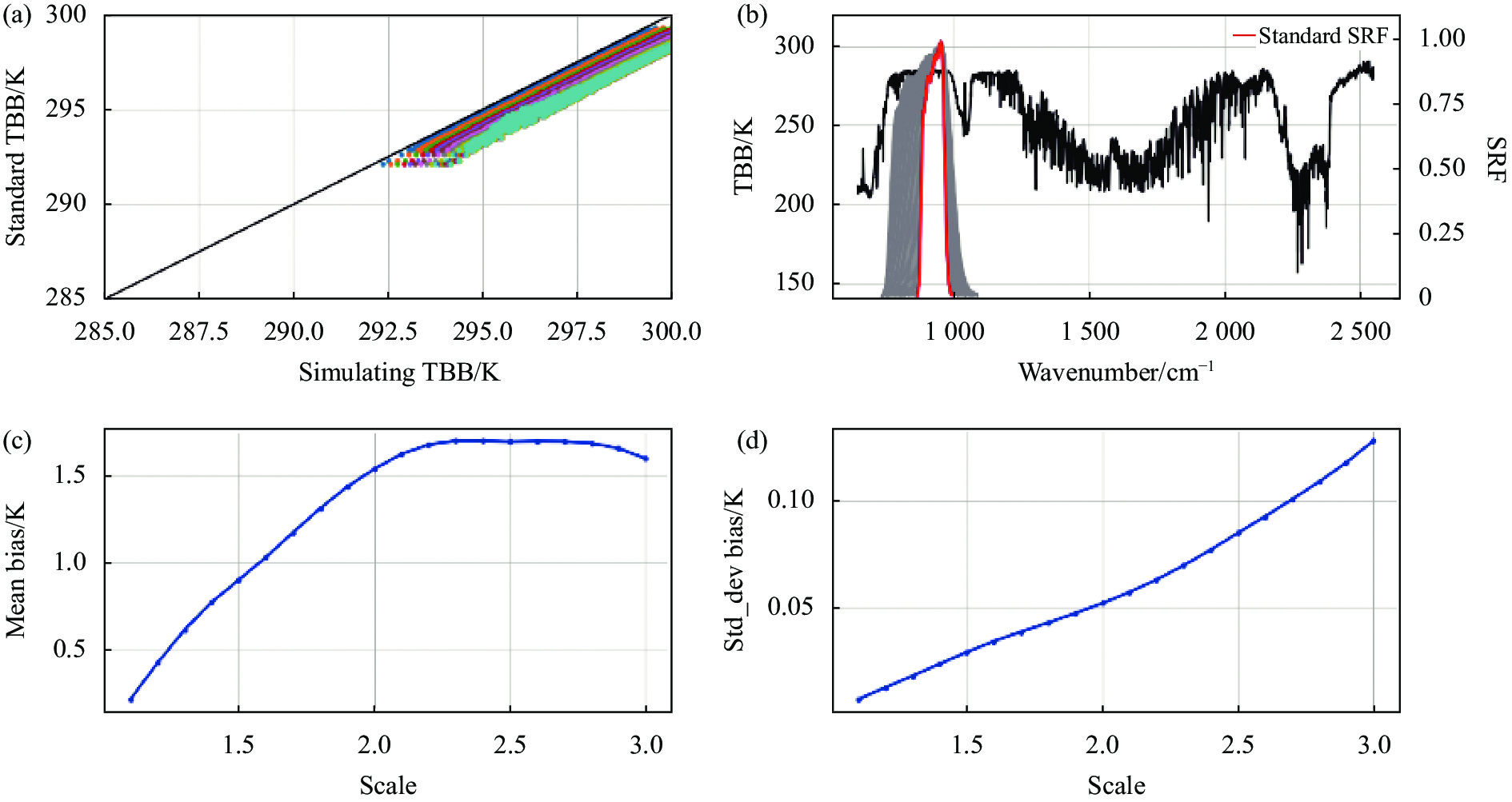
保持HIRAS-II输入样本不变,改变MERSI-LL各通道的光谱响应函数后重新计算等效辐亮度。(1)光谱响应函数展宽或收缩:保持标准光谱响应函数中心波长位置和通道数目不变,改变其波长间隔,将波长间隔放大称为展宽,反之缩小称为收缩。其中,展宽范围为原始波长间隔的1.1~3倍,收缩范围为原始波长间隔的0.99~0.7倍;(2)光谱响应函数平移:保持标准光谱响应函数的波长间隔不变,分别向波长增加和波长减小方向平移,单次平移0.1个波数间隔,最大平移量为10倍波长间隔。以MERSI-LL 10.8 μm通道为例,图9为模拟光谱响应函数经过展宽后的光谱等效辐射亮温变化结果。

图 9 光谱响应函数展宽模拟前后光谱等效辐射亮温变化
Figure 9. Change of spectrum equivalent radiance brightness temperature after expanding spectrum response function
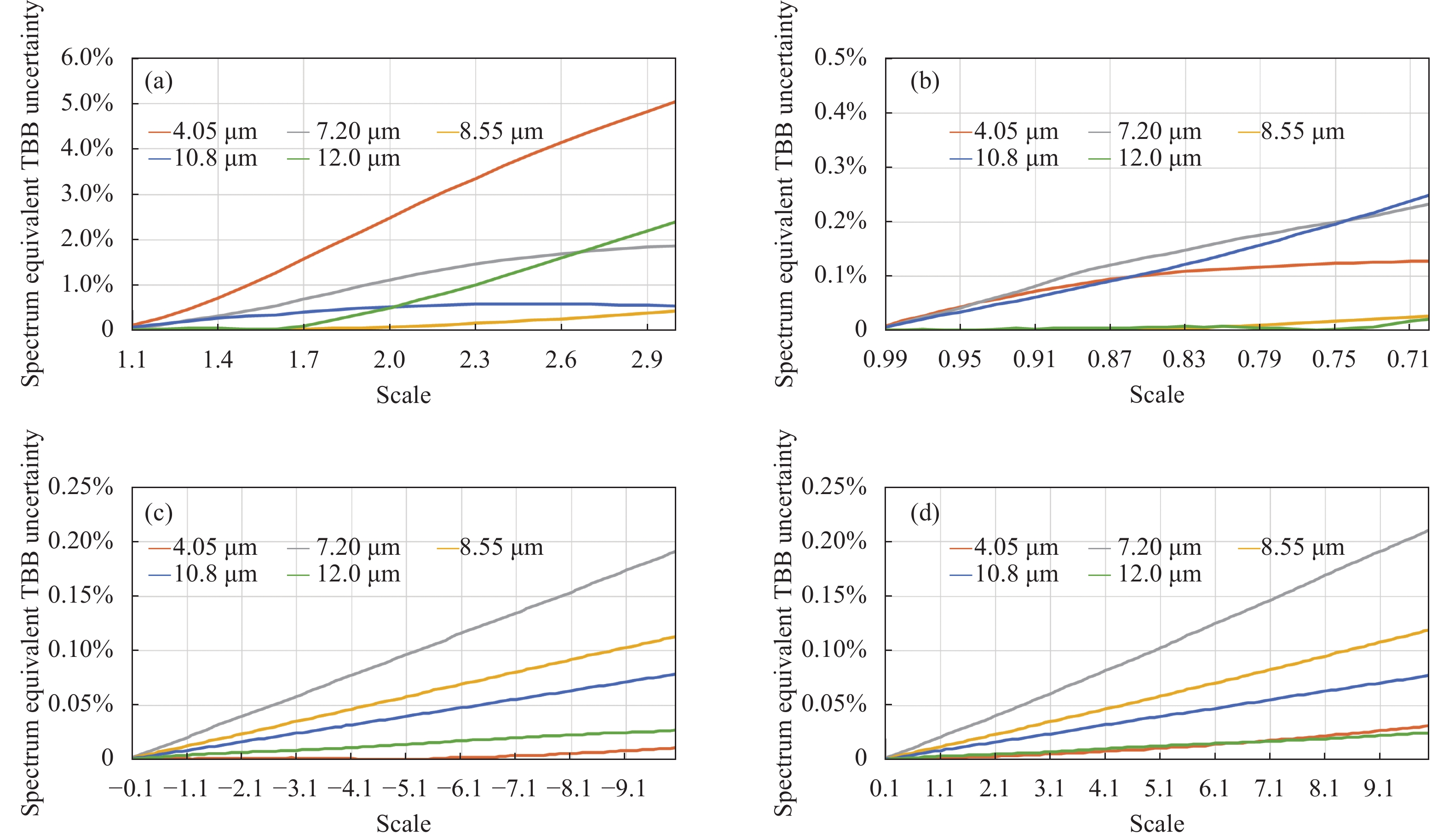
图9(a)为HIRAS-II光谱辐射分别与标准光谱响应函数和模拟光谱响应函数计算得到的等效辐射亮温散点分布(纵轴:标准亮温,横轴:模拟亮温);图9(b)为标准光谱响应函数(红色)与模拟光谱响应函数(灰色叠加)的波段位置分布;图9(c)和图9(d)分别为对比辐射亮温的均值偏差(模拟-标准)和偏差标准差。在对光谱响应函数采用的四种不同模拟变化方式中可以看出,改变光谱响应函数均会引起光谱等效辐射亮温产生偏差,且偏差随着变化幅度增大而增加,其中展宽和收缩光谱响应函数带来的影响更为明显,向波长增加或向波长减小方向平移光谱响应函数产生的影响相似。统计光谱等效辐射亮温均值偏差(模拟-标准)与标准辐射亮温之比,即光谱等效辐射亮温的不确定度结果如图10所示。
展宽模拟光谱响应函数后(图10(a))的光谱等效辐射亮温具有较大的不确定性,其中4.05 μm不确定性较大,展宽1.5倍波长间隔对吸收通道的亮温不确定度约为0.5%~1%,展宽两倍波长间隔对吸收通道的亮温最大不确定度接近2.5%,窗区通道也将受到0.4%的影响;收缩模拟光谱响应函数后(图10(b))的光谱等效辐射亮温不确定度变化幅度较低,整体优于0.3%,当收缩0.1倍波长间隔时的亮温不确定度均在0.1%以内。
平移模拟光谱响应函后(图10(c)和图10(d))引起的光谱等效亮温不确定度整体变化较小,平移五倍波长间隔时优于0.1%,移动10倍波长间隔时仍优于0.25%。

图 10 光谱响应函数引起的光谱等效辐射亮温不确定度
Figure 10. The uncertainty of spectrum equivalent radiance brightness temperature due to spectrum response function
-
星载红外高光谱探测仪与通道式目标传感器进行交叉定标前,需要对共同观测区域匹配观测样本,减少空间、时间、观测角度和光谱匹配误差引入的不确定度是筛选可靠样本以提高定标精度的关键前提。文中通过视线向量方法匹配均匀环境背景下FY-3E同平台HIRAS-II载荷视场内的MERSI-LL载荷像素作为样本序列,单独分析空间、观测角度和光谱匹配误差引入的不确定度,得到以下结论:
(1)像元视场偏移将造成空间失配,引起观测背景辐射发生变化。当像元中心偏移距离约为星下点视场空间分辨率一半时的空间匹配不确定度为10%,当偏移距离约为一个像元时的空间相对不确定度为25%~30%。
(2)观测天顶角差异将造成几何匹配失准,引起观测辐射偏差。各通道光谱在观测天顶角20°时的几何匹配不确定度均优于0.2%,最大天顶角位置时,除水汽通道受精度、受时空或模拟资料影响外,其余通道的几何匹配不确定度均优于0.7%。
(3)光谱响应函数差异将造成模拟等效辐亮度偏差,进而影响定标精度。光谱响应函数发生展宽时相对于收缩和平移能够引起更大的等效辐亮度偏差,展宽两倍波长间隔对吸收通道的亮温最大不确定度接近2.5%,窗区通道为0.4%;光谱响应函数收缩时引起的不确定度整体优于0.3%,且收缩0.1倍波长间隔时小于0.1%;光谱响应函数平移引起的不确定度变化相对较小,平移五倍波长间隔时优于0.1%,平移10倍波长间隔时仍优于0.25%。
该研究利用同卫星平台红外传感器分析交叉定标匹配过程由空间、几何和光谱匹配误差引起的不确定度,为设定合理的阈值筛选条件提供了参考,同时也为后续提升交叉比对和定标精度订正提供了依据。
Uncertainty analysis of inter-calibration collocation based on FY-3E spaceborne infrared observations
-
摘要: 星载红外高光谱传感器与多通道光谱传感器在轨交叉定标时能够提升数据精度和质量,交叉定标样本通常采用星下点交叉方式匹配筛选,包括空间、时间、观测几何角度和光谱匹配,匹配误差的不确定性将对最终交叉定标精度产生影响。采用FY-3E同平台红外高光谱大气探测仪HIRAS-II和中分辨率光谱成像仪MERSI-LL均匀晴空背景进行观测,根据视线向量匹配HIRAS-II星下点瞬时视场内的MERSI-LL像素,分别通过模拟视场偏移、观测天顶角偏差和光谱响应函数变化单独分析空间、观测几何角度和光谱匹配误差引入的匹配不确定度。结果表明,空间失配引起观测背景辐射亮温变化,偏移一半像元视场时的相对不确定度约为10%,达到一个像元时为25%~30%;观测几何角度失准引起光谱辐射亮温变化,观测天顶角偏移20°时的不确定度优于0.2%;光谱响应函数差异引起光谱等效辐射亮温变化,响应函数发生展宽时对吸收通道的不确定度最大约为2.5%,窗区通道为0.4%,收缩时的不确定度整体优于0.3%,平移引起的不确定度相对较小,移动5倍波长间隔时优于0.1%。Abstract:
Objective Spaceborne infrared hyperspectral sensors and multi-channel spectral sensors can continuously observe the earth for a long period of time, and have important applications in the fields of climate prediction, weather change, environmental monitoring, etc. The high-precision spectral calibration and radiation calibration of their observation data are crucial to the quantitative application of remote sensing. With the increase of operational time of satellite after being launched, the performance of the spaceborne sensors will change, which will lead to the deviation of observation data accuracy. Therefore, it is necessary to effectively improve the calibration accuracy and the data quality of the instrument through on-orbit inter-calibration. The samples of inter-calibration are generally collocated and filtered through the method of the on-orbit alternative calibration of the Global Space-based Inter-Calibration Sytem (GSICS), including spatial, temporal, observation geometry and spectral collocation through simultaneous nadir overpass (SNO) observations, and consequently achieve the goal of inter-calibration with the target sensor. The SNO observations can make two satellite sensors observe the earth from different heights at the similar time and place, which fully reduces the comparison uncertainty caused by different observation time and angle of satellites. This is a necessary prerequisite for the feasibility of inter-calibration, but these factors are also the main source of calibration uncertainty, and the uncertainty of collocating bias will have effects on the inter-calibration accuracy finally. Therefore, we analyze the uncertainty of the samples collocating processing in this paper, including spatial collocation, observation angle collocation and spectral response function collocation between sensors. Methods We establish the sifting process of inter-observation sample pairs above uniform clear-sky background scenes (Fig.1) of the infrared hyperspectral atmospheric sounder HIRAS-II and the low-light medium-resolution spectral imager MERSI-LL onboard the same platform of the FY-3E of China Fengyun-3 series sun-synchronous orbit meteorological satellite. Collocating MERSI-LL pixels within HIRAS-II nadir instantaneous field of view (IFOV) based on line-of-sight (LOS) vectors, HIRAS-II projects the FOV footprint from the satellite to the earth's surface at a fixed solid angle, and all coordinates are converted into Earth Centered Earth Fixed (ECEF) coordinate system after calculation. All MERSI-LL pixels in the coverage area of HIRAS-II FOV footprint can be determined by calculating the line-of-sight vector (Fig.3). The uncertainty of the samples collocation introduced by spatial, observation geometry and spectral collocating bias is separately analyzed by simulating IFOV shift, observation zenith angle deviation and spectral response function change, respectively. Results and Discussions The results of uncertainty analysis above each section of collocating process through cross observation of sensors on the same platform, radiation transmission model simulation and statistical analysis show that, in terms of spatial collocation, we evaluated the percentage deviation and standard deviation of radiance brightness temperature between the disturbed value and the standard value (Fig.5) by comparing the standard value of radiance brightness temperature in the target area with the disturbed value of radiance brightness temperature after simulating pixel offset, the spatial mis-collocation causes the changes of radiance brightness temperature above observed background scenes, the relative uncertainty is approximately 10% when the IFOV is shifted by half a pixel. In terms of geometric collocation, we evaluated the deviation and relative accuracy of the brightness temperature of the observed and simulated spectrum by comparing the brightness temperature sample of spectrum observed by HIRAS-II with the simulated spectral brightness temperature after changing the satellite zenith angle, it is found that the misalignment of observation geometry causes deviation of spectrum radiance brightness temperature, the uncertainty is less than 0.2% when the observed zenith angle is shifted by 20 degree (Fig.7). In terms of spectral collocation, the hyperspectral equivalent radiance can be obtained by simulating and calculating the HIRAS-II infrared hyperspectral radiance and channel spectral response function of MERSI-LL. The difference of the spectral response function causes bias of spectral equivalent radiance brightness temperature, the uncertainty of the absorption channel and window channle is approximately 2.5% and 0.4% respectively for expanding the response function, and the uncertainty is better than 0.3% overall for shrinking the response function, the uncertainty is relatively small for shifting response function, and it is better than 0.1% when shifting five times the wavelength interval (Fig.9). Conclusions In this study, we analyzed the uncertainty and its influence introduced by observation collocation in terms of spatial, observation geometry and spectral collocation, which are aimed at the spaceborne infrared hyperspectral sensors and multi-channel spectral sensors before inter-calibration. We used the pixel matching method above observation field based on the line-of-sight vector to separately analyze the uncertainty introduced by spatial, observation geometry and spectral collocating bias. The spatial mis-collocation caused by IFOV shift leads to the change of observation background radiance, the relative uncertainty is approximately 25%-30% when the IFOV is shifted by a pixel. In order to reduce the uncertainty introduced by pixel offset, the offset distance should be limited to half of the spatial resolution of the nadir instantaneous field of view. The misalignment of observation geometry caused by observation zenith angle difference leads to the bias of observation background radiance, and the bias is more obvious in vapor channel, the deviation of observation zenith angle should be constrained within 10 degree or more less. The deviation of hyperspectral equivalent radiance caused by the difference of spectral response function has an impact on the calibration accuracy, the effective bandwidth change of spectral response function will cause greater uncertainty relative to the central wavelength shift of spectral response function. This study provides a reference for setting reasonable threshold in the condition of sifting collocated samples before inter-calibration, and also provides support for improving accuracy of inter-comparison and calibration. -
Key words:
- infrared inter-calibration /
- inter-collocation /
- uncertainty
-
图 1 HIRAS-II和MERSI-LL样本点对筛选过程
Figure 1. Process of samples filtering between HIRAS-II and MERSI-LL
图 2 坐标系示例。(a) ECEF坐标系(黑色),LLA坐标系(蓝色),局部ENU坐标系(红色);(b)局部ENU坐标系和局部球面坐标系(绿色)
Figure 2. Demonstration of coordinate systems. (a) ECEF (black), LLA (blue), ENU (red); (b) ENU and local spherical coordinate (green)
图 3 ECEF坐标系中卫星向量与LOS向量表示
Figure 3. Illustration of SAT and LOS vectors in ECEF coordinate
图 4 UTC202112210050 HIRAS-II和MERSI-LL同平台观测辐射
Figure 4. Observation of HIRAS-II and MERSI-LL on UTC202112210050
图 5 MERSI-LL 3.8 μm通道背景模拟HIRAS-II星下点FOV沿经向偏移。(a)靶区辐射亮温;(b)与标准靶区亮温的绝对偏差百分比;(c)与标准靶区亮温的偏差标准差;(d)靶区亮温标准差与均值之比
Figure 5. Shift along longitude of HIRAS-II FOV within band 3.8 μm of MERSI-LL. (a) Randiance brightness temperature of target; (b) Absolute bias percent of brightness temperature vs standard target; (c) Standard bias of brightness temperature vs standard target; (d) Ratio of standard bias and mean bias of standard target
图 6 FOV偏移引起的背景辐射亮温相对不确定度
Figure 6. Relative uncertainty of background brightness temperature due to FOV shift
图 7 观测几何变化引起的亮温偏差及其不确定度
Figure 7. Brightness temperature bias and uncertainty of observation geometry
图 8 HIRAS-II光谱与MERSI-LL光谱响应函数匹配
Figure 8. Collocation of HIRAS-II spectrum and MERSI-LL spectrum response function
图 9 光谱响应函数展宽模拟前后光谱等效辐射亮温变化
Figure 9. Change of spectrum equivalent radiance brightness temperature after expanding spectrum response function
-
[1] Xu Jianmin, Yang Jun, Zhang Zhiqing, et al. Chinese meteorological satellites, achievements and applications [J]. Meteorological Monthly, 2010, 36(7): 94-100. (in Chinese) [2] Hilton F, Armante R, August T, et al. Hyperspectral Earth observation from IASI: Five years of accomplishments [J]. Bulletin of the American Meteorological Society, 2012, 93(3): 347-370. doi: 10.1175/BAMS-D-11-00027.1 [3] Xu Na, Hu Xiuqing, Chen Lin, et al. Inter-calibration of infrared channels of FY-2/VISSR using high-spectral resolution sensors IASI and AIRS [J]. Journal of Remote Sensing, 2012, 16(5): 939-952. (in Chinese) [4] Qi Chengli, Gu Mingjian, Hu Xiuqing, et al. FY-3 satellite infrared high spectral sounding technique and potential application [J]. Advances in Meteorological Science and Technology, 2016, 6(1): 88-93. (in Chinese) [5] Wu Chunqiang, Qi Chengli, Hu Xiuqing, et al. FY-3D HIRAS radiometric calibration and accuracy assessment [J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(6): 3965-3976. doi: 10.1109/TGRS.2019.2959830 [6] Wang Likun, Chen Yong. Inter-comparing SNPP and NOAA-20 CrIS toward measurement consistency and climate data records [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2019, 12(7): 2024-2031. doi: 10.1109/JSTARS.2019.2891701 [7] Goldberg M, Ohring G, Butler J, et al. The global space-based inter-calibration system [J]. Bulletin of the American Meteorological Society, 2011, 92(4): 467-475. doi: 10.1175/2010BAMS2967.1 [8] Hewison T, Wu Xiangqian, Yu Fangfang, et al. GSICS inter-calibration of infrared channels of geostationary imagers using Metop/IASI [J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1160-1170. doi: 10.1109/TGRS.2013.2238544 [9] Hu Xiuqing, Xu Na, Weng Fuzhong, et al. Long-term monitoring and correction of FY-2 infrared channel calibration using AIRS and IASI [J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(10): 5008-5018. doi: 10.1109/TGRS.2013.2275871 [10] Wang Likun, Goldberg M, Wu Xiangqian, et al. Consistency assessment of atmospheric infrared sounder and infrared atmospheric sounding interferometer radiances: Double differences versus simultaneous nadir overpasses [J]. Journal of Geophysical Research Atmospheres, 2011, 116(11): 014988. [11] Cao Changyong, Weinreb M, Xu Hui. Predicting simultaneous nadir overpasses among polar-orbiting meteorological satellites for the intersatellite calibration of radiometers [J]. Journal of Atmospheric and Oceanic Technology, 2004, 21(4): 537-542. doi: 10.1175/1520-0426(2004)021<0537:PSNOAP>2.0.CO;2 [12] Gao Shuai, Li Yuan, Bai Tingzhu, et al. Uncertainty analysis in cross-calibration and optimization calculation of calibration coefficients [J]. Chinese Optics, 2020, 13(3): 568-576. (in Chinese) [13] Zhao Weining, Hu Xiuqing, Fang Wei, et al. Development and applications of intercalibration for satellite optical instruments [J]. Optics and Precision Engineering, 2015, 23(7): 1921-1931. (in Chinese) doi: 10.3788/OPE.20152307.1921 [14] Lukashin C, Wielicki B, Young D, et al. Uncertainty estimates for imager reference inter-calibration with CLARREO reflected solar spectrometer [J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1425-1436. doi: 10.1109/TGRS.2012.2233480 [15] Hewison T. An evaluation of the uncertainty of the GSICS SEVIRI-IASI intercalibration products [J]. IEEE Transactions on Geoscience and Remote Sensing, 2013, 51(3): 1171-1181. doi: 10.1109/TGRS.2012.2236330 [16] Jouglet D, Chinaud J, Lenot X. Radiometric inter-comparison of IASI: IASI-A/IASI-B, IASI/AIRS, IASI/CrIS [C]//The 2014 EUMETSAT Meteorological Satellite Conference, 2014. [17] Wang Likun, Han Yong, Jin Xin, et al. Radiometric consistency assessment of hyperspectral infrared sounders [J]. Atmospheric Measurement Techniques, 2015, 8(11): 4831-4844. doi: 10.5194/amt-8-4831-2015 [18] Yang Tianhang, Hu Xiuqing, Xu Hanlie, et al. Radiation calibration accuracy assessment of FY-3D Hyperspectral Infrared Atmospheric Sounder based on inter-comparison [J]. Acta Optica Sinica, 2019, 39(11): 1130003. (in Chinese) [19] Xu Na, Hu Xiuqing, Chen Lin, et al. On-orbit radiometric calibration accuracy of FY-3A MERSI thermal infrared channel [J]. Spectroscopy and Spectral Analysis, 2014, 34(12): 3429-3434. (in Chinese) [20] Zhang Peng, Yang Lei, Gu Songyan, et al. Meteorological requirements for the early-morning-orbit satellite [J]. Advances in Meteorological Science and Technology, 2015, 5(2): 6-12. (in Chinese) [21] Qi Chengli, Wu Chunqiang, Hu Xiuqing, et al. High spectral infrared atmospheric sounder (HIRAS): System overview and on-orbit performance assessment [J]. IEEE Transactions on Geoscience and Remote Sensing, 2020, 58(6): 4335-4352. doi: 10.1109/TGRS.2019.2963085 [22] Yang Tianhang, Gu Mingjian, Shao Chunyuan, et al. Nonlinearity correction of FY-3E HIRAS-II in pre-launch thermal vacuum calibration tests [J]. Journal of Infrared and Millimeter Waves, 2022, 41(3): 597-607. (in Chinese) [23] Yan Lin, Hu Yonghong, Zhang Yong, et al. Radiometric calibration evaluation for FY3D MERSI-II thermal infrared channels at Lake Qinghai [J]. Remote Sensing, 2021, 13(3): 466. doi: 10.3390/rs13030466 [24] Saunders R, Hocking J, Turner E. An update on the RTTOV fast radiative transfer model (currently at version 12) [J]. Geoscientific Model Development, 2018, 11(7): 2717-2737. doi: 10.5194/gmd-11-2717-2018 [25] Wang Likun, Tremblay D, Han Yong, et al. Geolocation assessment for CrIS sensor data records [J]. Journal of Geophysical Research: Atmospheres, 2013, 118(22): 12690-12704. doi: 10.1002/2013JD020376 [26] Wang Likun, Tremblay D, Zhang Bin, et al. Fast and accurate collocation of the visible infrared imaging radiometer suite measurements with cross-track infrared sounder [J]. Remote Sensing, 2016, 8(1): 76. doi: 10.3390/rs8010076 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 132
- HTML全文浏览量: 24
- PDF下载量: 58
- 被引次数: 0









































































