







-
重力场作为地球的基本物理场之一,反映了地下物质分布以及随时空变化的情况,在资源勘探、军事应用以及空间科学研究等方面具有重要的价值[1-2]。据计算分析表明,对于射程为10 000 km的战略导弹,由地球重力异常引起的导弹落地点偏差可达2~3 km[3],可见构建地球重力场精细结构分布图具有重要的战略意义。目前地球重力场的测量方式有航空重力测量、海洋重力测量、卫星重力测量以及地面重力测量等,为了构建地球重力场分布图,通常采用多种测量方式结合。地面重力测量作为重力场测量的重要方式,主要用于地球重力场局部精细化构建,其可以分为地面静态重力测量和地面动态重力测量[4]。由于地面静态测量成本高、效率低,所以地面重力测量通常采取地面动态重力测量的方式,即地面车载重力测量。
近年来,车载重力测量快速发展,通常采用SINS与GNSS组合的实现方式。其中,参考文献[5-7]中分别采用基于SINS/GNSS组合原理的一体化重力仪进行了地面车载重力测量实验,其采用的重力仪为航空重力仪,地面车载重力测量实验中选取的测量环境也较为理想,并未考虑由于地面障碍物对GNSS信号遮挡导致测量精度下降的情况,无法实现GNSS拒止情况下的高精度车载重力测量。为了提高地面车载重力测量系统在特殊测量环境下的有效性,参考文献[8]采用基于SINS/里程计/高度计组合原理的车载重力测量方案,但是由于里程计精度易受车胎磨损、打滑等影响,最终导致重力测量精度下降。参考文献[9]采用SINS/测速仪(Velocimeter,VEL)组合的方式进行了地面车载重力测量,但是其采用的是一维测速仪,无法精确测量高程信息,直接制约了重力测量精度。
为了提高地面车载重力测量的自主性,同时又保证测量精度,文中提出了基于SINS/二维LDV的重力测量方案,该方案有效弥补了SINS/GNSS组合重力测量对高品质卫导信号的依赖,通过二维测速仪高精度的高程输出,有效提高了SINS/LDV组合重力测量的精度[10-11]。文中对测量原理、误差模型以及数据处理流程进行了分析,并通过车载重力测量实验对该组合方式的系统精度进行了验证。
-
车载重力测量采取的是相对重力测量的方式,属于动基座重力测量的一种,其中动基座重力测量的计算公式如下:
$$ \delta {{{g}}^n}{\text{ = }}{{\dot v}}_{}^n - {{C}}_b^n{{{f}}^b} + \left( {2{{\omega }}_{ie}^n + {{\omega }}_{en}^n} \right) \times {{v}}_{}^n - {{{\gamma }}^n} $$ (1) 式中:$ \delta {{{g}}^n} $为重力扰动矢量;$ \dot{ { v}}^{n} $为载体加速度;$ v^{n} $为载体速度;$ {{{f}}^b} $为加速度计的比力测量值;$ {C}_{b}^{n} $为载体坐标系(b系)和导航坐标系(n系)之间的方向余弦矩阵;${{ \omega}}_{i e}^{n} $为地球自转角速度在n系下的投影;$ {{\omega}}_{e n}^{n} $为导航坐标系相对于地球坐标系(e系)的转速在n系下的投影;${{ \gamma}}^{n} $为正常重力值。
在基于SINS/LDV组合系统的重力测量中,公式(1)中的参数分别由SINS和LDV测得:一类由SINS测得,如b系下的比力$ {{{f}}^b} $和方向余弦矩阵$ {C}_{b}^{n} $;另一类由LDV和SINS共同测得,如载体速度$ v^{n} $、加速度$ \dot{{v}}^{n} $、正常重力值$ {{{\gamma }}^n} = {[0{\text{ 0 }}\gamma {\text{]}}^{{\rm{T}}} } $以及科里奥利加速度$ \left( {2{{\omega }}_{ie}^n + {{\omega }}_{en}^n} \right) \times {{v}}_{}^n $。
文中,对于SINS/LDV组合车载重力测量方法的初步研究中只讨论重力标量测量,即重力异常,也即公式(1)中的天向分量:
$$ \begin{gathered} \delta {g_U} = {{\dot v}_U} - {f_U} - \left( {\frac{{{v_E}}}{{{R_N} + h}} + 2{\omega _{ie}}{\rm{cos}}L} \right) \cdot {v_E} {\text{ }} - \frac{{v_N^2}}{{{R_M} + h}} - \gamma \\ \end{gathered} $$ (2) 式中:${\dot v_U}$为载体天向加速度;$ {f_U} $为等效天向加速度计测量值;$ {v_E} $、$ {v_N} $为载体东向和北向速度;$ {\omega _{ie}} $为地球自转角速度;L、h分别为载体所在位置的纬度和高度;RM、RN分别为载体所在位置的子午圈半径和卯酉圈半径。
-
由于二维激光多普勒测速仪提供的是载体对地速度,因此SINS/LDV组合重力测量的误差模型与传统的SINS/GNSS组合方式存在一定的差异,其多项误差源于SINS姿态误差与LDV速度误差的耦合。SINS/LDV组合重力测量误差模型为:
$$ \begin{split} {\rm{d}}\delta {{{g}}^n} =& {{C}}_b^n\delta {{{{\dot v}}}^b} - \left[ {{{{f}}^n} \times } \right]\phi - {{C}}_b^n\delta {{{f}}^b} + \\& {\text{ }}\left( {2{{\omega }}_{ie}^n + {{\omega }}_{en}^n} \right) \times \left( {{{C}}_b^n\delta {{{v}}^b} + \left[ {{{{v}}^n} \times } \right]{{\phi}} } \right) -\\& {\text{ }} \left[ {{{{v}}^n} \times } \right]\left( {2\delta {{\omega }}_{ie}^n + \delta {{\omega }}_{en}^n} \right) - \delta {{{\gamma }}^n} \end{split}$$ (3) 式中:$ {\rm{d}}\delta {{{g}}^n} $为重力测量误差;$ \delta {{{\dot v}}^b} $为加速度计算误差在b系下的投影;${{ \phi }}$为惯导的姿态误差;$\delta {{{f}}^b} $为比力测量误差;$ \delta {{{v}}^b} $为测速仪速度误差在b系下的投影;$ {{{v}}^n} $为理想情况下测速仪速度在n系中的投影;$ \delta {{\omega }}_{ie}^n $为地球自转角速度计算误差;$ \delta {{\omega }}_{en}^n $为n系相对e系的转速计算误差。
由公式(3)可以看出,SINS/LDV组合重力测量的误差主要来源于两个方面:(1) 与惯导系统相关的比力测量误差$ \delta {{{f}}^b} $和姿态计算误差$ {{\phi}} $;(2) 与测速仪相关的速度测量误差$ \delta {{{{v}}}^b} $、加速度计算误差$ \delta {{\dot {{v}}}^b} $以及位置计算误差。
同样,在进行系统误差模型分析时也只考虑天向分量。为了使重力标量测量精度优于1 mGal,需要分别对SINS、LDV以及测量方案进行约束,其中参考文献[12]对SINS/GNSS组合重力测量方案中的SINS进行了分析与约束,由于SINS在SINS/GNSS和SINS/LDV组合方案中的作用相同,因此参考文献[12]中对SINS的约束也适用于SINS/LDV组合方案。通过对天向误差模型进行解耦和分析,根据车载重力测量的实际速度情况,假设载体速度为20 m/s时,对LDV和测量方案进行如表1所示的约束。
表 1 系统指标
Table 1. System index
Index Accuracy Velocity measurement accuracy of LDV ≤1‰ Calculation accuracy of acceleration/mGal ≤1 Measurement time of single line/h ≤1.7 Horizontal accuracy/m ≤10 Height accuracy/m ≤3 其中,100 m的水平定位误差引起的重力测量误差约0.07 mGal,因此其对重力测量的影响可以忽略,但是为了提高系统的可靠性,表1中对水平定位精度进行了10 m的约束,可以适当放宽约束。
-
单一的惯导系统误差随着时间累计,难以满足长时间的高精度导航和重力测量需求,激光多普勒测速仪具有精度高、实时性好等优点,可以通过测速仪提高惯导系统精度,进一步地,高精度的惯导姿态又可以提高测速仪在n系下的投影。为了实现测速仪与惯导系统的信息融合,通常采用卡尔曼滤波技术[13-14]。首先需要构建15维状态空间模型,构建状态方程如下:
$$ {{\dot X}}(t) = {{F}}(t){{X}}(t) + {{G}}(t){{W}}(t) $$ (4) 式中:$ {{F}}(t) $为系统状态转移矩阵;$ {{G}}(t) $为系统噪声转移矩阵;$ {{W}}(t) $为系统噪声矩阵;$ {{X}}(t) = {[ {\begin{array}{*{20}{c}} \phi & {\delta {{v}}}& {\delta {{p}}}& {{\varepsilon }}& \nabla \end{array}} ]^{\text{T}}} $为状态量,其中$ \phi $为姿态误差,$ \delta {{v}} $为速度误差,$ \delta {{p}} $为位置误差,$ {{\varepsilon }} $为陀螺漂移,$ \nabla $为加速度计零偏。
构建量测方程如下:
$$ {{Z}}(t) = {{H}}(t){{X}}(t) + {{V}}(t) $$ (5) 式中:$ {{V}}(t) $为量测噪声矩阵。以测速仪在n系下的投影为基准,将惯导系统速度误差作为量测量:
$$ {{Z}}(t) = \left[ {{{v}}_{{\text{SINS}}}^n - {{v}}_{{\text{LDV}}}^n} \right] $$ (6) 式中:$ {{v}}_{{\text{SINS}}}^n $为惯导系统速度;$ {{v}}_{{\text{LDV}}}^n $为测速仪速度。
量测矩阵:
$$ {{H}}(t) = \left[ {\begin{array}{*{20}{c}} {{{{0}}_{3 \times 3}}}&{{{{I}}_{3 \times 3}}}&{{{{0}}_{3 \times 9}}} \end{array}} \right] $$ (7) 为了抑制高度通道的发散,提高滤波器收敛速度,每次滤波结束之后需要将误差进行反馈补偿,补偿方式如下:
$$ \begin{gathered} {{C}}_b^n = \left( {{{I}} + \left( {\phi \times } \right)} \right){{\hat {{C}}}}_b^n \\ {{{v}}^n} = {{{{\hat {{v}}}}}^n} - \delta {{{v}}^n} \\ {{{p}}^n} = {{{{\hat {{p}}}}}^n} - \delta {{{p}}^n} \\ \end{gathered} $$ (8) 式中:$ {{\hat {{C}}}}_b^n $和$ {{C}}_b^n $分别为理想姿态矩阵和实际姿态矩阵;$ {{{\hat {{v}}}}^n} $和$ {{{v}}^n} $分别为理想速度和实际速度;$ {{{\hat {{p}}}}^n} $和$ {{{p}}^n} $分别为理想位置和实际位置。
-
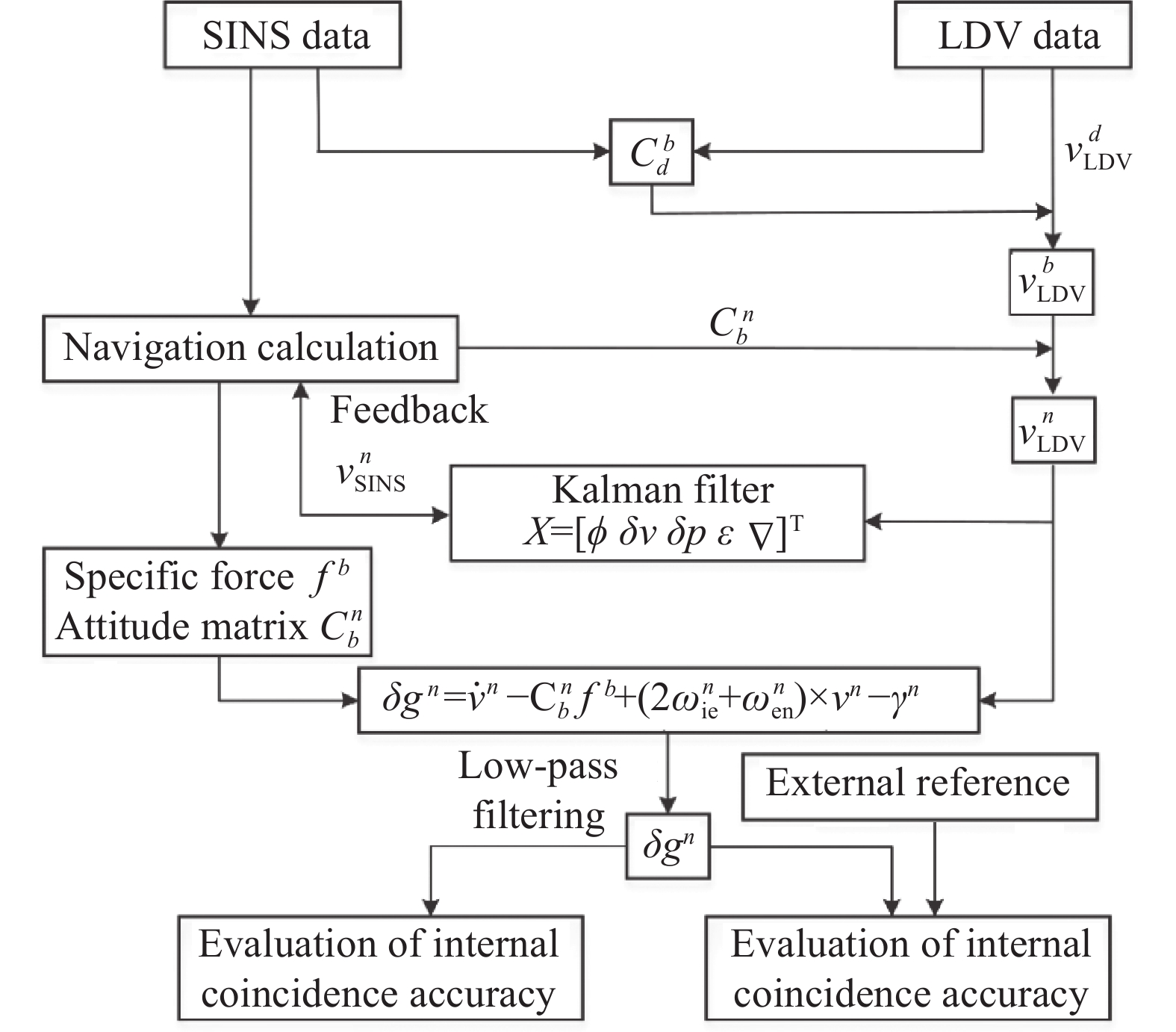
SINS/LDV组合车载重力测量系统采用的传感器包括捷联惯导系统和激光多普勒测速仪,因此系统原始数据包括惯导输出的惯性测量单元角增量、速度增量和测速仪输出的载体对地速度。重力测量系统的处理流程包含测速仪标定、惯导/测速仪组合导航以及重力异常计算与精度评估,具体如图1所示。

图 1 数据处理步骤
Figure 1. Data processing procedure
数据处理步骤如下:
(a) 由于测速仪输出$ {{v}}_{{\text{LDV}}}^d $为测速仪坐标系(d系)下的速度,通过标定测速仪安装误差矩阵$ {{C}}_d^b $可以计算出测速仪速度在b系下的投影$ {{v}}_{{\text{LDV}}}^b $;
(b) 根据惯导系统提供的载体实时姿态矩阵$ {{C}}_b^n $,将测速仪速度$ {{v}}_{{\text{LDV}}}^b $进一步投影至n下得到$ {{v}}_{{\text{LDV}}}^n $;
(c) 为了抑制惯导系统误差的发散,通过卡尔曼滤波技术对误差不断反馈修正,滤波器设计见1.3节;
(d) 将惯导系统提供的比力$ {{{f}}^b} $、姿态矩阵$ {{C}}_b^n $以及测速仪提供的速度$ {{v}}_{{\text{LDV}}}^n $、航位推算得到的位置$ {{{p}}^n} $以及一次差分的加速度$ {{\dot v}}_{{\text{LDV}}}^n $代入重力异常计算公式进行计算,得到包含高频噪声的重力异常值;
(e) 通过基于窗函数的FIR低通滤波器对重力异常值进行滤波,进一步得到低频重力异常信息,最后进行内外符合精度评估。
-
为了验证SINS/LDV组合重力测量系统的性能,选择位于湖南省长沙市的黑麋峰进行了单条测线的重复重力测量实验。实验设备选择笔者单位自研的捷联惯导系统和二维激光多普勒测速仪,其数据输出频率均为100 Hz。惯导系统内部的激光陀螺精度优于0.003 (°)/h,加速度计精度优于20 μg,测速仪测速精度优于1‰。实验车同时搭载GPS,以SINS/GPS组合车载重力测量的结果作为对比,其中GPS的单点水平定位精度为1.5 m,差分水平定位精度为0.4 m。实验设备安装如图2所示,惯导系统安装在实验车内部,为了减小杆臂误差,测速仪安装在惯导系统正下方的车底,GPS天线置于车顶。

图 2 实验设备安装示意图
Figure 2. Installation diagram of experimental equipment
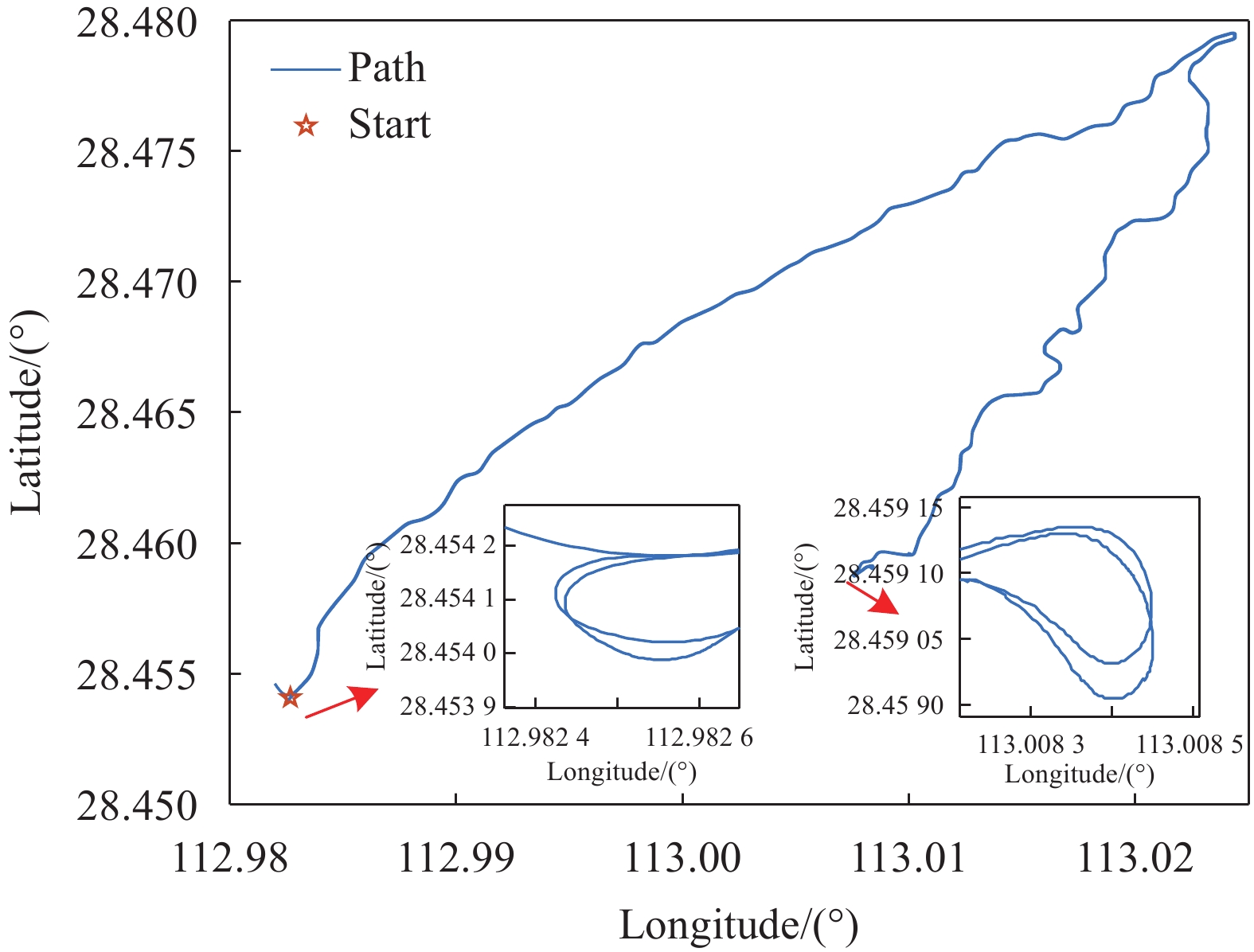
实验轨迹和实验过程中的高度变化如图3~4所示,实验共六条重复测线,单条测线长约11 km,最大海拔变化约332.7 m。

图 3 实验轨迹
Figure 3. Experimental track

图 4 实验过程高度变化
Figure 4. The height varies during the experiment
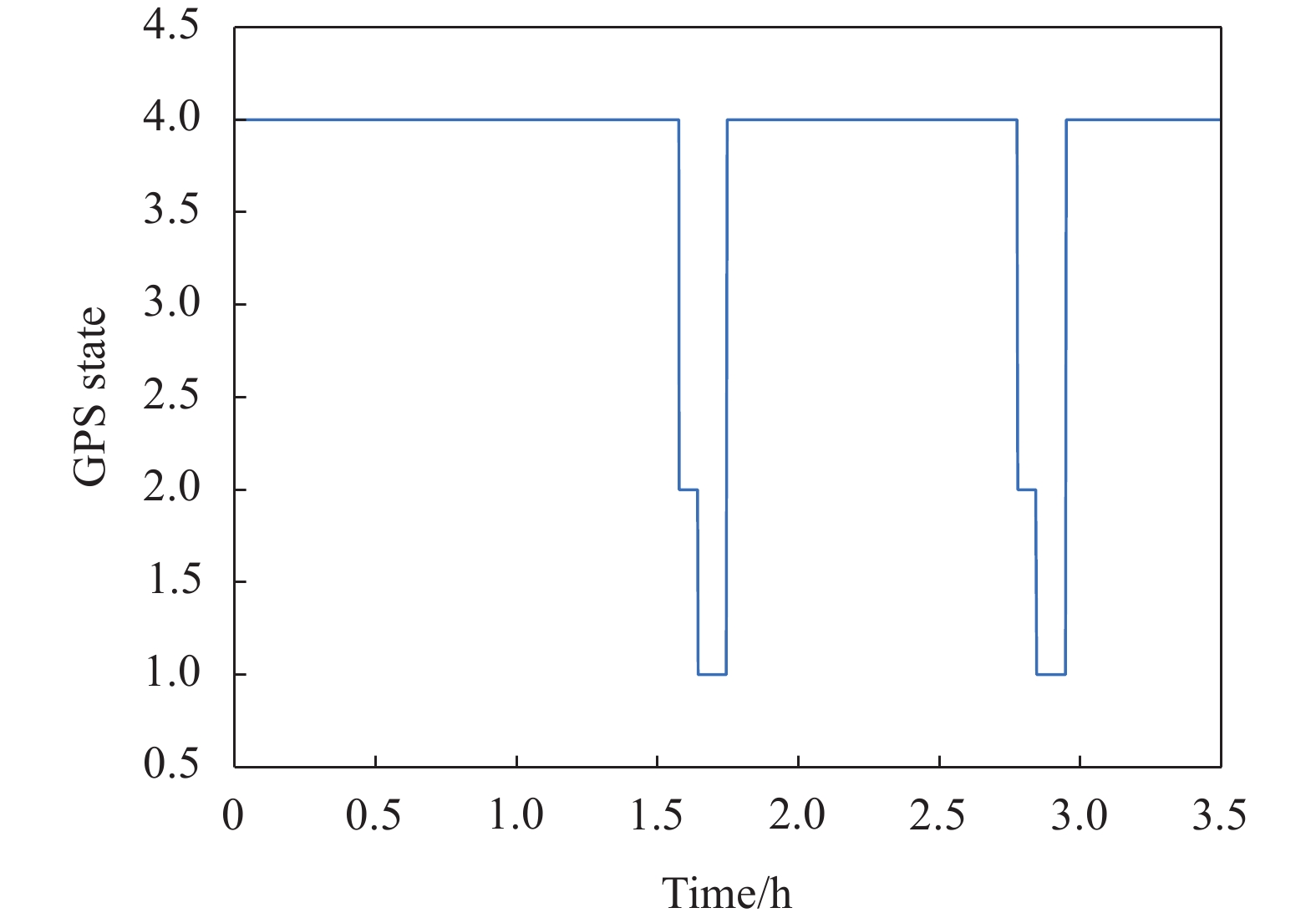
在黑麋峰实验环境下,实验车姿态变化较为剧烈且GPS信号受遮挡严重,实验过程中的GPS工作状态、测速仪品质因子以及测速仪输出分别如图5~7所示。
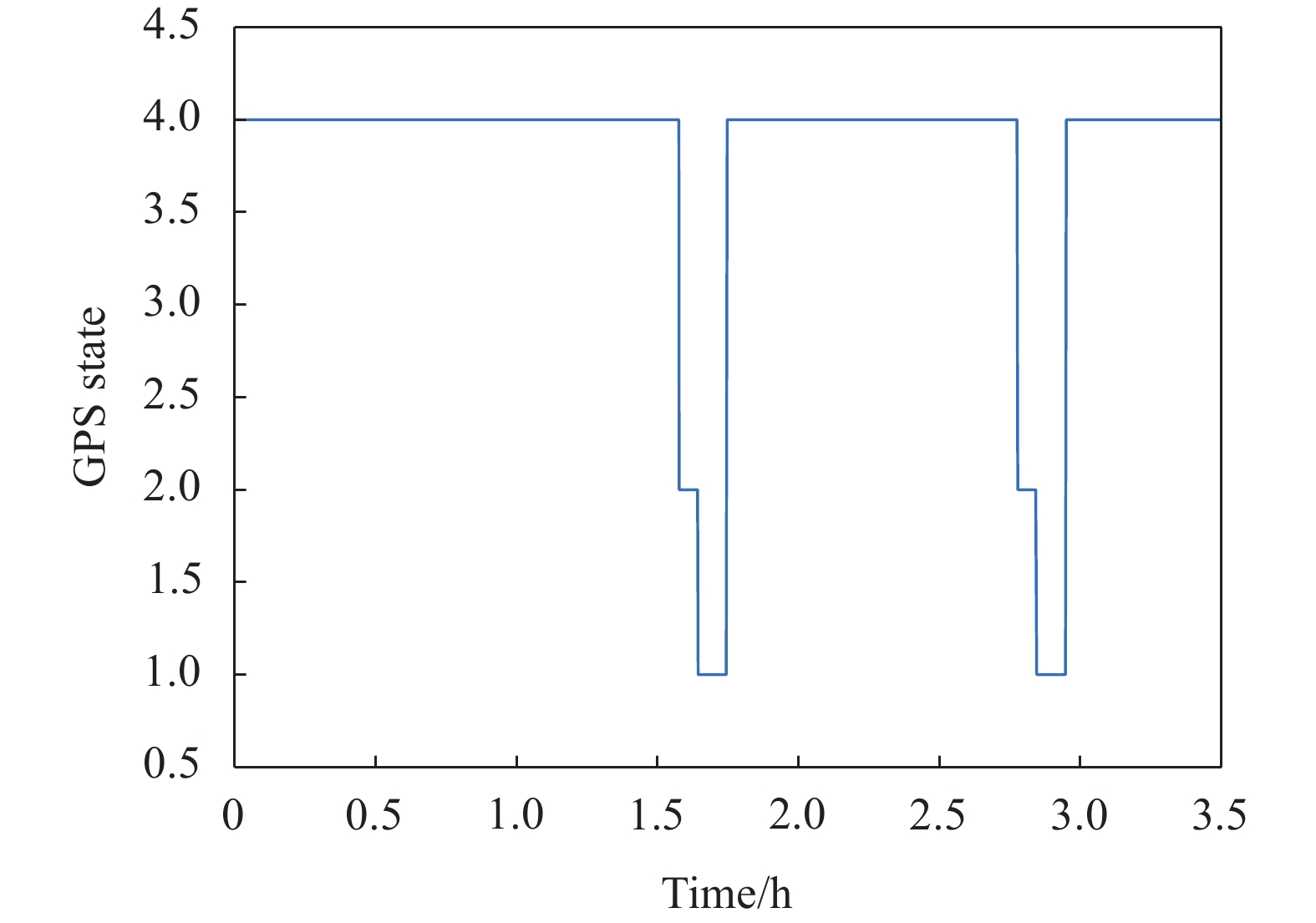
图 5 GPS工作状态
Figure 5. GPS working state
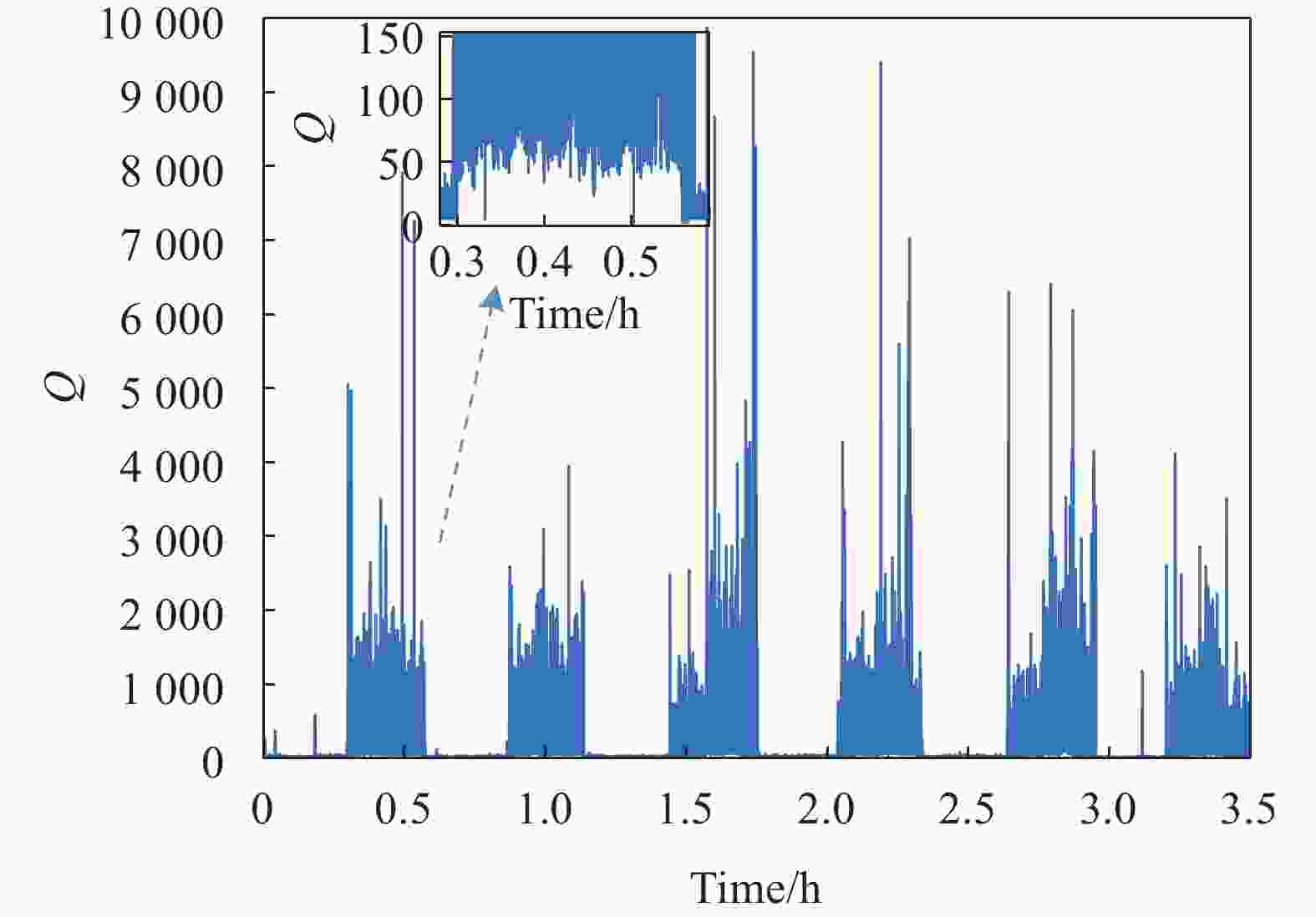
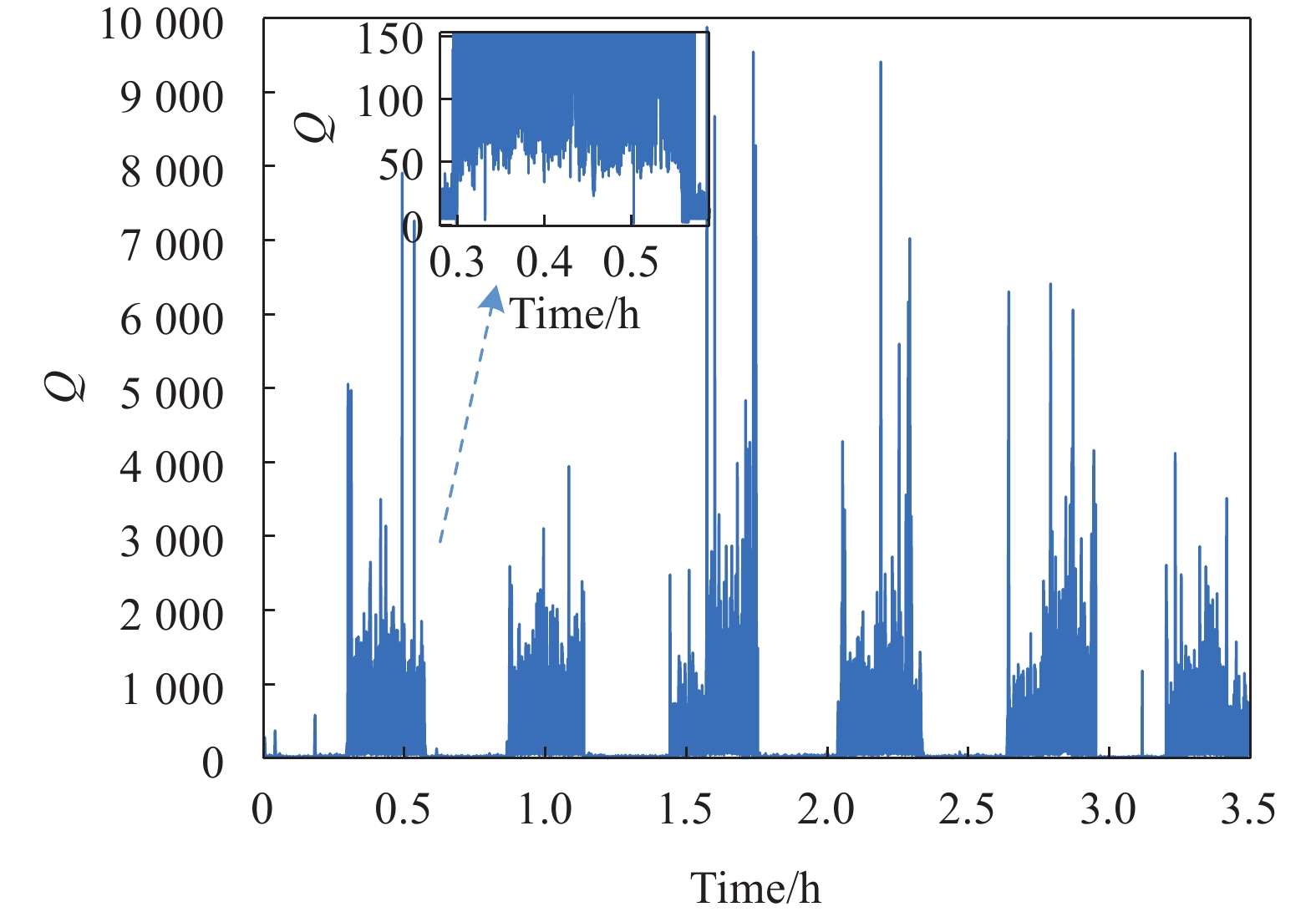
图 6 测速仪品质因子
Figure 6. Velocimeter quality factor
GPS工作时采用GPGGA的数据输出格式,工作状态为1表示单点定位、2表示码差分以及4表示固定解,其中工作状态为4时定位精度最高。通过图5可以发现,GPS工作期间部分时间段下定位精度明显下降,由位置一次差分的速度和二次差分的加速度精度也会随之下降。
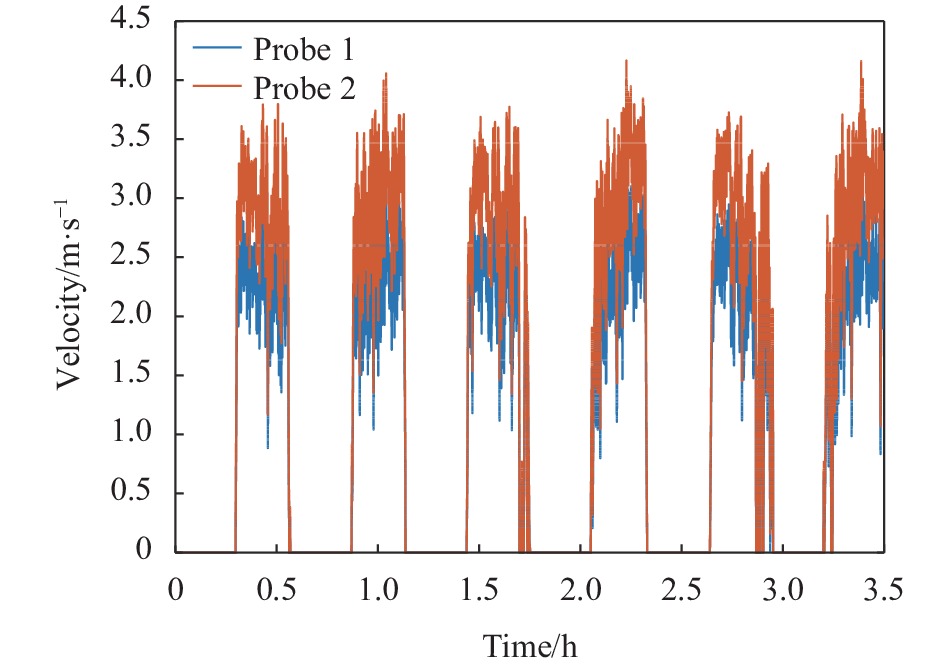
测速仪品质因子反映了测速仪测量的可靠性,当品质因子高于100时,数据输出稳定可靠。由图6可以看出,在实验车移动过程中,测速仪的品质因子普遍高于100,说明实验过程中测速仪比较稳定。进一步地,图7反映了实验过程中二维测速仪两个探头的对地速度,可以看出实验过程中测速仪探头输出稳定变化,受测量环境影响较小。
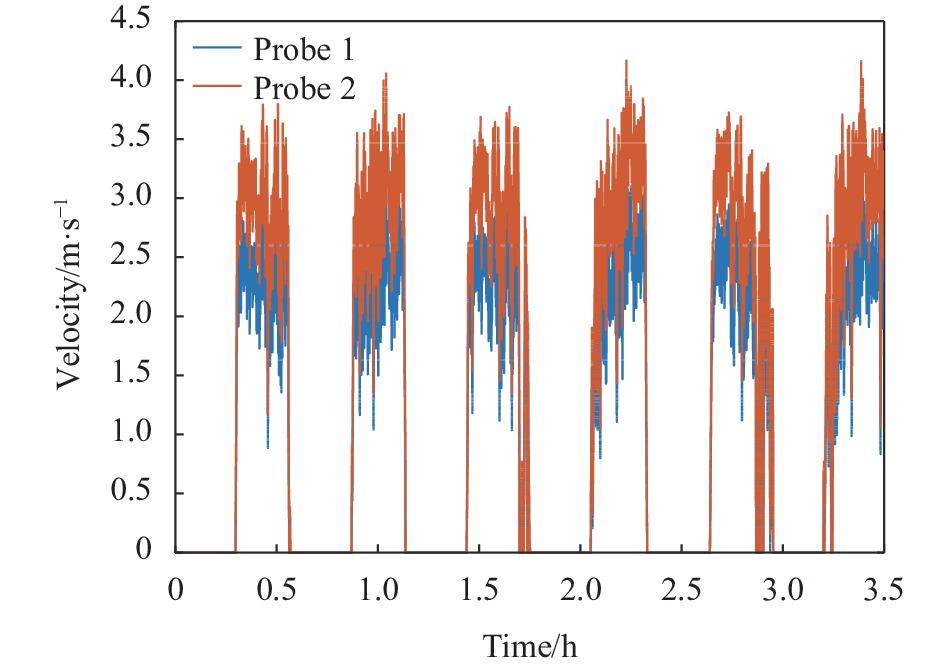
图 7 测速仪输出
Figure 7. The output of the velocimeter
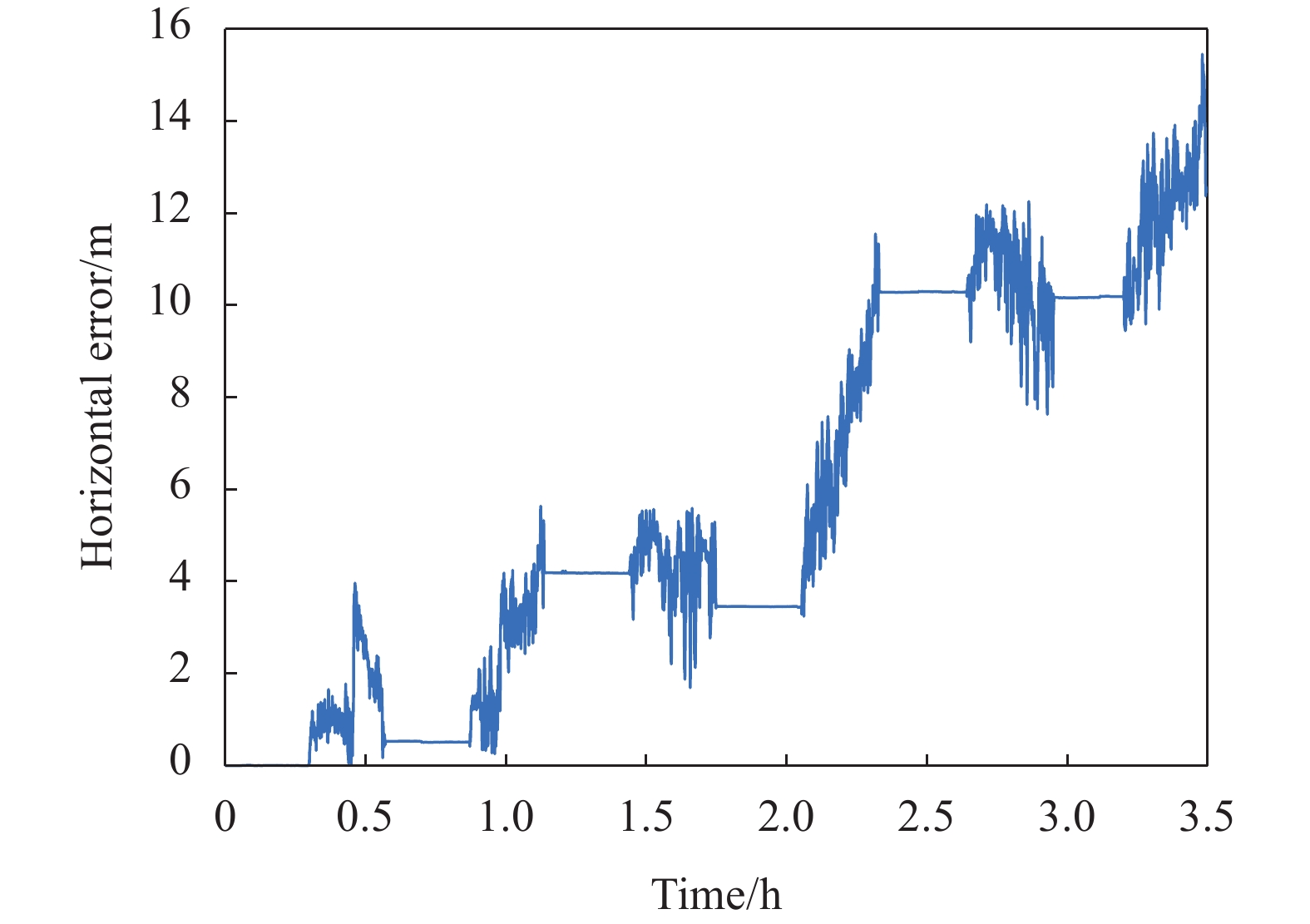
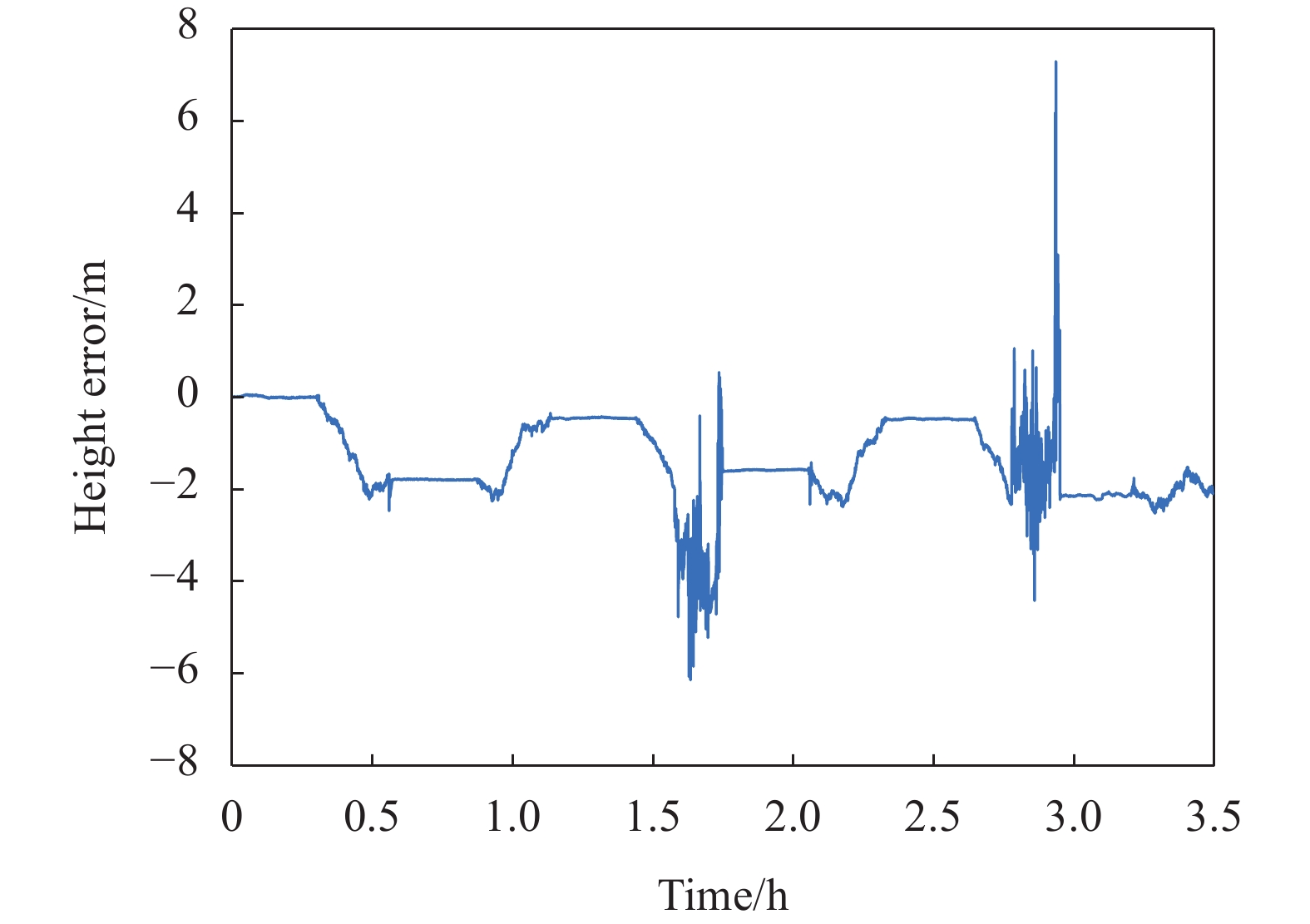
SINS/LDV组合导航结果如图8~9所示。可以看出,SINS/LDV组合重力测量系统的水平误差和高度误差最大分别为约17 m和2 m,其中高度误差满足表1中的系统指标,而水平误差超过了系统指标,其对重力测量的影响不大,因此认为水平误差在可接受范围内。
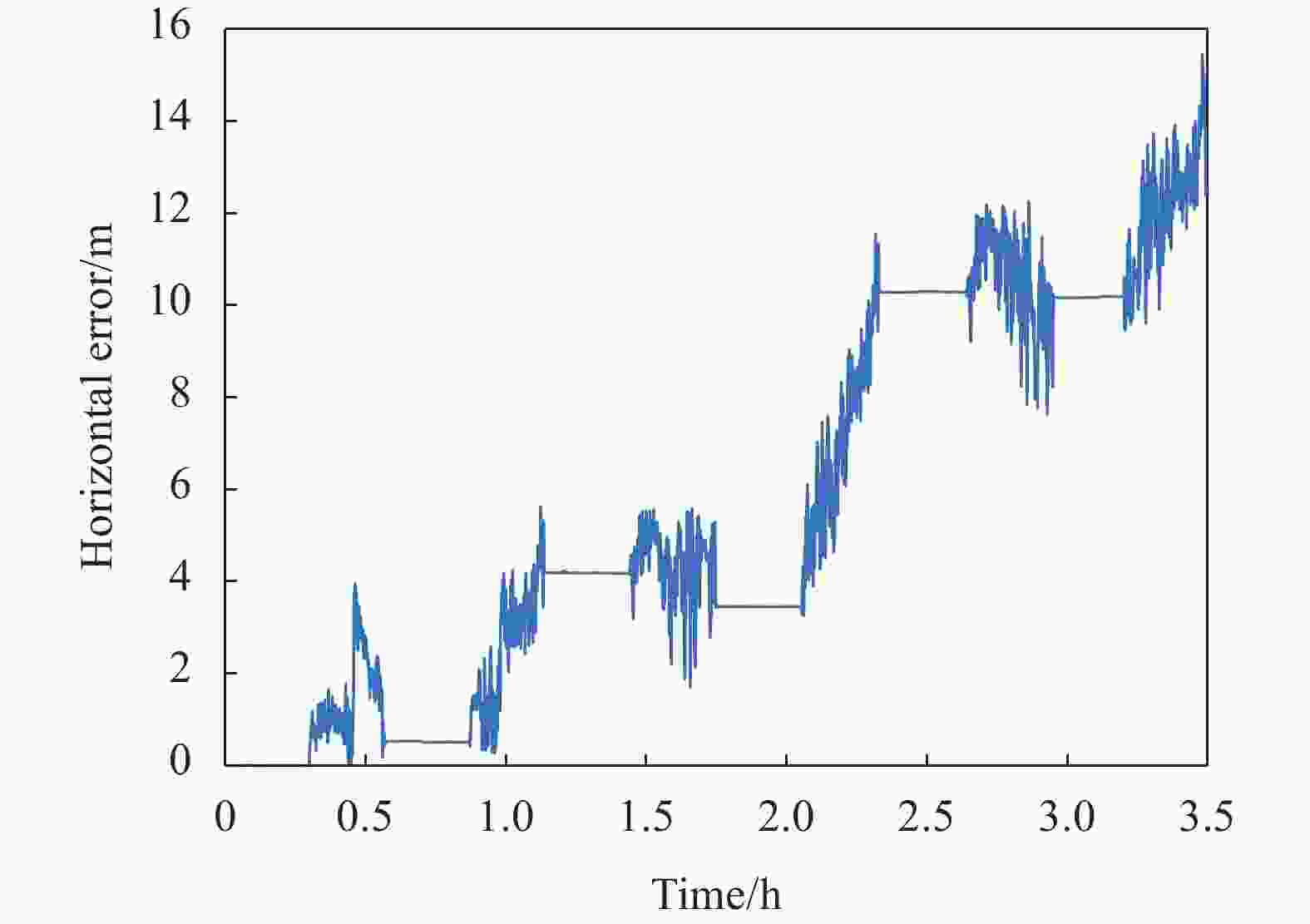
图 8 水平误差
Figure 8. Horizontal error
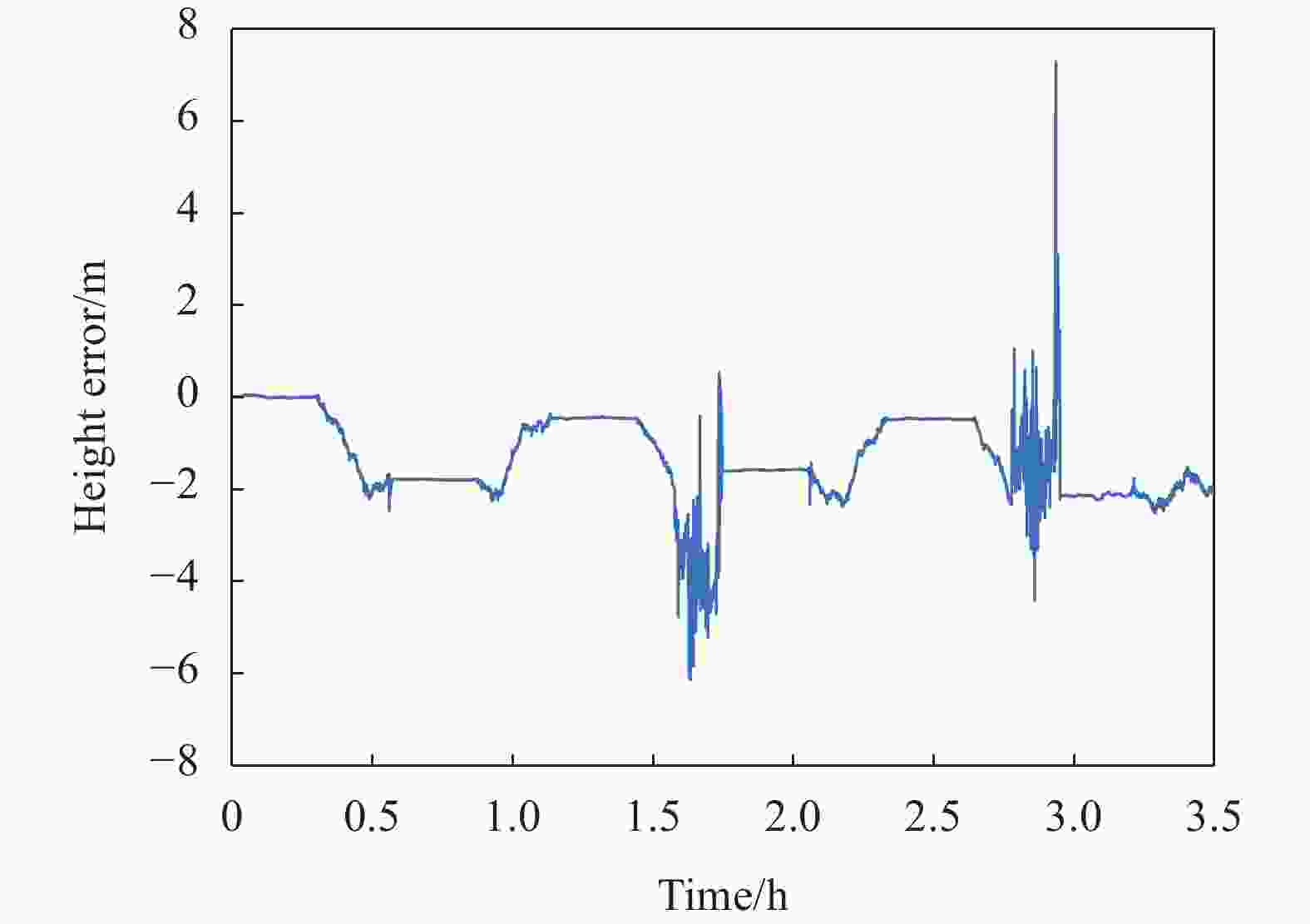
图 9 高度误差
Figure 9. Height error
对比基于SINS/GNSS、SINS/LDV组合系统的重力异常计算,结果如图10~11所示。

图 10 SINS/LDV组合重力异常测量结果
Figure 10. Gravity anomaly measurement results of the integration of SINS/LDV

图 11 SINS/GNSS组合重力异常测量结果
Figure 11. Gravity anomaly measurement results of the integration of SINS/GNSS
由图10可以看出,基于SINS/LDV组合系统的六条测线一致性较好,由于黑麋峰实验环境海拔变化较大,重力异常变化也相对较大,符合预期。另外,如图11所示,由于卫星信号受遮挡的原因,SINS/GNSS组合系统的六条测线一致性相对较差,但是其重力异常变化范围仍与SINS/LDV组合系统一致。
此次实验中,由于没有建立外部基准点,只进行系统的内符合精度评估,其目的是验证系统的重复性和稳定性。两套系统的内符合精度评估结果如表2和表3所示。
表 2 SINS/LDV组合重力测量系统内符合精度
Table 2. Internal coincidence accuracy of SINS/LDV integrated gravimetry system
Maximum Minimum RMS of
single lineRMS of
total lineInternal
coincidence
accuracy/
mGalLine 1 1.08 −1.46 0.73 0.70 Line 2 0.98 −1.00 0.47 Line 3 1.18 −2.47 0.66 Line 4 2.37 −1.78 1.05 Line 5 0.83 −1.24 0.53 Line 6 1.26 −1.04 0.59 表 3 SINS/GNSS组合重力测量系统内符合精度
Table 3. Internal coincidence accuracy of SINS/GNSS integrated gravimetry system
Maximum Minimum RMS of
single lineRMS of
total lineInternal
coincidence
accuracy/
mGalLine 1 2.22 −1.57 1.03 1.53 Line 2 1.82 −3.05 1.30 Line 3 3.36 −2.92 1.75 Line 4 1.38 −2.77 1.02 Line 5 2.58 −4.73 2.46 Line 6 1.62 −2.59 1.05 由表2~3可以看出,SINS/LDV组合系统的单条测线内符合最大值为1.05 mGal,最小值为0.47 mGal,总的内符合精度为0.70 mGal;SINS/GNSS组合系统的单条测线内符合精度最大值为2.46 mGal,最小值为1.02 mGal,总的内符合精度为1.53 mGal。通过实验结果可知,在GNSS信号部分拒止的情况下,基于SINS/LDV组合重力测量系统的六条测线的内符合精度普遍优于基于SINS/GNSS组合系统的测线精度,并且其总内符合精度也相比SINS/GNSS组合系统提高了约54%,充分验证了SINS/二维LDV组合重力测量方案的有效性。
-
文中对基于二维激光多普勒测速仪的捷联式车载自主重力测量方法进行了研究。通过对系统的测量原理和误差模型进行分析,给出了系统相应的指标要求和数据处理流程。车载重力测量实验表明,在GNSS信号部分拒止的情况下,基于SINS/LDV组合重力测量系统的单条测线内符合精度普遍优于SINS/GNSS组合系统,且总的内符合精度也高于SINS/GNSS组合系统。实验结果说明了SINS/二维LDV组合重力测量系统在GNSS信号拒止情况的有效性。文中的相关研究可以为丛林密集和山洞等地区的地质勘探、重力匹配以及地球局部重力场精细化等领域提供技术支撑。
Strapdown vehicle autonomous gravimetry method based on two-dimensional laser Doppler velocimeter
-
摘要: 传统的车载重力测量通常采用捷联惯导系统(Strapdown Inertial Navigation System, SINS)/全球导航卫星定位系统(Global Navigation Satellite System, GNSS)组合的方式,但是在如山谷、隧道以及高楼林立等特殊环境下,GNSS信号会受到遮挡,导致重力测量系统精度下降。针对特殊环境下传统车载重力测量方法精度下降的问题,提出了一种基于捷联惯导系统/二维激光多普勒测速仪(Laser Doppler Velocimeter, LDV)组合的车载重力测量方式,分析了系统重力测量原理和误差模型,设计了滤波器方案,通过车载重力测量实验对系统精度进行了验证。实验针对丛林遮蔽的山地环境下完成了六条重复测线重力测量,同时比对SINS/GNSS组合重力测量系统的测量精度,其中SINS/GNSS组合系统的单条测线内符合精度最大为2.46 mGal,最小为1.03 mGal,总内符合精度为1.53 mGal;SINS/LDV组合系统的单条测线内符合精度最大为1.05 mGal,最小为0.47 mGal,总内符合精度为0.70 mGal,其总内符合精度相比于SINS/GNSS组合系统提高了约53%。车载重力测量实验证明了SINS/LDV组合重力测量系统在卫星信号拒止环境下的有效性。
-
关键词:
- 车载重力测量 /
- 二维激光多普勒测速仪 /
- 捷联惯导系统 /
- 组合导航 /
- 内符合精度
Abstract:Objective As one of the basic physical fields of the earth, gravity field reflects the distribution of underground materials and the changes of space and time. It has important value in resource exploration, military application and space science research. At present, the measurement methods of earth gravity field include aerial gravimetry, marine gravimetry, satellite gravimetry and ground gravimetry, et al. As an important method of gravity field measurement, ground gravimetry is mainly used for local fine construction of earth gravity field, which can be divided into ground static gravimetry and ground dynamic gravimetry. Due to the high cost and low efficiency of ground static gravimetry, ground dynamic gravimetry is usually adopted, namely ground vehicle gravimetry. At present, strapdown inertial navigation system (SINS)/global navigation satellite system (GNSS) integrated system is usually used in vehicle gravimetry, which lacks autonomy and has limited accuracy in the special environment where GNSS signal is blocked. To solve this problem, this paper proposes a strapdown vehicle autonomous gravimetry method based on two-dimensional laser Doppler velocimeter (LDV). Methods In this paper, a high-precision autonomous vehicle gravimetry method is designed. In order to improve the autonomy of the system, SINS/LDV integrated system is adopted in this paper, which does not need to rely on external signal sources. In order to ensure the measurement accuracy of the system, the LDV adopted by the system is two-dimensional, which is sensitive to the velocity of the vertical direction, so as to reduce the measurement error. The systematic errors are analyzed, and the constraints on the device accuracy and measurement scheme of LDV are proposed (Tab.1). The data processing flow of SINS/LDV integrated gravimetry system is also proposed. The system can finally realize the high-precision gravimetry in special environment. Result and Discussions The experiment was conducted in a special environment. During the experiment, the altitude changed greatly (Fig.4) and the GPS was seriously blocked (Fig.5). There are altogether 6 repeated lines in the experiment, each of which is about 11 km. During the experiment, the maximum horizontal error of SINS/LDV integrated navigation is about 17 m (Fig.8), and the maximum height error is about 2 m (Fig.9), which meets the requirements of system standard (Tab.1). Gravity anomaly were calculated according to the results of integrated navigation. The six lines based on SINS/LDV integrated system had a good consistency, and the maximum and minimum internal coincidence accuracy of a single survey line are 1.05 mGal and 0.47 mGal, and the total internal coincidence accuracy is 0.70 mGal (Tab.2). However, the consistency of the six lines based on SINS/GNSS integrated system are relatively poor. The maximum and minimum accuracy of internal coincidence of a single line are 2.46 mGal and 1.02 mGal, and the total internal coincidence accuracy is 1.53 mGal (Tab.3). The accuracy of SINS/LDV integrated system is generally better than that of SINS/LDV integrated system, and the total accuracy of SINS/LDV integrated system is about 54% higher than that of SINS/GNSS integrated system. Conclusions In this paper, a strapdown vehicle autonomous gravimetry method based on two-dimensional laser Doppler velocimeter is studied. The measurement principle and error model of the system are analyzed, and the corresponding index and data processing flow of the system are given. The vehicle gravimetry experiment shows that the consistency of the six lines in SINS/LDV integrated gravimetry system is high, while that of the six lines in SINS/GNSS integrated gravimetry system is relatively poor when the satellite signal is seriously blocked. Accordingly, the single internal coincidence accuracy of SINS/LDV integrated system is generally better than that of SINS/GNSS integrated system, and the total internal coincidence accuracy of SINS/LDV integrated system is nearly half higher than that of SINS/GNSS integrated system. The experimental results show that SINS/LDV integrated gravimetry system can realize gravimetry, and the gravimetry accuracy is higher than SINS/GNSS integrated gravimetry system in special measuring environment. The research of this paper provides technical support for the vehicle gravimetry in the environment when the GNSS signal is blocked, and the relevant results can be applied in geological exploration, gravity matching and the refinement of the earth's local gravity field. -
图 10 SINS/LDV组合重力异常测量结果
Figure 10. Gravity anomaly measurement results of the integration of SINS/LDV
图 11 SINS/GNSS组合重力异常测量结果
Figure 11. Gravity anomaly measurement results of the integration of SINS/GNSS
表 1 系统指标
Table 1. System index
Index Accuracy Velocity measurement accuracy of LDV ≤1‰ Calculation accuracy of acceleration/mGal ≤1 Measurement time of single line/h ≤1.7 Horizontal accuracy/m ≤10 Height accuracy/m ≤3  下载: 导出CSV
下载: 导出CSV
表 2 SINS/LDV组合重力测量系统内符合精度
Table 2. Internal coincidence accuracy of SINS/LDV integrated gravimetry system
Maximum Minimum RMS of
single lineRMS of
total lineInternal
coincidence
accuracy/
mGalLine 1 1.08 −1.46 0.73 0.70 Line 2 0.98 −1.00 0.47 Line 3 1.18 −2.47 0.66 Line 4 2.37 −1.78 1.05 Line 5 0.83 −1.24 0.53 Line 6 1.26 −1.04 0.59
下载: 导出CSV
表 3 SINS/GNSS组合重力测量系统内符合精度
Table 3. Internal coincidence accuracy of SINS/GNSS integrated gravimetry system
Maximum Minimum RMS of
single lineRMS of
total lineInternal
coincidence
accuracy/
mGalLine 1 2.22 −1.57 1.03 1.53 Line 2 1.82 −3.05 1.30 Line 3 3.36 −2.92 1.75 Line 4 1.38 −2.77 1.02 Line 5 2.58 −4.73 2.46 Line 6 1.62 −2.59 1.05
下载: 导出CSV
-
[1] 欧阳永忠. 海空重力测量数据处理关键技术研究[D]. 武汉: 武汉大学, 2013. Ouyang Yongzhong. On key technologies of data processing for air-sea gravity surveys[D]. Wuhan: Wuhan University, 2013. (in Chinese) [2] 孙中苗. 航空重力测量理论、方法及应用研究[D]. 郑州: 解放军信息工程大学, 2004. Sun Zhongmiao. Theory, methods and applications of airborne gravimetry[D]. Zhengzhou: Information Engineering University, 2004. (in Chinese) [3] 闻成. 从发射导弹“东远西近”说起 浅谈“地球自转”对军事活动的影响[J]. 兵器知识, 2007(4): 52-54. [4] 蔡劭琨. 航空重力矢量测量及误差分离方法研究[D]. 长沙: 国防科学技术大学, 2014. Cai Shaokun. The research about airborne vector gravimeter and methods of errors separation[D]. Changsha: National University of Defense Technology, 2014. (in Chinese) [5] 李东明, 郭刚, 薛正兵, 等. 激光捷联惯导车载重力测量试验[J]. 导航与控制, 2013, 12(04): 74-78. doi: 10.3969/j.issn.1674-5558.2013.04.017 Li Dongming, Guo Gang, Xue Zhengbing, et al. Gravimetry tests of laser strapdown INS on ground-vehicel [J]. Navigation and Control, 2013, 12(4): 74-78. (in Chinese) doi: 10.3969/j.issn.1674-5558.2013.04.017 [6] 于瑞航, 蔡劭琨, 吴美平, 等. 基于SINS/GNSS的捷联式车载重力测量研究[J]. 物探与化探, 2015, 39(S1): 67-71. Yu Ruihang, Cai Shaokun, Wu Meiping, et al. A study of SINS/GNSS strapdown ground vehicle gravimetry test [J]. Geophysical and Geochemical Exploration, 2015, 39(S1): 67-71. (in Chinese) [7] 邱雪峰, 季光巍, 王应建, 等. 航空重力仪的地面车载测量试验分析[J]. 测绘科学与工程, 2019, 39(2): 18-24. Qiu Xuefeng, Ji Guangwei, Wang Yingjian, et al. Analysis of the ground test for vehicle-mounted airborne gravimeter [J]. Geomatic Science and Engineering, 2019, 39(2): 18-24. (in Chinese) [8] 李新宇, 张志利, 周召发, 等. 基于SINS/OD/高度计的车载重力异常测量方法[J/OL]. 北京航空航天大学学报. (2023-02-27) [2023-03-28]. https://doi.org/10.13700/j.bh.1001-5965.2022.0766. Li Xinyu, Zhang Zhili, Zhou Zhaofa, et al. Vehicle gravity anomaly measurement methods based on SINS/OD/altimeter[J/OL]. Journal of Beijing University of Aeronautics and Astronautics. (2023-02-27) [2023-03-28]. https://doi.org/10.13700/j.bh.1001-5965.2022.0766. (in Chinese) [9] Yu R H. A new method for land vehicle gravimetry using SINS/VEL [J]. Sensors, 2017, 17: 766-777. [10] 高春峰, 魏国, 王琦, 等. 一维激光多普勒测速仪/单轴旋转惯导组合车载高程测量方法[J]. 红外与激光工程, 2022, 51(12): 9-17. Gao Chunfeng, Wei Guo, Wang Qi, et al. Height measurement method based on one-dimensional laser Doppler velocimeter and integrated navigation system of single-axis rotation inertial navigation system [J]. Infrared and Laser Engineering, 2022, 51(12): 20220704. (in Chinese) [11] 厉文涛, 聂晓明, 周健. 基于二维激光多普勒测速仪建立新组合导航系统的方法[J]. 中国激光, 2020, 47(03): 269-274. Li Wentao, Nie Xiaoming, Zhou Jian. Method for establishing new integrated navigation system based on two-dimensional laser Doppler velocimeter [J]. Chinese Journal of Lasers, 2020, 47(3): 0310001. (in Chinese) [12] 张开东. 基于SINS/DGPS的航空重力测量方法研究[D]. 长沙: 国防科学技术大学, 2007. Zhang Kaidong. Research on the methods of airborne gravimetry based on SINS/DGPS[D]. Changsha: National University of Defense Technology, 2007. (in Chinese) [13] 应智慧, 高春峰, 王琦, 等. 高精度激光多普勒测速仪在陆用自主导航系统中的应用[J]. 中国激光, 2017, 44(12): 159-166. Ying Zhihui, Gao Chunfeng, Wang Qi, et al. Application of high-accuracy laser Doppler velocimeter in self-contained land navigation system [J]. Chinese Journal of Lasers, 2017, 44(12): 1204003. (in Chinese) [14] 陈红江, 聂晓明, 王梦成. 基于二维激光多普勒测速仪的车载组合导航系统[J]. 红外与激光工程, 2018, 47(12): 218-224. Chen Hongjiang, Nie Xiaoming, Wang Mengcheng. Vehicle integrated navigation system based on two dimensional laser Doppler velocimeter [J]. Infrared and Laser Engineering, 2018, 47(12): 1217008. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 213
- HTML全文浏览量: 74
- PDF下载量: 26
- 被引次数: 0

