







-
海洋水下探测在未来战争和国民经济生产中的地位日益突出,如海战中进行实时信息交换、通信联络、指挥控制以及在海洋资源开发时对某一海域的水文数据进行采集,对海洋渔业资源进行监管,对海洋矿产资源进行勘探等,采用合适的空中-水下探测及通信技术是实现上述目标的关键与前提[1]。由于海水对电磁波吸收很大(包括光波),因此难以在海洋介质中作为远程探测工具[2]。然而,声波在水下有着良好的传播性能,频率范围在1 Hz到50 kHz之间的声波在水中的衰减系数约为10−4 dB/m到10−2 dB/m,因此在海水中声波是“信息”的理想载体[3]。
利用激光声源作为水下声源,激光发射装置和声接收装置无需与海水接触,在水下利用声波而非光波传播,避免了水对光波的严重吸收[4]。Hickman[5]构建了ELAS激光声系统,利用能量为15 J的红外脉冲CO2激光器,在实际海洋环境下进行了激光声遥感探测海深实验,验证了使用激光声探测水深的可行性。Blackmon[6-7]等人对光击穿机制下水下产生激光声信号的声学特性及通信应用进行了研究。王江安、王雨虹[8]设计了用于水下通信的激光声换能器,有效提高了激光声信号的峰值幅度。赵中华[9]等对激光致声通信进行了初步研究,发现通过对声信号进行幅频调制,可有效进行激光声通信。张晓琳[10-12]等进行了基于激光干涉的水表面声波探测技术研究。李胜勇[13]等分析了激光声在液体中的传播特性,通过频谱分析得到低频信号幅值随时间、距离变化衰减缓慢的规律。
综上,激光致声遥测技术具有机动灵活、探测效率高、受使用环境限制小等优点,这种探测方式从理论上讲完美了结合激光与声波二者的优点,是未来一种很有前景的空中-水下遥测方式[14]。我国由于受高重复频率、高能脉冲激光器等设备及关键技术的限制,在上述方面的研究还有待完善,急需开展科研攻关工作,以实现我国在空海探测及通信方面的技术领先与自主知识产权。文中利用光击穿机制下激光器产生的激光脉冲进行空水探测模拟实验研究,通过水听器高灵敏度的相干检测,将声波信号转换成电信号并传至示波器显示出信号波形。通过后期的数据分析及处理,模拟成像显示出信号幅值在一定范围内的变化情况并总结出了一般规律,根据时间互易原理实现了水下激光声信号的三维探测成像并利用有限元法进行激光在水下激发声波及传播的数值仿真,将探针接收到声波数据进行分析从而验证实验的正确性。在现有激光器可实现的条件下通过提高脉冲能量仿真声波在进行远距离传播后的信号衰减,论证了实现百米级传输及探测的可能性。研究结果对激光致声空海遥测领域中的应用有一定的参考价值。
-
激光致声利用高能量脉冲激光击打水面并与水相互作用而产生声波,可以将高能脉冲激光器装载在飞机上构成一个非接触式空中-海洋探测系统(图1)。根据激光脉冲能量强弱和相互作用区域的能量密度与时空分布,激光激发辐射与水相互作用产生声波的机制可分为热膨胀、汽化与光击穿三种,其中热膨胀的光声转换效率低于0.1%,汽化的效率为1%左右,光击穿的效率可达7%~30%[15]。
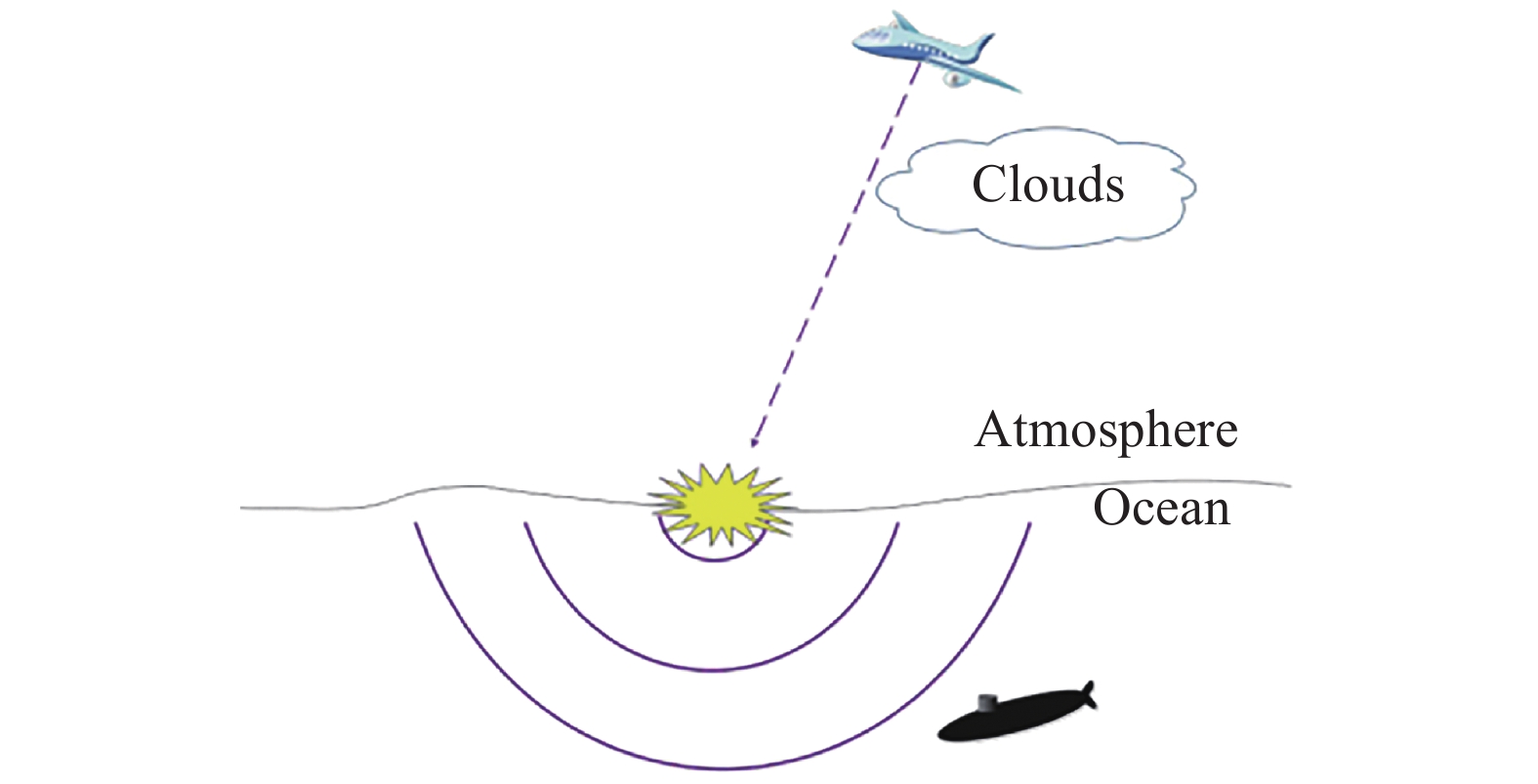
Figure 1. Laser induced acoustic telemetry model
-
当入射激光能量较弱、相互作用能量较低、无法通过水面加热达到沸点温度时,其产声机制为水的不均匀加热引起的热弹性压力(热膨胀)。热膨胀机制所产生的声压强
$p$ 如公式(1)所示[15]:式中:
$\alpha $ 为水的吸收系数;$c$ 为水中声速;${E_0}$ 为表面处热能密度;${a_v}$ 为水的膨胀系数;${c_p}$ 为水的比热容。对不同波长的激光,水对其有不同的吸收能力,消光长度越短则吸收能力越强(见图2)。热膨胀致声对实验设备要求低,声信号也相对较弱。

Figure 2. Relationship between extinction length of water and sound wavelength
-
随着入射激光脉冲能量增大,水面局部温度逐渐升高达到沸点时即产生汽化致声。假设水的初始温度为
${T_0}$ ,使得水面局部温度达到沸点所需要的能量$E$ 为[15]:式中:
$\rho $ 为水的密度;${T_{boil}}$ 为水的沸点温度;$\alpha $ 为水的吸收系数。与热膨胀致声相比,这种致声方式产生的声信号较强,但对激发激光脉冲的强度要求较高。 -
当激光脉冲强度达到水的介电击穿阈值(约107 W/cm2)时,会产生水的光学击穿。此时水的分子离解并形成等离子体,激光与水的作用变为光与等离子体的作用。发生光击穿的光强超过阈值不大时,击穿区呈点状,可以看作点声源,远场内离击穿区距离为
$r$ 处声脉冲表达式为[16]:式中:
$A$ 为与液体性质有关的函数;$c$ 为液体中声速;${\theta ^{ - 1}}$ 为声脉冲衰减常数。这种致声方式效果最好,但对实验设备的要求比较高。 -
因激光击水点面积微小,则可以把波源当作点波源,产生声波为球面波,分别向空气和水中进行传播。从频谱看,该声波为从几Hz到300 kHz分布的宽频波,但由于在0~20 kHz时受到环境噪声影响较为明显,而且考虑到声波的高频分量在水中衰减速度较快,因此常使用25~40 kHz的分量进行实际应用。
-
超声波在液体介质中的传播方程为:
式中:
${p_t}$ 为总压力;$c$ 为声速;$ \;\rho $ 为流体的密度;${C_p}$ 为常压热容;$\gamma $ 为比热率;$k$ 为导热系数;${p_b}$ 为背景压力;$p$ 为压力;${Q_m}$ 为偶极源;${q_d}$ 为单极源。在超声波全反射界面采用硬声场边界条件:
式中:
$n$ 为边界方向矢量。在材料半无限长边界处为无反射边界,采用平面波辐射边界条件:
声波在非理想媒质的传播过程中会随着距离的增大而产生衰减,此时声能转变为热能而耗散,这称为媒质中的声衰减。海水中的声吸收与纯水相比非常大。海水中的声吸收由3种效应引起:(1)切变黏滞性效应;(2)体积黏滞性;(3)声波频率低于100 kHz时,海水吸收是由于硫酸镁分子的离子弛豫。综合考虑所有因素,声波在海水中的衰减系数
$\alpha $ 为[17]:式中:
$\alpha $ 为海水声吸收系数(dB/km);$f$ 为水声频率(kHz)。 -
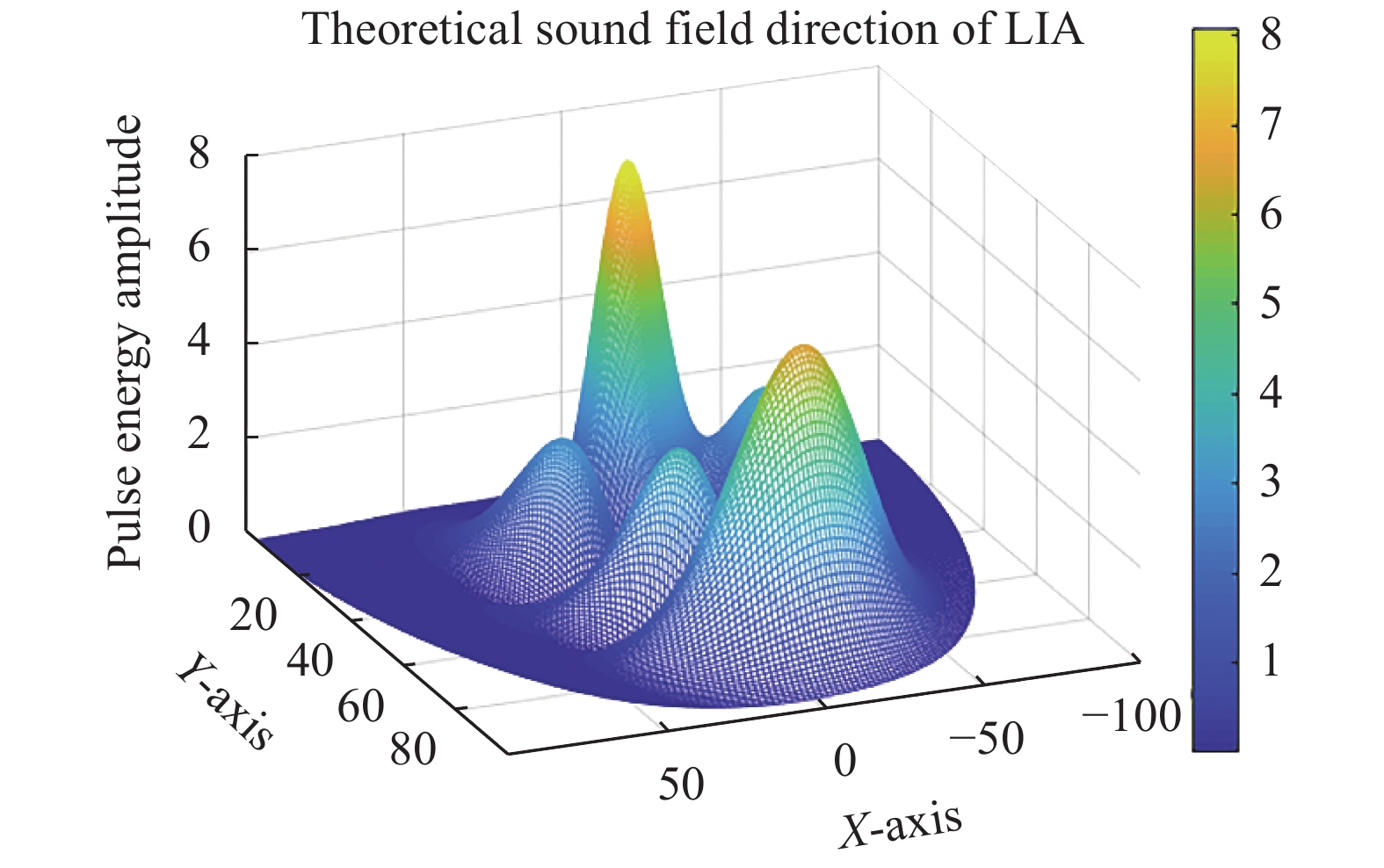
为研究水中光击穿所激发的声场,建立了激光致声模型,由空间能量的径向传播特性,模拟水中光击穿区形成的多个径向等离子体脉冲球源,理论上得到水中光击穿所激发的声场指向特性。等离子体产生辐射声场的方向性函数是[18]:
式中:
${A_s}$ 为距等离子体形成1 m处合成声波的总振幅;${A_{{s_{\max }}}}$ 是${A_s}$ 在空间方向上的最大值;${A_i}\left( {i = 0,1,2 \cdot \cdot \cdot ,N} \right)$ 为阵源在距其1 m位置所产生的声波振幅。激光致声辐射声场指向性模型如图3所示,其能量主要集中在与激光光束呈0°夹角方向上。
Figure 3. The sound field directivity model of LIA
-
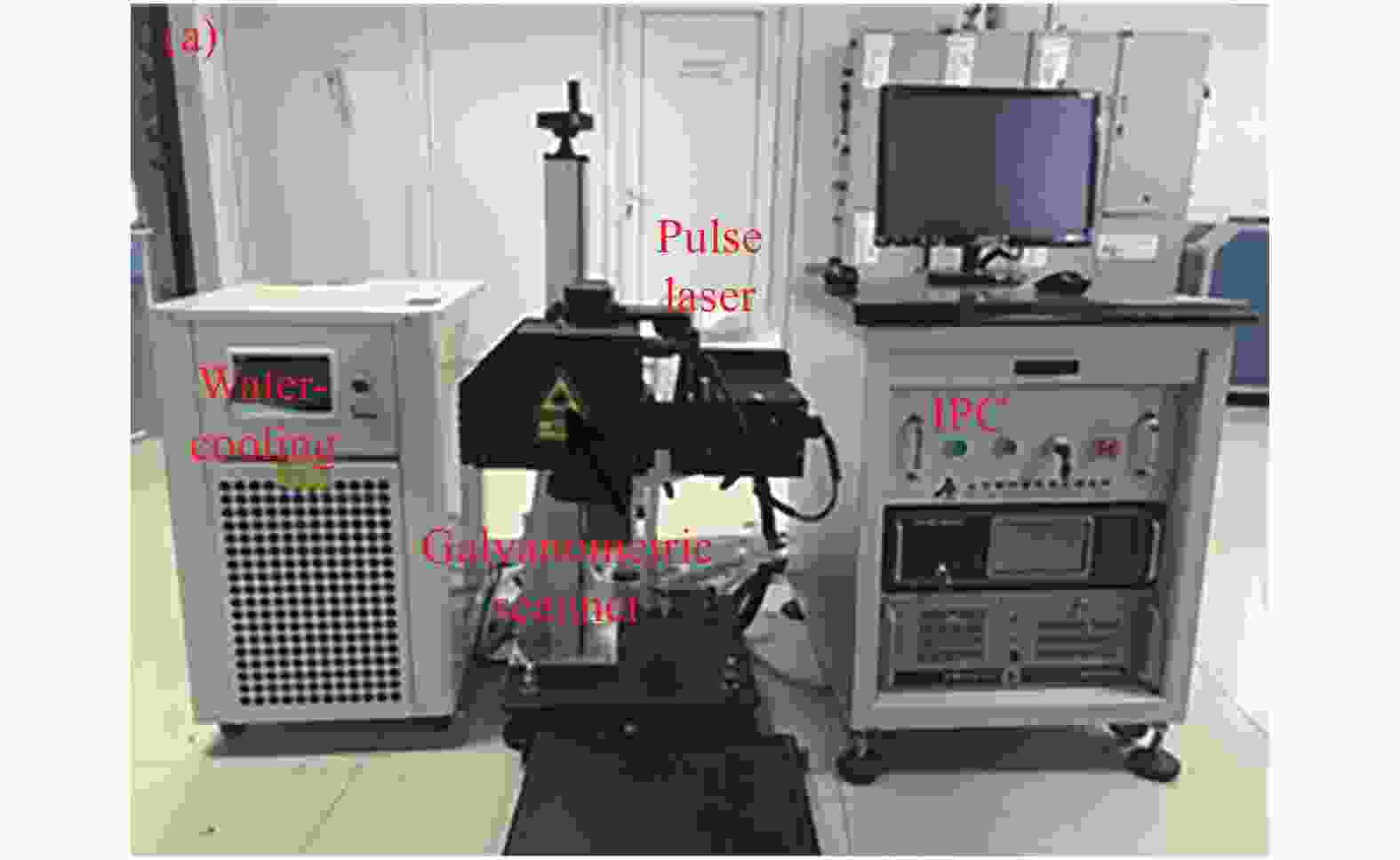
实验装置:水槽、移动滑轨、水听器、Nd:YAG固体激光器、振镜控制系统、聚焦透镜、数字示波器(带存储功能)、U盘。其中,Nd:YAG固体激光器的脉冲重复频率为1~10 Hz,脉冲宽度为10 ns,单脉冲能量最大值为200 mJ,实验中用来激励声波信号,接收声信号的是PZT水听器,带宽为1 MHz,然后通过示波器进行信号的识别与采集。
图4为实验装置示意图,其中图4(a)为激光超声系统,图4(b)为信号采集与处理装置。图4(b)中,1为水听器,2为移动滑轨,3为水槽,4为四通道数字示波器,5为Nd:YAG固体激光器,6为光触发电路。

Figure 4. Schematic diagram of the experimental device. (a) Laser-based ultrasonic system; (b) Signal acquisition and processing equipment
-
首先将移动滑轨放至水槽中固定位置并选择水槽中32 cm×34 cm的区域作为信号接收的有效区域,设定水槽中相对方向作为X轴与Y轴,方便实验过程中水听器以1 cm为单位分别沿X轴与Y轴步进。在工控机上设置激光脉冲能量强度与频率,固定激光器并调整光路,使激光打在水槽一侧的水中。打开数字示波器调整相应参数,将触发电路连接至示波器通道1并保证工作状态稳定,水听器连接至示波器通道3以便于转换后的声信号进行波形显示。图5所示为实验装置原理框图。

Figure 5. Schematic diagram of experimental device
-
激光器以5 Hz的频率向水中稳定发射激光脉冲。图6为实验过程详细记录图。水听器以(5,15)为起点沿Y轴以1 cm为单位步进,在步进至(5,48)时到达实验区域边缘停止步进。此时回到(5,15)处沿X轴向右以1 cm为单位步进至(6,15)处,再沿Y轴以1 cm为单位逐次步进,以此类推,每当步进1 cm即记录一次信号数据并保存至U盘,最终完成对水槽中32 cm×34 cm的有效区域进行逐点采集数据,共计1088组。图6中蓝色箭头标志为水听器步进方向,A点上方为激光器发射激光脉冲的位置。实验过程的三维示意如图7所示,其中P表示激光脉冲发射点,T表示激光激励声波点,R表示水听器信号接收点。

Figure 6. Record diagram of experimental process

Figure 7. Three-dimensional diagram of the experimental process
-
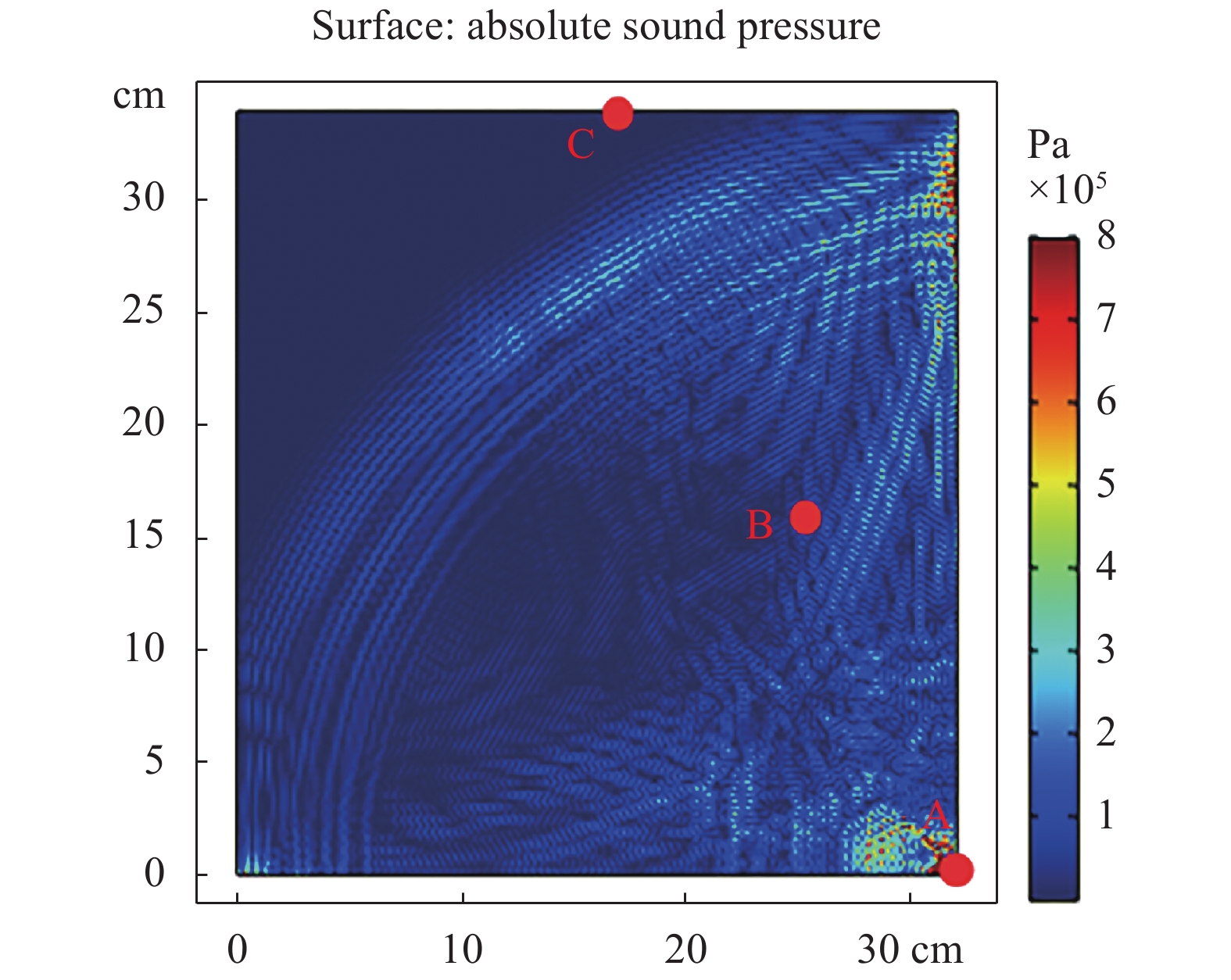
将水听器在各个位置直接接收到激光致声信号(激光脉冲一次回波)利用数据分析软件提取时域信号的峰-峰值进行三维成像处理(见图8),直观地推算出光声信号转换后所模拟出的最佳探测区域。

Figure 8. Signal peak 3D imaging curved surface
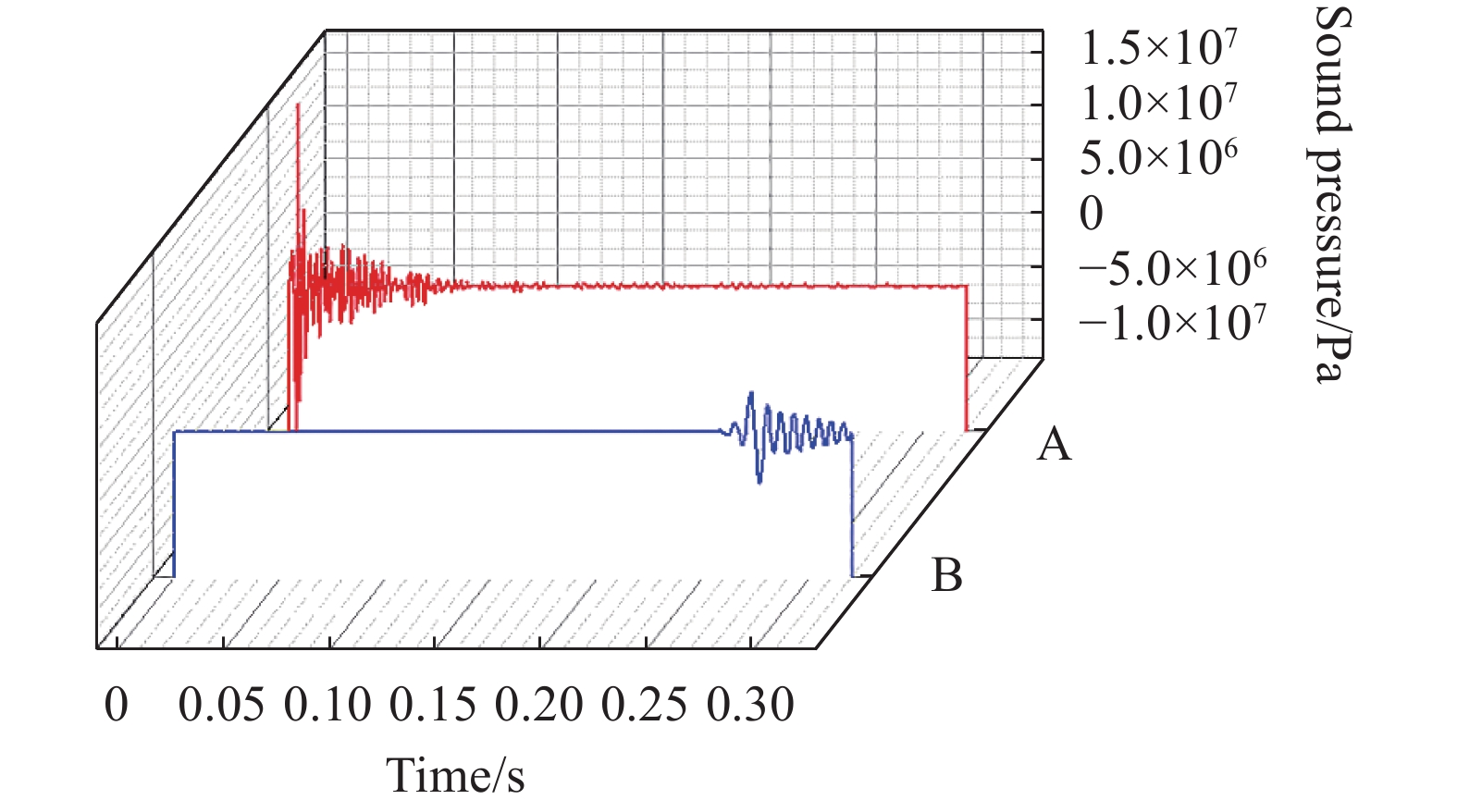
在信号处理过程中,选取了三组典型实验数据并在时域内进行了分析,分别为图6中标注的A(17,48)、B(23,30)、C(36,22)三点。其中A点坐标位置为接收信号最强的区域,B点次之,C点坐标位置所接收到的信号极为微弱。A、B、C三点在空间中大致呈现以k为斜率的直线分布,且信号峰值大小逐点降低,这在一定程度上反映出了水听器接收信号的规律特点。由于横波无法在液体中进行传播,水听器仅能接收到纵波,在图8不难发现正垂直且距离激光脉冲激励点近的信号接收效果较好,这与理论预期相吻合。图9为坐标位置A、B、C处水听器接收激光脉冲信号时域内的波形显示。

Figure 9. A, B and C receive the laser pulse signal waveform
为更加直观地了解声波频率范围,对典型水中激光致声信号进行快速傅里叶变换得到激光声信号频谱图,由图10可以看出激光声的主频大约为113 kHz。

Figure 10. Spectrum of laser-induced acoustic signal
-
为研究水听器接收激光声信号随声距变化的漂移情况,选取了A~D和A~E的实验测量记录过程中各10组典型波形数据进行分析,其中选取的A、D、E位置坐标和移动变化过程如图6所示。绘制了如图11(a)、(b)所示的信号随声距变化而漂移的示意图。通过计算各接收点之间的实际物理距离与实验中计算出理论声距之间的关系可以对声波信号随声距变化的漂移情况进行验证。各接收点声距差
$\Delta S$ 的计算公式为:
Figure 11. Diagram of signal drift of A-D and A-E with sound distance change. (a) A-D signal drift; (b) A-E signal drift
式中:
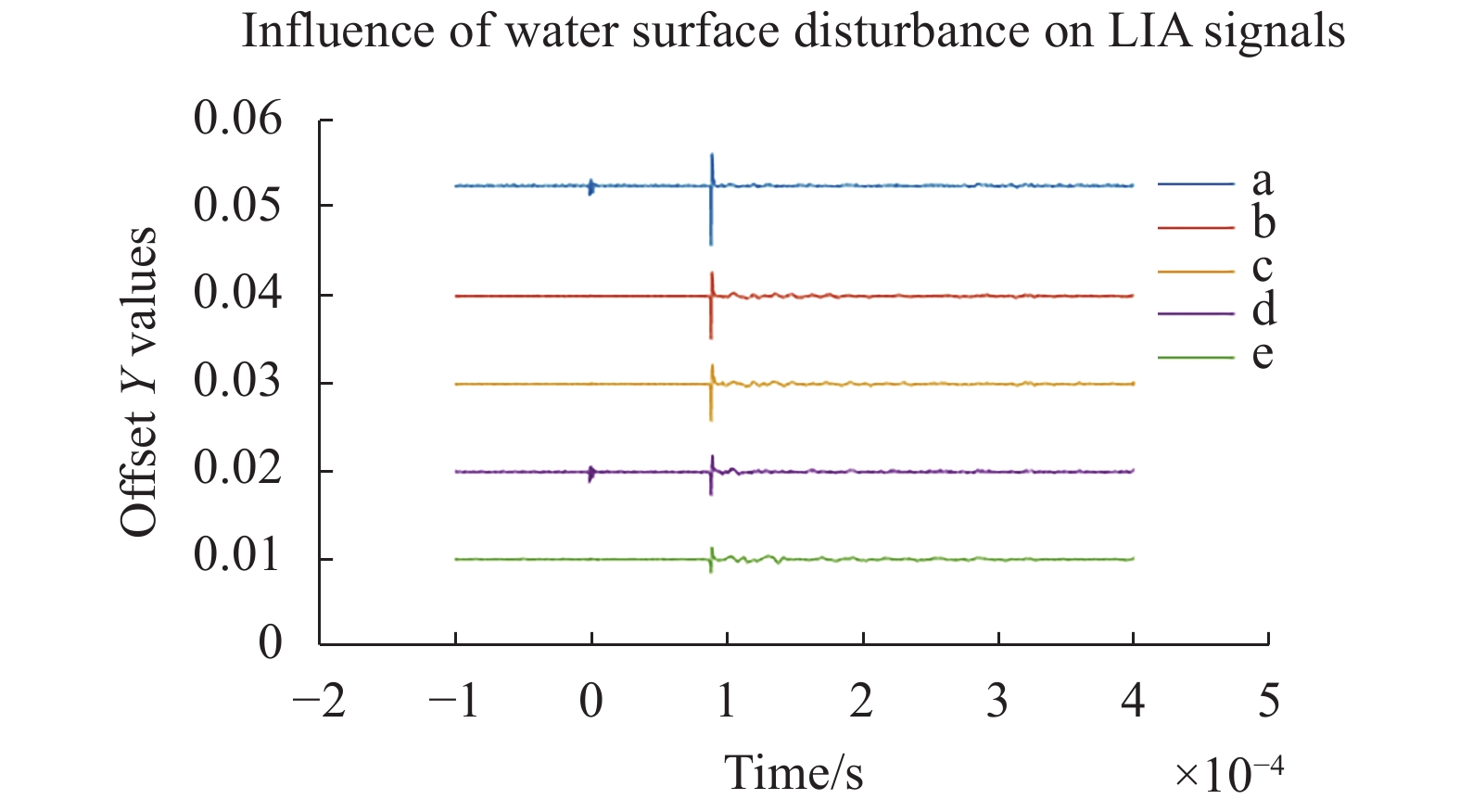
$c$ 为纵波在水中的传播速度,大约为1480 m/s;t1和t2分别为在不同坐标处测得的信号峰值时间。在A~D信号变化过程中,测得A点(17,48)处信号峰值时间t1为90 μs,D点(17,30)处信号峰值时间t2为214 μs,根据公式(9)可以计算出A、D两点之间的声距 $\Delta {S_1}$ 约为0.1835 m。A~E的信号变化过程中同理计算出A、E两点之间的声距$\Delta {S_2}$ 约为0.2664 m。其中A、D两点之间测得物理距离约为0.18 m,A、E两点之间测得物理距离约为0.2545 m,因此可以说明实验过程中测得的声信号随着水听器与激光脉冲之间的距离变化是规律且有效的。从A~D点和A~E点的变化过程可以发现,由于水听器逐渐向远离激光脉冲位置移动,其声距也随之变长,在波形图上展现为信号一次波峰出现的时间规律性滞后且波峰幅值明显变小,这与理论预期结果相吻合。为考虑在海洋实际应用中波浪面和斜面等因素对激光致声信号的影响,人为地对水面进行扰动来观察信号时域波形变化。从图12(a~e)表示扰动依次增大)中可以看出,随着扰动幅度变大,激光致声信号一次波峰变小,对信号有较大干扰,在实际应用中应考虑水面扰动带来的影响。

Figure 12. Influence of water surface disturbance on LIA signals
-
为验证上述实验过程的正确性,利用有限元软件对激光在液体中激励声波并传播的过程进行模拟与仿真,利用边界探针提取声波传播过程中的声压分布信号并进行成像处理,通过对数据进行计算与分析来验证实验结果。
首先在有限元分析软件中建立求解声学问题的相关方程,公式(10)为亥姆霍兹控制方程:
式中:
${\rho _c}$ 为密度;${p_b}$ 为背景场压力;$p$ 为声压;${p_t}$ 为总压力;$c$ 为声速;${q_d}$ 为偶极声源;$\omega $ 为角频率;${k_{eq}}$ 为波数。声传播损失的计算如公式(13)所示:
式中:
$p(r,{\textit{z}},\omega )$ 为声压;${p_{ref}}$ 为参考声压,这里取几何模型中距声源1 m处的声压。对于流体而言,声能流密度在频域上的定义如公式(14)所示:
声能量的强度与传播方向公式为:
式中:
${I_r}(\omega )$ 、${I_{\textit{z}}}\left( \omega \right)$ 分别为水中$r$ 方向和${\textit{z}}$ 方向的声能量强度;${v_r}\left( \omega \right)$ 、${v_{\textit{z}}}\left( \omega \right)$ 分别为水中$r$ 分量和${\textit{z}}$ 分量的声速;$p\left( \omega \right)$ 为水中声压。图13为有限元软件中建立的仿真模型,其中A、B、C三点对应实验过程中(见图6)激光在液体中激励声波的位置,在A点的上方设置用于接收声波信号的边界探针,通过分析探针接收的声压信号对实验结果进行反向验证。这样相当于脉冲激光器在不断地移动并发射激光进行扫查,而接收信号的水听器位置不变。将探针接收到的激光在A、B、C三点所激发出的声波信号进行对比分析,从而验证之前推论的正确性。图14即为分别在A、B、C三点进行激光激励时探针接收到的声压信号对比。

Figure 13. Finite element model of LIA

Figure 14. Comparison of sound pressure signals received by the probe
由边界探针所接收的声压信号分布可以分析:A、B、C三点的声压幅值依次大幅减小,验证了距离激光脉冲激励点近信号接收效果较好的分析。而且其声波信号存在明显偏移,信号峰值出现的时间滞后,随之声距变长且信号幅值大幅降低。
在此次实验中设置激光器脉冲重复频率为5 Hz,脉冲宽度10 ns,能量计测得脉冲能量值为50 mJ,由能量密度计算公式得到激光脉冲能量约为1.59×108 W/cm2,已达到水的介电击穿阈值并在实验中实现了对米级探测区域声波传播的成像与分析。在现有激光器可实现的条件下,提升脉冲能量至2.8×1010 W/cm2,仿真计算声波在水中传输400 m经吸收衰减后的声压信号,并与激发点处的声压信号进行对比分析。图15为利用边界探针接收到的激光激发处与接收处声压信号。

Figure 15. Sound pressure signals at laser excitation and reception
声波在传输400 m后仍能检测到明显的声压信号,计算其信噪比约为11.3 dB,证明了实现百米级传输及探测的可能性。当激光能量继续提升,传输距离继续增大时,激光声信号能量主要集中于低频段,声波激励的能量增强不明显而且可能导致更复杂的激励机制,因此文中仅作如上分析。
-
研究结果表明:在激光脉冲能量为1.59×108 W/cm2的实验条件下,可以实现距离约0.3 m的激光致声探测成像。垂直且距离激光脉冲激励点近的信号接收效果相对较好,随着水听器向正垂直激光脉冲激励点两侧偏移,信号开始产生衰减。根据水下声传播环境,采用脉冲激光器可实现水声探测,实验利用激光器与水听器可以有效实现光声信号间的转化。另外,还可通过增大激光脉冲能量使得转换的声波能量增强从而利于水下探测效果的提升,当通过仿真将脉冲能量提升至2.8×1010 W/cm2时,声波在传播400 m后仍能检测到有效信号从而验证了实现百米级传输及探测的可能性。但此时信号的高频部分已经因衰减而损失,在进行空-海远程通信时需要考虑这一影响,选择低频段分量进行实际应用。
通过模拟激光致声空海遥测的实验研究,验证了激光致声水下探测的可行性。通过有限元的模拟仿真也对实验的理论推测进行了反向验证,理论与实践互相辅证从而保证最终结果的正确、有效。此外,激光致声遥测技术将激光与声波信道的物理场结合也说明了用于空-水跨介质通信的潜力。声波信号的产生与激光脉冲信号的特性也密切相关,通过对激光脉冲信号进行调整与控制可以在一定程度上对转换的激光声信号特性进行改变从而满足特定的探测要求。
综上,激光致声空海遥测是目前较为先进的海洋探测技术,具有远距离传输、灵活机动、穿透能力强且衰减小、适用于恶劣环境等优势,此外本技术在空中至水下目标的通信与信息传输及生物医学光声成像领域[19-20]亦有十分广阔的应用前景。
Research on laser induced acoustic detection of trans-media aerial-underwater
doi: 10.3788/IRLA20200310
- Received Date: 2020-08-14
- Rev Recd Date: 2020-09-29
- Publish Date: 2021-05-21
-
Key words:
- laser induced acoustic /
- 3D imaging /
- time domain analysis /
- finite element simulation
Abstract: Remote detection technology between air platform and underwater is a hot research issue in the marine countries. The aim of the present work is to study the laser induced acoustic (LIA) technology used for the detection from air to underwater. The experiment and simulation of LIA detection based on the mechanism of laser-induced breakdown were mainly described. Nanosecond pulse laser was used to generate acoustic wave by the photoacoustic conversion, and the hydrophone was used to receive the waves. LIA scanning data was collected to analyze the character of acoustic source underwater by using the setup above. Then 3D imaging of LIA underwater was carried out based on the time reciprocity principle. Simulations of the sound waves generation and propagate underwater was performed by finite element method. Furthermore, it is observed from the simulation that sound signal can be still obtained after it propagates 400 m, when the laser energy increases to 2.8×1010 W/cm2. The signal to noise ratio is about 11.3 dB. The simulation shows the possibility of detection by LIA underwater in hundred meters-level. The present study provides a method for the remote detection underwater across air-water media by using LIA technology.




































































 DownLoad:
DownLoad: