









-
随着光学制造技术的广泛发展,光学检测技术也广泛发展起来。高精度光学元件及系统在航空、极紫外光刻等领域的应用,使得光学检测技术面临了前所未有的挑战。干涉测量作为高精度的检测手段,广泛应用于各种光学元件及系统的测试,尤其是随着相移干涉技术的发明,精度高、速度快成为干涉技术的代名词[1-2]。最开始的相移干涉技术是定步长的,虽然精度较高,但是对干涉仪硬件和周围环境要求太高,相位计算精度取决于相移精度。随机相移算法能够解除对相移精度的限制,对其进行研究具有重要的意义。
随机相移算法可以分为迭代算法和非迭代算法,也可以分为两步算法和多步算法。由于相移干涉图的光强表达式中未知数较多,一般情况下想要求解相位至少需要三幅干涉图,因此发展了许多多步随机相移算法,其中有两种算法比较经典,一种是2004年Wang等人提出的基于最小二乘法的先进迭代算法(AIA),它解决了帧-帧之间迭代和像素-像素之间迭代的分离的限制,极大地提高了精度[3]。另一种是2011-2017年,Vargas等人提出的一系列基于主成分分析法(PCA)的相移算法,它将一组可能相关的变量转换为一组不相关的变量值,该算法是非迭代算法,计算速度快[4-6]。多步算法虽然精度高,但是图像采集时间及计算时间长,不适合光学加工过程中的在线检测。
为了减少图像采集时间及计算时间,发展了很多经典的两步随机相移算法。2012年,Vargas等人提出了格兰-施密特正交化法(GS),该算法不需要相移估计,速度快且易于运行[7]。2014年,Luo提出采用菱形对角线向量的正交性计算相位和相移的方法(DDV)[8]。2015年,Niu提出一种计算相移干涉图内积的商从而计算相移的算法(QIP)[9]。2018年,Cheng提出通过求解四次多项式方程得到相移的方法(QPE)[10]。因为QIP和QPE计算的是相移值的余弦,因此相移范围被限制在[0,π]之间。2019年,Cheng又提出了通过搜索调制幅度的最小变化系数从而求得相移的方法(CVM)[11]。上面的算法有一个共同的特点,它们在计算相位之前需要采用滤波算法将背景光强滤掉。然而,滤波算法除了滤除背景光强,还可能引入滤波误差,会影响相位计算精度。
为了避免上述情况,很多非滤波的两步随机相移算法发展起来,也可以分为两大类别,一种是李萨如椭圆拟合法。1992年,Farrell采用了李萨如椭圆拟合法(LEF)计算了待测相位[12]。2019年,笔者将GS、PCA和LEF进行了结合,精度较前面的滤波两步随机相移算法有较大提升,但是LEF花费的时间相对较长[13-14]。另一种是最小二乘法。2019年,笔者将干涉图的和差欧式矩阵范数(EMNSD)计算出来的相位作为初值,采用快速最小二乘法(FLSA)计算出来精确的相位,花费时间较少[15]。2018年,笔者还将LEF和最小二乘法组合成了一种新的算法,LEF计算出来的相位作为初值,采用最小二乘法计算出了更精确的相位[16]。虽然LEF和最小二乘法都能够实现高精度的相位计算,但是花费时间较多,对光学在线检测不利,因此设计一个没有滤波的、简便的、快速的、高精度的两步随机相移算法迫在眉睫。
针对上述要求,文中设计了一个基于PCA和VU分解法的两步随机相移算法,采用两步PCA计算出来的相位作为迭代初值,扩展干涉图,构造扩展干涉图矩阵,采用VU分解、迭代计算出精确的相位。无论PCA还是VU分解都是简单的矩阵运算,花费时间较少,而且没有滤波的干涉图参与到VU分解运算当中,极大地提升了相位计算精度,该算法易于操作,花费时间少,精度高,在高精度光学在线检测领域将有广泛的应用前景。
-
一般的PCA需要三幅以上相移值等间隔分布于[0,2π]的干涉图,对于两幅相移干涉图,无法通过减去多幅干涉图的平均值去除背景光强求出主成分,从而求出待测相位。针对两幅相移干涉图,设计了一种两步PCA。
两幅相移干涉图的光强表达式可以写成:
$$ \begin{split} {I_{i,1}} &= {a_i} + {b_i}\cos \left( {{\varphi _i} + {\delta _1}} \right)= \\ & {a_i} + {b_i}\cos {\varphi _i}\cos {\delta _1} - {b_i}\sin {\varphi _i}\sin {\delta _1} \end{split} $$ (1) $$ \begin{split} {I_{i,2}} &= {a_i} + {b_i}\cos \left( {{\varphi _i} + {\delta _2}} \right)= \\ &{a_i} + {b_i}\cos {\varphi _i}\cos {\delta _2} - {b_i}\sin {\varphi _i}\sin {\delta _2} \end{split} $$ (2) 式中:$ {a_i} $为背景光强;$ {b_i} $为调制幅度;$ {\varphi _i} $为待测相位;$ {\delta _1} $和$ {\delta _2} $为两幅干涉图的相移值;$ i $为像素序号,$i = 1,2, \cdots ,M$,$ M $为干涉图的像素总数。
采用高通滤波器去除背景光强,并且令${\delta }_{1}\text{=} 0, {\delta }_{2}\text{=}\delta$简化光强表达式,滤波后的干涉图光强表达式为:
$$ {\tilde I_{i,1}} = {b_i}\cos {\varphi _i} $$ (3) $$ {\tilde I_{i,2}} = {b_i}\cos {\varphi _i}\cos \delta - {b_i}\sin {\varphi _i}\sin \delta $$ (4) 采用滤波后的两幅干涉图构造矩阵$ Q $:
$$ Q{\text{ = }}\left[ {\begin{array}{*{20}{c}} {{{\tilde I}_{1,1}}}&{{{\tilde I}_{2,1}}} \\ {{{\tilde I}_{1,2}}}&{{{\tilde I}_{2,2}}} \end{array}\;\;\;\;\begin{array}{*{20}{c}} \cdots &{{{\tilde I}_{M,1}}} \\ \cdots &{{{\tilde I}_{M,2}}} \end{array}} \right] $$ (5) 两个滤波干涉图光强值的协方差矩阵为:
$$ C = Q{Q^{\rm{T}}}{\text{ = }}\left[ {\begin{array}{*{20}{c}} {\displaystyle\sum\limits_{i = 1}^M {{{\tilde I}^2}_{i,1}} }&{\displaystyle\sum\limits_{i = 1}^M {{{\tilde I}_{i,1}} \cdot {{\tilde I}_{i,2}}} } \\ {\displaystyle\sum\limits_{i = 1}^M {{{\tilde I}_{i,1}} \cdot {{\tilde I}_{i,2}}} }&{\displaystyle\sum\limits_{i = 1}^M {{{\tilde I}^2}_{i,2}} } \end{array}} \right] $$ (6) 将协方差矩阵对角化,得到:
$$ D = HC{H^{\rm{T}}} $$ (7) 式中:$ H{\text{ = }}\left[ {\begin{array}{*{20}{c}} 1&0 \\ {-{{{C_{1,2}}} \mathord{\left/ {\vphantom {{{C_{1,2}}} {{C_{1,1}}}}} \right. } {{C_{1,1}}}}}&1 \end{array}} \right] $。
主成分可以利用公式(8)计算:
$$ \begin{split} y &= HQ = \left[ {\begin{array}{*{20}{c}} 1&0 \\ { - {{{C_{1,2}}} \mathord{\left/ {\vphantom {{{C_{1,2}}} {{C_{1,1}}}}} \right. } {{C_{1,1}}}}}&1 \end{array}} \right]\left[ {\begin{array}{*{20}{c}} {{{\tilde I}_{i,1}}} \\ {{{\tilde I}_{i,2}}} \end{array}} \right] = \\ & \left[ {\begin{array}{*{20}{c}} {{{\tilde I}_{i,1}}} \\ {{{\tilde I}_{i,2}} - {{{C_{1,2}}} \mathord{\left/ {\vphantom {{{C_{1,2}}} {{C_{1,1}}{{\tilde I}_{i,1}}}}} \right. } {{C_{1,1}}{{\tilde I}_{i,1}}}}} \end{array}} \right] \end{split} $$ (8) $ {{{C_{1,2}}} \mathord{\left/ {\vphantom {{{C_{1,2}}} {{C_{1,1}}}}} \right. } {{C_{1,1}}}} $可以通过公式(9)计算:
$$ {{{C_{1,2}}} \mathord{\left/ {\vphantom {{{C_{1,2}}} {{C_{1,1}}{\text{ = }}\frac{{\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}\cos \delta } }}{{\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}} }}}}} \right. } {{C_{1,1}}{\text{ = }}\frac{{\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}\cos \delta } }}{{\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}} }}}} = \cos \delta $$ (9) 将公式(9)代入公式(8)得到:
$$ {y_{i,1}} = {b_i}\cos {\varphi _i} $$ (10) $$ {y_{i,2}} = - {b_i}\sin {\varphi _i}\sin \delta $$ (11) 为了最终求得待测相位,对公式(10)和公式(11)进行归一化:
$$ {\tilde y_{i,1}} = {{{{\tilde y}_{i,1}}} \mathord{\left/ {\vphantom {{{{\tilde y}_{i,1}}} {\left\| {{y_1}} \right\|}}} \right. } {\left\| {{y_1}} \right\|}} = \frac{{{b_i}\cos {\varphi _i}}}{{\sqrt {\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}} } }} $$ (12) $$ {\tilde y_{i,2}} = {{{{\tilde y}_{i,2}}} \mathord{\left/ {\vphantom {{{{\tilde y}_{i,2}}} {\left\| {{y_2}} \right\|}}} \right. } {\left\| {{y_2}} \right\|}} = \frac{{{b_i}\sin {\varphi _i}}}{{\sqrt {\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\sin }^2}{\varphi _i}} } }} $$ (13) 当干涉图中的条纹数量大于1,意味着相位分布超过一个相位周期,因此有如下近似:
$$\begin{split} &\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}} -\displaystyle\sum\limits_{i = 1}^M {{b^2}_i{{\sin }^2}{\varphi _i}} = \\ &\quad \displaystyle\sum\limits_{i = 1}^M {{b^2}_i\cos 2{\varphi _i}} \approx 0 \end{split} $$ (14) 然后,
$$ \sum\limits_{i = 1}^M {{b^2}_i{{\sin }^2}{\varphi _i}} \approx \sum\limits_{i = 1}^M {{b^2}_i{{\cos }^2}{\varphi _i}} $$ (15) 最终,待测相位通过反正切函数计算出来。
$$ {\varphi _i} = {\arctan ^{ - 1}}\left( {{{{{\tilde y}_{i,2}}} \mathord{\left/ {\vphantom {{{{\tilde y}_{i,2}}} {{{\tilde y}_{i,1}}}}} \right. } {{{\tilde y}_{i,1}}}}} \right) $$ (16) -
上面的两步PCA非常简便,可以很快得到待测相位值,但是滤波带来的误差会影响待测相位的计算精度,因此下面以两步PCA计算的相位作为迭代初始相位值,设计无须滤波的VU分解法进一步提高相位求解精度。
笔者将两幅相移干涉图的光强用一个表达式来表示:
$$\begin{split} {I_{i,j}} &= {a_i} + {b_i}\cos \left( {{\varphi _i} + {\delta _j}} \right)= \\ & {a_i} + {b_i}\cos {\varphi _i}\cos {\delta _j} - {b_i}\sin {\varphi _i}\sin {\delta _j} \end{split} $$ (17) 式中:$ j $为干涉图序号,$j=1,2,\cdots ,N$,$ N $为干涉图的总数,文中$ N{\text{ = }}2 $。
采用两幅干涉图的光强构造一个矩阵:
$$ I = {{V}}{{{U}}^{\rm{T}}} = \left( {\begin{array}{*{20}{c}} {{a}}&{{c}}&{ - {{s}}} \end{array}} \right)\left( {\begin{array}{*{20}{c}} {{{{1}}^{\rm{T}}}} \\ {{{{u}}^{\rm{T}}}} \\ {{{{v}}^{\rm{T}}}} \end{array}} \right) $$ (18) 式中:${{V}} = \left( {\begin{array}{*{20}{c}} {{a}}&{{c}}&{ - {{s}}} \end{array}} \right)$;${{U}} = \left( {\begin{array}{*{20}{c}} {{1}}&{{u}}&{{v}} \end{array}} \right)$;$ {{a}} = \left\{ {{a_i}} \right\} $; $ {{c}} = \left\{ {{b_i}\cos {\varphi _i}} \right\} $;$ {{s}} = \left\{ {{b_i}\sin {\varphi _i}} \right\} $; $ {{u}}{\text{ = }}\left\{ {\cos {\delta _j}} \right\} $;$ {{v}}{\text{ = }}\left\{ {\sin {\delta _j}} \right\} $。
假如已知相移值$ {\delta _j} $,可以通过下式求出矩阵$ V $,从而求出待测相位:
$$ V = IU{\left( {{U^{\rm{T}}}U} \right)^{ - 1}} $$ (19) 然而,$ {U^{\rm{T}}}U $只有当$ N \geqslant 3 $时才可逆,$ N{\text{ = 2}} $时有奇异矩阵,因此两幅干涉图无法进行VU分解,下面采用扩展干涉图的方法克服矩阵的奇异性。
$$ \begin{split} &{G_{i,1}} = {a_{i,1}} \\ &{G_{i,2}} = {a_{i,2}} \\ &{G_{i,3}} = {a_{i,1}} + {b_i}\cos {\varphi _i}\cos {\delta _1} - {b_i}\sin {\varphi _i}\sin {\delta _1} \\ &{G_{i,4}} = {a_{i,2}} + {b_i}\cos {\varphi _i}\cos {\delta _2} - {b_i}\sin {\varphi _i}\sin {\delta _2} \end{split} $$ (20) 式中:$ {G_{i,1}} $和$ {G_{i,2}} $来自于采集的两幅干涉图光强$ {G_{i,3}} $和$ {G_{i,4}} $。具体地来说,就是将采集到的两幅干涉图进行低通滤波,得到两幅干涉图的背景光强,作为$ {G_{i,1}} $和$ {G_{i,2}} $,由滤波得到的背景光强和两幅干涉图光强共同构成矩阵$ G $,下面将矩阵进行重写:
$$ G{{ = V}}{{{U}}^{\rm{T}}} = \left( {{{{a}}_1}}\quad{{{{a}}_2}}\quad{{c}}\quad{ - {{s}}} \right)\left( {\begin{array}{*{20}{c}} 1&0&1&0 \\ 0&1&0&1 \\ 0&0&{\cos {\delta _1}}&{\cos {\delta _2}} \\ 0&0&{\sin {\delta _1}}&{\sin {\delta _2}} \end{array}} \right) $$ (21) 式中:${{V}} = \left( {\begin{array}{*{20}{c}} {{{{a}}_1}}\;\;{{{{a}}_2}}\;\;{{c}}\;\;{ - {{s}}} \end{array}} \right)$;${{U}} = \left( {\begin{array}{*{20}{c}} 1 & 0 & 0 & 0 \\ 0 & 1 & 0 & 0 \\ 1 & 0 & {\cos {\delta _1}} & {\sin {\delta _1}} \\ 0 & 1 & {\cos {\delta _2}} & {\sin {\delta _2}} \end{array}} \right)$;$ {{{a}}_1} = \left\{ {{a_{i,1}}} \right\} $;$ {{{a}}_2} = \left\{ {{a_{i,2}}} \right\} $;$ {{c}} = \left\{ {{b_i}\cos {\varphi _i}} \right\} $;$ s = \left\{ {{b_i}\sin {\varphi _i}} \right\} $。
注意上面的讨论中,假设两幅干涉图的背景光强不同,$ {a_{i,1}} \ne {a_{i,2}} $,在实际实验中,对于不同的干涉图和不同的像素,背景光强都是不同的,如此设计算法可以提高相位计算精度。而在VU分解法中,设计调制幅度$ {b_i} $只和像素位置有关,与干涉图序号无关,主要是方便相位计算。另外,$ {b_i} $既可以放在矩阵$ V $中,也可以放在矩阵$ U $中,所在位置并不影响VU分解。
经过干涉图扩展后,$ {U^{\rm{T}}}U $不再是奇异矩阵,能够求解逆矩阵。
假设已知矩阵$ U $,通过矩阵运算可以求出矩阵$ V $:
$$ V = GU{B^{ - 1}} $$ (22) 式中:$ B = {U^{\rm{T}}}U $。
同理,如果已知矩阵$ V $,也可以很容易计算出来矩阵$ U $:
$$ {U^{\rm{T}}} = {A^{ - 1}}{V^{\rm{T}}}G $$ (23) 式中:$ A = {V^{\rm{T}}}V $。
下面介绍一下VU分解法求解相位的具体流程:
1)先采用低通滤波法求出两幅干涉图的背景光强,然后构造矩阵$ G $;
2)利用两步PCA计算出来的相位值作为迭代初值,得到初始化矩阵$ {V_0} $;
3)求出矩阵$ {A_0} = {V_0}^{\rm{T}}{V_0} $,然后求出$ {U_0}^{\rm{T}} = {A_0}^{ - 1}{V_0}^{\rm{T}}G $;
4)利用$ {U_0} $求出$ {B_0} = {U_0}^{\rm{T}}{U_0} $,然后求出$ {V_1} = G{U_0}{B_0}^{ - 1} $;
5)根据$ {V_1} $求出第一次迭代的相位值$ {\tilde \varphi _1}{\text{ = }} {\arctan ^{ - 1}}\left( { - {V_{1(:,4)}}/{V_{1(:,3)}}} \right) $;
6)令$ {V_{1(:,3)}}{\text{ = }}\cos {\tilde \varphi _1} $,${V_{1(:,4)}}{\text{ = }}-\sin \left( {{{\tilde \varphi }_1}} \right)$,更新矩阵$ {V_1} $;
7)依次类推,不断迭代,$ {A_{k - 1}} = {V_{k - 1}}^{\rm{T}}{V_{k - 1}} $,$ {U_{k - 1}}^{\rm{T}} = {A_{k - 1}}^{ - 1}{V_{k - 1}}^{\rm{T}}G $,$ {B_{k - 1}} = {U_{k - 1}}^{\rm{T}}{U_{k - 1}} $,$ {V_k} = G{U_{k - 1}}{B_{k - 1}}^{ - 1} $,直到满足收敛条件$ {E_k} = \sqrt {{{\displaystyle\sum\limits_{i = 1}^M {{{\left( {{{\tilde \phi }_{i,k}} - {{\tilde \phi }_{i,k - 1}}} \right)}^2}} } \mathord{\left/ {\vphantom {\displaystyle{\sum\limits_{i = 1}^M {{{\left( {{{\tilde \phi }_{i,k}} - {{\tilde \phi }_{i,k - 1}}} \right)}^2}} } M}} \right. } M}} < \xi $,求出最终相位为$ {\tilde \varphi _k}{\text{ = }}{\arctan ^{ - 1}}\left( { - {V_{k(:,4)}}/{V_{k(:,3)}}} \right) $。$ k $为迭代次数,$ k=1,2,\cdots $。
在步骤4)中,调制幅度$ {b_i} $将存在于矩阵$ V $中,而在步骤6)中,当完成矩阵$ V $更新后,调制幅度$ {b_i} $将存在于矩阵$ U $中,随着迭代过程的进行,$ {b_i} $在矩阵$ V $和$ U $中轮换,正是由于矩阵$ V $的不断更新和$ {b_i} $在矩阵$ V $和$ U $中的不断轮换,迭代才能向正确方向收敛。
-
选择了两步随机相移算法中性能良好的GS[14]、CVM[18]及EMNSD&FLSA[22]与文中求取迭代初值的两步PCA(PCA2)及设计的基于主成分分析和VU分解法的两步相移算法(PCA&VU)进行对比,文中将模拟对比不同类型条纹、不同信噪比的噪声、不同相移值、不同条纹数量等对不同算法的影响,并对比各种算法的计算时间,文中计算机的CPU为Intel(R) Core(TM) i5-8265 U,内存为8 GB。
首先,模拟了圆条纹和不规则条纹干涉图,相位表达式分别为$ \varphi = 5{\text{π }}\left( {{x^2} + {y^2}} \right) $和$ \varphi = 4{\textit{π}} \left( {{x^2}{\text{ + }}{y^2} + {x^3} + {y^3}} \right) +$$4\left[ \begin{array}{l}3{\left( {1 - x} \right)^2}{{\rm{e}}^{ - {x^2} - {{\left( {y + 1} \right)}^2}}} - 10\left( {\dfrac{1}{5}x - {x^3} - {y^5}} \right){{\rm{e}}^{ - {x^2} - {y^2}}}\\ - \dfrac{1}{3}{{\rm{e}}^{ - {{\left( {x + 1} \right)}^2} - {y^2}}}\end{array} \right]$,理论相位分布图如图1(a)和(b)所示。实际情况中,无论是背景光强还是调制幅度都随着干涉图序号和像素序号变化,为了使得模拟更接近于实际情况,设计两幅干涉图的背景光强表达式为${a_i}\left( {x,y} \right) = {R_a}\exp \left[ { - 0.02\left( {{x^2} + {y^2}} \right)} \right]$,调制幅度表达式为$ {b_i}\left( {x,y} \right) = {R_b}\exp \left[ { - 0.02\left( {{x^2} + {y^2}} \right)} \right] $,其中两幅干涉图的$ {R_a} $分别为1和0.95,两幅干涉图的$ {R_b} $分别为0.95和0.9。在干涉图中加入信噪比为20 dB的噪声,两幅相移干涉图相移值设为1 rad,干涉图像素数为401 pixel×401 pixel,圆条纹和不规则条纹干涉图如图1(c)和(d)所示。文中GS、CVM和PCA2采用高斯高通滤波去除背景光强,去除背景光强的干涉图如图1(e)和(f)所示,由此可以看出,滤波仅仅去除了背景光强,并没有去除噪声。

图 1 模拟相位分布图、干涉图和高斯高通滤波后干涉图。 (a)、(b)圆条纹和不规则条纹对应的理论相位分布图;(c)、(d)圆条纹和不规则条纹干涉图;(e)、(f)高斯高通滤波后的圆条纹和不规则条纹干涉图
Figure 1. Simulated phase distributions, interferograms and interferograms after Gaussian high-pass filtering. (a), (b) Theoretical phase distributions corresponding to the circular and complex fringes; (c), (d) Interferograms with circular and complex fringes; (e), (f) Interferograms with circular and complex fringes after Gaussian high-pass filtering
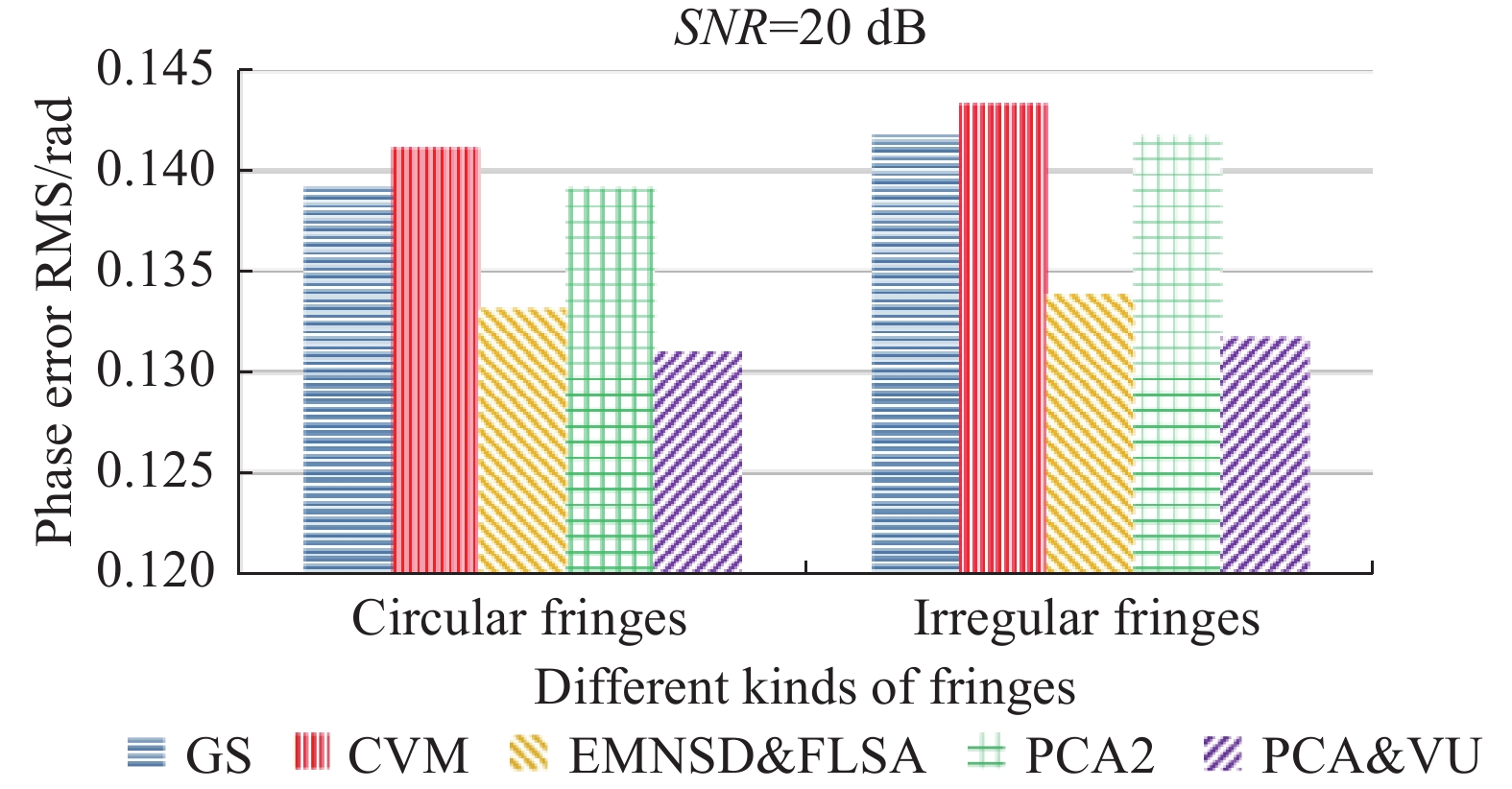
采用GS、CVM、EMNSD&FLSA及PCA2和文中设计的PCA&VU计算的圆条纹和不规则条纹的相位误差图如图2所示。图3采用柱形图比较了不同相移算法的相位误差RMS值。可以看出,对于圆条纹和不规则条纹,结论是一样的。GS和PCA2精度一致。CVM算法精度是五种算法中精度最低的,因为背景光强、调制幅度误差及噪声都会影响相移值的寻找。EMNSD&FLSA和PCA&VU精度比较高,主要有两个原因:一是两种算法都没有采用滤波算法去除背景光强。虽然PCA&VU利用滤波的干涉图计算出来的相位作为迭代初值,但是最终相位是利用VU分解法采用没有滤波的干涉图直接计算出来的;另一个原因是两种算法都是迭代算法。虽然EMNSD&FLSA和PCA&VU都是迭代算法,但是也有精度高低之分,文中设计的PCA&VU算法精度比EMNSD&FLSA更高,因为VU分解法考虑了两幅相移干涉图的背景光强不一致问题。
除了算法的精度,计算时间也是考查算法性能的重要因素之一。笔者对五种算法的计算时间在表1中进行了对比,可以看出GS和PCA2花费的时间最少,因为这两种算法没有迭代,算法简便。而CVM虽然没迭代,但是搜索相移值的过程花费时间较多,因此花费的时间最多。EMNSD&FLSA虽然是迭代算法,但由于选取部分数据点进行迭代计算,花费的时间也不算过多。PCA&VU中PCA花费时间较少,VU分解法的迭代计算花费了相对较多的时间,总时间虽然比GS和PCA2多,但是还不足EMNSD&FLSA一半时间,作为一个精度较高的迭代算法,401 pixel×401 pixel花费的时间还不足0.05 s,可以作为高精度的在线检测算法。
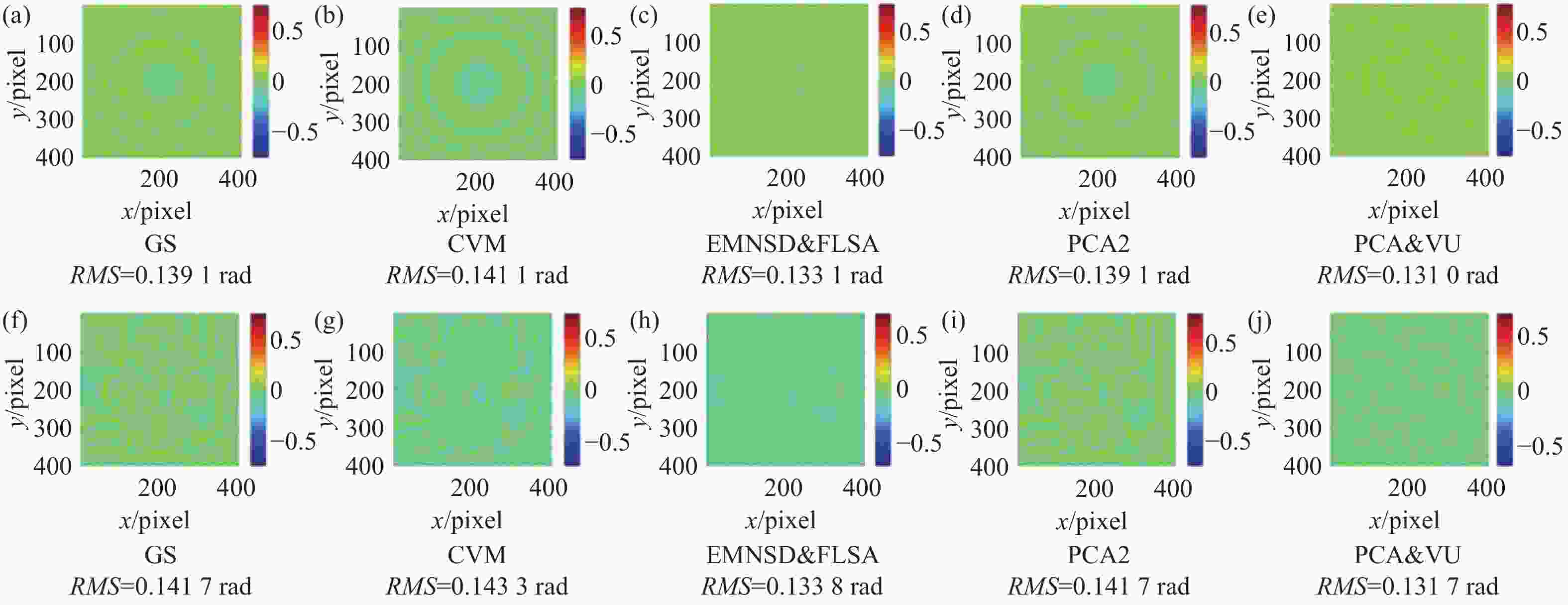
图 2 不同相移算法的相位误差分布图。(a)~(e)圆条纹的相位误差分布图;(f)~(j)不规则条纹的相位误差分布图
Figure 2. Phase error distributions of different phase-shifting algorithms. (a)-(e) Phase error distributions of circular fringes; (f)-(j) Phase error distributions of irregular fringes
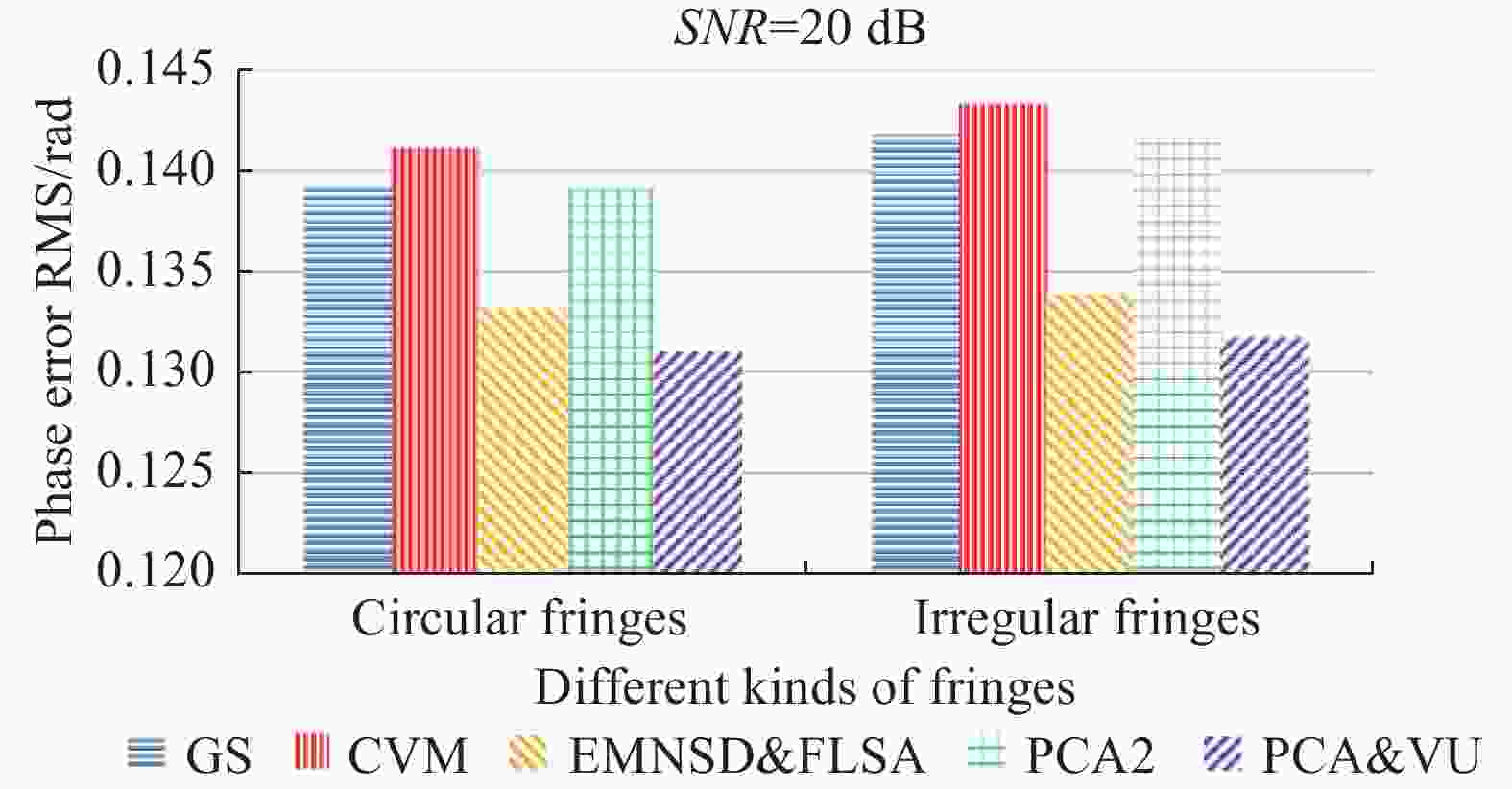
图 3 针对不同类型条纹,不同相移算法的相位误差RMS值 (20 dB)
Figure 3. Phase errors RMS of different phase-shifting algorithms with different types of fringes (20 dB)
表 1 模拟计算时间
Table 1. Computational time in the simulation
PSA GS CVM EMNSD&FLSA PCA2 PCA&VU Time/s 0.011 2.328 0.119 0.011 PCA 0.011 VU 0.035 Total 0.046 前面对五种算法的对比主要考虑了不理想的背景光强、调制幅度及噪声等因素,确切地说考查的是不同算法对不理想的背景光强、调制幅度及噪声的敏感程度或抑制能力。为了单纯地判断五种算法自身的精度,采用理想的背景光强、调制幅度模拟了两幅圆条纹和不规则条纹相移干涉图,并且没有在干涉图中加入噪声,最终相位误差RMS值对比结果如图4所示。可以看出,EMNSD&FLSA和PCA&VU没有相位误差,而GS、CVM和PCA2对应的相位误差RMS值虽然远小于非理想情况,但是仍然存在,这些误差来自于滤波误差和算法本身的误差。高斯滤波精度较高,但是任何滤波算法都有误差,因此需要滤除背景的相移算法都很难实现高精度的相位计算。另外,CVM精度略高于GS、PCA2,而在前面的非理想情况下,CVM精度低于GS、PCA2,说明了CVM对背景光强、调制幅度、噪声等误差的抑制能力相对较差,而算法自身精度却比较高。

图 4 理想情况下,针对不同类型条纹,不同相移算法的相位误差RMS值
Figure 4. Phase errors RMS of different phase-shifting algorithms with different types of fringes in the ideal case
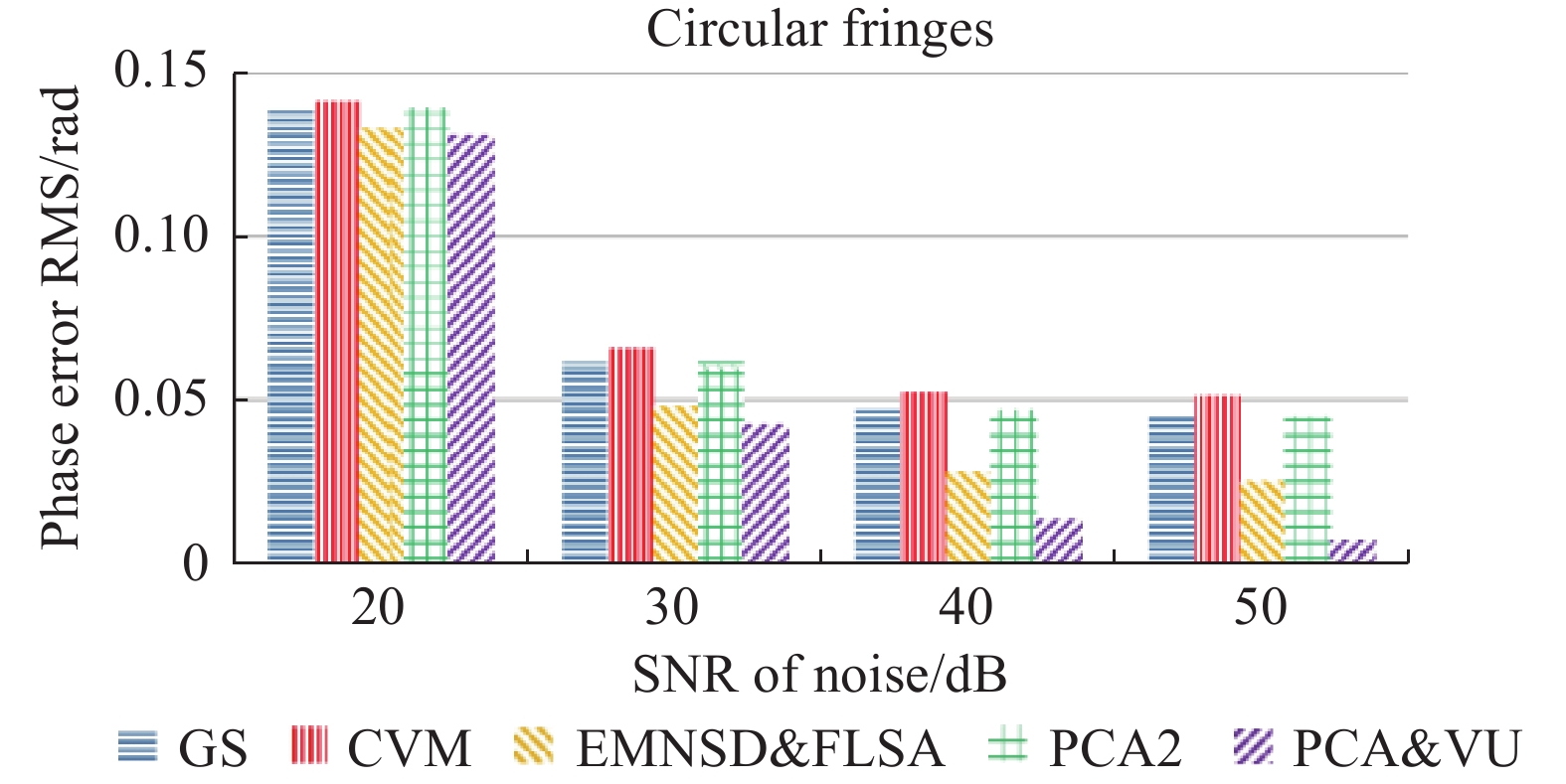
为了分析不同的噪声对五种算法的影响,在圆条纹的干涉图中分别添加了20 dB、30 dB、40 dB及50 dB的噪声,结果如图5所示。五种算法在任何噪声下都是有效的,无论对于哪种算法,都是噪声越大,相位误差越大。当噪声信噪比大于40 dB时,相位误差变化较小。对于任何信噪比的噪声,都是PCA&VU相位误差最小,其次是EMNSD&FLSA,第三是GS和PCA2,误差最大的是CVM。另外,当噪声信噪比为20 dB时,五种算法的相位误差相差不多。随着信噪比的增大,相位误差的差别越来越大,尤其当噪声大于40 dB时,PCA&VU和EMNSD&FLSA的优势更加明显,主要原因是它们没有滤波过程,在完美条件下,理论上可以得到完全正确的相位,因此噪声越小,精度就会有显著提高,而其他算法除了算法自身的误差外,还有滤波误差存在,无论噪声多么小,都会存在一定的相位误差。
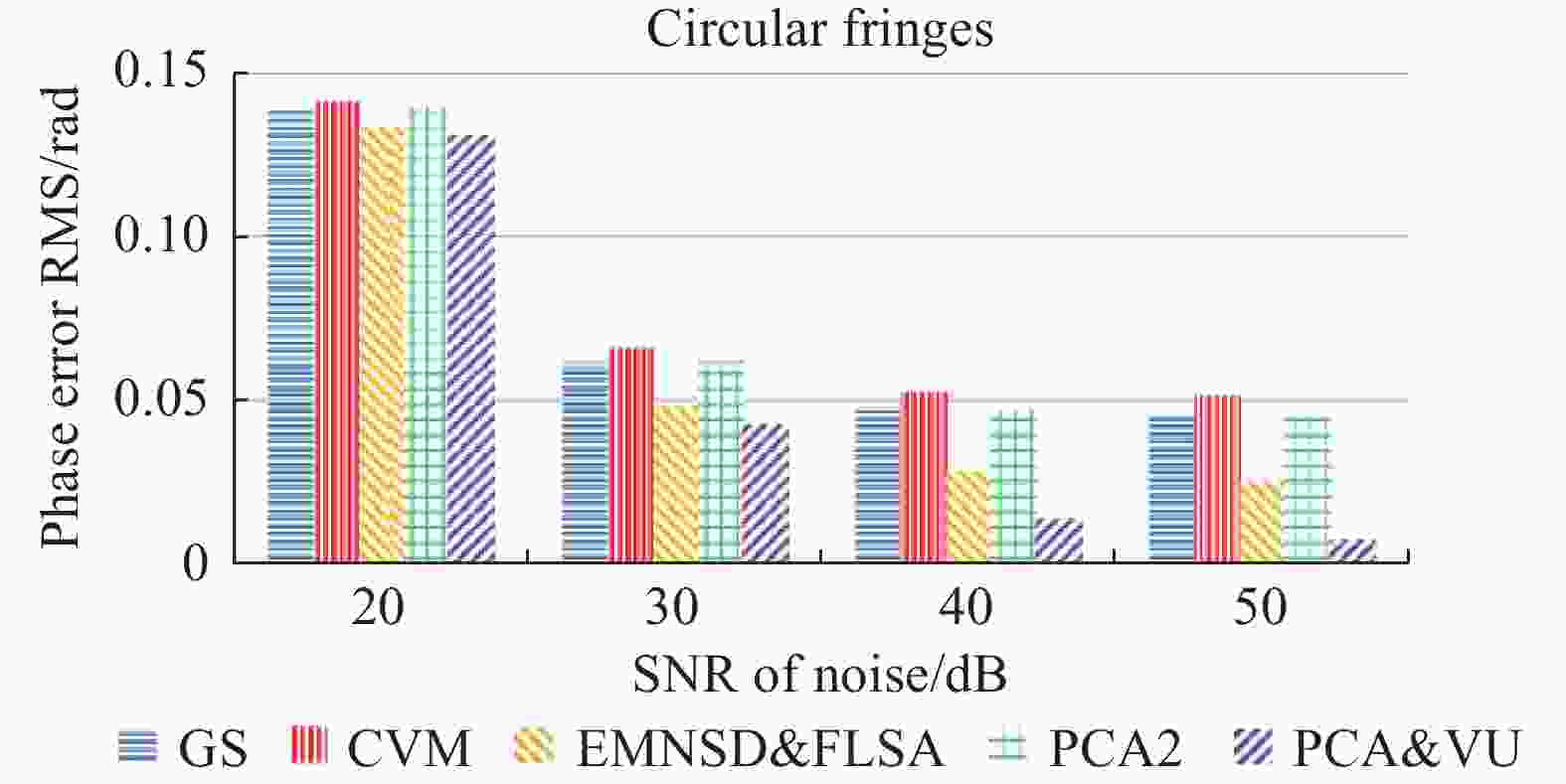
图 5 针对圆条纹不同相移算法在不同噪声条件下的相位误差RMS值
Figure 5. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different levels of noise
为了考查不同相移值对五种算法的影响和不同算法的有效相移范围,在非理想的背景光强、调制幅度以及20 dB噪声的条件下,模拟了相移范围为0.1~3.1 rad的干涉图,五种算法的计算结果如图6所示。对所有算法都有相同的结论:相移值越接近π/2,相位误差越小,越接近于0和π,相位误差越大。因此,如果能够设置相移值,尽量设置其接近π/2,远离0和π。对于任意相移值,PCA&VU和EMNSD&FLSA的精度始终高于GS、CVM及PCA2,并且PCA&VU的精度也始终略高于EMNSD&FLSA。在上述条件下,PCA&VU和EMNSD&FLSA的有效相移范围为0.5~2.7 rad,其他三种算法的有效相移范围为0.5~2.6 rad。噪声的存在影响了相移算法的有效相移范围,但是优秀的算法能够尽量抑制噪声的影响。
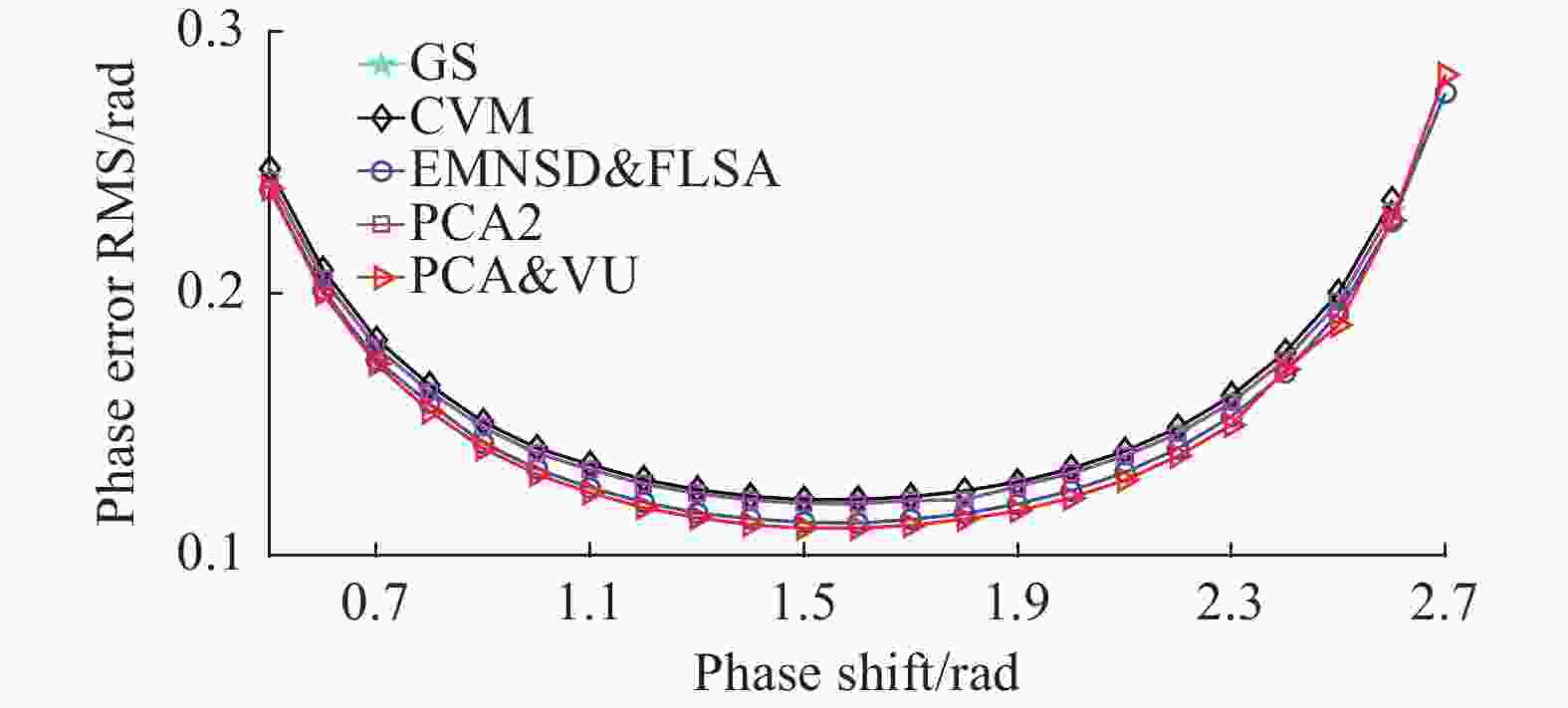
图 6 针对圆条纹不同相移算法在不同相移值和20 dB噪声条件下的相位误差RMS值
Figure 6. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different phase shifts and 20 dB of noise
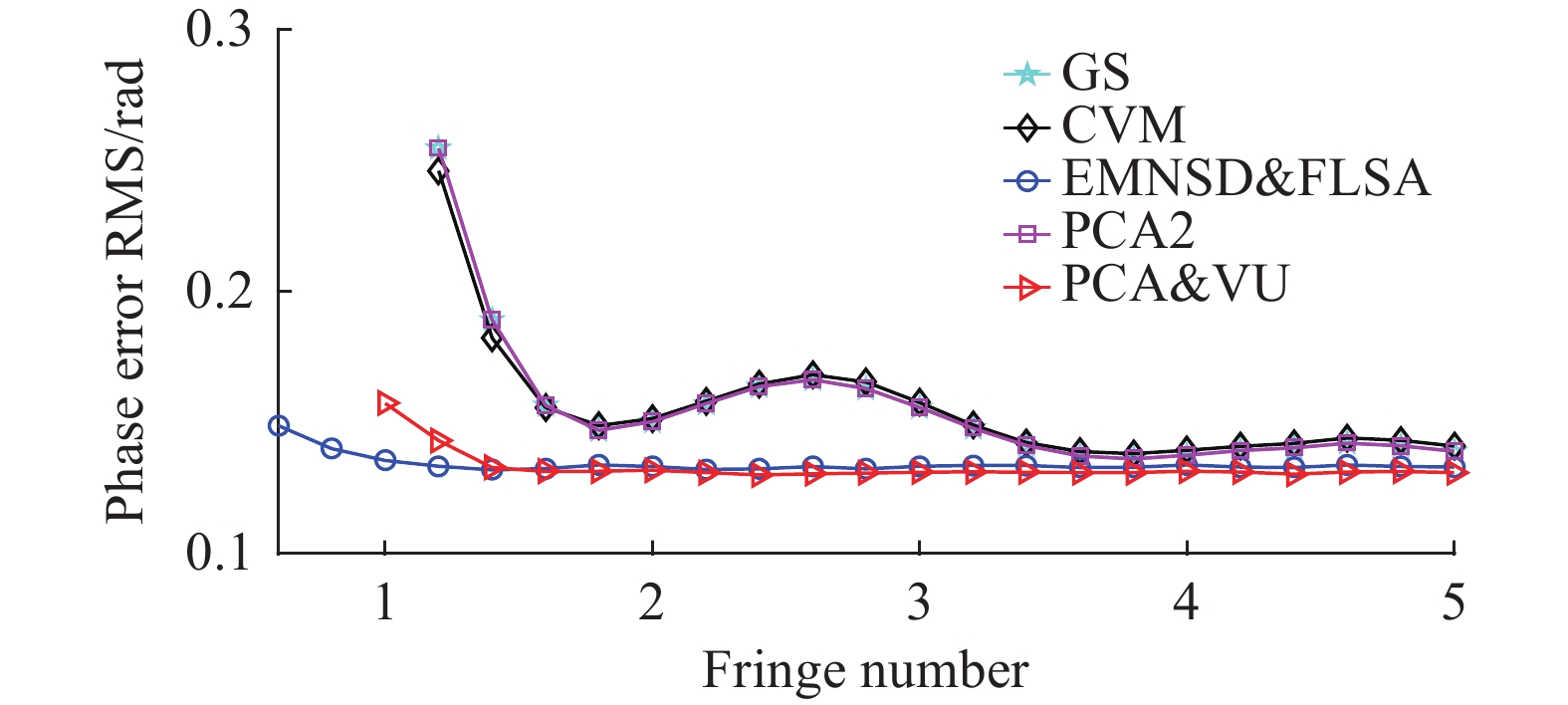
最后,对不同条纹数量进行了模拟,设置条纹数量为0.6~5,结果如图7所示。可以看出,GS、CVM及PCA2在条纹数量小于3时,相位误差不稳定,而在条纹数量大于3时,相位误差趋于稳定,尤其当条纹数量大于4时,相位误差几乎不变。对于EMNSD&FLSA和PCA&VU来说,当条纹数量大于1.4时,相位误差几乎不变。从分析结果可以看出,EMNSD&FLSA的有效条纹范围最大,为0.6~5.0,其次是PCA&VU,范围为1.0~5,最后是GS、CVM和PCA2,范围为1.2~5.0。由于EMNSD&FLSA没有滤波,而且在计算过程中没有近似,因此有效条纹范围最大。PCA&VU在计算相位初值时有近似,因此有效条纹范围受到影响,GS、CVM和PCA2的有效条纹范围最小是受到滤波算法及算法近似的影响。对于任意条纹数量,EMNSD&FLSA和PCA&VU相位误差都比其他三种算法小。值得注意的是,相移算法在条纹数量较大的时候都是适用的,因此5不是最大的条纹数量。

图 7 针对圆条纹不同相移算法在不同条纹数量和20 dB噪声条件下的相位误差RMS值
Figure 7. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different fringe numbers and 20 dB of noise
经过上面的模拟分析,可以看出,PCA&VU和EMNSD&FLSA无论是对于圆条纹还是不规则条纹,无论是在有噪声的环境下,还是理想情况下,精度都是比较高的。在低噪声条件下,PCA&VU和EMNSD&FLSA性能更加优越,因此在实验过程中,可以采用多次测试干涉图取平均等方法尽量消除噪声,然后再利用PCA&VU和EMNSD&FLSA计算相位。在不同的相移下,PCA&VU和EMNSD&FLSA有效相移范围更大,精度也更高,在相移值接近π/2时,精度达到最高,实验过程中,可以设置相移接近π/2,远离0和π。在不同的条纹数量下,PCA&VU和EMNSD&FLSA有效条纹范围更大,尤其是EMNSD&FLSA在条纹数量低于1时,依然有效,随着条纹数量的增加,PCA&VU和EMNSD&FLSA精度很快稳定,当条纹数量大于1.4时,精度几乎对条纹数量不敏感,实验过程中,可以调整条纹数量大于2,将得到稳定的相位计算精度。在上面的所有模拟中,PCA&VU的相位计算精度都比EMNSD&FLSA略高,不仅如此,其计算时间也低于EMNSD&FLSA。综上所述,PCA&VU是一种在各种情况下,都能实现高精度、快速、稳定的相位计算的两步随机相移算法,适合高精度光学在线检测。
-
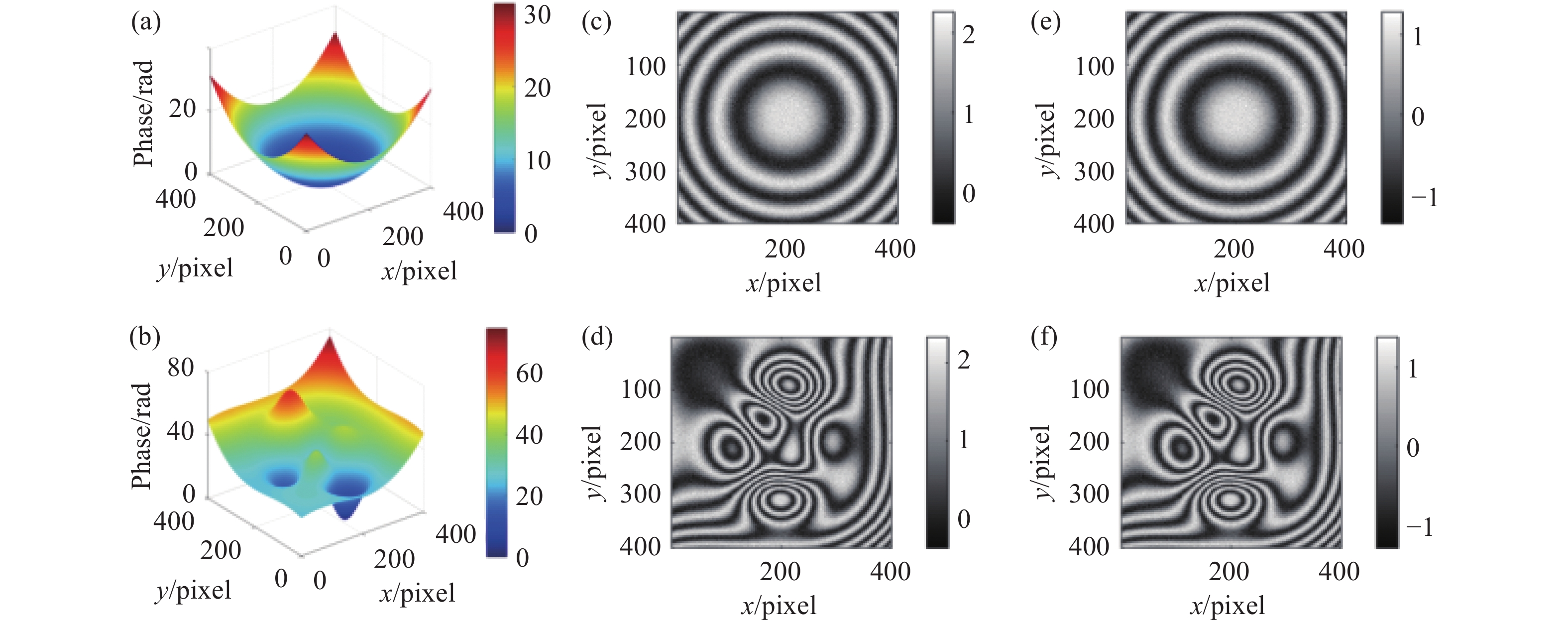
为了进一步分析和对比上述五种相移算法,采用双模快照干涉仪采集了四幅相移值分别为0、π/2、π和3π/2的干涉图,干涉图像素数为301 pixel×301 pixel。如图8所示,双模快照干涉仪采用的是偏振相机,相移误差比较小,可以利用标准四步相移算法计算出来的相位值作为参考相位值,其他相移算法计算出来的相位与参考相位之差定义为相位偏差。为了验证上面的模拟分析结果,同样采集了两组干涉图,分别是圆条纹和不规则条纹的。图9(a)和(b)分别为圆条纹和不规则条纹对应的参考相位图,图9(c)和(d)分别为采集的圆条纹和不规则条纹干涉图,经过高斯滤波后,干涉图如图9(e)和(f)所示。采用五种相移算法分别计算相位,将计算出来的相位分布与图9的参考相位分布作差作为相位偏差分布,结果如图10所示。图(a)~(e)为圆条纹的相位偏差分布图,图(f)~(j)为不规则条纹的相位偏差分布图。可以看出,无论是圆条纹还是不规则条纹,EMNSD&FLSA和PCA&VU的相位偏差RMS值都比GS、CVM和PCA2小,GS和PCA2相位偏差RMS值一致,PCA&VU相位偏差RMS值比EMNSD&FLSA略低。上面实验结果与模拟结果一致,但是实验结果有一点和模拟结果不同,对于圆条纹来说,CVM的相位偏差RMS值低于GS和PCA2,对于不规则条纹来说,结果恰好相反,而模拟结果中,无论是对于圆条纹还是不规则条纹,CVM的相位计算精度都低于GS和PCA2,CVM依赖于相移值的计算精度,从而导致其计算精度的不稳定。单纯就相位计算精度而言,文中提出的PCA&VU和EMNSD&FLSA相差不多,但是对于高精度光学检测而言,精度的小幅度提高也是有意义的。另外,笔者也对实验数据的处理时间进行了评估,如表2所示,实验干涉图的像素比模拟干涉图少,因此五种算法花费的时间更少。其他结论和模拟结果一样,文中提出的PCA&VU虽然是迭代算法,但是花费的时间却很少,针对PCA&VU高精度、少时间的特点,适合于高精度光学在线检测。
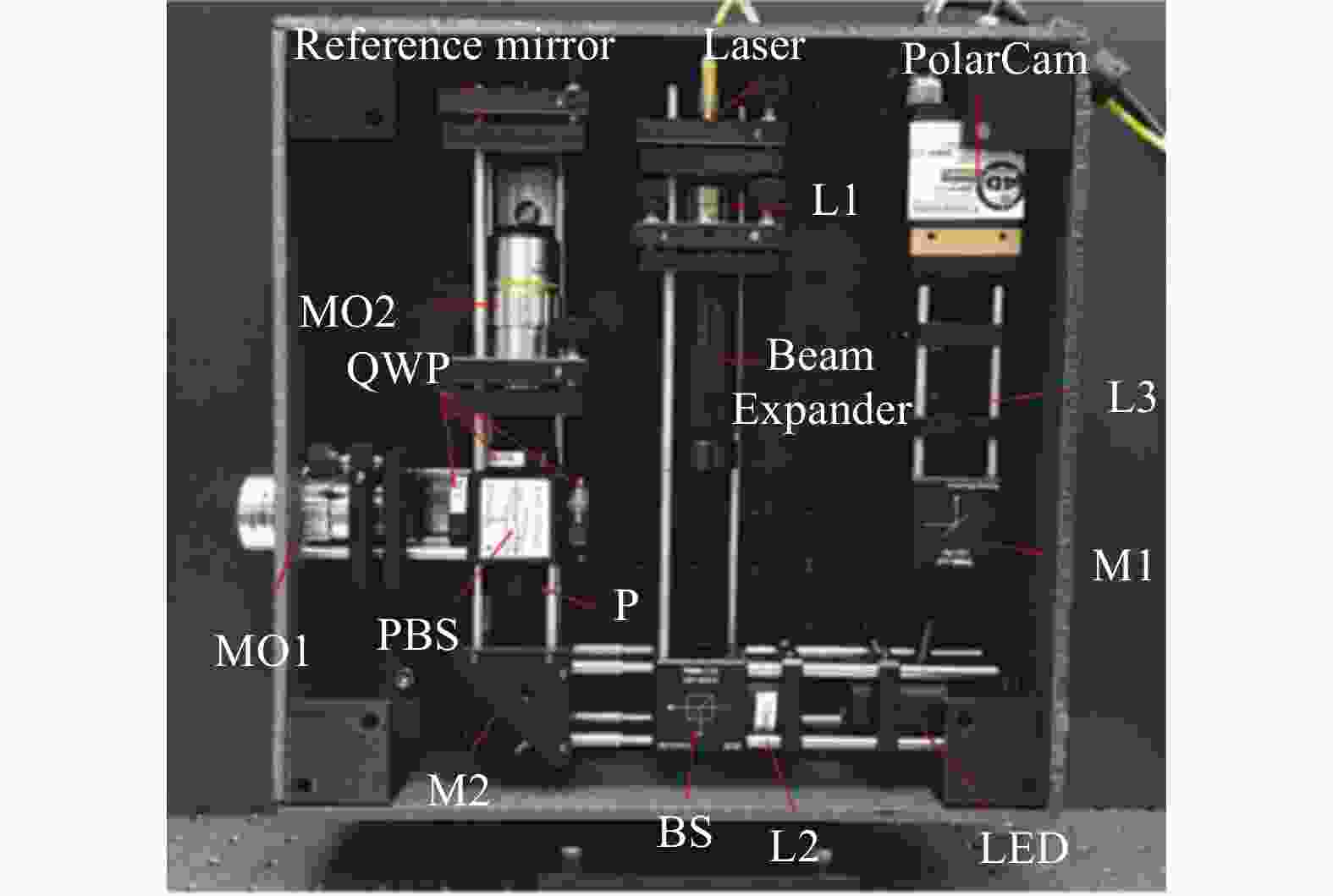
图 8 双模快照干涉仪的实验装置图
Figure 8. Experimental layout of dual-mode snapshot interferometry
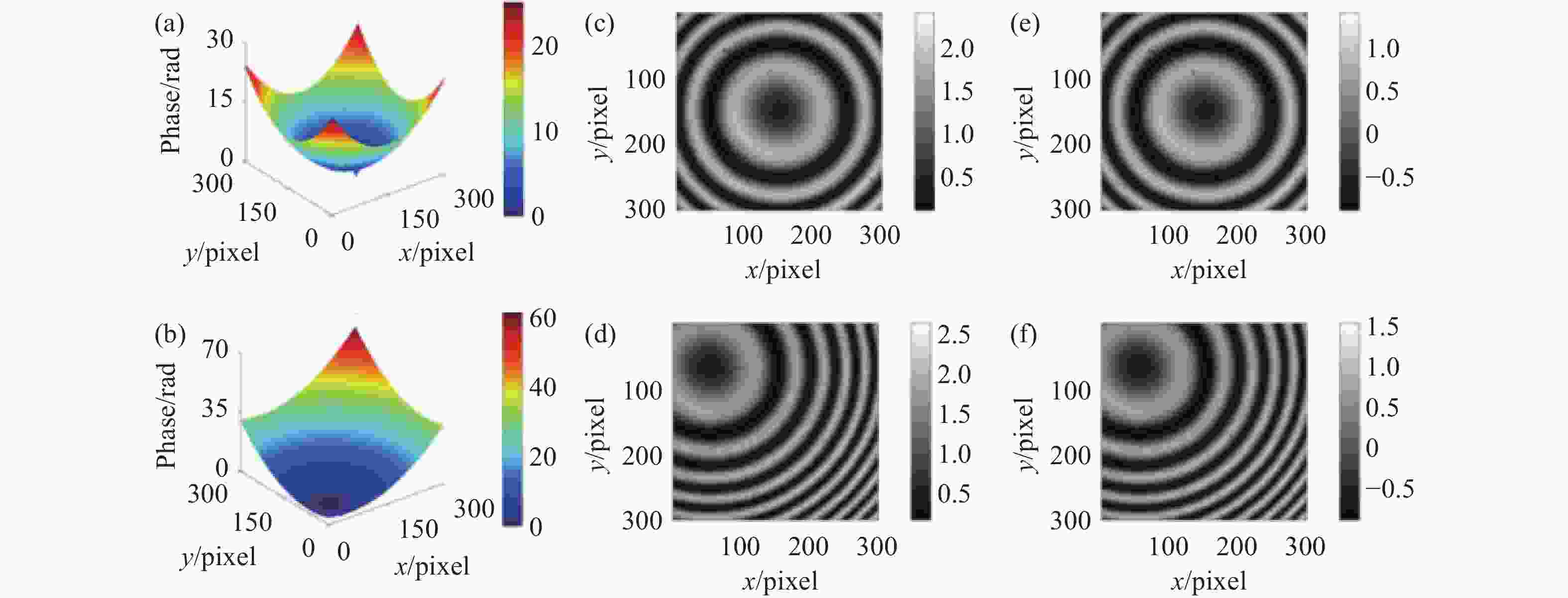
图 9 实验相位分布图、相移干涉图和高斯高通滤波后干涉图。 (a)、(b)圆条纹和不规则条纹对应的参考相位分布图;(c)、(d)圆条纹和不规则条纹干涉图;(e)、(f)高斯高通滤波后圆条纹和不规则条纹干涉图
Figure 9. Experimental phase distributions, phase-shifting interferograms and interferograms after Gaussian high-pass filtering. (a), (b) Theoretical phase distributions corresponding to the circular and irregular fringes; (c), (d) Interferograms with circular and irregular fringes; (e), (f) Interferograms with circular and irregular fringes after Gaussian high-pass filtering

图 10 不同相移算法的实验相位偏差分布图。 (a)~(e)圆条纹的相位偏差分布图; (f)~(j)不规则条纹的相位偏差分布图
Figure 10. Experimental phase deviation distributions of different phase-shifting algorithms. (a)-(e) Phase deviation distributions of circular fringes; (f)-(j) Phase deviation distributions of irregular fringes
表 2 实验计算时间
Table 2. Computational time in the experiment
PSA GS CVM EMNSD&FLSA PCA2 PCA&VU Time/s 0.006 0.546 0.096 0.006 PCA 0.006 VU 0.025 Total 0.031 -
文中提出了一种基于主成分分析和VU分解法的两步随机相移算法,该算法先采用两步主成分分析法求出初始相位,然后利用没有滤波的两幅原始相移干涉图,通过VU分解法进行更高精度的相位计算。通过模拟和实验数据,对传统的、性能良好的GS、CVM、EMNSD&FLSA和文中求相位初值的PCA2及提出的PCA&VU算法进行对比,分析结果显示,对于不同的条纹类型、噪声、相移值及条纹数量,五种算法中PCA&VU精度都是最高的,而且有效相移范围和有效条纹数量范围都比GS、CVM和PCA2大,而花费时间虽然比GS和PCA2多,但是却小于0.05 s,比同为非滤波的两步随机相移算法EMNSD&FLSA还少。PCA&VU在噪声越小的情况下,优越性体现的越明显,尤其在理想情况下,能够计算出完全正确的相位,意味着该算法没有固有误差。因此,经过综合对比,PCA&VU性能最好。对于PCA&VU来说,相移值越接近π/2,相位误差越小,越接近0和π,相位误差越大,另外,当条纹数量大于2时,PCA&VU可以得到稳定的相位计算精度。因此,如果需要高的相位计算精度,最好能够提前抑制噪声,同时设置相移值远离0和π,条纹数量大于2。
Two-step random phase-shifting algorithm based on principal component analysis and VU decomposition method
-
摘要: 为了平衡相位计算的精度和速度,大量的两步随机相移算法发展起来。提出了一种基于主成分分析和VU分解法的快速、高精度两步随机相移算法。首先,采用两步主成分分析法对经过滤波的两幅相移干涉图进行计算求出迭代初始相位;然后,利用没有滤波的两幅相移干涉图进行VU分解、迭代求出最终相位。通过模拟和实验结果对比表明:与四种性能良好的两步随机相移算法相比,对于不同的条纹类型、噪声、相移值及条纹数量,提出的算法综合性能最好,其精度最高,有效相移范围和有效条纹数量范围最大,当干涉图像素数为401 pixel×401 pixel时,提出的算法仅比格兰-施密特正交化法和两步主成分分析法多花费0.035 s。在理想情况下,提出的算法可以得到完全正确的结果。如果需要得到较高精度,最好能够提前抑制噪声,同时设置相移值远离0和π,条纹数量大于2。主成分分析和VU分解法无需滤波,花费近似非迭代算法的时间获得迭代算法的精度,其打破了迭代算法花费时间较多的限制,适合高精度光学在线检测,有广泛的发展前景。Abstract:
Objective The level of optical metrology determines the level of optical manufacturing technology, and the phase-shifting interferometry (PSI) as an easy, high-speed and accurate optical testing tool is usually used during or after optical fabrication. Both accuracy and efficiency are important to PSI. Outstanding phase-shifting algorithms (PSAs) can reduce the requirements for the interferometer hardware and environment, and further improve the accuracy and speed of PSI. Traditional PSAs with known phase shifts are easily affected by the miscalibration of piezo-transducer and environmental errors. In order to save time, many single-step PSAs were developed. Nevertheless, the sign of phase is difficult to judge by only one interferogram. In some high-precision events, accurate phase reconstruction is of interest. Hence, the multi-step PSAs with more than three interferograms were developed. However, it's difficult to reconstruct the phase with high accuracy and efficiency simultaneously. Comparatively, two-step random PSAs can avoid the effect of phase shift error, solve the sign ambiguity problem of the single-step PSAs, and balance the accuracy and speed. However, general two-step random PSAs need pre-filtering or use some complex methods to calculate background, these methods will cost more time. To balance the computational time and accuracy, a fast and high-precision two-step random phase-shifting algorithm based on principal component analysis and VU decomposition method is proposed in this paper. Methods A two-step random phase-shifting algorithm based on principal component analysis and VU decomposition method is proposed in this paper. Firstly, two-step principal component analysis method is used to calculate the initial phase of iteration by two filtered phase-shifting interferograms, and then VU decomposition and iteration of two unfiltered phase-shifting interferograms are used to calculate the final phase. Finally, the proposed method is compared with four good two-step random phase-shifting algorithms for different fringe types, noise, phase shift values and fringe numbers to verify its superior performance in the computational time and accuracy. Results and Discussions Compared with four good two-step random phase-shifting algorithms, the proposed method has the best comprehensive performance for different fringe types, noise, phase shift values and fringe numbers. The proposed method has the highest accuracy. Meanwhile, its effective phase shift range and fringe number range are the largest. When the size of interferograms is 401 pixel×401 pixel, the proposed method takes only 0.035 s more than Gram-Schmidt orthonormalization algorithm and two-step principal component analysis method. Under ideal conditions, the proposed method can get exactly correct result. If high precision is required, it is best to suppress the noise in advance, while setting the phase shift value away from 0 and π, and the fringe number greater than 2. Conclusions In order to balance the accuracy and speed of phase calculation, a fast and high-precision two-step random phase-shifting algorithm based on principal component analysis and VU decomposition method is proposed in this paper. The method is characterized by high accuracy, high speed and no filtering. It takes approximately the time of non-iterative algorithm to obtain the accuracy of iterative algorithm, and breaks the limit that iterative algorithm costs more time. It is suitable for high-precision optical in-situ measurement and has wide development future. -
图 1 模拟相位分布图、干涉图和高斯高通滤波后干涉图。 (a)、(b)圆条纹和不规则条纹对应的理论相位分布图;(c)、(d)圆条纹和不规则条纹干涉图;(e)、(f)高斯高通滤波后的圆条纹和不规则条纹干涉图
Figure 1. Simulated phase distributions, interferograms and interferograms after Gaussian high-pass filtering. (a), (b) Theoretical phase distributions corresponding to the circular and complex fringes; (c), (d) Interferograms with circular and complex fringes; (e), (f) Interferograms with circular and complex fringes after Gaussian high-pass filtering
图 2 不同相移算法的相位误差分布图。(a)~(e)圆条纹的相位误差分布图;(f)~(j)不规则条纹的相位误差分布图
Figure 2. Phase error distributions of different phase-shifting algorithms. (a)-(e) Phase error distributions of circular fringes; (f)-(j) Phase error distributions of irregular fringes
图 3 针对不同类型条纹,不同相移算法的相位误差RMS值 (20 dB)
Figure 3. Phase errors RMS of different phase-shifting algorithms with different types of fringes (20 dB)
图 4 理想情况下,针对不同类型条纹,不同相移算法的相位误差RMS值
Figure 4. Phase errors RMS of different phase-shifting algorithms with different types of fringes in the ideal case
图 5 针对圆条纹不同相移算法在不同噪声条件下的相位误差RMS值
Figure 5. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different levels of noise
图 6 针对圆条纹不同相移算法在不同相移值和20 dB噪声条件下的相位误差RMS值
Figure 6. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different phase shifts and 20 dB of noise
图 7 针对圆条纹不同相移算法在不同条纹数量和20 dB噪声条件下的相位误差RMS值
Figure 7. Phase errors RMS of different phase-shifting algorithms corresponding to the circular fringes with different fringe numbers and 20 dB of noise
图 9 实验相位分布图、相移干涉图和高斯高通滤波后干涉图。 (a)、(b)圆条纹和不规则条纹对应的参考相位分布图;(c)、(d)圆条纹和不规则条纹干涉图;(e)、(f)高斯高通滤波后圆条纹和不规则条纹干涉图
Figure 9. Experimental phase distributions, phase-shifting interferograms and interferograms after Gaussian high-pass filtering. (a), (b) Theoretical phase distributions corresponding to the circular and irregular fringes; (c), (d) Interferograms with circular and irregular fringes; (e), (f) Interferograms with circular and irregular fringes after Gaussian high-pass filtering
图 10 不同相移算法的实验相位偏差分布图。 (a)~(e)圆条纹的相位偏差分布图; (f)~(j)不规则条纹的相位偏差分布图
Figure 10. Experimental phase deviation distributions of different phase-shifting algorithms. (a)-(e) Phase deviation distributions of circular fringes; (f)-(j) Phase deviation distributions of irregular fringes
表 1 模拟计算时间
Table 1. Computational time in the simulation
PSA GS CVM EMNSD&FLSA PCA2 PCA&VU Time/s 0.011 2.328 0.119 0.011 PCA 0.011 VU 0.035 Total 0.046  下载: 导出CSV
下载: 导出CSV
表 2 实验计算时间
Table 2. Computational time in the experiment
PSA GS CVM EMNSD&FLSA PCA2 PCA&VU Time/s 0.006 0.546 0.096 0.006 PCA 0.006 VU 0.025 Total 0.031
下载: 导出CSV
-
[1] Zhang Yu, Jin Chunshui, Ma Dongmei, et al. Key technology for fiber phase-shifting point diffraction interferometer [J]. Infrared and Laser Engineering, 2015, 44(1): 254-259. (in Chinese) doi: 10.3969/j.issn.1007-2276.2015.01.044 [2] Tian Chao, Liu Shengchun. Two-frame phase-shifting interferometry for testing optical surfaces [J]. Optics Express, 2016, 24(16): 18695-18708. doi: 10.1364/OE.24.018695 [3] Wang Zhaoyang, Han Bongtae. Advanced iterative algorithm for phase extraction of randomly phase-shifted interferograms [J]. Optics Letters, 2004, 29(14): 1671-1673. doi: 10.1364/ol.29.001671 [4] Vargas J, Quiroga J A, Belenguer T. Phase-shifting interferometry based on principal component analysis [J]. Optics Letters, 2011, 36(8): 1326-1328. doi: 10.1364/OL.36.001326 [5] Deng Jian, Wang Kai, Wu Dan, et al. Advanced principal component analysis method for phase reconstruction [J]. Optics Express, 2015, 23(9): 12222-12231. doi: 10.1364/OE.23.012222 [6] Yatabe K, Ishikawa K, Oikawa Y. Simple, flexible, and accurate phase retrieval method for generalized phase-shifting interferometry [J]. Journal of the Optical Society of America A, 2017, 34(1): 87-96. doi: 10.1364/JOSAA.34.000087 [7] Vargas J, Quiroga J A, Sorzano C O S, et al. Two-step demodulation based on the Gram-Schmidt orthonormalization method [J]. Optics Letters, 2012, 37(3): 443-445. doi: 10.1364/ol.37.000443 [8] Luo Chunshu, Zhong Liyun, Sun Peng, et al. Two-step demodulation algorithm based on the orthogonality of diamond diagonal vectors [J]. Applied Physics B, 2015, 119: 387-391. [9] Niu Wenhu, Zhong Liqun, Sun Peng, et al. Two-step phase retrieval algorithm based on the quotient of inner products of phase-shifting interferograms [J]. Journal of Optics, 2015, 17: 085703. doi: 10.1088/2040-8978/17/8/085703 [10] Cheng Zhongtao, Liu Dong. Fast and accurate wavefront reconstruction in two-frame phase-shifting interferometry with unknown phase step [J]. Optics Letters, 2018, 43(13): 3033-3036. doi: 10.1364/OL.43.003033 [11] Cheng Zhongtao, Liu Dong, Zhang Lei. Random two-frame phase-shifting interferometry via minimization of coefficient of variation [J]. Applied Physics Letters, 2019, 115: 121107. doi: 10.1063/1.5118296 [12] Farrell C T, Player M A. Phase step measurement and variable step algorithms in phase-shifting interferometry [J]. Measurement Science and Technology, 1992, 3: 953-958. doi: 10.1088/0957-0233/3/10/003 [13] Zhang Yu, Tian Xiaobo, Liang Rongguang. Two-step random phase retrieval approach based on Gram-Schmidt orthonormalization and Lissajous ellipse fitting method [J]. Optics Express, 2019, 27: 2575-2588. doi: org/10.1364/OE.27.002575 [14] Zhang Yu, Tian Xiaobo, Liang Rongguang. Accurate and fast two-step phase shifting algorithm based on principle component analysis and lissajous ellipse fitting with random phase shift and no pre-filtering [J]. Optics Express, 2019, 27(14): 20047-20063. doi: 10.1364/OE.27.020047 [15] Zhang Yu. Random phase retrieval approach using Euclidean matrix norm of sum and difference map and fast least-squares algorithm [J]. Optics Communications, 2020, 460: 125174. doi: org/10.1016/j.optcom.2019.125174 [16] Zhang Yu, Tian Xiaobo, Liang Rongguang. Random two-step phase shifting interferometry based on Lissajous ellipse fitting and least squares technologies [J]. Optics Express, 2018, 26(12): 15059-15072. doi: 10.1364/OE.26.015059 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 96
- HTML全文浏览量: 20
- PDF下载量: 22
- 被引次数: 0

