







-
为了适应与满足复杂多变的应用环境需求,无人机载光电瞄准系统需要多载荷一体化,来提高无人机对目标的辨别打击能力。目前,机载双波段共口径系统前置光路更多的采用反射式成像,同轴反射存在中心遮拦能量低、离轴反射存在加工装配难度大的问题,折射式成像应用较少。在无人机光电瞄准系统方面的研究,以色列、美国早于其他西方国家,国内起步较晚。以色列最早的“先锋”无人机配备了四种光电传感器,最先做到多载荷一体化,以及美军MQ-9“捕食者”无人攻击机采用雷神公司研发的MTS-B多光谱瞄准转塔,光电传感器采用共孔径设计[1]。2015年,Han等[2]设计了一款共口径可见/中波红外/长波红外折反系统,该系统为一种经典的卡塞格林结构,焦距分别为880、880、220 mm,视场分别为0.86°、0.8°、3.2°,F数分别为4.3、4.3与1.3。由于采用卡塞格林结构,存在中心遮拦、能量低的问题。2016年,Alaaeldin Mahmoud等[3]设计了一款共口径可见/短波红外共折射光学系统,焦距为150 mm,视场为10°,F数为8.7。满足无人机遥感成像的质量以及体积、重量小的要求。2018年,电子科技大学曾钦勇[4]采用R-C卡塞格林结构设计了一款共口径可见/中波制冷红外折反式光学系统,应用于快速空天平台光电远程探测,但该系统存在中心遮拦、能量低等问题。2019年,长春理工大学尹骁[5]设计了一款分孔径可见偏振与长波红外两档变焦成像,应用于特殊案发现场对物证的搜寻,但该系统不能解决两个双波段系统光轴一致性的问题。
文中设计了一款可见/中波制冷型红外共口径折反式成像系统应用于机载光电瞄准系统,前置光路采用折射式成像,该系统可实现大范围对目标的搜索、小范围对目标的识别,同时,该系统能够在昼夜交替、烟雾密集的工作环境下发挥可见/红外成像的优势,实现两波段之间无需切换镜头一起对目标进行搜索,达到高成像性能的技术要求,即对目标实现精确探测与识别。
-
变焦光学系统是解决大视场搜索、小视场识别的最佳方案。文中采用机械补偿变焦方式,变倍组作线性移动,补偿组沿光轴作相应的移动,补偿像面位置稳定。
变焦光学系统的变倍比[6]:
式中:
${\;\beta _{\rm{2}}}$ 、${\;\beta _{\rm{3}}}$ 和$\;\beta _{\rm{2}}^{\rm{*}}$ 、$\;\beta _{\rm{3}}^{\rm{*}}$ 是变焦前后变倍组与补偿组的垂轴放大率。由物方截距等于物距与物方焦距之和以及像方截距等于像距与像方焦距之和,再结合倍率公式,可推导出变倍组与补偿组的垂轴放大率为:式中:
${f'_1}$ 、${f'_{\rm{2}}}$ 与${f'_{\rm{3}}}$ 分别是前固定组、变倍组与补偿组的焦距;dS12是前固定组与变倍组之间的间隔;dS23是变倍组与补偿组之间的间隔。为了保持像点位置不变,变倍组的物点与补偿组的像点之间的距离D为常量:式中:
${l_2}$ 、${l'_2}$ 与${l_{\rm{3}}}$ 、${l'_{\rm{3}}}$ 分别是变倍组与补偿组变焦前的物方截距与像方截距。结合理想光学系统的高斯公式,可得变倍组的物点与补偿组的像点之间的距离D为:同理,可得变焦后变倍组的物点与补偿组的像点之间的距离D*为:
为了保持变焦后像面位置稳定不变,则D=D*。则
$\beta _{\rm{2}}^{\rm{*}}$ 与$\beta _{\rm{3}}^{\rm{*}}$ 之间的关系为:将上式改写为:
公式(8)中,b满足:
对公式(6)求导,可以得出补偿组的放大率变化曲线极值发生在变倍组的放大率等于−1。设变倍组规范化焦距
${f'_{\rm{2}}} = - {\rm{1}}$ ,$\;\beta _{\rm{2}}^{\rm{*}} = - {\rm{1}}$ ,将公式(3)代入公式(9),化简可得:式中:
$A = 1 - {\beta _2} + {d_{S23}}$ ;$E = 3 + \dfrac{1}{{{\beta _2}}} + {d_{S23}}$ 。文中采用的是负组变倍正组补偿的变焦方式,所以补偿组的焦距应满足:
或
-
该系统工作在大气能见度大于10 km、相对湿度小于60%的环境中,对地面目标进行探索与识别。成像系统的焦距和探测距离之间的关系满足:
式中:R为光学系统对目标的探测、识别距离;H为目标尺寸;
$f'$ 为光学系统的探测、识别焦距;N为探测、识别目标的像元数(由跟踪要求给出,最小目标跟踪尺寸为:3×3);d为探测器的像元尺寸。根据设计指标,该双波段可见光成像系统对目标的探测距离大于12 km、识别距离大于5 km;红外成像系统对目标的探测距离大于5 km、识别距离大于2.5 km。
由于光学系统应用环境的特殊性,可见光成像系统选择具有高分辨率的CMOS探测器,像元数为2 464×2056,像元大小3.45 μm;红外成像系统选择制冷型探测器,像元数为640×512,像元大小16 μm,冷光阑距离19 mm。在不考虑内部因素对分辨率影响的前提下,可见光系统取145 lp/mm作为评价可见光系统的最大空间截止频率;红外系统取32 lp/mm作为评价红外系统的最大空间截止频率。
光学系统参数如表1所示。
Visible MWIR Band/μm 0.38-0.76 3-5 F number 4 4 Zoom ratio 5× 3× Field angle/(°) 3.6-17.5 20.5/10.47/6.7 Focal length range/mm 36-180 36/72/108 Detection distance/km 12 5 Identify distance/km 5 2.5 Table 1. Optical system parameters
-
根据系统设计指标要求,可见光系统的变倍比M1=5,中波红外系统的变倍比M2=3。
设变倍组规范化焦距为−1,取前固定组焦距为4,短焦位置时前固定组与变倍组之间的距离为0.5以及变倍组与补偿组之间的距离为2.5,则由公式(2)可计算出短焦位置时变倍组的放大率为−0.4。此时,A=3.9,E=3。由公式(11)、(12)可计算出补偿组焦距的取值范围为:
${f'_3} \leqslant 1.165\;6$ 或$2.509\;4 \leqslant {f'_3} < 3.833\;3$ 。取补偿组焦距为1.1656,由公式(3)可计算出补偿组的放大率为−0.4263。取b=−2,可得变焦后补偿组的放大率等于−1。则可知该系统放大倍率M1=5.8644,接近实际变焦系统变倍比值5。则短焦焦距为0.6821,按短焦实际要求36,放大倍率为52.7782。将每个参数值放大52.7782倍,可以得到前固定组焦距为211.1128、变倍组焦距为−52.7782、补偿组焦距为61.5183、前固定组与变倍组之间的距离为26.3891以及变倍组与补偿组之间的距离为131.9455。
同理,设中波红外系统变倍组规范化焦距为−1,取前固定组焦距为3,短焦位置时前固定组与变倍组之间的距离为0.2以及变倍组与补偿组之间的距离为2.5,计算过程同可见光系统一致。则可知该系统放大倍率M2=2.8902,接近实际变焦系统变倍比值3。则短焦焦距为1.038,按短焦实际要求36,放大倍率为34.682。将每个参数值放大34.682倍,可以得到前固定组焦距为104.046、变倍组焦距为−34.682、补偿组焦距为53.9825、前固定组与变倍组之间的距离为6.9364以及变倍组与补偿组之间的距离为53.9825。
将计算的各组参数代入光学设计软件,并用理想透镜组进行模拟,结果如图1所示。

Figure 1. Ideal lens group construction
-
根据3.1节中理论计算部分,搭建出可见光成像与红外成像系统的前固定组、变倍组与补偿组。可见光成像系统的前固定组由分光板后的第1、2、3透镜组成,变倍组由第4、5、6、7透镜组成,补偿组由第8、9、10、11透镜组成以及后固定组由第12、13、14透镜组成。红外成像系统的前固定组由反射镜后的第1透镜组成,材料为硅,变倍组由第2透镜组成,材料为锗,补偿组由第3、4透镜组成,材料为硅与硒化锌,后固定组由第5、6透镜组成,材料为硒化锌与锗。共口径部分采用一片红外材料CaF2,实现双波段共口径成像,提高双波段对目标信息观测的一致性。光束到达分光板,通过截止滤光片,可见光波段的光束透过分光板进入可见光成像系统,中波红外波段的光束反射90°到达反射镜,然后再反射90°进入中波红外成像系统。利用光学设计软件优化后,光学系统的结构图如图2所示。

Figure 2. Optical system structure diagram
-
综合使用几何光学与衍射理论两种评价方法来评价成像系统的性能,判断成像系统是否满足设计指标要求。
可见光成像系统点列图如图3所示,短焦位置处弥散斑的最大均方根半径为1.878 µm,长焦位置处弥散斑的最大均方根半径为2.702 µm,两个焦距位置处的均方根半径值均小于3.45 µm,在一个像元大小以内,满足成像质量要求。

Figure 3. Spot diagram of visible light imaging system
可见光成像系统调制传递函数如图4所示,在奈奎斯特频率145 lp/mm处,各焦距处不同视场的MTF值大于0.5,接近衍射极限,满足成像质量要求。

Figure 4. Modulation transfer function diagram of visible light imaging system
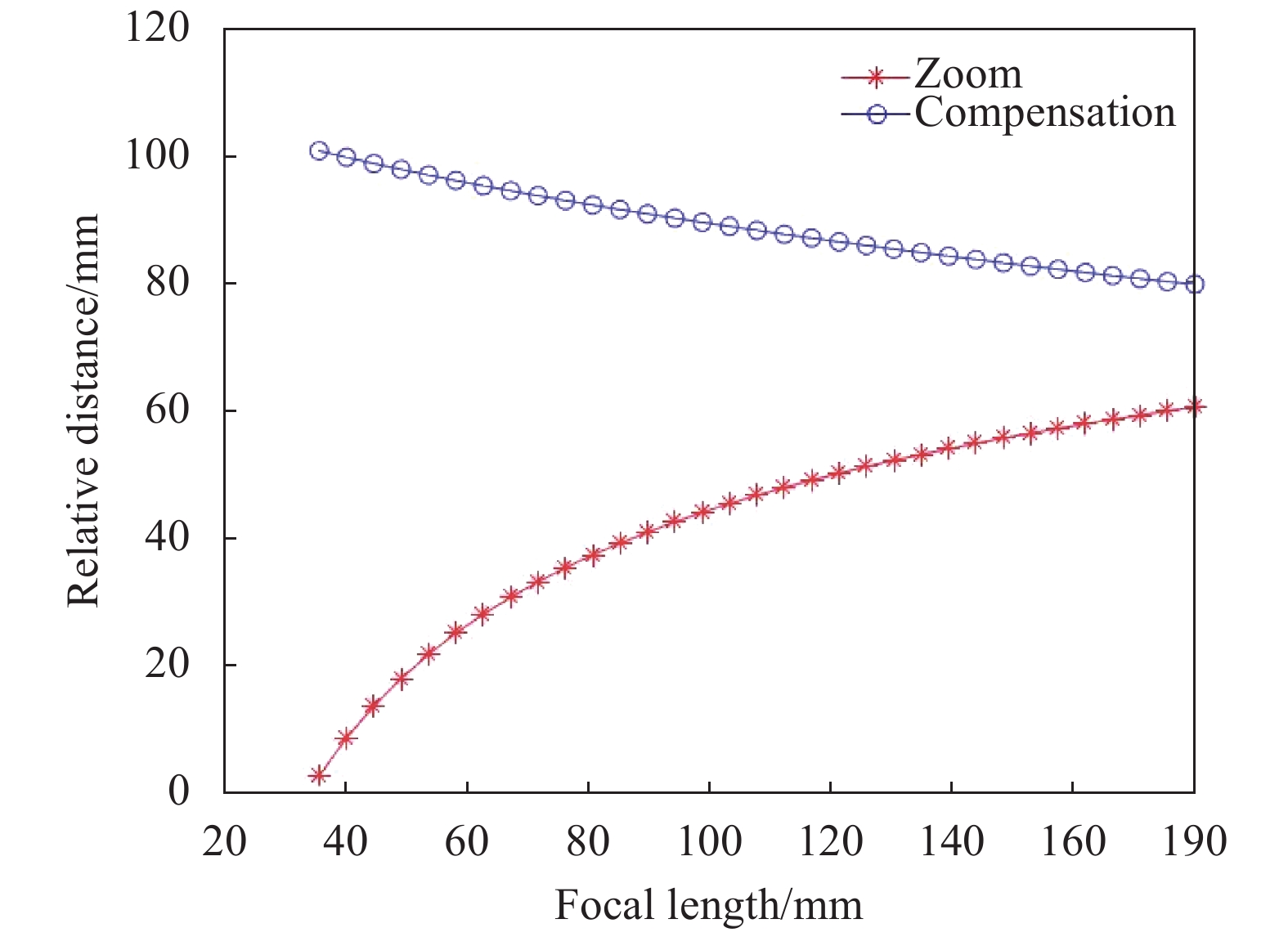
模拟变倍组与补偿组的变焦曲线,结果如图5所示。横坐标代表系统焦距,纵坐标代表变倍组与补偿组相对前固定组的距离,两组运动轨迹曲线平滑无拐点,变倍组的最大行程为57.801 mm,补偿组的最大行程为20.887 mm。

Figure 5. Zoom curve of visible light imaging system
-
中波红外成像系统点列图如图6所示,短焦位置处弥散斑的最大均方根半径为7.210 µm,中焦位置处弥散斑的最大均方根半径为8.848 µm,长焦位置处弥散斑的最大均方根半径为10.306 µm,三个焦距位置处的最大均方根半径值在一个像元大小(16 µm)以内,满足成像质量要求。

Figure 6. Spot diagram of mid-wave infrared imaging system
中波红外成像系统调制传递函数如图7所示,在奈奎斯特频率32 lp/mm处,都达到衍射极限,满足成像质量要求。

Figure 7. Modulation transfer function diagram of mid-wave infrared imaging system
-
光学系统工作环境的不可预知性与复杂性会使得系统在高低温环境中发生离焦现象。因此,为了保证光学系统的成像质量,需对系统在工作环境温度−40~60 ℃下做高低温处理。目前,无热化的处理方法有机械被动式、机电主动式与光学被动式三种,考虑到系统轻量化,在光学系统中引入特殊面型,采用光学被动式做无热化处理。
表2是可见光系统的短焦36 mm、中焦108 mm与长焦180 mm在高低温环境中产生的离焦量。
Temperature/
℃Short focal/
mmMedium focal/
mmLong focal/
mmVisible −40 36.012 107.859 180.229 20 36.003 108 179.997 60 35.996 108.085 179.622 Table 2. Visible light system focal length changes with temperature
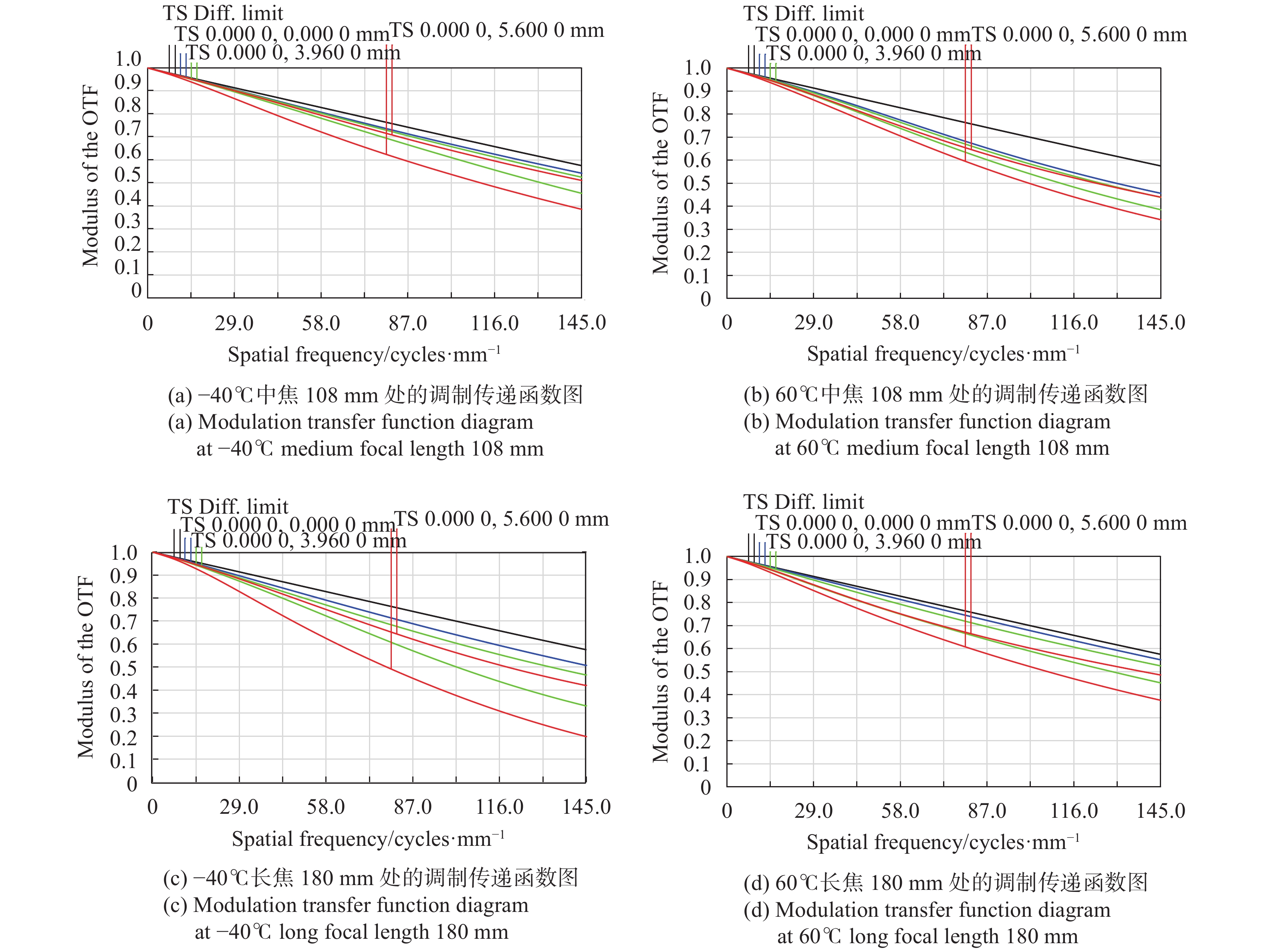
从表2中可知,中焦、长焦部分的离焦量最大。图8给出了可见光成像系统在−40~60 ℃的工作环境中,消热差后的调制传递函数图。从图8(a)、图8(b)可以看出,在中焦108 mm处消热差后,系统的MTF值大于0.4;在长焦180 mm处消热差后,从图8(c)可以看出系统的MTF值大于0.3,从图8(d)可以看出系统的MTF值大于0.4,满足系统的成像质量要求。

Figure 8. Modulation transfer function diagram of visible light imaging system at −40 ℃ and 60 ℃
由焦深公式可算出中波红外系统的焦深值为0.128 mm。表3给出了中波红外系统短焦36 mm、中焦72 mm与长焦108 mm处焦距随温度变化的离焦量。
Temperature/℃ Short focal/mm Medium focal/mm Long focal/mm MWIR −40 36.129 71.766 107.185 20 35.998 72.018 107.997 60 35.911 72.190 108.540 Table 3. Mid-wave infrared system focal length changes with temperature
图9给出了中波红外成像系统在−40~60 ℃的工作环境中,消热差后的调制传递函数图。从短焦36 mm、中焦72 mm与长焦108 mm的−40 ℃与60 ℃的调制传递函数图可以看出,系统的MTF值略有下降,但总体MTF值大于0.2,满足成像质量要求。


Figure 9. Modulation transfer function diagram of mid-wave infrared imaging system at −40 ℃ and 60 ℃
-
为了确保系统的可行性,根据实际经验,对系统表面公差要求如下:曲率半径、厚度以及偏心公差±0.02 mm,倾斜公差±0.02°,表面不规则度为0.2;对元件公差要求如下:偏心公差±0.02 mm,倾斜公差±0.02°;对材料公差要求如下:材料折射率公差为±0.001,阿贝数公差为±0.5。利用蒙特卡洛分析所给定的公差,结果如表4所示。
Visible MWIR Probability MTF Probability MTF 90%≥ 0.21376904 90%≥ 0.22377023 80%≥ 0.24542885 80%≥ 0.24953061 50%≥ 0.28844132 50%≥ 0.28550645 20%≥ 0.35394512 20%≥ 0.30674293 10%≥ 0.39609408 10%≥ 0.31060533 Table 4. Tolerance analysis MTF value
从表4可以看出,对系统进行公差分析后,可见光系统有90%的概率保证MTF值在0.21以上,中波红外系统有90%的概率保证MTF值在0.22以上,满足系统加工装调的要求。
-
光学系统的探测距离是设计系统的重要依据,同时也是系统设计成功与否的一个重要评价指标。可见光系统探测性能与大气传输、目标背景特性、透过光学系统的能量以及探测器性能等有关。可见光光学系统的探测距离为[7]:
式中:ε为消光系数,可根据大气能见距离计算求得,ε=3.912/dv(能见度dv=10 km);E0为景物照度,取20 000 lx;ρ为目标反射率,取0.3;τ0为光学系统透过率,为74.83%;C为目标与背景的对比度,取0.45;F/4;Emin为探测器的最小靶面照度,取0.1 lx。则可见光光学系统的探测距离为12.67 km。
红外系统的探测能力与大气衰减、目标辐射强度、光学系统的透过能力以及焦平面阵列的性能等有关。依据最小可分辨温差(MRTD)和Johnson准则可预测红外系统的探测、识别与辨别能力。MRTD的一般表达式为[8]:
式中:SNRDT为探测概率50%时的阈值信噪比,取2.8;f为系统空间频率;NETD为噪声等效温差,取25 mK;MTF(f)为系统传递函数;β与γ为光学系统的水平瞬时视场与竖直瞬时视场;te为人眼积分时间,取0.2 s;fp为帧频,取60 Hz;Δfn为系统噪声等效带宽;τd为探测器的驻留时间。如图10所示,随着空间频率f的增大,MRTD的值越来越大。当MRTD的值趋于无穷大,则空间频率达到了红外系统的截止频率,也即达到了红外系统的极限频率。

Figure 10. Relationship between spatial frequency and MRTD
上述MRTD模型是在理想情况下得到的,实际应用环境还需考虑系统的观察等级(探测、识别、辨别)、不同探测概率下的阈值信噪比、实际背景温度以及大气分子的吸收散射,则MRTD模型改进为[9]:
式中:SNR为实际情况下的阈值信噪比;R为探测距离;H为目标高度;Tb为背景温度;Tm为目标温度;ne为目标等效条纹数;α为目标的高宽比;ti为探测器的积分时间;F为F数;τ0为光学系统的透过率,为77.07%;Ad为探测单元面积;ns为系统探测器元数;
$\displaystyle\int_{{\lambda _{\rm{1}}}}^{{\lambda _{\rm{2}}}} {\tau \left( {\lambda ,R} \right)} \cdot {D^*}\left( \lambda \right)\dfrac{{\partial {M_\lambda }}}{{\partial T}}{\rm{d}}\lambda$ 为辐射光束经过大气层的衰减程度评价指标。利用公式(16)可建立不同空间频率下,不同探测距离所对应的最小可分辨温差。图11给出了探测概率为50%,不同观察等级(探测、识别、辨别)下,不同的空间频率、不同的传输距离所对应的最小可分辨温差。表5给出了对目标的观察等级为探测的情况下,系统的调制传递函数值等于0.3时,对应空间频率f=3.15,不同探测距离下的最小可分辨温差。

Figure 11. Relationship between spatial frequency, transmission distance and MRTD
R/km 2 4 5 MRTD/mK 155.6746 311.3492 389.1865 Table 5. Detection distance and MRTD value
在空间频率f下,目标与背景的温差经过大气传输衰减后,到达红外系统的温差应该大于等于该空间频率下的MRTD值[10]。
式中:ΔT为目标与背景温差,取5.25 K;τα(R)为探测距离为R时的大气透过率。利用LOWTRAN软件,在1976美国标准大气模式下,边界层气溶胶(海拔0~2 km)、气象数据类型为海洋消光系数、VIS=10 km的情况下,计算得探测距离为5 km时,大气透过率为0.2196,则传播到红外系统的温差为1.1529 K,大于最小可分辨温差389.1865 mK,可以满足探测5 km的指标要求。
综上分析与计算,机载双波段共口径光电瞄准成像系统的可见光系统探测距离大于12 km,中波红外系统探测距离大于5 km,满足设计指标要求。
-
机载光电瞄准成像系统与地面目标之间存在相对运动,使得相机在成像过程中,相机对目标成的像与成像介质间产生像移[11]。像移的存在降低了系统的成像质量,使得图像分辨率下降,所以需要对光电瞄准成像系统进行像移补偿残差分析。当成像系统的焦距和探测器的像元尺寸一定时,前向像移补偿残差的大小取决于无人机飞行速度的精度、高度的精度以及相机的最大曝光时间。
像移补偿速度为:
对上式两边微分,可以得到像移补偿速度的误差为:
则前向像移补偿残差为:
设飞行速度为100 m/s、探测高度为2 km、速度精度为0.2 m/s、高度误差为5 m,则对于可见光系统,取最大曝光时间为30 ms,焦距为180 mm,前向像移补偿残差为1.215 μm;对于中波红外系统,取最大曝光时间为16 ms,焦距为108 mm,前向像移补偿残差为0.3888 μm。经过像移补偿后,像移补偿残差小于1/2的像元尺寸。根据瑞利判据可知,光电瞄准成像系统经像移补偿后,可实现系统对目标的有效探测与识别。
-
文中设计了一款机载双波段共口径光电瞄准成像系统。该系统前置光路采用折射式成像,可解决同轴反射成像存在中心遮拦、视场小,以及离轴反射成像装配难度大、结构复杂的问题。可见系统与红外系统在消热差后满足系统成像质量要求。在大气能见度大于10 km、相对湿度小于60%时,可见光系统的探测距离大于12 km;根据Johnson准则,对红外系统进行MRTD分析,系统在探测距离为5 km时的最小可分辨温差值满足探测距离大于5 km的设计指标要求,同时像移补偿残差分析表明该集成系统可对目标实现高分辨率成像。对系统作公差分析结果表明,满足加工及使用要求。
Design of airborne dual-band common aperture photoelectric aiming optical system
doi: 10.3788/IRLA20200322
- Received Date: 2020-08-21
- Rev Recd Date: 2020-10-19
- Publish Date: 2021-05-21
-
Key words:
- dual band /
- co-aperture /
- athermalization /
- MRTD
Abstract: Aiming at the problem of central obstruction and assembly difficulties in the reflective imaging of the airborne dual-band common-aperture photoelectric sighting system, a common-aperture optical system with front-light path refraction imaging was designed. The initial structure of the optical system was calculated using the two-component zoom theory. Based on the Minimum Resolvable Temperature Difference (MRTD) model, the operating distance of infrared system was analyzed, and the compensation residual error of forward image motion was analyzed according to Rayleigh criterion. When the airborne dual-band common-aperture photoelectric aiming optical system worked in the waveband of 0.38-0.76 μm, it can achieve 5× continuous zoom from 36 to 180 mm. When it worked in the 3-5 μm waveband, it can realize three fields of view transformations, and the ratio of the three focal lengths of the three fields is 3. The working F number was 4. The design results show that, in the working environment of −40-60 ℃, the optical system undergoes optical passive athermalization treatment, which meets the requirements of system imaging quality.































 DownLoad:
DownLoad: