






-
仿生复眼成像系统相比单孔径光学系统有诸多优势[1]:如大视场、无限景深、快速发现目标和识别等[2]。研究表明,许多昆虫的复眼在紫外线、红外线方面具有良好的成像效果[3]。宽光谱复眼可帮助昆虫在夜间或茂密的森林或其他弱光环境中捕获更多有效信息,对昆虫觅食、飞行导航有重要作用[4]。复杂条件下单波段复眼探测手段单一,为使复眼工作获取更多有效信息,科技人员从双波段出发对复眼展开探索。
美国Woong-Bi Lee等人提出一种被称为计算复眼的新型成像系统,该系统小眼具有较大的视场[5],可同时观察多条信息。日本Ayatollah Karimzadeh设计了新型凹面和平面重叠型复眼系统,实现了小体积成像且提高了成像分辨率和灵敏度[6]。中国科学院长春光学精密机械与物理研究所史成勇提出SCECam仿生复眼成像系统,利用中继转像系统抵消曲面微透镜阵列的失真,该阵列由117个直径3 mm、视场15°的子眼构成,系统视场角达135°[7]。天津大学庞阔等人利用传感器阵列与透镜阵列的垂直对应关系,设计了大视场仿生复眼成像系统,该系统由16个8.5 mm CCD传感器组成2×8的曲面阵列[8]。北京理工大学曹杰等人基于曲面相机阵列多分辨成像方法,采用11个相机镜头构建相机阵列,组成四个等级分辨率的子眼拍摄模块,实现了150°×37.8°的大视场多分辨成像特性[9]。微透镜阵列的形式多被采用,仿生复眼的小眼正是受限于孔径小导致视距变短,且微透镜设计复杂化了加工与装调。
文中设计了一款大孔径、多光谱仿生复眼结构,通过研究子眼系统与复眼系统之间的视场关系,建立了子眼与复眼系统视场拼接的几何模型,设计了共光路的子眼系统、圆周阵列子眼分布的模型以及同曲面子眼透镜阵列与转像系统相结合的仿生复眼系统。复眼系统的成像范围广,目标信息获取更全面,提高了系统图像采集的能力。
-
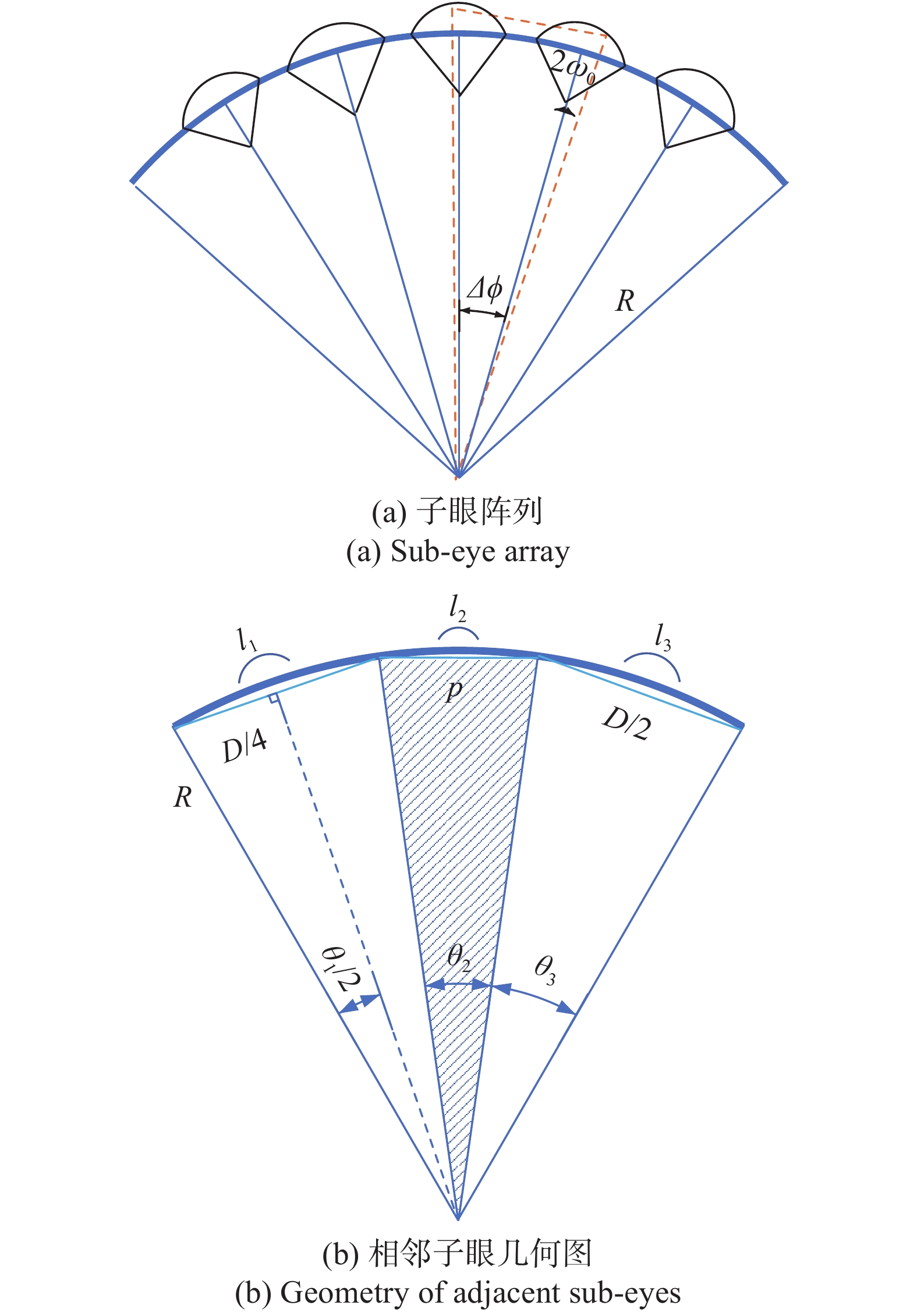
各子眼按圆周排布方式排列于曲率半径R的球面基底上,在球面基底分布着m个小透镜。每个小透镜称作复眼的一个子眼,子眼直径设为D,子眼的间隔记为p,相邻子眼的光轴夹角Δϕ将物空间分成若干个视场,每个子眼视场角为Δφ。Δϕ所对应的弧长分为三段,记为l1、l2、l3,,三段弧长对应的弦长为D/2、p、D/2,对应的圆心角为θ1、θ2、θ3。子眼阵列排布如图1(a)所示,图1(a)虚线框内所示相邻子眼几何图如图1(b)所示。

Figure 1. Schematic diagram of sub-eye array
由图1(b)得弧长与相邻光轴夹角的表达式为:
当θ较小时,公式(1)为:
据设计参数的要求,子眼透镜口径D=10 mm,相邻子眼间隔p=8 mm,根据公式(2)得球面基底半径不小于18∆ϕ−1 mm,然后分析视场拼接并确定∆ϕ,以确定最小基底半径。
-
复眼系统视场重叠与探测距离、子眼视场角和相邻子眼光轴夹角有关。为使获取的图像没有成像盲区,相邻子眼需满足一定重叠关系。子眼视场角为2ω0,相邻子眼光轴间夹角为Δϕ,两者关系示意图如图2所示。

Figure 2. Schematic diagram of the relation between the angle between the adjacent sub-eye axes and the sub-eye field angle
图2中,ω0为子眼半视场角,Δϕ为相邻子眼光轴夹角,α为重叠角。Δϕ与ω0的关系分析如表1所示。
Relationship Conclusion Δϕ=0 The optical axes are parallel to each other, and the total field of view of the system is close to the size
of the field of view of a single aperture0<Δϕ<ω0 The outer two fields of view of the three adjacent subeyes meet at infinity, and the detection range of
the middle sub-eye and the adjacent sub-eyes completely overlapΔϕ=2ω0 The edge field of view of adjacent subapertures is parallel, there is a gap at infinity, and there is a
blind spot in the field of viewΔϕ>2ω0 The peripheral fields of view of adjacent sub-eyes do not overlap, so there must be a blind spot Table 1. Relation between the angle between the adjacent subocular axes and the half-field angle of the sub-eye
综和表1所述,在不产生盲区又不重叠太多视场的情况下,相邻光轴夹角、重叠角以及子眼视场角的关系为:
-
(1) X方向视场拼接
以四组元复眼系统X方向视场拼接为例,X方向的成像原理示意图如图3所示。通过定义纵向的子眼数目n来表示复眼系统的成像模式。当n=0时,表示中心子眼;当n=1时,以Z轴为基准,将中心子眼光轴绕Y轴旋转Δϕ1,得到第一阵列子眼位置。以此类推,得到第二、三阵列子眼位置。O0、O1、O2和O3为纵向各子眼所在位置。O0、O1、O2和O3位于半径为R的基底上,其中O为基底的圆心,同时是相邻子眼光轴交点。所有子眼光学特性参数相同,记ω0、ω1、ω2和ω3分别为各阵列的半视场角,其中ω0=ω1=ω2=ω3。复眼系统在X方向的所有子眼同时工作,完成对视场范围内目标的探测。
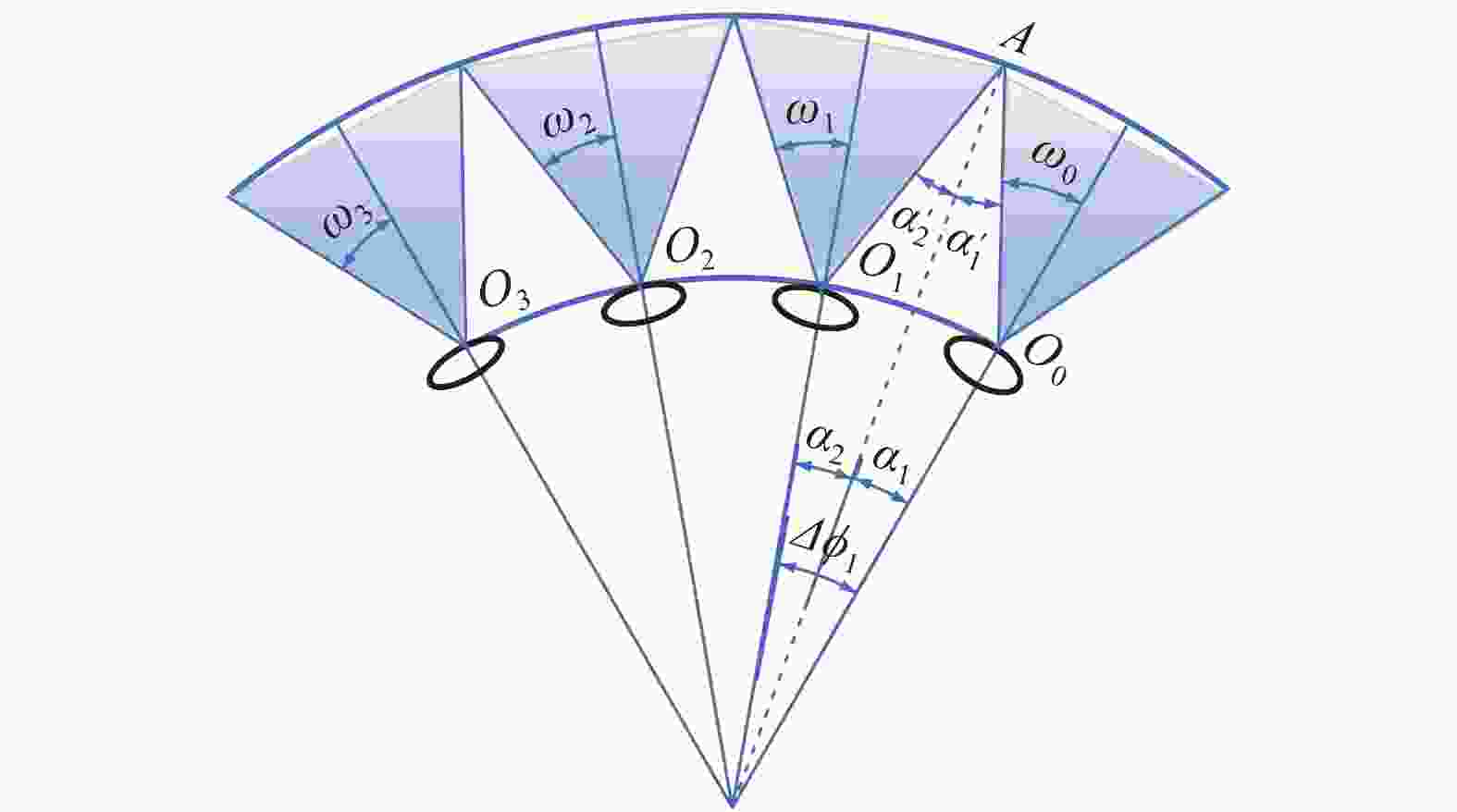
Figure 3. Schematic diagram of X-direction imaging principle
图3中,A为中心子眼与第一阵列子眼在探测距离L处视场密接点,连接点O与点A,OA与OO1的夹角为α1,与OO0的交点为α2,与O1A的交点为α1',与O0A的交点为α2'。当探测距离较远时,基底的曲面半径近乎垂直于光线,可以假定光线平行入射到子眼,故α1',α2'近似为零。从图3中得出:
相邻子眼光轴夹角为:
由公式(5),确定仿生复眼光学系统半视场角为:
式中:n为系统所需阵列数。相邻子眼光轴夹角与子眼视场角之间的关系是影响复眼光学系统整体结构的重要因素。指标要求复眼系统视场不小于100°。根据公式(6),复眼透镜全视场角的计算方法以及子眼透镜视场角和相邻子眼光轴夹角的关系得:
式中:m为X方向子眼数目;ω为复眼半视场角;ω0=10°。由公式(3)、(7)得:∆ϕ∈(11~13)时,m取9;∆ϕ∈(14~19)时,m取7。考虑光学系统体积以及利用率的情况下取∆ϕ=16°,X方向阵列数为4,即系统包括中心子眼一共有四层子眼阵列,2ω=116°。根据公式(2)求得最小基底半径为65 mm。
(2) Y方向视场拼接
Y方向是指复眼曲面以中心子眼为圆心,半径恒定的圆周方向。当确定好X方向排列的子眼位置后,以X方向各子眼位置为基准在圆周方向所确定的子眼排列顺序即为Y方向子眼排列方式。X方向子眼排列确定了仿生复眼系统的总视场,而Y方向子眼正确排列可以保证所有子眼同时工作,探测到视场范围内完整的图像信息。Y方向视场拼接就是在临界条件无盲区的情况下确定周期子眼数Ni。
根据几何光学成像原理,探测器的靶面形状决定了探测区域为一个X×Y的矩形区域,ωix为第i阵列子眼在弧矢面上的视场角,ωiy为第i阵列子眼在子午面上的视场角,两者的关系为:
式中:L为复眼探测距离。设第i阵列系统的视场角为Wix,则:
当探测距离为L时,复眼系统的视场为圆形。假定其半径为R,球面周长为C,每个环上相邻子眼的边缘视场连接,作为一个Y视场的临界拼接条件,所以有:
根据几何光学的基本原理得子眼周期数:
又因为:
公式(13)即为仿生复眼系统在Y方向上的拼接方式,以X方向为基准,中心子眼为圆心,确定每个阵列的子眼个数,将这些子眼进行周期排列可以保证复眼系统在探测距离为L的情况下视场拼接无盲区。将参数代入公式(13):中心阵列子眼i=0,得到中心阵列子眼周期数Ni=1;第一阵列子眼i=1,得到第一阵列子眼周期数Ni=8;第二阵列子眼i=2,得到第二阵列子眼周期数Ni=12;第三阵列子眼i=3,得到第三阵列子眼周期数Ni=16。经计算,子眼的数量为37。
得到文中要设计的参数如表2所示。
Parameter Value Field of view, FOV/(°) 116 Aperture of sub-eye, D/mm 10 Angle of adjacent sub-eye, ∆θ/(°) 16 Number of sub-eye 37 Radius of base layer, R/mm 65 Table 2. Optical system parameters of bionic compound eye with curved surface
-
考虑不同波段分光路成像会造成系统体积大,设计了共光路、成像面位置一致的可见光加中波红外宽光谱光学系统。子眼光学参数如表3所示。初始结构选用可见光波段的六片式透镜。
Parameter Visible MWIR Band/μm 0.38-0.76 3-5 Focal length/mm 30 F number 3 Field angle/(°) 20 Table 3. Sub-visual parameters
对初始结构分析,主要影响光学系统的像差,做初步优化。接着对玻璃材料进行更换,使每个透镜均能透过可见光以及中波红外,形成共光路成像,得到低折射率CAF2、高折射率ZNS搭配的子眼结构,采用二元光学搭配消色差透镜校正系统色差并为系统消热差做准备,具体内容见消色差部分。最终子眼镜头结构如图4所示。

Figure 4. Sub-eye structure light path diagram
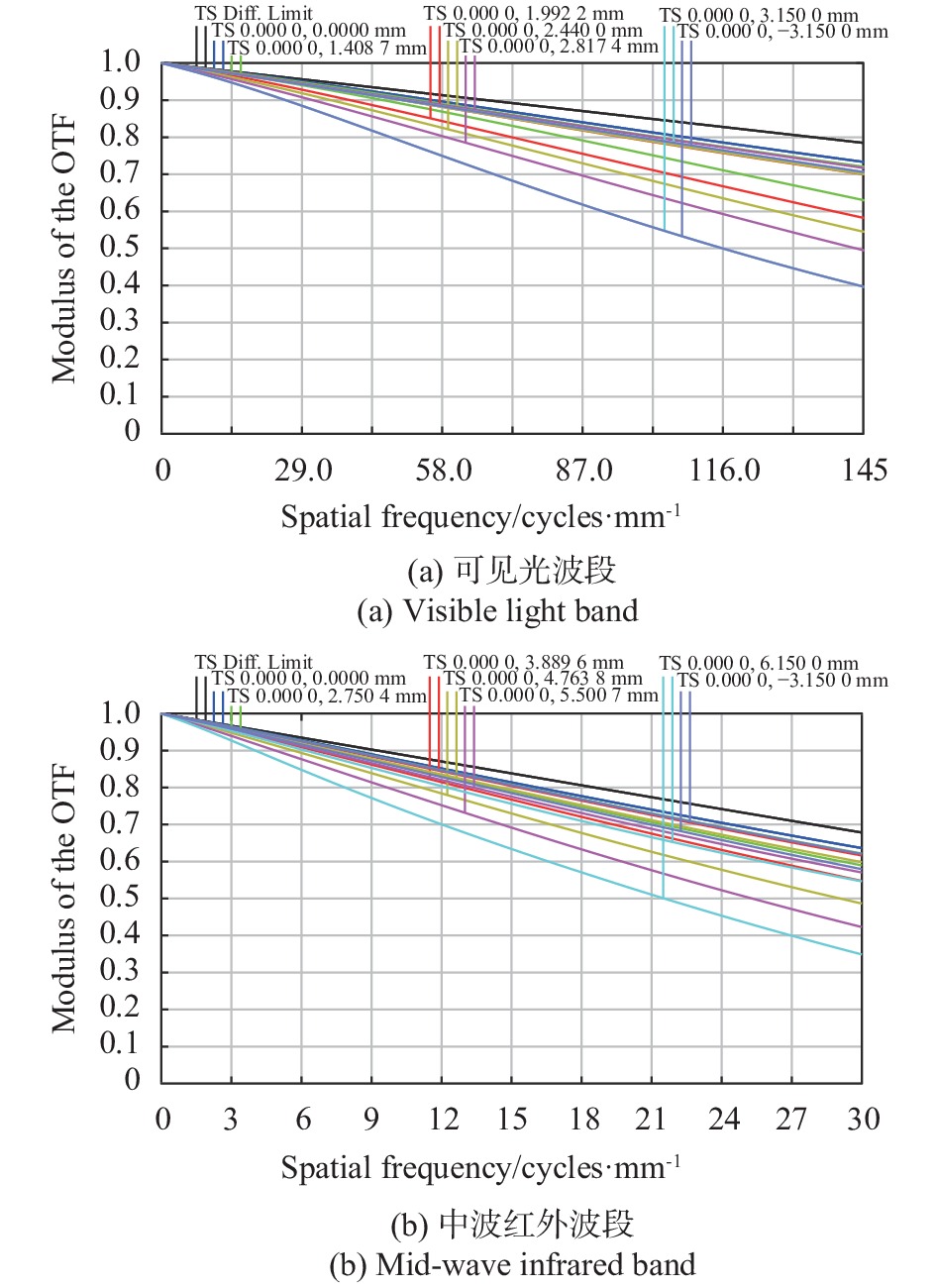
图5显示了不同条件下光学系统的调制传递函数(MTF)曲线。可以看出,系统在可见光波段的MTF值于奈奎斯特频率75 lp/mm大于0.3,在中波红外波段的MTF值于奈奎斯特频率33 lp/mm大于0.4,红外波段的成像质量可以达到衍射极限。

Figure 5. MTF of subocular system
图6显示了子眼透镜系统的RMS视场。可见光波段下最大RMS波前为0.2135个波长,中红外波段的最大RMS波前为0.0544个波长,均满足波像差小于0.25个波长。子眼系统的场曲、畸变如图7所示,像质良好。

Figure 6. RMS field of view of the sub-eye system
按照设计的结构将子眼排布在曲面基底上,在光学设计软件的非序列模式下进行模拟,如图8所示。
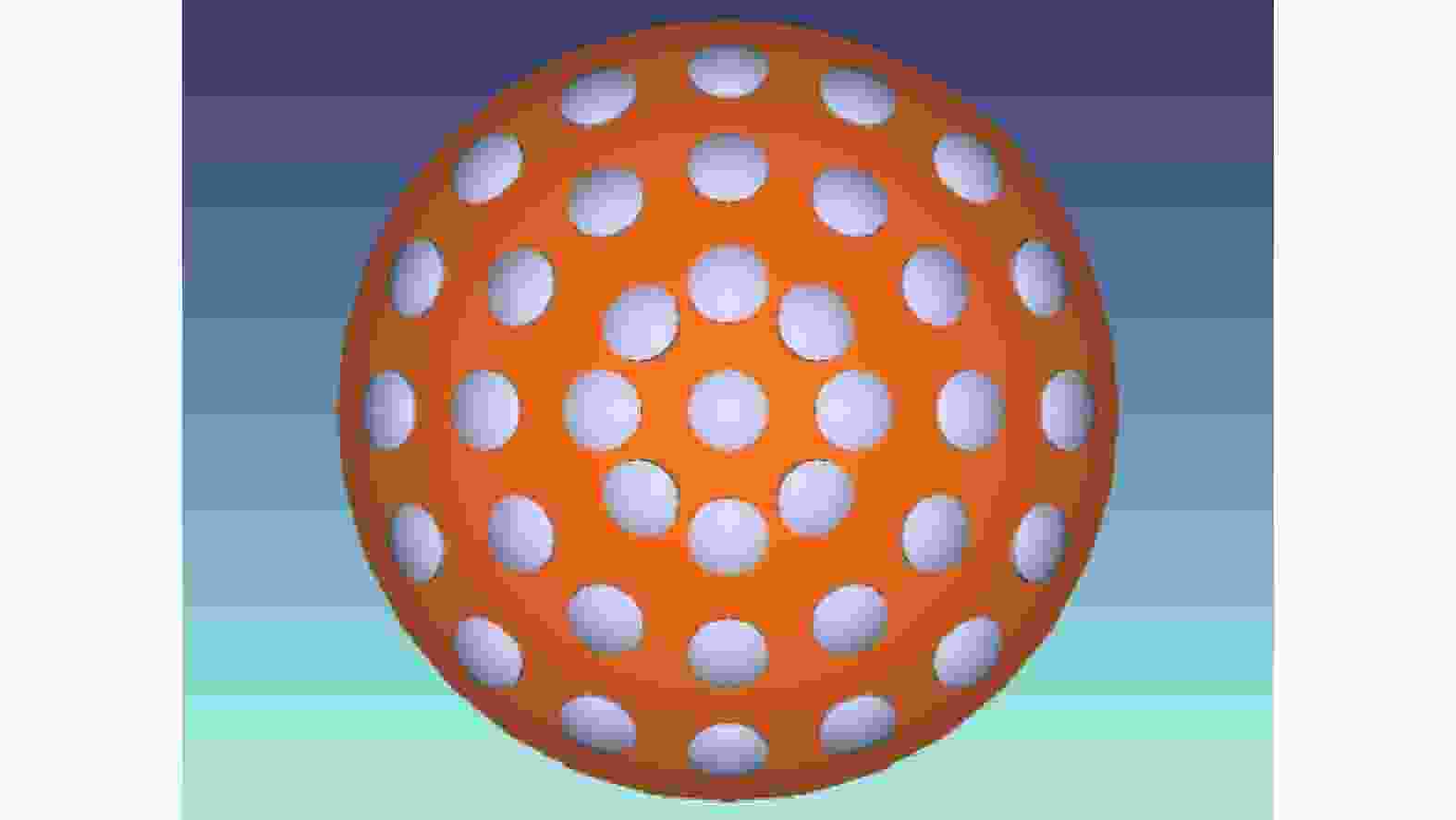
Figure 8. Sub-eye lens array
该阵列排布在R=65 mm的基底上,X方向有四个子眼,Yi(i=0,1,2,3)方向有1、8、12、16个子眼,子眼总数目为37个,彼此之间无机械碰撞,分析的结果与数学模型相符合,验证了数学模型的正确性。
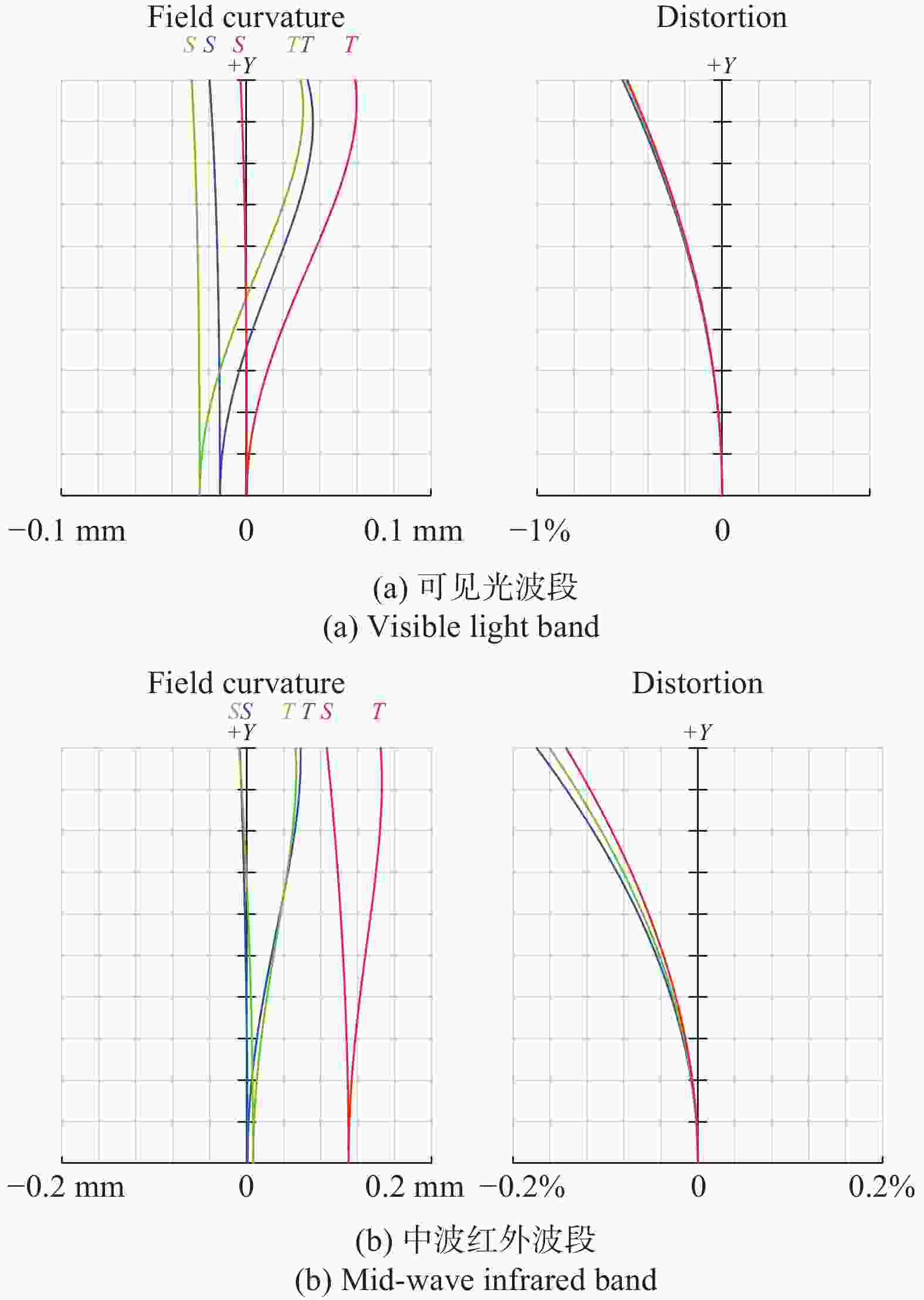
Figure 7. Field curve and distortion of sub-eye system
-
接收系统物面具有65 mm的表面曲率半径和70 mm的有效口径,以保证将所有子眼所成的焦曲面像能完全收纳于接收系统的成像视场范围内,确定接收系统的总视场角不小于96°。每个子眼都具有相同的焦距,它们形成的焦曲面像与基底同心,复眼的焦曲面像是接收系统的物,接收系统将曲面再次成像转换成平面,方便被平面探测器接收,有利于成像质量的提升。接收系统的具体参数如表4所示。
Parameter Visible MWIR Band/μm 0.38-0.76 3-5 Field angle/(°) 96 F/# 2 Pixel 1456×1088 640×512 Pixel size/μm 3.45×3.45 15×15 Table 4. Optical parameters of the receiving system
通过查阅光学设计镜头手册,选取了一款性能参数接近的光学系统作为初始结构,对初始结构进行缩放,来满足设计要求。由于设计系统是双波段、共口径,所选取初始结构需进行改进设计。
接收系统可见光部分与红外部分最终设计焦距分别为2.4 mm和4.34 mm,相对孔径为1:2,FOV不小于96°,共口径部分三枚镜片,材料为ZnS和CaF2搭配,分光棱镜材料为CLEARTRAN,可见光补偿部分为四枚镜片,材料均为成都光明的玻璃,分别为H-ZK6、H-ZL7FA、H-ZLAF55C、H-ZLAF50E,中波红外部分为三枚镜片,材料为Si和Ge。
可见光材料一般透过率都较高,可达99%以上,红外材料相对来说稍差。对于共口径部分材料ZnS做基底时,使用YBF3和ZnS相互交替成多层膜系[10],峰值透过率达99.2%,平均透过率达98%以上,Si和Ge使用ZnS做膜系,在中波的透过率可达98%,分光棱镜材料也为ZnS,使用ZnS、Ag交替的多层膜系实现可见高透中波红外高反。经计算,红外系统透过率达64%,可见光系统透过率达78%,满足光学仪器的使用要求。
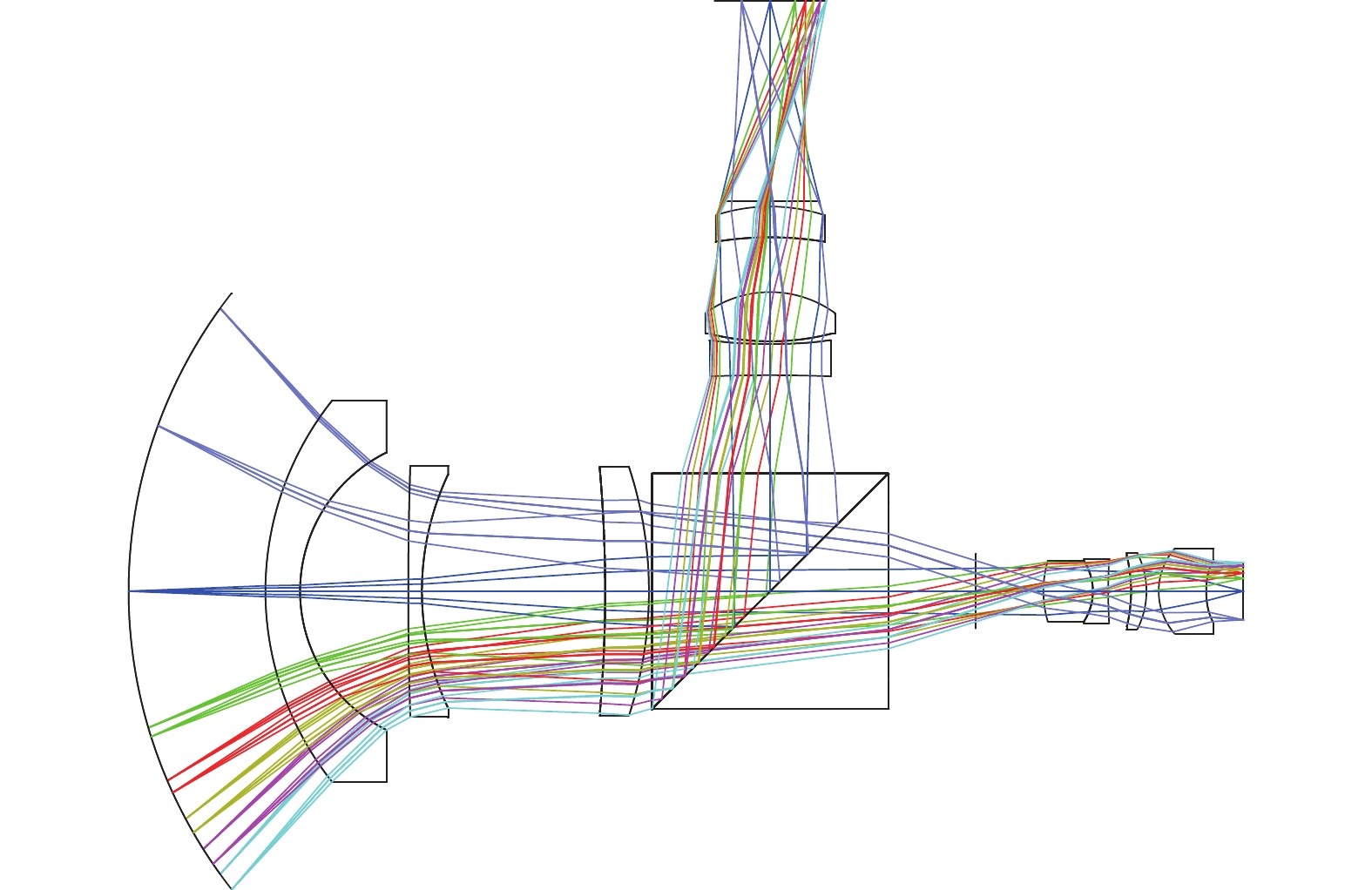
接收系统二维显示图如图9所示。

Figure 9. Structural light path diagram of receiving system
对成像光学系统来说,MTF对其成像质量能客观并全面地反映出来,如图10所示,可见光在145 lp/mm各视场MTF值大于0.35,中波红外在30 lp/mm各视场MTF值大于0.45,且曲面呈平滑趋势,满足系统的成像质量。
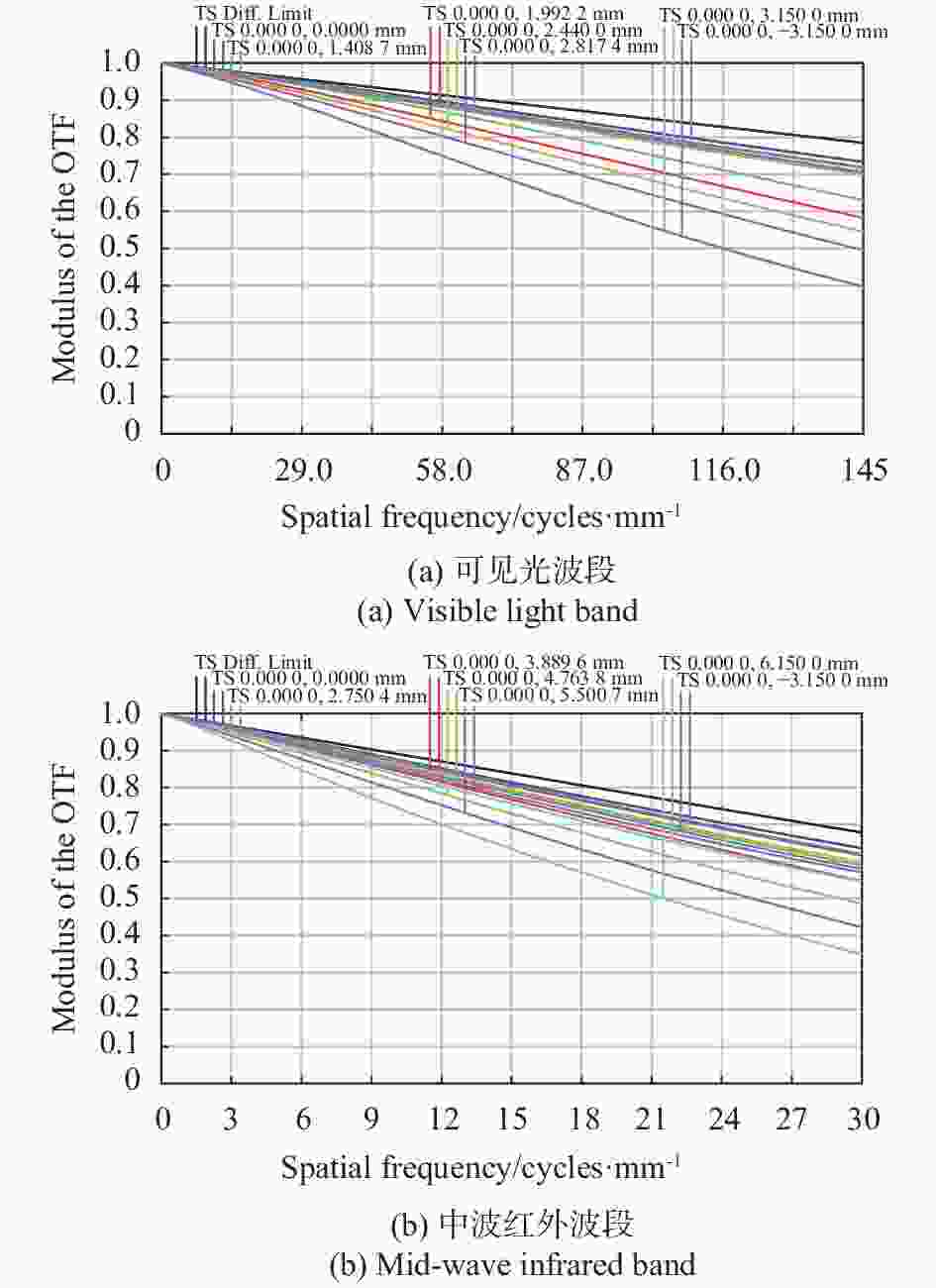
Figure 10. MTF of the receiving system
中继系统RMS视场如图11所示,可见光波段下的最大RMS波前为0.1182个波长,中红外波段最大RMS波前为0.1114个波长,均满足波像差小于0.25个波长,接收系统的场曲、畸变如图12所示,像质良好。

Figure 11. RMS field of view of the receiving system

Figure 12. Field curve and distortion of receiving system
-
由于光学系统使用环境的复杂性,其会伴随着高低温出现离焦现象,为使系统能够在高低温环境正常工作,需要进行消热差处理,子眼结构众多考虑到系统的轻量化,为此通过材料间的相互补偿来抑制温度变化引起的离焦,并引入特殊面型的方法,对子眼提出了采用光学被动式的方法对系统进行消热差,对中继系统以调焦的方式进行消热差处理。
无热化光学系统色设计要满足光焦度分配、消色差和消热差三个方程:
式中:hi、ϕi、θi、χi分别为各透镜组近轴光线高度、光焦度、色差系数和热差系数;h1为第一个透镜近轴光线高度;ϕ为系统总光焦度;ai为各部分镜筒材料的线膨胀系数;Li为各部分镜筒长度。
二元衍射面消热差原理:
采用薄透镜模型时,折射原件的光热膨胀系数xf,y可表示为:
式中:ag、n分别为材料光热膨胀系数和折射率;n0为介质折射率;dn/dT为透镜材料的折射率温度系数。
折射元件光热膨胀系数与透镜形状无关,仅取决于材料的性质,对于二元衍射面,其光热膨胀系数xf,d为:
一般来说,红外材料的dn/dT都很大,其光热膨胀系数xf,y为负,而二元衍射面光热膨胀系数xf,d始终为正。因此,合理搭配可以进行系统消热差。
根据公式(14)可以计算出理想透镜的光焦度,基于三组元进行实际透镜光焦度分配并做像差校正和消热差,整个结构以正负交替的搭配方式,共五枚镜片。ZnS折射率温度系数为40×10−6 K−1,在第二个透镜后表面引入一个二元衍射面,既能提升消色差效果,又能消除大温差带来的离焦影响,结构形式见前述子眼透镜设计。镜筒材料选择常见的铝合金,其热膨胀系数为23.6×10−16 K−1,与透镜配合实现光学被动无热化。
依据调制传递函对消热差后的光学系统成像质量进行衡量。图13~图16分别为进行了消热差处理的子眼透镜及中继系统在低温−40 ℃、高温60 ℃下的MTF图。

Figure 13. MTF in visible light band of sub-eye at −40 ℃ and +60 ℃
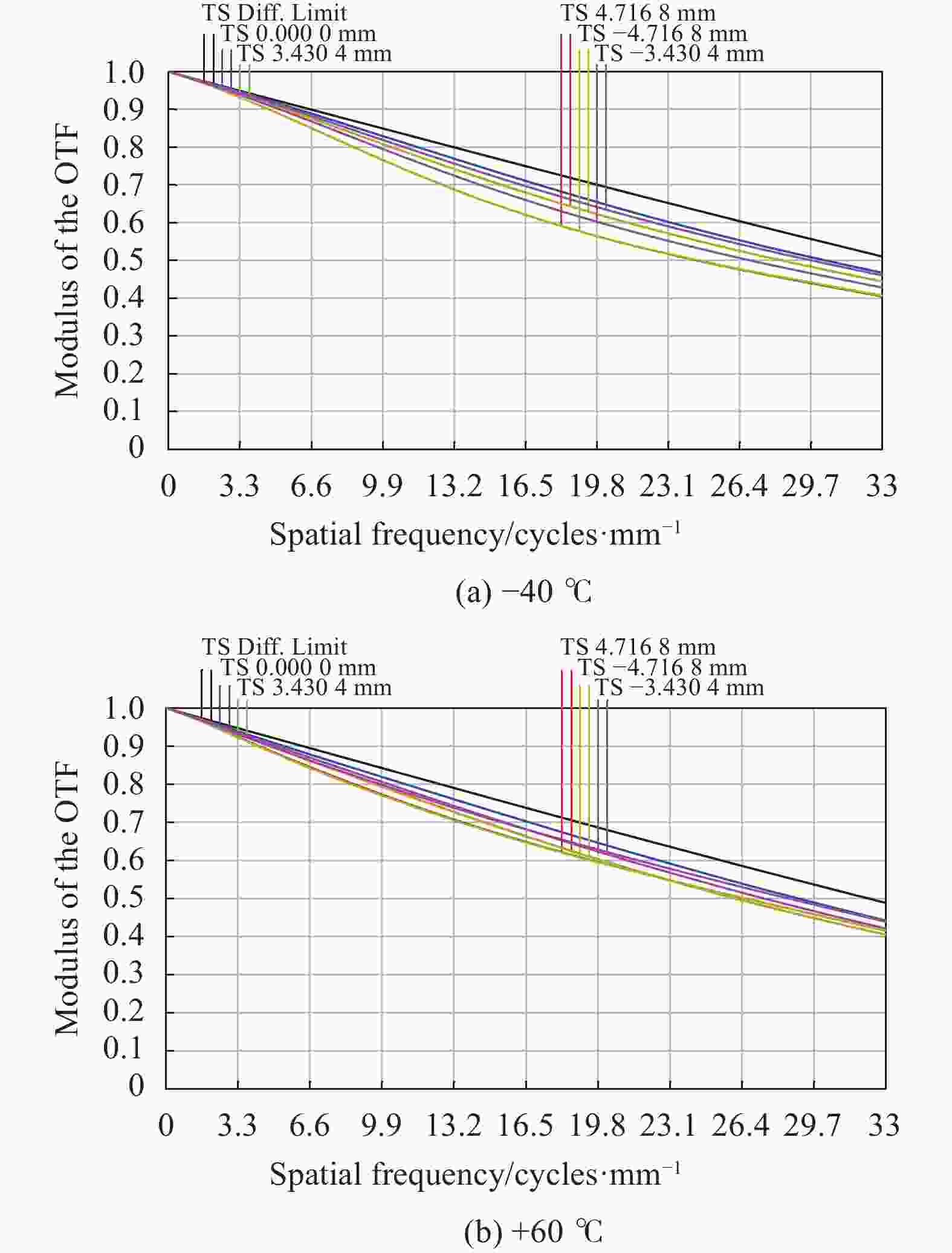
Figure 14. MTF in mid-wave infrared band of sub-eye at −40 ℃ and +60 ℃

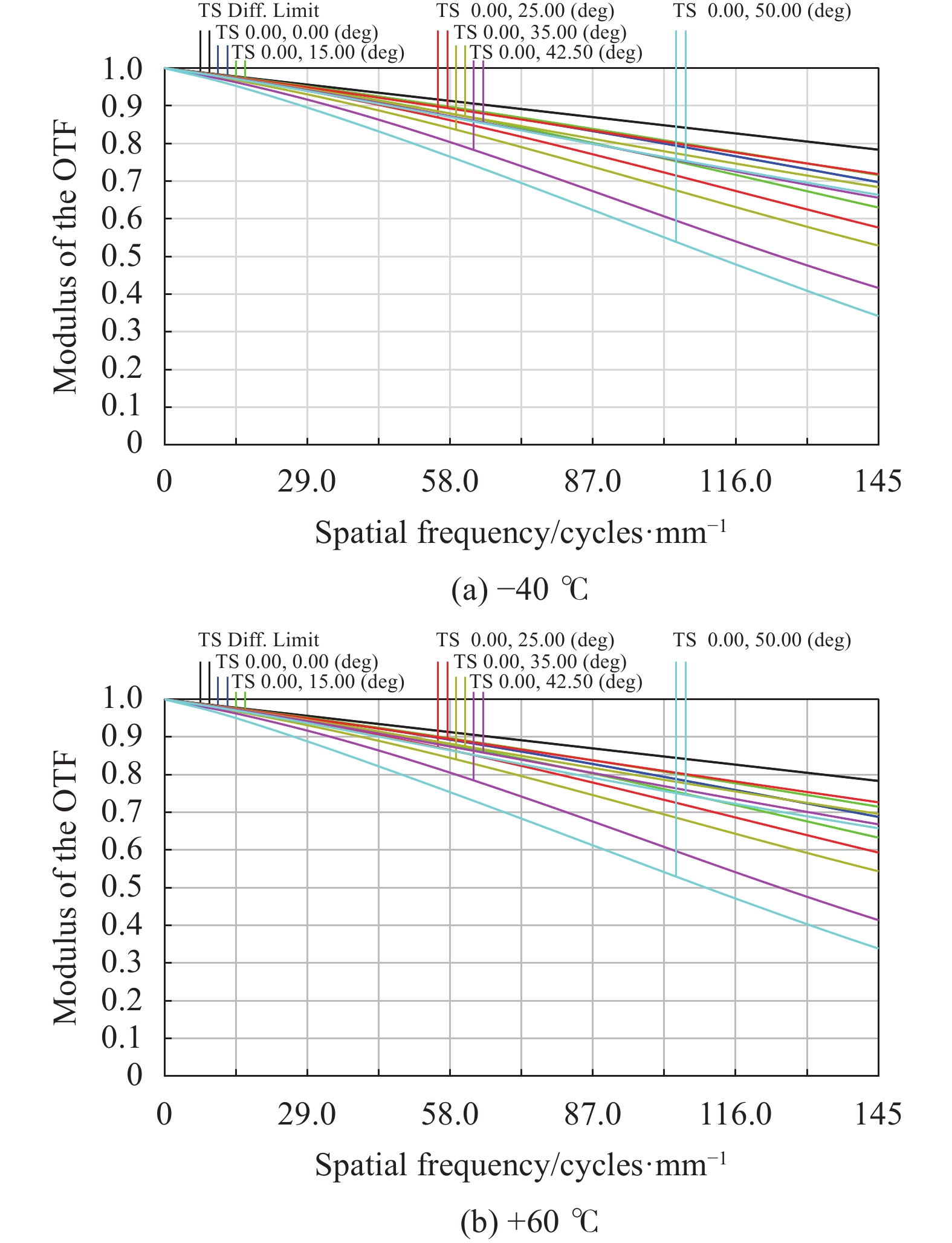
Figure 15. MTF in visible light band of receiving system at −40 ℃ and +60 ℃

Figure 16. MTF in mid-wave infrared band of receiving system at −40 ℃ and +60 ℃
由焦深公式计算得子眼透镜可见光波段的焦深值为21.168 μm,中波红外波段的焦深值为144 μm,由表5可以看出,两个波段高低温时的离焦量均在焦深范围内。子眼透镜在实现双波段共光路且共像面的情况下,无热化后可见光波段高低温下的MTF值在70 lp/mm大于0.35,中波红外波段高低温下的MTF值在33 lp/mm大于0.4,基本靠近衍射极限,获有高成像质量。
Temperature/℃ VIS/mm MWIR/mm −40 29.9798 30.1276 20 29.9987 30.0417 60 30.0177 30.1470 Table 5. Focal lengths of sub-eye systems in VIS and MWIR bands at different temperatures
通过计算,接收系统可见光波段的焦深值为9.408 μm,中波红外波段的焦深值为64 μm,由表6可以看出两个波段高低温时的离焦量均在焦深范围内。接收系统采用共口径分光路的形式对复眼曲面像实现像面变换。消热差后可见光波段高低温下的MTF值在145 lp/mm大于0.45,中波红外波段高低温下的MTF值在33 lp/mm大于0.35,均满足成像质量要求。
Temperature/℃ Visible/mm MWIR/mm −40 2.6001 4.5925 20 2.6054 4.672 +60 2.6101 4.6130 Table 6. Focal lengths of receiving systems in VIS and MWIR bands at different temperatures
-
在实际生产中,由于设备精度、材料产生、加工装调以及人员主观因素等原因,生产的光学系统无法达到与设计的一模一样。所以在设计阶段将对系统成像质量造成影响且能控制的因素考虑到。引入公差,查看系统性能是否达到要求,对公差分配如表7所示。文中选择“几何MTF平均”模式作为公差分析的城乡标准。采用灵敏度和蒙特卡洛分析法分析500组镜头数据,分结果使用离散图的形式给出,如图17所示。
Parameters Valum Radius/Fringes 4 Thickness/mm ±0.01 Surface decenter/mm ±0.02 Surface tilt/(°) ±0.01 Element decenter/mm ±0.02 Element tilt/(°) ±0.01 Index 0.001 Abbe 0.5% Table 7. Tolerance allocation

Figure 17. Tolerance analysis results of 500 groups
从图17数据分析得出,可见光波段有90%的概率MTF值大于0.35,中波红外波段有90%的概率MTF值大于0.25,满足系统加工装调的要求。
工程上成像性能的判定依据是Johnson准则,Johnson准则以分辨光学系统的最小张角内的黑白条纹数来表征光学系统的分辨能力。仿生复眼系统的子眼焦距决定着系统的探测能力,对大小为2.3 m的目标进行探测,在50%的概率下,可见光与中波红外波段探测到目标所需的线对数分别为一个线对和两个线对[11]。计算式如下:
式中:R为探测距离;H为探测目标大小;f'为子眼焦距;c为线对个数;μ为可见、红外探测器的像元大小。由公式(17)计算得,可见光波段的探测距离达5 km,中波红外波段探测距离达2.3 km。
生物复眼具有孔径小的特点,其成像分辨率受到明显的衍射限制,子眼孔径决定子眼透镜的截止频率,文中通过比例放大法对子眼进行缩放以克服衍射受限[12]。由衍射理论可得,复眼能分辨的两发光点的角间距为:
式中:ѱ为极限分辨角;λ为可见光、中波红外波段的中心波长;D为入瞳直径。由公式(18)得系统可见光、中波红外波段的衍射极限对应的最小分辨角分别为0.25"和1.8"。相比之下,该系统以放大子眼孔径提升衍射极限,且增大了仿生复眼系统的探测距离。
-
红外系统采用制冷探测器,其像面温度低至77 K,因此在机械结构同探测器间产生了很大的温差,结构产生的热辐射也会达到探测器,而镜片上的增透膜也不会完全消除反射光,在系统的每个表面之间残留部分冷反射,若这些因素在光学设计不考虑,将会看到像面上由于冷反射效应造成的明显对比度差异。文中使用相关程序来计算制冷探测系统中冷反射导致的温度差异(NITD)特性,并将其作为实际光线追迹冷反射分析方法的评价指标。程序计算基于如下冷反射公式:
式中:N(λ,TH)为机械壁光谱辐射;N(λ,TD)为探测器光谱辐射;Rd(λ)为探测器归一化光谱响应;Rj(λ)为表面光谱反射率;A(λ)为大气透过率;σij为从表面j回射的辐射落在冷却探测器上的立体角比探测器像元i到探测器冷屏蔽固体角度;to(λ)为从第一透镜表面到探测器的平均光传输;tj(λ)为从检测器表面开始直到透镜表面的平均光透射率。
规定大气透过率为1,各表面镀膜透过率在整个工作波长下为不变量,探测器温度、机械结构温度和环境温度分别为77 K、300 K和300 K,对整个系统进行冷反射,所得各个面的NITD和整个系统的NITD分布如图18所示。

Figure 18. NITD of each surface and total NITD of the medium wave infrared system
由图18可知,单个表面的NITD为1 K,总体的NITD为2.790 K。
-
文中建立了复眼和子眼系统之间的数学模型,设计了四环镜片组仿生曲面复眼成像系统,并使用三维建模的方式对数学模型建立得以正确检验。系统可以同时接收可见光波段和中波红外波段的目标信息,从而扩展复眼系统的光谱接收范围。使用变换像面的方式解决了平面探测器接收曲面像的问题。在设计的复眼系统中,可见光奈奎斯特频率75 lp/mm传递函数值大于0.3,中波红外传递函数值在奈奎斯特频率33 lp/mm时达到0.4。在设计的接收系统中,奈奎斯特频率为145 lp/mm时,可见光波段传递函数的值大于0.5,中波红外波段传递函数的值在奈奎斯特频率33 lp/mm处达到0.35。讨论了复眼系统参数的计算、光学系统的设计、温度适应性、公差分析及冷反射分析。结果表明,系统满足成像质量要求,公差分配合理,满足对温度的适应性和杂光的要求。该复眼结构具有工作距离远、宽光谱成像的特点,在工业检测、航空航天、军事方面具有广阔的应用前景。
Design of miniaturized dual-band observation system with composite aperture
doi: 10.3788/IRLA20210549
- Received Date: 2021-08-06
- Rev Recd Date: 2021-11-01
- Publish Date: 2022-05-06
Fund Project:
Army Equipment "13th Five-Year" Pre-research Project(301XXX102);Foundation of Low light Night Vision Technology Key Laboratory(61424120503xx)
-
Key words:
- bionic compound eye system /
- lens array /
- field of view stitching /
- dual band
Abstract: Aiming at the shortcomings of single-band biological compound eye, such as small aperture, short line-of-sight and narrow receiving spectrum, a bionic compound eye optical system with large aperture for receiving visible light and medium-wave infrared was designed. In view of the large volume of the integrated optical path, the common optical path structure was selected for the sub-eye system. Based on the conjugate relation between object and image of entrance window and exit window, the geometric model of sub-eye system mosaic was established. By designing relay image transfer system, the curved image formed by sub-eye array was converted into planar image, which solved the problem of planar detector receiving curved image. The whole compound eye consists of 37 sub-eyes, with a focal length of 30 mm, a field of view of 20°, an entrance pupil of 10 mm, an included angle between the axes of adjacent sub-eyes of 16°, and a combined field of view of 116°. Compared with microlens array compound eye system, this curved bionic compound eye system has longer detection distance and more complete target information. The imaging quality of sub-eye system and receiving system is good, and there is no thermal difference in the temperature range of −40-+60 ℃.















 DownLoad:
DownLoad: