





















-
在区域大气的风速遥感中,相干测风激光雷达技术凭借探测精度和时空分辨率较高、结构紧凑等显著优势,在气象观测、航空航天保障、风能评估等领域取得了重大的成果,具有巨大的应用空间[1-3]。
相干测风激光雷达系统性能的关键衡量指标为探测气溶胶粒子目标的能力。其探测性能的提升主要体现在两个方面,一是有效探测范围内风速识别准确度即频移估计精度的提升;二是各探测方向维度有效探测距离的提升。其中有效探测距离取决于远距离探测导致的回波信号较弱条件下,弱信噪比范围内的信号识别质量。
相干测风激光雷达系统具有信噪比较低、持续时间短等特点。在应用于风场观测时,噪声杂波干扰较多、回波信号较弱及风场不均匀性使得测量的气溶胶粒子的移动信号被淹没在噪声中,信噪比大大降低,很大程度上影响了信号频移估计的精度。该情况将导致风速估计异常值及探测范围断层,是影响该种激光雷达测风精度从而限制其探测性能的主要原因[4]。
因此,在上述微弱回波信号的应用局限下,功率谱回波信号的有效处理和反演成为了激光雷达测风系统的重要环节,为实现精确反演风场起到了决定性作用。激光雷达进行风场探测的数据处理环节中,以提取多普勒频移为目标进行风速计算,多普勒频移的估计精度直接影响着激光雷达的风场探测性能。激光雷达系统的整体性能提升与多普勒频移的快速高精度估计具有直接联系。
由于功率谱频移估计的计算原理为通过检索各距离库的峰值频率,计算其与激光雷达系统的零风速频率偏移量即为频移估计数值,因此,相干测风激光雷达的风速估计即转换为峰值检测问题,通过峰值检测算法可解调得到回波信号反射谱的中心波长。
目前,国内外相干激光雷达系统常用的频移估计算法主要包括脉冲对算法(PP)、基于傅里叶变换的最大似然(Maximum Likelihood, ML)离散谱峰值(Discrete Spectral Peak, DSP)估计算法(ML DSP),最大似然估计、周期图最大似然估计等,Frehlich[5]对低信噪比信号脉冲累加处理算法进行了性能评估,此外,自适应滤波的算法也用于低信号范围的计算[6]。由于ML DSP估计算法基于快速傅里叶变换,在保证估计精度的同时,其计算的时间效率实际远高于ML算法。因此,ML DSP估计算法是目前实际工程中最为广泛使用的频移估计方法。
为了准确提取微弱回波信号中的多普勒频移以获得准确的测风信息,Dabas等提出了一种无大气背景噪声的自适应滤波估计算法[7-8],该算法可应用于频谱平均以下的高脉冲重复率的光纤激光器,实现高频段的噪声抑制,从而在一定程度上改进了频移估计算法,提高了风速估计精度[9]。北京理工大学的李路等[10]针对远场低信噪比区域的有偏估计现象,基于正则化惩罚最小二乘法,提出了先验平滑估计频谱基线方法,实现了距离门功率谱基线的漂移校正,提升了测风激光雷达的探测距离。哈尔滨工程大学的生雪莉等[11]对水声强干扰条件下目标回波信号多普勒频移估计困难的问题,利用信号的稀疏性,使用了一种基于稀疏分解的运动目标多普勒频移估计算法,验证了其能够较好适用于低信噪比下的回波多普勒频移估计。
Daniele Tosi等将常用的峰值检测算法分为直接法、曲线拟合法、相关法、转换法和基于算法优化等方法[12]。同时基于耦合模理论进行仿真,将各类算法在精度和抗噪能力方面的性能进行了对比,研究结果表明:直接法计算效率较高但精确度低;曲线拟合法对于采样要求较高;相关法抗噪性能差;转换法的精度取决于校准函数;基于优化的相关方法计算效率较低。2018年以后,峰值检测算法的进展大多集中于机器学习[13]、粒子群[14]和神经网络[15]等智能算法,此类算法提高了峰值检测的精度和鲁棒性,但是求解速度慢,实时性难以满足实际的工程需求。
为提高弱信号条件下目标信号峰值的检测精度,利用信号频谱的精确估计进行风速反演,文中在对回波功率谱信号采取FFT运算的基础上,针对频移估计算法优化的具体措施及其关键环节的峰值检测算法进行了以下探究:对于原始功率谱基线的平滑处理即噪声抑制、对于目标信号的分辨率增强峰值检测算法以及峰值检索质量评估,进行频移估计范围校正。有效提高了低信噪比探测范围内的多普勒频移估计精度,且进一步降低了激光雷达系统精确频移估计的信噪比阈值。
文中将常用的基于傅里叶变换的ML DSP估计算法与所提出的功率谱分析方法分别应用于相干测风激光雷达,通过实测径向风速数据,进行了功率谱分析方法的性能评估。通过自相关系数的统计分析,进行了风速估计的时间相关性及空间相关性验证,结果显示:采用功率谱分析方法反演得到的风速数据保持了较好的时空连续性及时域空间自相关特性。通过将激光雷达风场反演结果与时空匹配下的超声风速计定点观测参考结果进行比对分析,验证了提出的功率谱分析方法对于激光雷达风场探测性能提升的有效性。
-
目前相干测风激光雷达的频移估计主要采用以快速傅里叶算法为基础的频域处理算法,基于回波信号单位距离门内的多普勒频移估计,核心是利用FFT得到信号的频谱,当信号幅度谱模值取得最大值时,所对应的频率作为多普勒频移的估计值。
根据Zrnic激光雷达大气信号模型所述[16],相干探测脉冲激光测风雷达所获取的信号可认为是后向散射信号与噪声信号的叠加,将单个距离门内的采样信号表示为:
$$ {r_k} = {\text{A}}\cos [4\pi \nu k{T_{{s}}}/\lambda + \theta ] + {n_k},1 \leqslant k \leqslant N $$ (1) 式中:${T_s}$为采样时间间隔,$1/{T_{{s}}}$为采样频率;$\lambda $为激光脉冲的中心波长;$\nu $为当前距离门内探测的平均风速;$\theta $为随机相位;${n_k}$为噪声序列,满足相互独立的随机高斯分布。
径向风速与多普勒频移的关系式如下:
$$ {f_d} = \frac{1}{{2\pi }}\frac{{{\rm{d}}\varphi }}{{{\rm{d}}t}} = \frac{{2{v_r}}}{\lambda } $$ (2) 式中:后向散射信号$\varphi $为激光雷达获取的后向散射回波信号与参考信号间的相位差;${f_d}$为两信号间频率差;${v_r}$为径向风速。
$$ {r_k} = {{A}}\cos [2\pi {f_{{\rm{Doppler}}}}k{T_s} + \theta ] + {n_k},1 \leqslant k \leqslant N $$ (3) 后向散射信号相对于本振光信号即参考出射信号的频率偏移量${f_d}$与待测目标相对激光雷达光束径向方向上的运动速度成正比关系,且与激光发射波长成反比。因此,通过多普勒频偏值的精确反演可实现气溶胶粒子径向风速的测量。
功率谱频移估计的计算原理为通过检索各距离库的峰值频率,将其与激光雷达系统的零风速频率做差,得到频移的估计数值。由功率谱数据计算径向风速原理如下:从每个距离门中的功率谱数据(已减去本底噪声)中找出峰值位置${X_{\max}}$,与中心频率位置$X$做差,得到偏值$X - {X_{\max}}$,根据公式计算各距离库的径向风速为:
$$ {V_{los}} = \frac{{\left( {X - {X_{\max}}} \right){f_N}}}{N} \times \frac{\lambda }{2} $$ (4) 式中:${V_{los}}$为当前距离门对应探测距离的径向风速估计值;${f_N}$为快速傅里叶变换FFT采样频率;$N$为快速傅里叶变换FFT的采样个数。
其中,ML DSP估计算法作为目前实际工程中最广泛使用的频移估计方法,利用谱密度实现回波信号的频率计算。
ML DSP估计算法利用谱密度实现回波信号的频率计算。回波信号的谱分布由周期图表示为[17]:
$$ {\hat P_u}\left( m \right) = \frac{{{T_s}}}{M}{\left| {\mathop \sum \nolimits_{k = 0}^{M - 1} {z_k}\exp \left( { - \frac{{2\pi ikm}}{M}} \right)} \right|^2} $$ (5) 式中:$M$为单一距离门内的采样点数;${z_k}$表示激光雷达回波的时域信号[18-19]。
$$ \hat P\left( m \right) = \frac{1}{N}\mathop \sum \nolimits_{n = 0}^{N - 1} {\hat P_u}\left( {m,n} \right) $$ (6) 采样后的观测数据可以表示为[20]:
$$ {z_n} = {s_n}\exp \left( {\frac{{j4\pi v{T_s}n}}{\lambda }} \right) + {\varepsilon _n} $$ (7) 式中:第一项为回波中的信号成分;$v$为大气风场平均风速;${s_n}$为接收回波信号的幅度;${\varepsilon _n}$为噪声;${s_n}$、${\varepsilon _n}$均为零均值的复高斯随机过程,并且相互独立。
在协方差矩阵非奇异的情况下,复随机信号$z$的联合概率密度函数可以表示为:
$$ f\left( {z|\theta } \right) = \frac{1}{{{\pi ^N}|R\left( \theta \right){|^2}}}\exp \left[ { - {z^H}{R^{ - 1}}\left( \theta \right)z} \right] $$ (8) 式中:$\left| {R\left( \theta \right)} \right|$表示$R\left( \theta \right)$的行列式;${R^{ - 1}}\left( \theta \right)$表示$R\left( \theta \right)$的逆矩阵。对联合概率密度函数取对数,参数$\theta $的最大似然估计的似然函数可以表示为:
$$ L\left( \theta \right) = - {z^H}{R^{ - 1}}\left( \theta \right)z - 2\ln \left( {\left| {R\left( \theta \right)} \right|} \right) - N\ln \left( \pi \right) $$ (9) 因此,多普勒频移的最大似然估计为:
$$ {\hat f_{ML}} = \mathop {{\rm{argmax}}}\limits_f L\left( \theta \right) $$ (10) 对于传统的峰值检测算法,优点在于直接法和曲线拟合法计算简单、时间花销小,但由于分辨率问题或反射光谱畸变,这些方法的准确性和稳定性有限[21]。相关法计算待测反射谱与参考反射谱之间的相关性直接给出中心波长的位移量,抗噪性能较好但对反射谱的采样率要求高。而转化法本质上仅限于较小的光谱范围,计算量大。基于优化的算法既包括基于参数优化对以上几种经典算法的改进,也包括对蚁群算法、遗传算法、机器学习等智能算法的优化。这些优化算法在获取精度的同时,需要的时间成本较高,且计算复杂,不利于快速解调的实现,不适合实时测量系统。
文中研究以基于傅里叶变换的ML DSP估计算法为基础,得到风速估计的离散功率谱分布。然后针对得到的功率谱,采用非线性最小二乘拟合的去趋势项算法,结合线性预测频谱估计与导数增强的功率谱分析方法,来提高低信噪比条件下的相干测风激光雷达的风速反演精度。
文中研究利用实测激光雷达回波信号的功率谱频移进行性能分析。实测信号来源于选用的相干多普勒激光雷达设备:青岛镭测创芯科技有限公司的三维扫描型激光测风雷达3D6000,系统采用外差检测法,检测原理是通过利用大气中气溶胶的激光后向散射信号和激光发射系统的本振光做外差检测,获得两束光的外差信号,进而得到多普勒频移计算的径向风速,用微型光束扫描系统反演边界层风速风向廓线,同时提供能见度数据。具体设备参数技术指标见表1。
表 1 相干多普勒激光雷达设备性能参数
Table 1. Device performance parameters of coherent Doppler lidar
Index Parameter Pulse wavelength/nm 1550 Pulse energy/μJ 150 Pulse width/ns 300 Pulse repetition frequency/kHz 10 Radial range resolution/m 30 Radial measuring range/m 60-4000 Accuracy of wind speed/m·s−1 <0.1 Power consumption/W 200 Scanner positioning accuracy/(°) <0.1 此外,对于采用的该相干激光雷达测试系统进行了相应的激光器波长漂移及激光器出射功率波动情况的检测,设备的波长设定为1550 nm,测试时段内观测波长与设定值1550 nm差值均分布在$ \pm $2 pm以内,根据上文中径向风速与多普勒频移的关系式可得,因波长漂移量∆λ所导致的风速测量误差∆v与相干激光雷达的风速分辨率0.1 m/s相比可忽略不计。实验期间同时对激光器出射功率的波动情况进行了检测,观测时段内激光器的出射功率均值为234.41 W,标准差为1.68 W。观测期间激光器功率较为稳定,变化范围在±5 W内,该因素在研究风速测量精度的影响时可忽略不计。
-
对于原始功率谱基线的平滑处理,目前常用基底噪声剔除算法[22],该算法将相干测风激光雷达回波信号最后几个距离门内的数据视作不包含有效信号,将其作为系统噪声背景进行剔除。文中应用了基于非线性最小二乘拟合的基线趋势项噪声拟合算法,针对每个特定距离门的趋势项进行拟合及剔除。该算法中噪声功率谱是由每个特定距离门的频谱分布计算得出,可以有效降低由于基底噪声自身振动变化导致的干扰现象,以便于后续从噪声中更容易区分识别信号功率谱峰值。图1给出了两种本底噪声剔除算法的流程示意图,基线趋势项噪声拟合算法的应用避免了本振激光功率抖动对本底噪声选取的影响。

图 1 两种本底噪声剔除算法流程图
Figure 1. Flow chart of two background noise removal algorithms
利用相干多普勒激光雷达3D6000的实测数据,对基底噪声扣除算法及基线趋势项噪声拟合算法两种噪声去除算法的峰值识别频谱估计结果进行对比分析,如图2所示。图中蓝色点线表示当前距离门原始功率谱数据,黄色点线表示采用基底噪声扣除算法计算所得当前扫描脉冲下最后10个距离门平均噪声,红色实线表示采用基线趋势项噪声拟合算法所得当前距离门噪声背景。图中下方蓝色曲线为采用基底噪声扣除算法进行去噪处理后的谱线分布,红色点线为基线趋势项拟合噪声剔除后的谱线分布,最终的信号峰值检测结果对应图中蓝色及红色五角星标识。

图 2 探测距离2370 m处两种噪声剔除算法模型下的频谱估计结果对比
Figure 2. Comparison of spectrum estimation results of two noise removal algorithms at a detection distance of 2370 m
在图中探测距离为2370 m的远场探测时,信噪比数值为5.73 dB,属于弱信噪比条件,此时在两种噪声剔除算法的模型下,频谱曲线的峰值频率识别结果不一致,且峰值频率数值差异较大,说明随着探测距离的增加,远场弱信号范围内两种噪声剔除算法的去噪效果存在差异。
选用的激光雷达设备经静止目标反射的回波信号反映零风速对应的频谱位置,在实验中给出该中心频率固定值为51.16。由图2分析可知,基线趋势项拟合噪声剔除所得的功率谱峰值频率更接近该中心频率数值51.16,基于平稳大气下风速连续及时空连续性的性质,经过剔除基线趋势项拟合噪声后,再进行峰值识别,所得的多普勒频移量可靠性更高。
-
对于研究的目标微弱信号主要采取了设置系统信噪比阈值作为标准进行定义。该信噪比参数定义为激光雷达系统经主放处理后的激光雷达回波信号强度与背景噪声水平之间的比值关系。根据相干测风激光雷达数据处理流程中径向风速数据质量控制原理,目前该激光雷达系统的数据处理模块一般采用信噪比阈值为8 dB的指标。该指标的确定依据来自中国海洋大学的翟晓春等[23]关于相干测风激光雷达风速测量的随机误差与信噪比关系的研究结果。
在原有功率谱数据频移估计算法的基础上,开展的信噪比阈值指标在8 dB的以下,即定义为属于弱信号范畴内距离库的频谱识别算法的优化。以期降低满足精确频率估计需求的激光雷达系统的信噪比阈值,进一步提高风速反演精度和有效探测距离。
针对弱信噪比条件下气溶胶粒子移动信号被淹没在噪声中的情况,采用峰锐化算法对信号及其偶数阶微分进行加权来提高峰分辨率,即信号谱峰模值增强算法(Derivative enhancement approach)[24]。该算法在保留峰值面积和峰值位置的同时,利用导数的性质在数学上提高信号的分辨率,使得目标信号得以从噪声背景中凸显。算法基于分布的导数下的面积等于零的原理,通过在原始峰值上交替地减去或加上偶数阶导数(二阶、四阶、六阶等),峰值下的面积得到了守恒,实现了频谱信号带宽减小,峰值窄带内信号幅值增强。
将上述算法原理应用于激光雷达实测数据,选取弱信号条件下信噪比数值为3.27 dB的单个距离库,图3显示了采用偶导数谱峰增强算法在该探测距离所得频谱数据的应用效果。由图可以得出,应用偶导数谱峰增强算法后,在保留频谱分布的峰值位置不变的同时,其频谱信号峰顶宽度明显减小,峰值窄带内的信号幅值增强,提高了目标信号谱峰在全频段模值分布中的分辨率。

图 3 利用偶导数的峰值锐化原理进行谱峰增强前后的对比示意图
Figure 3. Comparison diagram of spectral peaks before and after enhan-cement using the peak sharpening principle of even derivatives
通过应用该偶导数谱峰增强算法,从部分解析的功率谱中恢复信号幅度谱的模值信息,有助于后续在弱信噪比条件下进行回波信号的峰值检索。此外功率谱信号峰值展宽谱对于峰值检测的稳定性存在影响,通过对其进行锐化,一方面可提升功率谱的分辨率,另一方面也能提升系统数据处理的稳定性。
-
针对频谱估计环节中低信噪比探测范围内频移估计产生偏差的问题,文中提出了一种线性预测的频谱估计算法。基于平稳大气下风速连续及时空连续性的性质,通过线性预测频谱估计法监测弱信噪比区间内功率谱频移估计的质量,对信噪比水平明显低于其范围邻域的区间内的多普勒频移估计值进行自适应调整,使之符合邻近的强信噪比区间的风速估计结果,进行频移估计范围校正。
根据相干测风激光雷达数据处理流程中径向风速数据质量控制原理,相干测风激光雷达系统的数据处理模块一般采用固定数值信噪比阈值作为质量控制指标。该探测阈值的确定主要取决于当信噪比水平低于该下限时能否有效进行频移估计量的识别,即能否在功率谱中准确地识别代表回波信号的峰值并估算其频移。
然而,在实际数据分析和处理过程中,选取固定阈值进行质量控制处理导致风场有效探测距离受到很大限制。因此,文中在原有功率谱数据频移估计算法的基础上,对频移估计质量评估开展了算法优化,并进行弱信号条件下的频移估计校正,以期降低实现精确频率估计需求的激光雷达系统信噪比阈值,进一步提高风速反演精度和有效探测距离。提出了线性预测频谱估计算法,该算法主要包括初始峰值识别、算法内外插模式预判断、内插法/外插法频谱估计及最终峰值选取逻辑判断四个部分,算法流程见图4。

图 4 线性预测频谱估计算法流程
Figure 4. Flow chart of linear prediction spectrum estimation algorithm
线性预测频谱估计算法处理前后对比如图5所示,观测时间为2022年5月9日15:03:36,距离库所在径向探测距离为14700 m。

图 5 内插法频谱估计算法处理前后对比示意图(2022-05-09 15:03:36-探测距离:14 700 m)
Figure 5. Comparison diagram of interpolation spectrum estimation algorithm before and after processing (2022-05-09 15:03:36-detection distance bin: 14700 m)
由图可以得出,针对频谱估计环节中低信噪比探测范围,部分距离库回波信号强度及信噪比数值明显低于临近左右探测范围的情况,沿用原始谱估计算法将导致其频移估计产生误差,经初始峰值识别,所得功率谱峰值频率对应的径向风速数值为17.24 m/s,大大偏离实际风速数值分布。而应用内插法频谱估计算法,通过距离库邻域内强信噪比范围的多普勒偏移估计的统计量对其频移估计范围进行自适应校正,二次求解频域范围内的峰值信息计算所得的风速数值为−0.17 m/s,与临近距离库平均风速数值−0.015 m/s较为接近,且符合实际的风速时空分布。
-
基于上述对于功率谱频移估计具体优化方法和算法实现的分析和验证,文中提出了基于非线性最小二乘噪声拟合、偶导数谱峰增强和线性预测频谱估计的功率谱分析方法,该算法具有噪声抑制效果好、弱信号识别能力强、风速估计准确度高等特点。基于该综合算法的功率谱信号处理流程如图6所示。

图 6 功率谱频移估计综合算法信号处理流程
Figure 6. Signal processing flow of integrated algorithm of power spectrum frequency shift estimation
-
观测数据来源于2019年3月~10月在某机场开展的多设备联合观测实验。沿机场的跑道分别配置了六台超声风速计,提供了所在布放位置10 m高度处的风速风向参考及环境风场的观测验证。
观测实验选用的两台相干多普勒测风激光雷达设备为三维扫描型激光测风雷达3D6000,具体设备参数技术指标如表1所示。引入超声风速计Vaisala WMT700作为观测实验的对照设备,其技术参数指标如表2所示,选用的脉冲相干多普勒激光雷达与超声波风速仪设备实物图如图7所示。
表 2 超声风速计Vaisala WMT700设备技术参数
Table 2. Equipment technical parameters of ultrasonic anemometer Vaisala WMT700
Index Parameter Wind speed measurement range/m·s−1 0-40 Accuracy of wind speed/m·s−1 ±0.1 Wind speed resolution/m·s−1 0.01 Response time/ms 250 Wind direction measurement range/(°) 0-360 Accuracy of wind direction/(°) ±2 Wind direction resolution/(°) 0.01 
图 7 (a) 三维扫描型脉冲相干多普勒激光雷达 Leice Wind3D6000;(b) 超声波风速仪Vaisala WMT700
Figure 7. (a) 3D scanning pulsed coherent Doppler lidar Leice Wind3D6000; (b) Ultrasonic anemometer Vaisala WMT700
-
为进一步验证基于线型预测频谱估计的功率谱分析方法对于弱信号区域相干测风激光雷达的探测性能指标提升的有效性,分别采用两种频移估计模型:ML DSP估计算法和提出的功率谱分析方法,对观测实验所得实测回波信号进行处理,实现算法性能的对比分析。
选取该相干多普勒激光雷达设备三维扫描型激光测风雷达3D6000于2019年3月26日进行的风速测量实验数据,当日实验场地所在北京首都机场,天气晴,气温5~18 ℃,风速为东南风2~4级,探测方向与东南方向夹角约为136°。扫描时间为05:22:05,俯仰角为30.14°,风速估计点数为150个,图8中显示了应用提出的功率谱分析方法前后,激光雷达在该扫描方向上风速估计结果的对比。
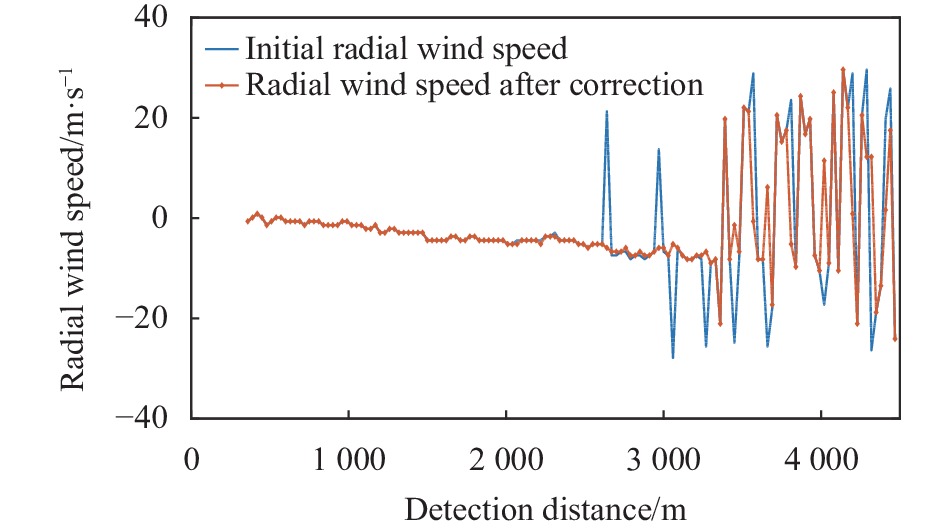
图 8 固定扫描方向上两种频移估计模型风速评估结果对比图
Figure 8. Comparison diagram of wind speed evaluation results of two frequency shift estimation models in a fixed scanning direction
由图中信息可知,整体而言,随着距离的增加,两种频移估计模型的风速测量精度都有所下降。根据平稳大气下风速连续性原理可知,采用ML DSP估计算法的最大可探测距离为2640 m,应用提出的功率谱分析方法优化处理后可得最大可探测距离为3300 m。经过提出的功率谱分析方法进行优化处理后,激光雷达有效探测距离增加了近660 m,且在探测距离0~2640 m之间,两种算法的风速评估曲线基本吻合。证明了相较ML DSP估计算法,提出的功率谱分析方法在风速测量方面的稳定性更高,特别是在远场探测区域,两种估计算法的风速估计准确度差距明显。
选取俯仰扫描中所有方位角,对两种频移估计模型下径向风速有效探测距离进行对比,如图9所示。

图 9 各俯仰角扫描方向上两种频移估计模型有效探测距离对比图
Figure 9. Comparison of the effective detection range of the two frequency shift estimation models in each pitch angle scanning direction
由图分析可得,应用综合算法后,反演风速的有效探测距离在各扫描方向上均得到了有效提升,个别俯仰角方向上风场有效探测距离之差可达1000 m。证明了综合算法的有效性。
-
上述分析证明了针对选定一组的数据,提出的功率谱分析方法进行优化处理的有效性,下面将这两种算法应用于连续时间内的数据。采用2019年3月26日观测的风场探测实验数据,从时间维度对风速绝对值计算累加平均及标准差,对观测时间06:00~07:30期间90 min内、探测俯仰角为6°方向上观测所得风速数据进行整体评价,如图10所示。

图 10 (a) 两种频移估计模型所得平均绝对风速随探测距离分布的变化;(b) 两种频移估计模型所得风速标准差随探测距离分布的变化
Figure 10. (a) Distribution of the mean absolute wind speed with the detection distance under the two frequency shift estimation models; (b) Distribution of the wind speed standard deviation with the detection distance under the two frequency shift estimation models
由图可分析,探测距离2010 m以内,采用两种频移估计模型所得平均绝对风速及风速标准差分布基本一致,其中风速标准差数值强度均低于1 m/s。随着探测距离的增加风速结果出现了较大分歧。当探测距离超过2 010 m后,采用ML DSP估计算法所得风速结果开始出现较大波动,直到探测距离超过2370 m时,风速标准差数值迅速增大超过4 m/s。而采用提出的功率谱分析方法所得风速结果在2010~3480 m的范围内仍然保持较为平稳的风速变化趋势,风速标准差数值强度均保持在2.6 m/s以下。直到探测距离为3480 m处,平均风速数值产生突变,风速标准差数值出现突增。
根据平稳大气下风速连续性原理,激光雷达有效探测距离增加了近1470 m,且在探测距离0~2 010 m之间,两种算法的风速评估曲线基本吻合。由该组数据可以推断,采用提出的功率谱分析方法相比MLDSP估计算法的有效风场探测距离提升了近73%。
-
为进一步验证两种频移估计模型风速估计性能,下面通过计算风速数据的自相关函数展开对于风速距离序列的相关性分析。风速序列的自相关系数越高,风速数据间的空间相关性越强,反演风速相对于空间距离内的变化就越平稳。上述径向风速统计值风速距离序列的相关性分析如图11所示。

图 11 两种频移估计模型反演所得风速空间自相关函数随探测距离的变化
Figure 11. Variation of the spatial autocorrelation function of wind speed retrieved by two frequency shift estimation models with the detection range
在探测距离为390~1530 m的近距离探测时,采用提出的功率谱分析方法的风速自相关系数平均值保持在59.7255,而ML DSP估计算法自相关系数平均值在该探测范围内对应地只有46.9562。此外当探测距离达到2370 m时,ML DSP估计算法所得风速结果在空间上的自相关系数降到0值以下,即采用ML DSP估计算法所得风速结果呈现空间负相关,该结果与风速分布的时空均匀性理论相悖。而采用提出的功率谱分析方法进行优化处理后,在显示的4000 m探测范围内其自相关系数均在0阈值以上,风速结果保持了较好的空间自相关特性。
-
对比验证方案设计基于相干激光雷达RHI俯仰扫描观测和超声风速计定点观测两个角度,通过扫描时刻及探测高度的同步,实现观测数据的时空匹配,进而将激光雷达风场反演结果与超声风速计定点观测参考结果进行比对分析。相干激光雷达采用RHI俯仰扫描模式,距离分辨率为30 m,时间分辨率为1 s,其扫描方位角与跑道方向一致,俯仰角在0°~45°范围内变化,分辨率为1°。沿跑道配置了三台超声风速计,其中超声风速计Sonic-01与激光雷达同时布放于01跑道端,超声风速计Sonic-MID3与超声风速计Sonic-19与激光雷达位于同一直线方向,距激光雷达水平距离分别为1300 m及2600 m,分别提供了所在布放位置10 m高度处,时间分辨率为30 min平均的风速风向参考及环境风场的观测验证,设备布放及观测示意如图12所示。

图 12 沿01-19跑道方向设备布放及扫描示意图
Figure 12. Schematic diagram of equipment placement and scanning along runway 01-19
通过将两种频移估计模型:ML DSP估计算法和提出的功率谱分析方法,分别应用于激光雷达功率谱数据得到两组径向风速的反演结果。超声风速计观测所得水平风速结果经风速矢量分解可得到RHI俯仰扫描平面内的径向风速,图13及图14分别展示了三维矢量风场示意图及RHI扫描平面上风速矢量的分解示意图。
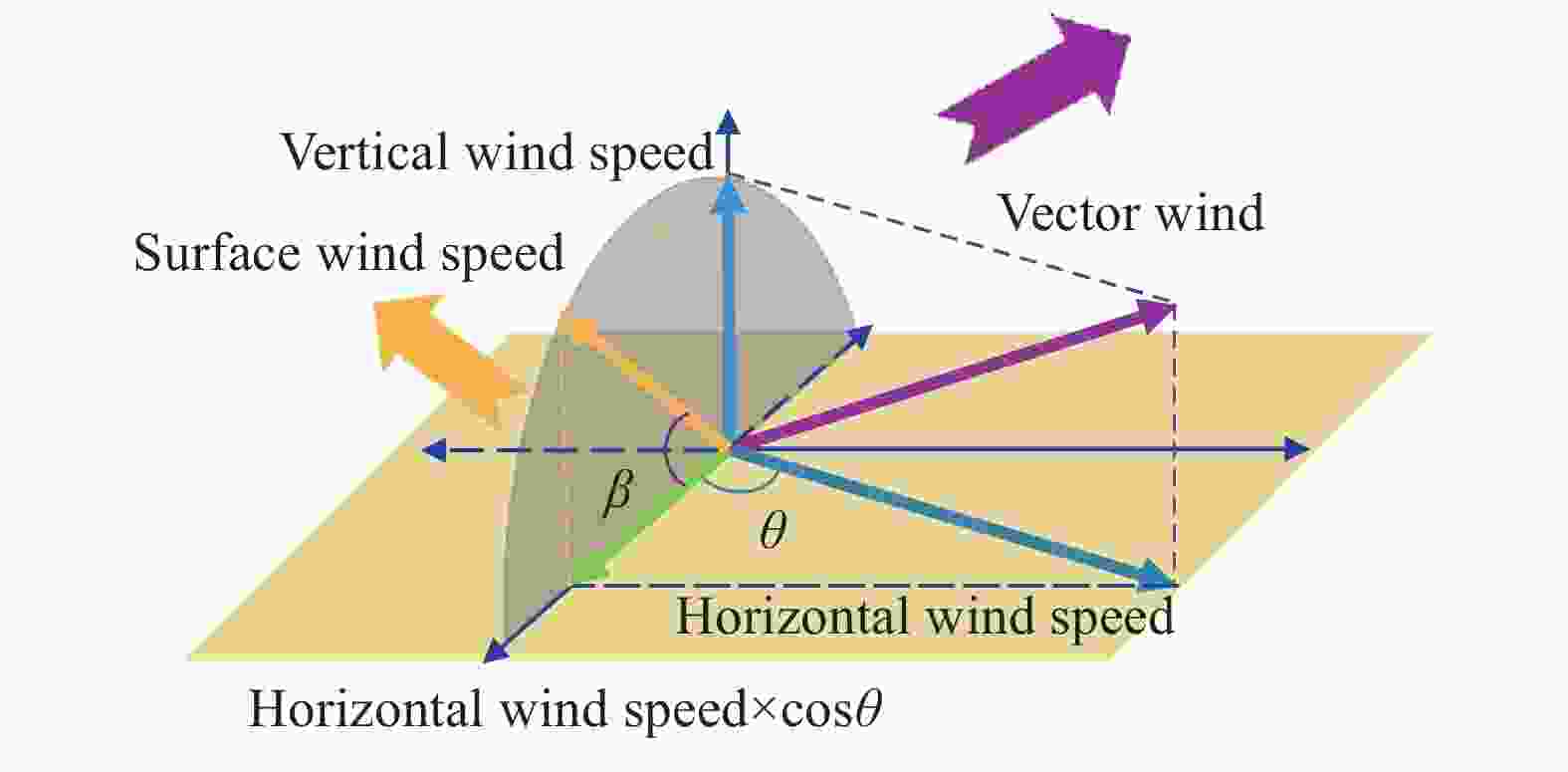
图 13 三维矢量风场及RHI扫描平面示意图
Figure 13. Schematic diagram of 3D vector wind field and RHI scanning plane

图 14 RHI扫描平面上风速矢量分解示意图
Figure 14. Schematic representation of wind speed vector decomposition on the RHI scan plane
将超声风速计所得径向风速通过时空匹配与上述两组激光雷达径向风速反演结果进行比对分析,以实现激光雷达风场探测结果准确性验证。
-
获取2019年4月1日~4月30日共30天内激光雷达及超声风速计连续观测的数据,进行风速结果的对比验证。
激光雷达近场观测时对应参考设备为超声风速计Sonic-MID3,其探测位置对应激光雷达探测距离1300 m处。激光雷达远场观测时对应参考设备为超声风速计Sonic-19,其探测位置对应激光雷达探测距离2600 m处。观测时间内共得超声风速计Sonic-MID3及Sonic-19测量数据各1440组,平均处理后两种频移估计模型下反演所得激光雷达径向风速数据各1440组。
相干激光雷达探测距离1300 m处近场观测探测结果与超声风速计对比如图15所示,图(a)与图(b)分别为应用ML DSP估计算法和提出的功率谱分析方法反演所得径向风速与对应超声风速计径向风速测量结果相关性分析的拟合结果。

图 15 激光雷达近场观测数据与超声风速计数据相关性分析。(a)应用ML DSP估计算法反演所得径向风速;(b)应用提出的功率谱分析方法反演所得径向风速
Figure 15. Correlation analysis of lidar near-field observation data and ultrasonic anemometer data. (a) The obtained radial wind speed retrieved by applying the maximum likelihood discrete spectrum peak estimation algorithm; (b) The obtained radial wind speed retrieved using the proposed power spectrum analysis method
图中经五倍标准差质量控制剔除奇异值点后的有效数据均为1438组,ML DSP估计算法与超声风速计的径向风速决定系数为0.97,标准偏差SD为0.34 m/s,偏离率BIAS为0.46 m/s;应用提出的功率谱分析方法后风速结果与超声风速计的径向风速决定系数为0.98,标准偏差SD为0.24 m/s,降低了0.1 m/s,偏离率BIAS为0.34 m/s,降低了0.12 m/s。激光雷达探测距离较近时,信噪比水平较高,两种频谱估计模型与参考设备的数据吻合度较高,风速估计结果精确度均保持在较高水平。
下面对相干激光雷达探测距离为2600 m的远场观测处的探测结果与超声风速计的进行相关性分析,图16(a)为应用ML DSP估计算法反演所得径向风速与对应超声风速计径向风速测量结果相关性分析拟合结果,图(b)为应用提出的功率谱分析方法反演所得径向风速与对应超声风速计径向风速测量结果相关性分析拟合结果。
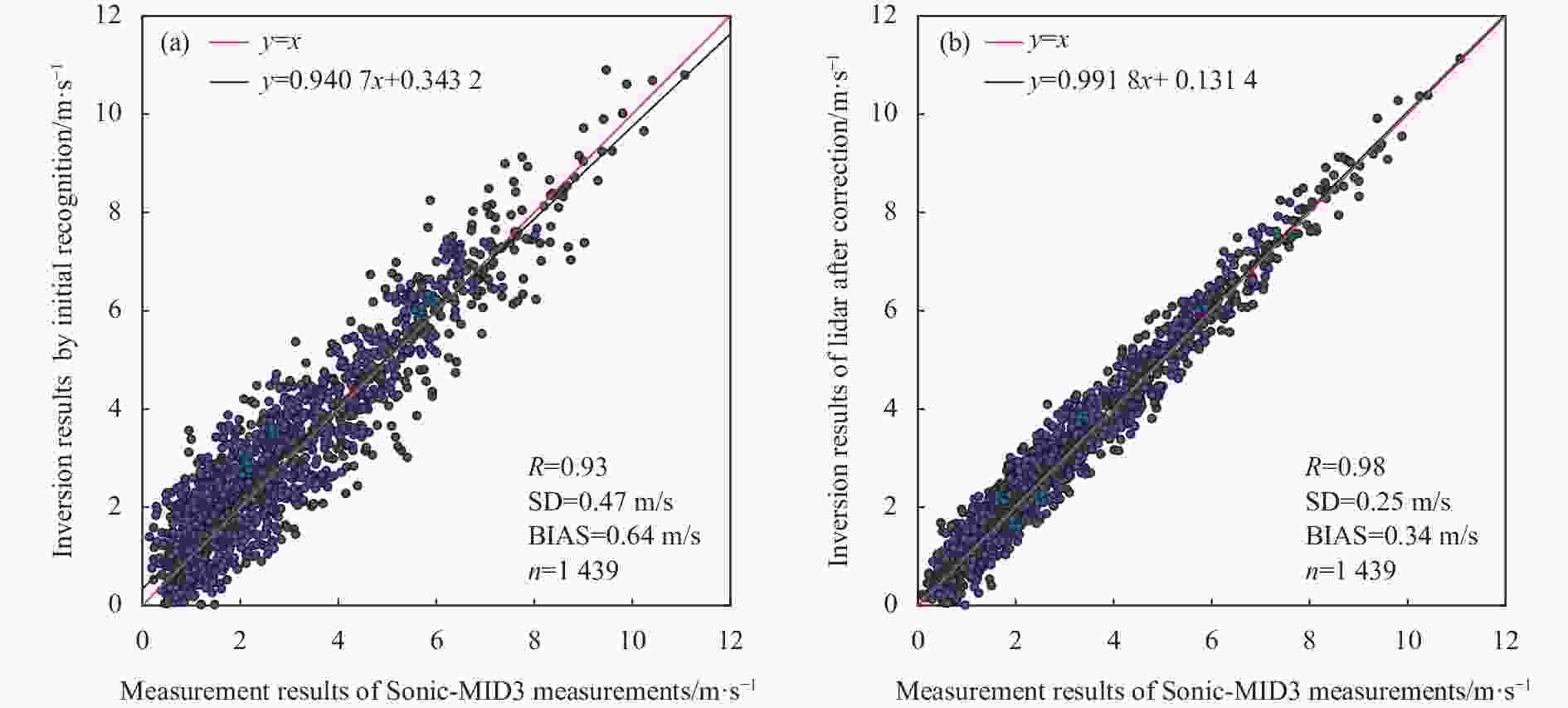
图 16 激光雷达远场观测数据与超声风速计数据相关性分析。(a)应用ML DSP估计算法反演所得的径向风速;(b)应用提出的功率谱分析方法反演所得的径向风速
Figure 16. Correlation analysis of lidar far-field observation data and ultrasonic anemometer data. (a) The obtained radial wind speed retrieved by applying the maximum likelihood discrete spectrum peak estimation algorithm; (b) The obtained radial wind speed retrieved using the proposed power spectrum analysis method
图中经五倍标准差质量控制剔除奇异值点后的有效数据均为1439组,ML DSP估计算法与超声风速计的径向风速决定系数为0.93,标准偏差SD为0.47 m/s,偏离率BIAS为0.64 m/s;应用提出的功率谱分析方法后风速结果与超声风速计的径向风速决定系数为0.98,标准偏差SD为0.25 m/s,偏离率BIAS为0.34 m/s。综上分析,以超声风速计测量结果作为参考,远场观测时,应用ML DSP估计算法所得风速反演结果与近场观测时在精度上有明显降低,风速标准偏差及偏离率较大,径向风速的比对数据中出现大量的奇异值,与参考数据之间的差值远大于三倍标准偏差。即在远场观测条件下,由于激光雷达获取的回波信号较弱,信噪比较低,作为传统的基于傅里叶变换的谱估计方法,随着信噪比的降低,ML DSP估计算法的多普勒频移估计质量急剧下降,所得风速估计准确度大幅度降低。
相较于ML DSP估计算法,应用提出的功率谱分析方法后,风速结果与超声风速计的吻合度明显提升。且与近场观测相比,反演风速数据与参考设备的数据吻合度、风速标准偏差及偏离率数值几乎保持一致,均维持在较高水平。
-
文中同时进行了实验误差分析,由于提出的优化算法中线性预测频谱估计法基于平稳大气下风速连续及时空连续性的前提条件,算法提升效果主要受大气湍流强度的约束。提出的优化算法在大气稳定度较高的风场环境下,对于激光雷达风场观测性能的提升作用较为明显,而在大气湍流较强时算法效果存在一定的局限性。
该垂直气流速度观测实验选用了相同型号的相干激光雷达设备进行DBS多波束扫描的实测数据。通过对相干激光雷达数据的反演,DBS多波束扫描模式下测量所得2019年3月26日全时段垂直气流速度的时间-高度-强度分布如图17所示。绘制垂直气流速度分布统计箱线图表征其分布分散情况,如图18所示。

图 17 垂直气流速度时空分布THI (时间-高度-强度)图
Figure 17. Time-height-intensity (THI) plot of the spatial and temporal distribution of vertical wind speed

图 18 垂直气流速度分布统计箱线图
Figure 18. Statistical box plot of vertical airflow velocity distribution
由图可知,在连续观测的全天范围内,垂直风速分布在−1~1 m/s之间,00:00~08:00及晚间18:00~24:00期间垂直湍流活动较弱,保持了较好的大气平稳度。除12:00~17:00期间探测高度1000 m以下区域垂直气流速度出现小幅度增强外,其余时刻各高度层垂直气流速度数值均在±0.2 m/s范围内浮动。通过垂直观测实验验证了在非强对流天气下垂直风速相比较小,在风速精度允许范围内,满足垂直方向上风场均匀性假设条件。
上述观测实验当天,径向风速有效探测距离随时间分布如图19所示。图中横坐标表示当日具体观测时间,纵坐标表示各时刻激光雷达径向风速有效探测距离。图中黑色折线表示应用ML DSP估计算法的有效探测距离,红色折线表示应用提出的频移估计综合算法后的风速有效探测距离分布,黄色折线表示二者差值。

图 19 激光雷达风场有效探测距离的时间分布图
Figure 19. Temporal distribution of effective detection range of lidar in wind field measurement
由图可得,当日全时段内应用综合算法反演风速的有效探测距离均有明显提升。当日00:00~08:00垂直湍流活动较弱时,应用提出的综合算法对于相干激光雷达风场有效探测距离的提升效果更为显著,部分时刻两种频移估计模型下有效探测距离之差可达1000~1500 m。自12:00后,受大气湍流过程影响导致了风场不均匀性,两种频移估计模型下的激光雷达有效探测距离均出现明显降低,特别在当日12:00及20:00时刻,风速有效探测距离显著降低至2 000 m左右。此时频移估计综合算法的应用对于风场有效探测距离的提升作用较为有限,有效探测距离提升数值基本在500 m范围以内。
综合上述风场有效探测距离日分布和激光雷达观测所得垂直气流速度数值变化,可得有效探测距离变化特征与垂直风速时空分布图中的突变时刻较为一致,观测时段内风速有效探测距离的变化与对应时刻垂直湍流活动强弱存在较强的相关性。大气稳定度同时也影响了提出的频谱估计综合算法相对常用的ML DSP估计算法在激光雷达风场探测有效距离上的提升度。后续将设计探测区域内湍流强度对于算法应用影响作用的定量分析实验,进一步确定算法适用的湍流强度阈值。
-
针对微弱回波信号的检索难度大、风场探测性能受限的研究背景,提出了基于非线性最小二乘噪声拟合、偶导数谱峰增强和线性预测频谱估计的功率谱分析方法。对提出的频谱估计综合算法进行了性能评估,验证了算法具有噪声抑制效果好、弱信号识别能力强、风速估计准确度高等特点,可用于弱信噪比信号下的激光雷达精确反演和高性能探测。
利用相干测风激光雷达3D6000在北京首都机场开展了RHI扫描模式下的风场观测实验,结果表明:提出的频移估计综合算法在风速测量方面的稳定性更高,特别是在远场探测区域,提出的功率谱分析方法与ML DSP估计算法的风速估计准确度差距明显,反演风速的有效探测距离在各扫描方向上均得到了有效提升。结合反演所得风速结果的时间相关性及空间相关性验证,得出使用提出的频移估计方案反演所得风速数据的时间相关性更强,风速变化更平稳,且保持了较好的空间自相关特性。采用提出的功率谱分析方法相比ML DSP估计算法的有效风场探测距离提升了73%。
开展了基于相干激光雷达RHI俯仰扫描观测和超声风速计定点观测的验证实验。通过扫描时刻及探测高度的同步,实现观测数据的时空匹配,进而将激光雷达风场反演结果与超声风速计定点观测参考结果进行比对分析。相较于ML DSP 估计算法,应用提出的频移估计方案后的风速结果与超声风速计的吻合度明显提升。特别是在远场弱信号条件下,频谱估计综合算法的应用对于风速估计准确度提升作用明显,所得风速结果比超声风速计的标准偏差降低了0.25 m/s,偏离率BIAS降低了0.30 m/s。探测距离为 1300 m及2600 m处,其与超声风速计的径向风速决定系数均为0.98,风速标准偏差SD分别为0.24 m/s和0.25 m/s,偏离率数值BIAS均为0.34 m/s。反演风速数据与参考设备的数据吻合度及风速估计结果的精确度均维持在较高水平。
此外考虑了垂直湍流活动对于综合算法性能的影响,相关分析结果表明,观测时段内风速有效探测距离的变化与对应时刻垂直湍流活动强弱存在较强相关性。大气稳定性也同时影响了频谱估计综合算法相对常用ML DSP估计算法在激光雷达风场探测有效距离上的提升度。同时由于比对设备的空间分辨率差异及时间平均处理的影响,导致了相干激光雷达与超声风速计风场探测结果的个别偏差。
综上所述,提出的频谱估计综合算法适用于远场弱信号观测的应用条件下,提升相干激光雷达反演精度和探测性能的要求。研究为高精度地实现微弱回波信号中的多普勒频移估计,获取精确的测风信息提供了可行的技术方法,由此实现的测风激光雷达探测性能提升对于深入研究大气风场、利用其实现航空航天安全保障、气象观测、风能评估等广泛应用场景也将起到重要作用。
Power spectrum analysis method of coherent Doppler lidar based on linear prediction spectrum estimation
-
摘要: 基于多普勒效应的相干激光雷达广泛应用于测风等大气探测领域,实际应用于风场观测时,由于噪声杂波干扰、回波信号较弱和风场不均匀性等影响了多普勒频移估计的精度。为准确估计激光雷达弱回波信号中的多普勒频移,提升相干测风激光雷达的探测距离和探测精度,文中开展了基于激光雷达功率谱信号的多普勒频移估计算法以及探测性能提升的评估研究。在快速傅里叶变换的基础上,提出了一种结合线性预测频谱估计与导数增强方法的功率谱分析方法,通过与常用的最大似然离散谱峰值频移估计算法(ML DSP算法)进行比较,验证了文中方法在相干测风激光雷达微弱信号频移估计过程中的优势。风速数据的时间及空间相关性分析结果表明,功率谱分析方法具有更好的风速估计稳定性,有效风场探测距离相较ML DSP算法提升了73%。与超声风速计对比结果表明,文中提出的综合算法在弱信号情况下的风速测量精度高,风速结果与超声风速计的标准偏差相较ML DSP算法降低了0.23 m/s,偏离率BIAS降低了0.3 m/s,有效提高了低信噪比范围内多普勒频移估计的精度。Abstract:
Objective In the data processing of wind field detection by coherent Doppler lidar, the Doppler frequency shift is extracted as the target for wind speed calculation, and the accuracy of Doppler frequency estimation directly affects the performance of wind field detection by coherent Doppler lidar. The accuracy of wind measurement is greatly affected by the interference of noise clutter, weakness of reflection signal, and wind field inhomogeneity, thus limiting the detection performance of the system, resulting in wind speed estimation outliers and detection range faults. The existing research on the power spectrum analysis method lacks the targeted research and multi-angle optimization attempts under the key technical limitations of weak signals. Therefore, effective peak retrieval of the power spectrum plays a decisive role in achieving accurate inversion of the wind field under the application limitation. Therefore, a power spectrum analysis method is proposed to improve the accuracy and detection performance of coherent Doppler lidar wind speed retrieval. Methods In order to improve the peak detection accuracy of the target signal under weak signal conditions and obtain the accurate frequency estimation of signal spectrum for wind speed inversion, the optimization of the frequency shift estimation algorithm and peak detection are explored. Specific optimization measures include the smoothing processing of the original power spectrum baseline: background noise removal algorithm (Fig.1-2), the resolution enhancement peak detection algorithm for the target signal (Fig.3), and the quality assessment of peak retrieval to achieve frequency estimation correction (Fig.4-5). A power spectrum analysis method based on nonlinear least squares noise fitting, combining linear prediction spectrum estimation and derivative enhancement algorithm is proposed (Fig.6). Results and Discussions The commonly used maximum likelihood discrete spectrum peak estimation algorithm based on Fast Fourier Transform and the proposed frequency estimation synthesis algorithm are respectively applied to the measured radial wind speed data of coherent Doppler lidar, and the performance of the frequency estimation synthesis algorithm is evaluated. After applying the proposed algorithm, the stability of wind speed measurement has been significantly improved, the wind speed measurement error on several far-field distance bins has been effectively reduced, and the effective detection distance of wind speed has been effectively improved in all scanning directions. Through the statistical analysis of the autocorrelation coefficient, the temporal correlation and spatial correlation of the wind speed estimation are verified (Fig.10-11). The results show that the wind speed data obtained by the proposed power spectrum analysis method maintains good spatio-temporal continuity and spatial autocorrelation characteristics. The inversion results of lidar were compared with the reference results of the ultrasonic anemometer under spatio-temporal matching (Fig.15-16), and the effectiveness of the proposed power spectrum analysis method for improving the detection performance of coherent Doppler lidar was verified. Conclusions On the basis of Fast Fourier Transform, a power spectrum analysis method based on nonlinear least squares noise fitting, combining linear prediction spectrum estimation and derivative enhancement algorithm is proposed. The algorithm has the characteristics of high noise suppressing effect, great recognition ability of weak signal, and high accuracy of wind speed estimation. The results of temporal and spatial correlation analysis of wind speed data show that the proposed power spectrum analysis method has better stability of wind speed estimation, and the effective wind field detection distance is increased by 73.13% compared with the ML DSP algorithm. The comparison results with the ultrasonic anemometer show that the proposed algorithm has high recognition accuracy in the case of weak signal. The standard deviation between the wind speed results and the ultrasonic anemometer is reduced by 0.23 m/s compared with the ML DSP algorithm, and the BIAS rate is reduced by 0.3 m/s, effectively improving the accuracy of Doppler frequency estimation in the low SNR range. -
图 2 探测距离2370 m处两种噪声剔除算法模型下的频谱估计结果对比
Figure 2. Comparison of spectrum estimation results of two noise removal algorithms at a detection distance of 2370 m
图 3 利用偶导数的峰值锐化原理进行谱峰增强前后的对比示意图
Figure 3. Comparison diagram of spectral peaks before and after enhan-cement using the peak sharpening principle of even derivatives
图 4 线性预测频谱估计算法流程
Figure 4. Flow chart of linear prediction spectrum estimation algorithm
图 5 内插法频谱估计算法处理前后对比示意图(2022-05-09 15:03:36-探测距离:14 700 m)
Figure 5. Comparison diagram of interpolation spectrum estimation algorithm before and after processing (2022-05-09 15:03:36-detection distance bin: 14700 m)
图 6 功率谱频移估计综合算法信号处理流程
Figure 6. Signal processing flow of integrated algorithm of power spectrum frequency shift estimation
图 7 (a) 三维扫描型脉冲相干多普勒激光雷达 Leice Wind3D6000;(b) 超声波风速仪Vaisala WMT700
Figure 7. (a) 3D scanning pulsed coherent Doppler lidar Leice Wind3D6000; (b) Ultrasonic anemometer Vaisala WMT700
图 8 固定扫描方向上两种频移估计模型风速评估结果对比图
Figure 8. Comparison diagram of wind speed evaluation results of two frequency shift estimation models in a fixed scanning direction
图 9 各俯仰角扫描方向上两种频移估计模型有效探测距离对比图
Figure 9. Comparison of the effective detection range of the two frequency shift estimation models in each pitch angle scanning direction
图 10 (a) 两种频移估计模型所得平均绝对风速随探测距离分布的变化;(b) 两种频移估计模型所得风速标准差随探测距离分布的变化
Figure 10. (a) Distribution of the mean absolute wind speed with the detection distance under the two frequency shift estimation models; (b) Distribution of the wind speed standard deviation with the detection distance under the two frequency shift estimation models
图 11 两种频移估计模型反演所得风速空间自相关函数随探测距离的变化
Figure 11. Variation of the spatial autocorrelation function of wind speed retrieved by two frequency shift estimation models with the detection range
图 12 沿01-19跑道方向设备布放及扫描示意图
Figure 12. Schematic diagram of equipment placement and scanning along runway 01-19
图 13 三维矢量风场及RHI扫描平面示意图
Figure 13. Schematic diagram of 3D vector wind field and RHI scanning plane
图 14 RHI扫描平面上风速矢量分解示意图
Figure 14. Schematic representation of wind speed vector decomposition on the RHI scan plane
图 15 激光雷达近场观测数据与超声风速计数据相关性分析。(a)应用ML DSP估计算法反演所得径向风速;(b)应用提出的功率谱分析方法反演所得径向风速
Figure 15. Correlation analysis of lidar near-field observation data and ultrasonic anemometer data. (a) The obtained radial wind speed retrieved by applying the maximum likelihood discrete spectrum peak estimation algorithm; (b) The obtained radial wind speed retrieved using the proposed power spectrum analysis method
图 16 激光雷达远场观测数据与超声风速计数据相关性分析。(a)应用ML DSP估计算法反演所得的径向风速;(b)应用提出的功率谱分析方法反演所得的径向风速
Figure 16. Correlation analysis of lidar far-field observation data and ultrasonic anemometer data. (a) The obtained radial wind speed retrieved by applying the maximum likelihood discrete spectrum peak estimation algorithm; (b) The obtained radial wind speed retrieved using the proposed power spectrum analysis method
图 17 垂直气流速度时空分布THI (时间-高度-强度)图
Figure 17. Time-height-intensity (THI) plot of the spatial and temporal distribution of vertical wind speed
图 18 垂直气流速度分布统计箱线图
Figure 18. Statistical box plot of vertical airflow velocity distribution
图 19 激光雷达风场有效探测距离的时间分布图
Figure 19. Temporal distribution of effective detection range of lidar in wind field measurement
表 1 相干多普勒激光雷达设备性能参数
Table 1. Device performance parameters of coherent Doppler lidar
Index Parameter Pulse wavelength/nm 1550 Pulse energy/μJ 150 Pulse width/ns 300 Pulse repetition frequency/kHz 10 Radial range resolution/m 30 Radial measuring range/m 60-4000 Accuracy of wind speed/m·s−1 <0.1 Power consumption/W 200 Scanner positioning accuracy/(°) <0.1  下载: 导出CSV
下载: 导出CSV
表 2 超声风速计Vaisala WMT700设备技术参数
Table 2. Equipment technical parameters of ultrasonic anemometer Vaisala WMT700
Index Parameter Wind speed measurement range/m·s−1 0-40 Accuracy of wind speed/m·s−1 ±0.1 Wind speed resolution/m·s−1 0.01 Response time/ms 250 Wind direction measurement range/(°) 0-360 Accuracy of wind direction/(°) ±2 Wind direction resolution/(°) 0.01
下载: 导出CSV
-
[1] Targ R, Kavaya M J, Huffaker R M, et al. Coherent lidar airborne wind shear sensor: performance evaluation [J]. Applied Optics, 1991, 30(15): 2013-2026. doi: 10.1364/AO.30.002013 [2] Targ R, Steakley B C, Hawley J G, et al. Coherent lidar airborne wind sensor II: flight-test results at 2 and 10 μm [J]. Applied Optics, 1996, 35(36): 7117-7127. doi: 10.1364/AO.35.007117 [3] Wu S, Liu B, Liu J, et al. Wind turbine wake visualization and characteristics analysis by Doppler lidar [J]. Optics Express, 2016, 24(10): A762-A780. doi: 10.1364/OE.24.00A762 [4] 崔朝龙,黄宏华,陶宗明,饶瑞中.光强闪烁激光雷达的背景噪声分析[J].量子电子学报,2013,30(5):628-634 doi: 10.3969/j.issn.1007-5461.2013.05.019 Cui Chaolong, Huang Honghua, Tao Zongming, et al. Analysis of noise in residual turbulent scintillation lidar [J]. Chinese Journal of Quantum Electronics, 2013, 30(5): 628-634. (in Chinese) doi: 10.3969/j.issn.1007-5461.2013.05.019 [5] Frehlich R. Simulation of coherent Doppler lidar performance in the weak-signal regime [J]. Journal of Atmospheric and Oceanic Technology, 1996, 13(3): 646-658. doi: 10.1175/1520-0426(1996)013<0646:SOCDLP>2.0.CO;2 [6] Zarader J L, Ancellet G, Dabas A, et al. Performance of an adaptive notch filter for spectral analysis of coherent lidar signals [J]. Journal of Atmospheric and Oceanic Technology, 1996, 13(1): 16-28. doi: 10.1175/1520-0426(1996)013<0016:POAANF>2.0.CO;2 [7] Dabas A M. Semiempirical model for the reliability of a matched filter frequency estimator for Doppler lidar [J]. Journal of Atmospheric and Oceanic Technology, 1999, 16(1): 19-28. doi: 10.1175/1520-0426(1999)016<0019:SMFTRO>2.0.CO;2 [8] Dabas A M, Philippe D, Pierre H F, et al. Adaptive filters for frequency estimate of heterodyne Doppler lidar returns: Recursive implementation and quality control [J]. Journal of Atmospheric and Oceanic Technology, 1999, 16(3): 361-372. doi: 10.1175/1520-0426(1999)016<0361:AFFFEO>2.0.CO;2 [9] Dabas A M, Philippe D, Pierre H F, et al. Velocity biases of adaptive filter estimates in heterodyne Doppler lidar measure-ments [J]. Journal of Atmospheric and Oceanic Technology, 2000, 17(9): 1189-1202. doi: 10.1175/1520-0426(2000)017<1189:VBOAFE>2.0.CO;2 [10] 李路, 郭磐, 张寅超, 陈思颖, 陈和. 先验平滑方法在相干测风激光雷达中的应用[J]. 光学学报, 2015, 35(07): 353-361. doi: 10.3788/AOS201535.0728001 Li Lu, Guo Pan, Zhang Yinchao, et al. Application of smoothness prior aproach for coherent Doppler wind lidar [J]. Acta Optica Sinica, 2015, 35(7): 0728001. (in Chinese) doi: 10.3788/AOS201535.0728001 [11] 生雪莉, 穆梦飞, 殷敬伟, 杨超然, 刘婷. 基于稀疏分解的水下运动目标多普勒频移估计方法[J]. 哈尔滨工程大学学报, 2020, 41(10): 1429-1435. doi: 10.11990/jheu.202007055 Sheng Xueli, Mu Mengfei, Yin Jingwei, et al. Sparse decomposition-based estimation method of Doppler frequency shift of underwater moving target [J]. Journal of Harbin Engineering University, 2020, 41(10): 1429-1435. (in Chinese) doi: 10.11990/jheu.202007055 [12] 王亚萍, 胡辽林, 王斌. 基于数字滤波的光纤光栅传感信号去噪及其FPGA实现[J]. 西安理工大学学报, 2015, 31(01): 95-99. Wang Yaping, Hu Liaolin, Wang Bin. Denoising of fiber Bragg grating sensing signal and implementation by FPGA based on digital filtering [J]. Journal of Xi'an University of Technology, 2015, 31(1): 95-99. (in Chinese) [13] 曹京京, 胡辽林, 赵瑞. 一种改进小波阈值函数的光纤光栅传感信号去噪方法[J]. 传感技术学报, 2015, 28(04): 521-525. doi: 10.3969/j.issn.1004-1699.2015.04.012 Cao Jingjing, Hu Liaolin, Zhao Rui. Improved threshold de-noising method of fiber Bragg grating sensor signal based on wavelet transform [J]. Chinese Journal of Sensors and Actuators, 2015, 28(4): 521-525. (in Chinese) doi: 10.3969/j.issn.1004-1699.2015.04.012 [14] Manie Y C, Li J W, Peng P C, et al. Using a machine learning algorithm integrated with data de-noising techniques to optimize the multipoint sensor network [J]. Sensors, 2020, 20(4): 1070. doi: 10.3390/s20041070 [15] Chen Y, Wu C T, Liu H L. EMD self-adaptive selecting relevant modes algorithm for FBG spectrum signal [J]. Optical Fiber Technology, 2017, 36(7): 63-67. doi: https://doi.org/10.1016/j.yofte.2017.02.008 [16] Zrnic D S. Estimation of spectral moments for weather echoes [J]. IEEE Transactions on Geoscience Electronics, 1979, 17(4): 113-128. doi: 10.1109/TGE.1979.294638 [17] Rye B J, Hardesty R. Discrete spectral peak estimation in incoherent backscatter heterodyne lidar. I. Spectral accumulation and the Cramer-Rao lower bound [J]. IEEE Transactions on Geoscience and Remote Sensing, 1993, 31(1): 16-27. doi: 10.1109/36.210440 [18] Siegman A. The antenna properties of optical heterodyne receivers [J]. Proceedings of the IEEE, 1966, 54(10): 1350-1356. doi: 10.1109/PROC.1966.5122 [19] Frehlich R, Stephen M H, Sammy W H, et al. Coherent Doppler lidar measurements of winds in the weak signal regime [J]. Applied Optics, 1997, 36(15): 3491-3499. doi: 10.1364/AO.36.003491 [20] Van Trees H L, Bell K L. Detection Estimation and Modulation Theory, Part I: Detection, Estimation, and Filtering Theory[M]. 2nd ed. Hoboken, New Jersey: Wiley, 2013. [21] 秦文婕. 光纤布拉格光栅传感性能提升的信号处理方法研究[D]. 北京: 华北电力大学, 2021. Qing Wenjie. Research on signal processing methods for improving fiber bragg grating sensing performance[D]. Beijing: North China Electric Power University, 2021. (in Chinese) [22] Beyon J Y, Koch G J, Li Z. Noise normalization and windowing functions for VALIDAR in wind parameter estimation[C]//Defense and Security Symposium: 2006. International Society for Optics and Photonics, 2006, 6214: 621404. [23] Zhai X, Wu S, Liu B, et al. Shipborne wind measurement and motion-induced error correction by coherent Doppler lidar over yellow sea in 2014 [J]. Atmospheric Measurement Techniques, 2018, 11(3): 1313-1314. doi: https://doi.org/10.5194/amt-11-1313-2018 [24] Wahab M F, O’haver T C, Gritti F. Increasing chromatographic resolution of analytical signals using derivative enhancement approach [J]. Talanta, 2019, 192(1): 492-499. doi: 10.1016/j.talanta.2018.09.048 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 70
- HTML全文浏览量: 36
- PDF下载量: 32
- 被引次数: 0

