







-
感知型激光雷达是一种能够在室内外环境下自主进行环境感知、边界提取、目标识别的实时处理系统。随着近年来导航避障、智能驾驶研究的高速发展,实时感知型激光雷达作为一种主动式光学成像技术,越来越受到人们的关注,日渐成为自动驾驶最有效的感知手段,国内外相关机构都在积极开展相关研究工作[1-3]。以Velodyne和IBEO为代表的系列化产品目前已得到广泛应用,产品亦由早期的单线激光雷达发展到目前常用的16线、32线、64线、128线,甚至是300线激光雷达。国内厂商诸如禾赛、速腾聚创、镭神智能在近两年也先后实现了高线数激光雷达的产品研制及市场化推广。随着智能化要求的提高,国内外的激光雷达研究机构基于机械扫描、MEMS振镜扫描、OPA、面阵探测、FMCW测距等方法研制激光雷达样机[4-5],以获取更高分辨率的三维点云。其中自动驾驶汽车大多采用一台高线数激光雷达搭配多台低线数激光雷达的方式来提高视场分辨率,扩大感知范围,但以这种方式搭配的激光雷达难以融入车辆本身的气动外形之中,同时也牺牲了激光雷达的一部分视场。随着智能汽车对激光雷达更高视场分辨率、更易于与车辆集成、满足车规级环境适应性等各方面要求的提高,如何设计一款即满足技术指标和可靠性需求,又具有成本优势和量产能力的激光雷达成为了感知型激光雷达亟需突破的关键。
值得关注的是随着感知激光雷达由单线向多线型、智能化以及小型化趋势的发展,今后激光雷达线数将呈指数倍增长,对回波数据量、传输速率要求也越来越高,而数据采集系统作为激光雷达的重要组成部分[6-8],承担着整个激光雷达外设控制、状态监控、数据采集、数据传输和数据解算等功能,因此开发高性能高性价比多通道数据实时采集处理系统也成为目前的迫切需求。
针对感知型激光雷达回波信号强弱变化丰富、数据量大、实时性高等需求[9-10],文中基于自研的高分辨率大视场激光雷达,采用可靠的机械扫描结构与阵列探测相结合的方式,针对性提出了一种基于DSP+FPGA的高效多通道实时控制采集处理系统。该系统充分利用了FPGA并行运算和DSP浮点高运算的特点,以高实时性为目标,采用FPGA实现控制外设、状态监控、多通道数据采集和数据传输功能,同时利用DSP实现回波数据实时解算和数据传输。整个系统通过采用两个缓存乒乓操作实现无死区时间的多通道数据实时传输和计算处理,并将计算结果经千兆网口传送到上位机实时显示。所提方案具有结构可靠、时间分辨率高、体积小、功能可扩展和性价比高等优点,保证感知型激光雷达多通道数据采集的实时性和准确性,具有良好的市场推广价值。
-
近年来,感知型激光雷达发展趋势如图1所示。

Figure 1. Development tend of real-time perception lidar
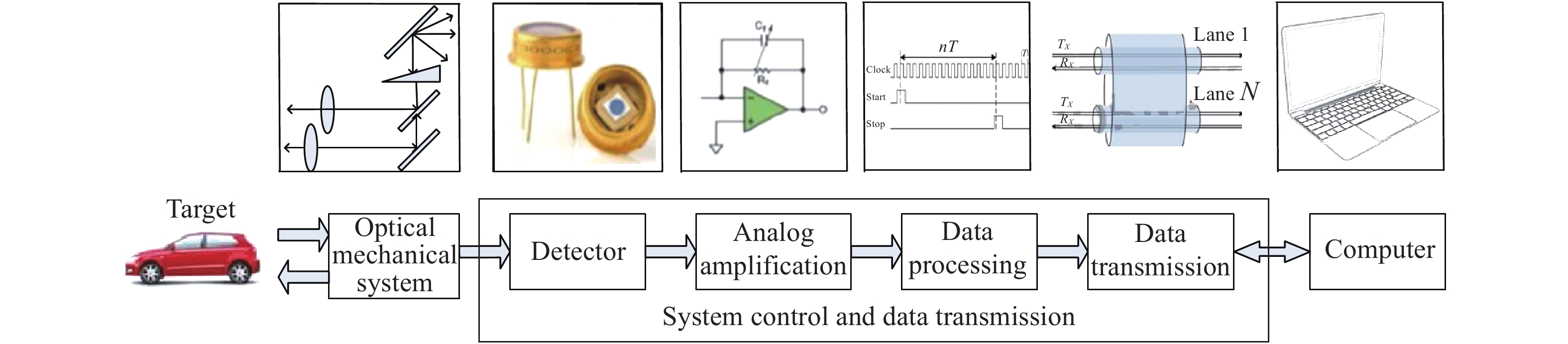
感知型激光雷达由光机扫描单元、光电接收单元、系统控制及数据采集处理传输系统组成[11],布局示意如图2所示。其中,系统控制及数据采集处理传输系统负责将激光回波数据转换为数字信号,并进行数据传输和与处理,是激光雷达点云实时显示的关键单元。

Figure 2. Structure diagram of detection unit of real-time perception lidar
-
对于飞行时间TOF(Time of Flight,TOF)形式的激光雷达,脉冲信号间的混叠决定了其最大测距范围受两个因素限制[12]:(1)脉冲计数器的最大计数间隔;(2)激光发射频率。为了减小系统尺寸、质量和功耗,文中的激光雷达在设计中采用了定制的半导体激光器,出射激光波长为905 nm,激光脉冲频率20 kHz,激光脉冲宽度1~5 ns可调,激光峰值功率25~125 W。在激光出射端,通过准直镜将激光光束的瞬时视场角压缩在3 mrad,使出射激光能量更集中。同时,激光发射模块通过光纤耦合与分光的方式增加激光发射通道数,从而提高了激光雷达在垂直视场方向的分辨率。光纤耦合的出射激光具有良好的光束质量,采用紧凑的旋转扫描模组实现48通道以上的可靠扫描覆盖,可节省大量空间,便于激光雷达的小型化设计。
光电接收单元主要包括光敏元件、自动增益控制电路、时刻鉴别电路和时间间隔测量电路[13]。所设计的激光雷达采用多路APD阵列作为探测器,并在接收端与多路APD检测电路一一对应,实现多路回波并行光电接收。配合扫描模块将扫描视场进行快速叠加,可达到48线以上激光雷达的垂直视场测量分辨率。
-
为实现对多通道激光雷达实时控制及显示,文中基于具有快速并行处理复杂数据能力的FPGA,兼顾成本考虑,采用Xilinx Spartan系列,设计了激光雷达控制及高速数据采集系统。系统结构如图3所示。采用自顶向下的设计方法[14],以激光器发出的触发信号作为时序参考,当上位机向FPGA发送控制命令后,FPGA接收指令并解析出需要控制的激光雷达外设,如激光器控制、时间间隔测量控制、机械扫描控制等,从而完成控制。然后采集激光雷达回波信号数据并传输至DSP,最终至上位机显示。

Figure 3. Block diagram of FPGA control system
由图3可知,该系统的模块包含:(1)时间间隔测量模块,负责对激光发射和返回的脉冲时间间隔进行高精度测量;(2) 电机控制与采集模块,负责控制电机按设定参数旋转,实时获取码盘数据,并记录每次激光发射时的码盘角度;(3)激光器控制模块,负责激光器重频、功率等设置;(4)用户交互模块,负责解析上位机输出的用户指令,实现数据交互以及测控参数输入等;(5)数据采集控制系统,除负责以上各外设控制外,还负责系统多通道数据接收、传输、预处理以及数据最后输出存储,是整个激光雷达系统的核心模块。其中对时间间隔测量和电机的控制及用户交互属于外设控制模块,通常利用采集系统中的UART、SPI等接口形式控制,下面将重点介绍采集其中的重点:数据采集处理传输及预处理功能。
-
工作过程中,激光器向目标发射激光脉冲,同时该激光脉冲有一小部分能量由参考信号取样器送到FPGA管脚端,FPGA接收该电信号作为起始时刻,启动数据采集传输工作。在数据采集过程中,回波信号与发射信号的时间差以及电机角度信息同时由FPGA按固定数据格式进行采集打包。当用户开启数据传输指令后,FPGA将采集后的数据发送给DSP并解算。为了实现数据的实时解算,提高系统的集成度,保证可靠性及降低成本,FPGA采集到回波数据后并未经过传统的SDRAM缓存,而是采用EMIFA接口直接传输到DSP中进行预处理。为防止DSP端同时进行数据传输和数据解算而发生事件冲突,FPGA和DSP端均采用乒乓操作来实现无死区时间的数据传输和解算,如图4、5所示。

Figure 4. Topological graph of hardware system

Figure 5. Working principle of ping pong ARM
FPGA与DSP间通过EMIFA接口进行数据传输,包括地址线、数据线、片选信号、读写使能信号。当FPGA将接收到的多通道激光测距回波信号经固定格式打包后,利用乒乓RAM的机制通过EMIFA接口传输到DSP,DSP通过增强型直接内存存取(Enhanced Direct Memory Access,EDMA)实现高速数据传输。
FPGA接收到的多通道数据以中断的形式通知DSP读取,DSP接收到数据采集完成中断申请后,根据乒乓存储标志读取相应存储器中的通道数据,实时解算出环境信息和激光雷达状态信息。
文中系统DSP采用TMS320C6748,内部集成8个处理核,可以同时而相对独立地运行,处理速度最高达到3648 MIPS,并满足低功耗的需求。同时该DSP扩展接口丰富,包括2个EMIFA接口,64个独立DMA通道及I2C、USB等接口。通过对相关寄存器的配置可以用EMIFA扩展外部存储器,使其具有独立的数据总线宽度,可控的建立时间、保持时间和选通时间、读、写时序。其中EMA_CS[0]n用于扩展SDRAM,最大支持512 M地址空间,其余片选信号EMA_CS[5∶2]n用于扩展异步存储器,最大支持32 M地址空间。文中选用SDRAM扩展方式,具体如图6所示。

Figure 6. Schematic diagram of EMIFA interface structure inside DSP
在读写时序方面,当DSP端写操作时,即FPGA读时序,在FPGA中检测WE下降沿且CE为低时,读取数据总线即可;当DSP端读操作时,即FPGA写时序,在FPGA中OE下降沿且CE为低时,写数据总线即可。上电后,DSP由FPGA控制其复位,并进行系统初始化。当FPGA准备好进行数据传输时,DSP内部EDMA3控制器检测到GPIO中断事件,触发EDMA3传输中断,将数据快速转移到C6748的DDR2存储器中。当存储的数据量达到预设长度时,CPU将进行数据处理,完成数据解算、目标检测算法。当数据解算完成后,DSP将结果通过网线上传到上位机中显示点云。
-
FPGA采集的回波数据中包含了大量回波信息:距离、回波个数、时间、灰度以及GPS等。文中设计的FPGA采集数据量可达100 Mbps,这对于数据的实时性解算压力很大。DSP外扩存储器单元由DRAM和FLASH组成,DRAM作为DSP外扩存储器,映射在DSP的0x80000000空间,FLASH存储DSP的boot应用程序,映射在DSP的0x90000000空间。DSP按照FPGA给出的固定格式数据结构进行解算为xyz点云格式。
点云解算分4个步骤,分别是三角函数值准备、公共变量计算、测距值解算和坐标值解算,通过4 个函数triPrepare、getPublicVariable、getDistance、getCoordinate 依次调用完成。triPrepare 函数完成解算所需三角函数值的准备,调用TI 官方提供的数学库mathlib 实现。getDistance 函数通过检调参数对FPGA 上传的测距值进行修正。getPublicVariable 与getCoordinate 用来实现测距值解算和坐标转换功能。见图7。

Figure 7. Block diagram of point cloud solution
实际扫描环境中,灰尘、杂点以及扫描元件中的轻微扰动使扫描得到的原始点云中存在较多的干扰信息,需进行处理。考虑实时性及DSP资源利用率,文中在DSP中进行的点云预处理主要包括去噪、平滑。首先进行离群点去除,根据统计分析方法求出最优k邻域,去除稀疏离群噪声;然后根据最优邻域半径去除孤立离群噪声点;最后对点云进行基于移动最小二乘算法的点云平滑处理。
-
为验证文中设计的数据传输系统的实时性和可靠性,首先对FPGA硬件板卡进行实验测试。实验条件如下:(1) 信号发生器产生两路同频率脉冲信号作为发射信号和接收回波信号,频率为2 MHz,峰峰值3.3 V,脉冲宽度10 ns,两路脉冲信号间隔100 ns,并将信号通过低损耗线连接到FPGA硬件板卡和光电接收单元;(2) FPGA经过1接收通道接收信号发生器信号,同时复制给其他47路接收通道,总共48接收通道,从而形成48通道数据;(3) FPGA自产生模拟电机角度信号;(4) 光电接收单元产生数字时间间隔差;(5) FPGA板接收光电接收单元产生的数字时间时间差,进行时间同步,并对发射信号和接收信号标记及数据打包;(6) FPGA将数据通过EMIFA接口发送给DSP。
图8给出了FPGA 的Chipscope软件抓取到的EMIFA接口中实测时序结果图。

Figure 8. EMIFA test timing diagram of FPGA board card
图8中dpram-addrbA和dpram-addrbB分别表示AB两路并行传输通道地址,dpram-dinbA和dpram-dinbB则分别表示AB两路并行传输通道的输入数据,由图(a)(b)可以看出,FPGA与DSP间的EMIFA接口无差地实现了乒乓传输和存储操作,从而实现无死区时间的数据传输和解算。EMIFA时钟频率50 MHz,数据位16 bit的情况下,满足45 MB/s的数据传输速率。
数据正确性和完整性分析如下:(1) FPGA通过Chipscope将数据尽量多的保存下来,通过MATLAB分析发射信号标记信息是否连续;(2) 通过MATLAB分析数据包号是否连续,数据包大小是否正确;(3) 多次重复步骤 (1),至少10次;(4) MATLAB统计数据包中接收到的光电接收单元的数字时间间隔差,从而得到测距误差。经过分析,传输数据率为42 MB/s且数据完整。此数据传输系统可正确完整地进行48通道数据传输,无漏错数据。同时,经测试,此数据采集系统也可满足24线、128线甚至300线以上区域型激光雷达数据实时采集与传输。
-
为进一步验证系统可实现三维点云实时成像,结合自研点云显示软件对研制的实时感知型激光雷达系统进行了实际测试。
文中多通道数据采集系统采用48线区域扫描激光雷达进行验证,其效果如图9所示,左侧是将激光雷达固定在实验桌上,在办公区走廊环境中,对场景中硬纸板箱子进行扫描。图9右侧为帧频20 fps,2 Mpts/s的点云,可清楚实时得到目标箱子的点云图,且三维点云显示无卡顿、缺失等现象,验证了此数据采集系统的有效性。

Figure 9. Real time point cloud image of lidar system
同时为了进一步验证DSP处理后的点云的完整性和正确性,在激光雷达工作过程中,首先采用Wireshark网络抓包软件将FPGA传输给DSP,经DSP上传给上位机的未解算的原始数据保存下来,进行数据完整性分析。分析过程与3.1中接收的步骤类似。经过分析,发射信号标记连续且完整,即在记录所有回波信号情况下(包括0回波),数据完整。其次,将激光雷达固定面向一面平整的墙工作,通过对平整墙面进行多个固定靶标设置并进行定点测距实验,亮白面反射靶标反射率为0.8,采用全站仪获取真实距离的方式对激光雷达测距误差进行评定。用Wireshark网络抓包软件将FPGA传输给DSP并经DSP实时初步解算后将数据保存下来,这里的初步解算数据并不是点云数据,而是DSP实时解算的数据时间间隔差和电机码盘数据,即距离和角度,通过MATLAB统计分析是否存在异常距离值和角度值。经过多次测量取平均方式,可得测距最大探测距离265 m,误差小于2 cm,角度分辨率小于0.05°。最后,将激光雷达在走廊环境下固定扫描纸箱子一段时间,并将点云数据保存下来,通过MATLAB进行离线点云显示,分析点云是否存在较多的异常点,如目标位置部分明显偏移。经分析,此数据传输系统可正确完整地进行数据传输,无漏错数据,保证了激光雷达设备的正常运行,其实时性和可靠性符合设计要求。
-
文中介绍了一种自研感知型激光雷达,重点设计并实现了其多通道数据采集系统。针对数据量大、传输实时性高、实时解算显示的需求,采用FPGA+DSP的高效方案对设备进行控制,数据采集和传输及实时解算,实现了一种应用于感知型激光雷达的实时多通道数据采集系统。通过对FPGA硬件板卡仿真测试分析和感知型激光雷达实验验证,实验结果表明该采集系统具有良好的准确性和稳定性,能够实时获取激光雷达数据并对采集数据进行实时解析,快速解算设备周围环境,整体功能满足多线系统要求,保证了激光雷达20 fps以上实时数据的可靠采集传输。此外,该多通道数据采集系统可依据激光雷达具体的应用需求进行运算资源重组,为实时感知型激光雷达应用推广提供有效支撑。
Design of multi-channel data acquisition system for real-time perception lidar
doi: 10.3788/IRLA20200291
- Received Date: 2020-12-06
- Rev Recd Date: 2021-01-17
- Publish Date: 2021-05-21
-
Key words:
- multi-channel data acquisition system /
- real-time perception /
- lidar /
- FPGA /
- DSP
Abstract: Lidar is the most effective means for real-time environmental awareness. Based on the demand of multi-channel perception lidar with large amount of data, real-time data transmission and miniaturization, a multi-channel parallel signal acquisition and processing system was designed based on FPGA and DSP. A self-developed three-dimensional lidar was designed, including mechanical scanning, linear array detection, data acquisition and control system. The system was implemented and verified in the three-dimensional point cloud imaging experiments. In this system, FPGA was responsible for multi-channel lidar data acquisition, control and transmission. DSP was used for data calculation and uploading the point cloud data to the upper computer through the network to realize the real-time display of point cloud. The experiments of lidar show that the proposed real-time data acquisition system could meet the requirements of point cloud calculation at 2 Mpts/s, with real time data acquisition and procession at 20 fps. The rapid calculation of lidar point cloud of the environment and obstacles is realized. It can be applied to automatic driving, navigation obstacle avoidance, perimeter security and etc.








 DownLoad:
DownLoad: