





-
摩擦力矩是评价轴系运行平稳度和运行精度的重要参数,也是影响轴系旋转灵活性及寿命的关键因素[1]。随着各类产品,尤其是军工产品对精密轴系组件的技术参数要求越来越高,各国学者对轴系摩擦力矩的测量技术开展了探讨。目前常采用传递法测量轴系动摩擦力矩。英国Hampson M R[2]在2013年研制了一款基于传递测量法的带密闭容腔的轴承摩擦力矩测试仪,可用于测试不同温度下轴承的摩擦力矩。韩国Kyuho Sim[3]等人在2018年研制了一种能够测试气膜轴承在冷气流作用下的轴承摩擦力矩实验系统。目前,国内外研究提升测量精度的方法局限于对检测设备结构的改进和测试方法选择,未考虑控制方法对检测精度的影响。因此,检测设备仍存在系统抗干扰性能较差、误差较大和重复测量精度低等问题。
智能控制算法的推广应用为提高摩擦力矩检测设备检测精度提供了新的方法。Jizhuang Fan[4]等人将BP神经网络与PID控制相结合,提出基于反馈信号在线调整PID控制器参数的BP神经网络控制方法,该方法较传统PID控制方法在位置跟踪中具有更好的容量。由于离线学习方法无法获取全部样本,限制了算法在预测方面的应用,胡近朱[5]等人针对交流伺服系统中非线性干扰的问题,提出了一种在线自抗扰控制器,显著提高了系统的抗干扰能力。
某型激光雷达伺服转台在指定空域所在的方位和俯仰两个方向进行图像扫描时[6],若方位、俯仰轴系摩擦力矩不满足设备要求,会因不稳定运动造成图像行的抖动、缺失或畸变,影响成像质量[7-8]。因此对其轴系摩擦力矩有较为准确的认知尤为重要。
为提高激光雷达轴系摩擦力矩检测设备的重复测量精度,降低测量时数据的波动,提出了一种在线自更新控制算法。针对测试主轴的伺服控制系统,以主轴转速的相关参数建立数据云,并与GA-BP算法融合构建自更新控制算法。将文中所提出的自更新控制算法与原系统所使用的Z-N-PID算法进行对比,通过仿真实验分析系统的阶跃响应和抗干扰性能,由结果可知,文中所提出的自更新控制算法具有更小的超调量和较强的抑制力。使用不含温箱部分的基于传递测量法的激光雷达轴系摩擦力矩检测设备,分析两种算法在重复测量精度和极限误差方面的性能,结果表明,该自更新控制算法相比于Z-N-PID算法,稳定后数据标准差降低了5.00%~40.63%、重复测量误差降低了24.20%~71.66%。
-
笔者课题组通过传递法对激光雷达的轴系摩擦力矩进行检测,设备主要由测试系统和控制系统组成。测试系统主要由温箱、装夹装置、对接卡爪、扭矩传感器、伺服电机等组成。控制系统主要包括运动控制器、工控机、伺服驱动器、继电器等。
摩擦力矩检测设备工作时,将待测试激光雷达轴系装卡在温箱上下两端的工装上,由温箱以5 ℃/min的速度将被测激光雷达轴系控制在温度范围为−55~75 ℃中的某一温度下,而后使用运动控制器分别控制两台伺服电机实现升降和测试。通过测试电机带动被测激光雷达轴旋转,致使两端轴承在轴系旋转时,由轴承内、外圈和滚动体的相对运动产生动摩擦力矩。使用力矩传感器进行数据采集,通过工控机进行数据的存储、处理,生成可有效反映动摩擦力矩变化的曲线。
-
摩擦力矩检测设备常用PID控制,文中系统采用Z-N-PID算法实现对激光雷达轴系摩擦力矩的测量。Z-N-PID算法其控制参数由人为事先计算确定,因而对实际工况下输入信号特性的随机变化难于自适应[9-10],导致设备重复测量精度>0.0025 N·m,极限误差>0.05 N·m,不满足设备使用需求。而GA-BP神经网络可以通过学习和存贮大量的输入-输出模式映射关系,获得更加精准的网络预测,但因激光雷达轴系具有不同尺寸的俯仰轴系和方位轴系,且在不同转速下工作,所以,在激光雷达轴系摩擦力矩测试设备初期设计使用中,不能获取不同激光雷达轴系所对应的全部PID控制参数,无法对BP神经网络进行完整的训练,导致设备在测试轴系时数据波动较大,且重复测量精度较低。故提出了一种在线学习自更新的控制算法,以适应不同工况下的摩擦力矩测试。
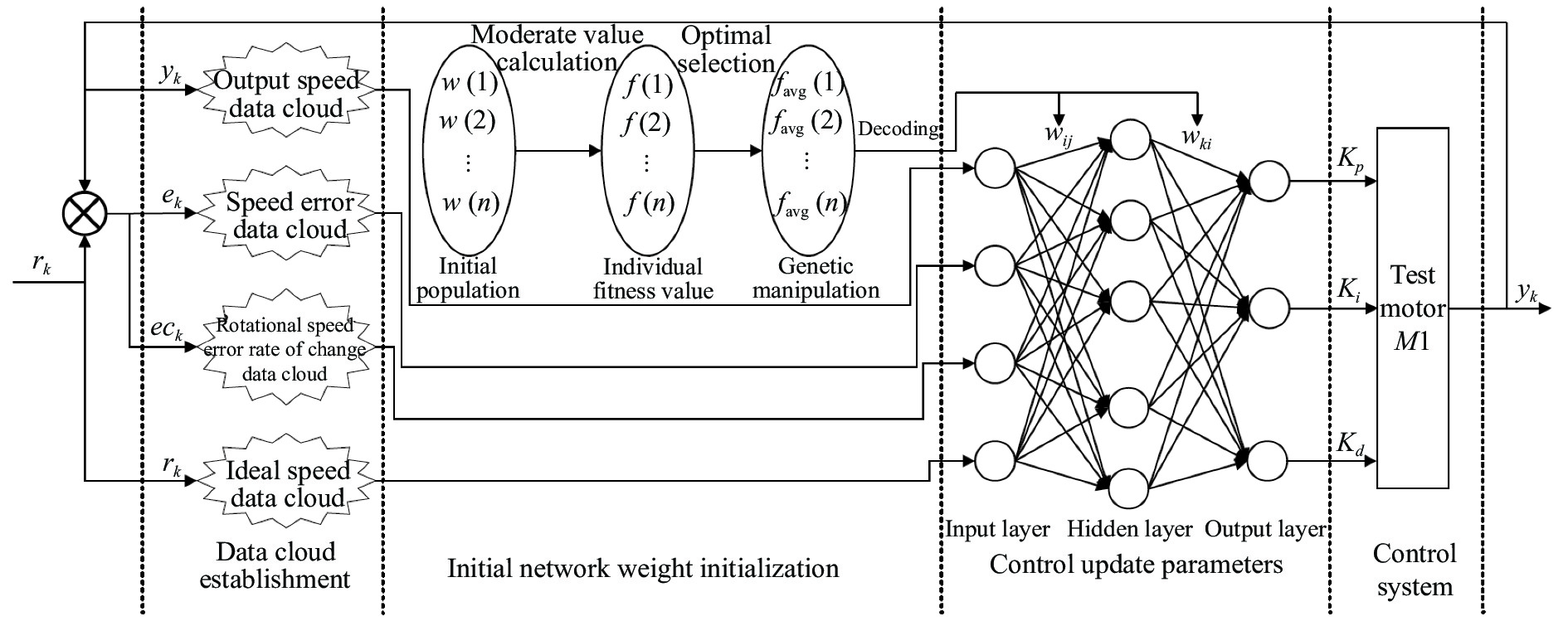
所提出的在线学习自更新控制算法,首先通过GA算法初始化BP神经网络权值,然后分别建立激光雷达轴系摩擦力矩设备测试主轴实际转速、理想转速、转速误差及转速误差变化率的数据云,最后将数据云数据传递至GA-BP算法中,以获取最佳控制参数。自更新控制算法流程图如图1所示。

Figure 1. Flow chart of self-updating control algorithm
-
在所提出的自更新控制算法的数据云建立过程中,为避免数据冗余,影响运算速度,使用距离信息与局部密度作为删除数据的标准。
(1) 密度信息
在测试电机实际转速、转速误差、转速误差变化率和理想转速的数据云形成时,使用高斯核函数[11]计算其密度,定义第
$ i $ 个数据的局部密度为:式中:
$ {\sigma ^2} $ 为截断距离;$ \left\| {\left. {x_k^i - x_k^j} \right\|} \right. $ 为$ x_k^i $ 到$x_k^j$ 之间的欧式距离。设置采样频率为100 Hz,并通过
$ {x_i} $ 记录样本数据,将之前的局部密度按时间顺序即可得到密度集合$ {\gamma _k} $ :(2) 距离信息
取数据
$ {X_i} $ 与比其本身大的局部数据云之间的平均距离作为距离信息:式中:
$ {S_i} $ 表示密度大于$ {X_i} $ 的前$ N $ 个数据云的集合。通过公式(3)对局部密度中除最大值以外所有局部数据云计算距离,最大值处用1补齐,将之前的距离信息按时间排序即可得到距离信息集合:
(3) 数据剔除
在数据云形成过程中,主要剔除两类数据。其一,测试主轴在启动或变速会产生瞬时突变的转速,产生误差较大的数据。其二,局部密度之间的距离可能随数据的累计而变低。为避免数据冗余、提高系统鲁棒性、加快神经网络运算速度,需对后续新数据样本进行判断,其评判标准[12]为:
若
$ \alpha $ 接近于0或远大于1,则说明该点局部密度与其他密度值较为接近或偏差较大,对于此类数据应当剔除。 -
为保证BP网络输出精度和速度,选取测试主轴实际转速、转速系统误差、转速误差变化率和理想转速形成的数据云作为输入[13]。BP神经网络采用一层隐含层的网络形式,设置学习速率为0.5。由输入、输出参数的数量设定输入层和输出层节点数分别为4和3,隐含层节点数为5。输出层选取利于前向传输的Sigmoid函数作为激活函数,隐藏层选取以0为中心的tanh函数作为激活函数。
使用GA算法优化BP神经网络初始权值时,首先需对个体
$ i $ 进行编码,编码的长度为:式中:
$ b $ 表示输入层节点数;$ c $ 表示隐含层节点数;$ l $ 表示输出层节点数。经计算可知,编码长度为43。
而后确定适应度函数,其公式如下:
式中:
$ f $ 表示适应度函数;$ {r_i} $ 表示第$ i $ 个节点系统理想输出;$ {y_i} $ 表示第$ i $ 个节点系统预测输出;$ \alpha $ 表示系数。此外,初始化设定种群规模N=100,最大迭代次数Tmax=50,变异率F=0.01,交叉率Cr=0.6。
通过GA算法获得适应度最优的个体,解码后即可获取BP神经网络的连接权值和阈值。
-
为分析文中所提出的自更新控制算法的系统响应时间与抗干扰性能,搭建Z-N-PID控制系统模型和自更新控制算法控制系统模型,对激光雷达轴系摩擦力矩检测设备的测试主轴进行仿真实验。
在离散模型的情况下,增量式数字PID控制算法表示为:
根据Ziegler-Nichols(Z-N)[14]方法,整定公式如下:
式中:
$ {K_m} $ 为系统开始震荡时的$ {K_p} $ 值;$ {\omega _m} $ 为震荡频率。计算初始值为:Kp=1.005、Ki=2.328、Kd=0.119。设置实验初始条件为单位阶跃响应,在10 s处添加0.2单位的瞬时干扰,分别获取两种算法系统响应曲线。系统响应曲线对比图如图2所示,系统响应曲线对比数据见表1。
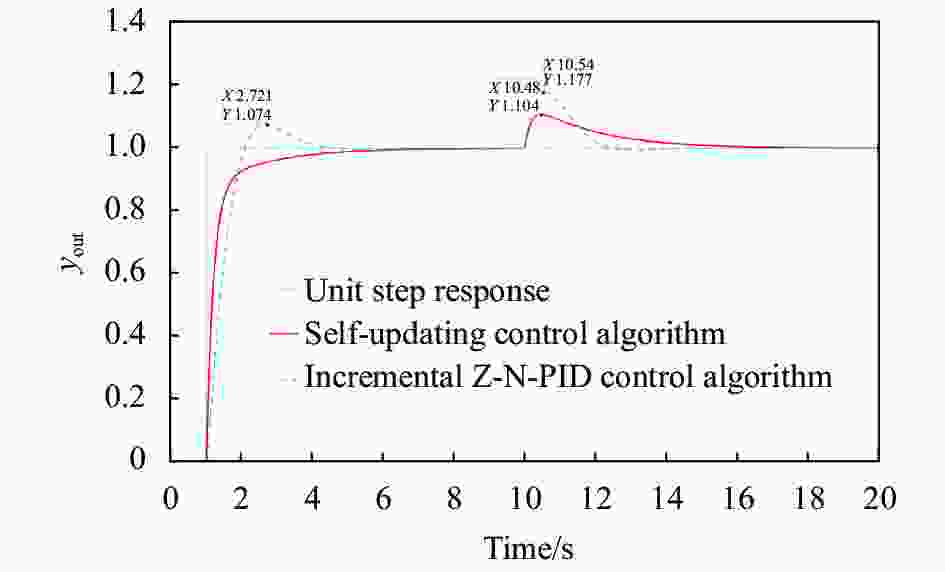
Figure 2. Comparison chart of system response curves
Item Initial stage Interference phase Overshoot Adjust time/s Overshoot Adjust time/s Z-N-PID control algorithm 7.40% 5.968 17.70% 4.588 Self-updating control algorithm 0 7.197 10.40% 8.77 Table 1. Comparison data sheet of system response curve
对表1数据进行分析可知,使用自更新控制算法的控制系统相比于使用Z-N-PID算法的控制系统拥有更低的超调量,但调整时间相对较慢。对于该检测系统而言,较小的超调量意味着系统产生的瞬时冲击较小,即对测量数据的影响也相应地变小,此外也不易导致设备的损坏,延长使用寿命。相对较慢的调整时间并不影响设备最终测量精度,故该自更新控制算法可以更好地满足该设备的需求。
-
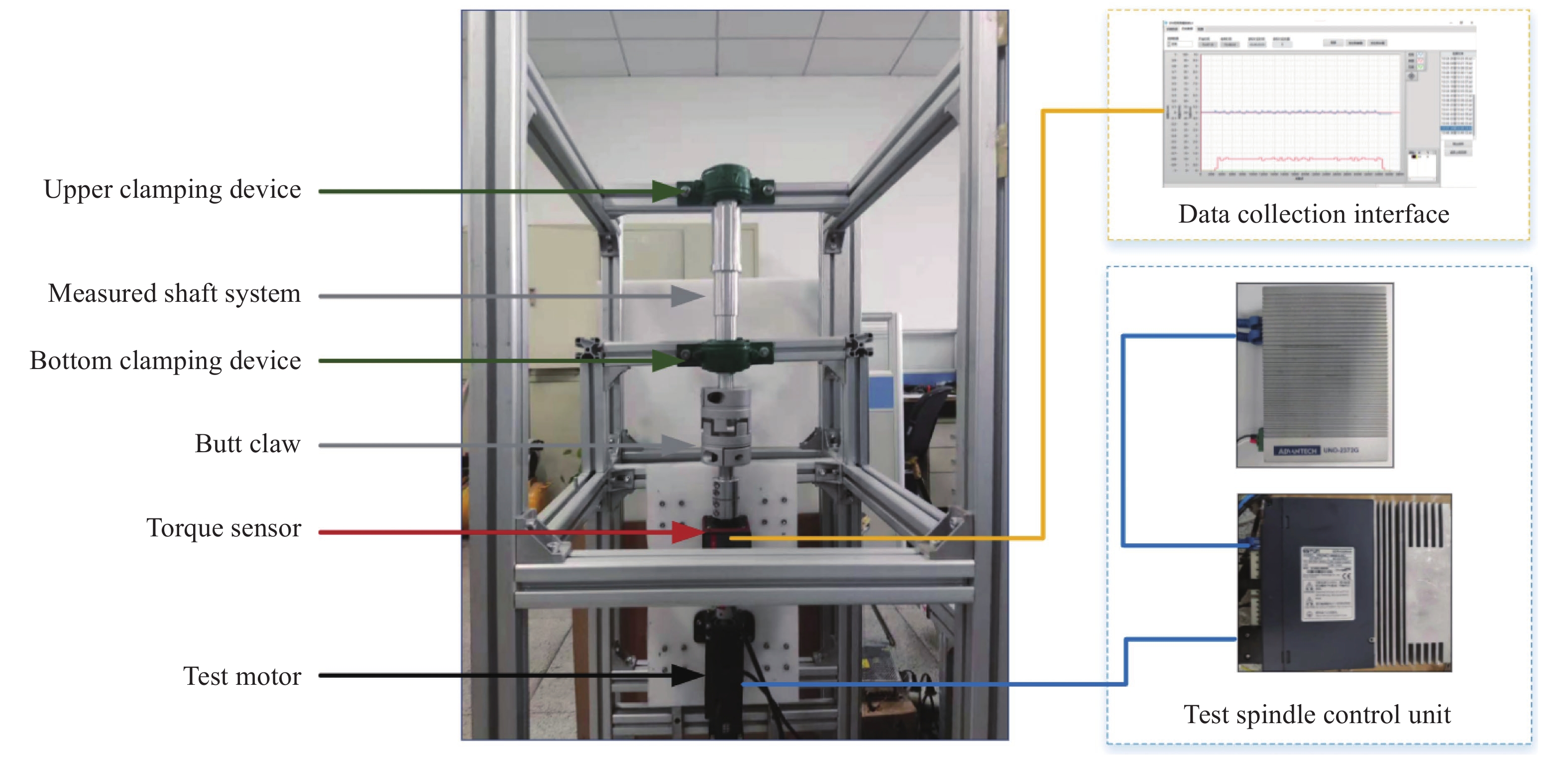
为分析自更新控制算法在测量激光雷达轴系动摩擦力矩时,所采集的数据波动大小和重复测量精度,分别使用自更新控制算法的控制系统与Z-N-PID算法的控制系统,通过不含温箱部分的基于传递测量法的激光雷达轴系摩擦力矩检测设备,进行动摩擦力矩测试。激光雷达轴系摩擦力矩实验平台如图3所示。该设备可测的转速范围为0~50 rpm;能够在整周或规定角度范围内检测轴系摩擦力矩;能够检测轴承部件和轴系在负载下的摩擦力矩。

Figure 3. Lidar shafting friction torque experiment platform
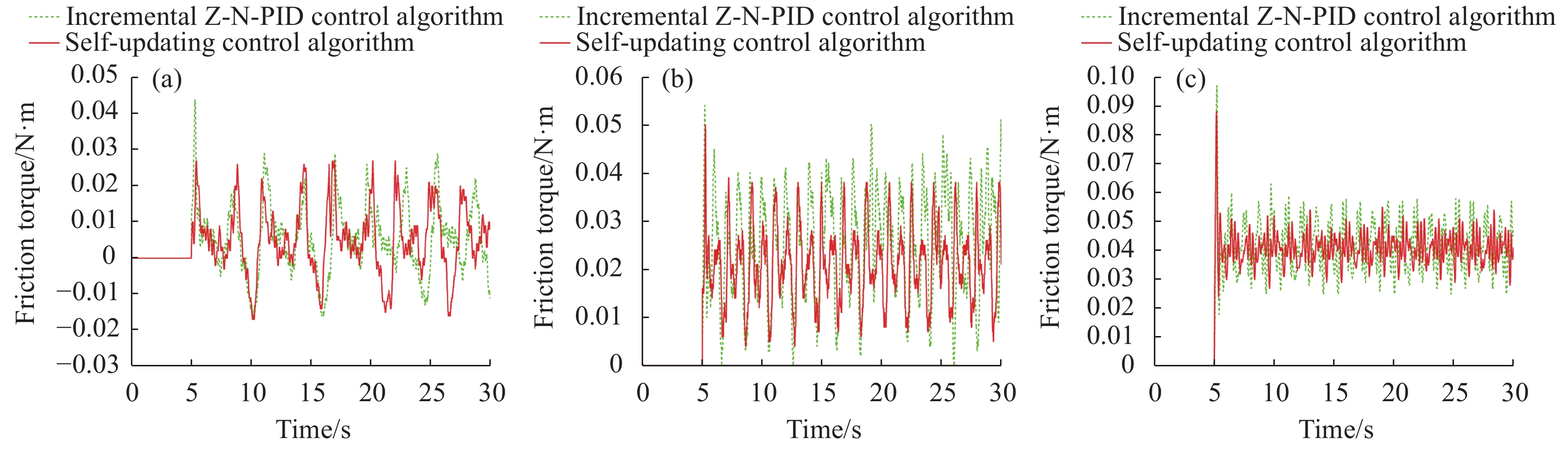
为减少润滑剂、杂质以及其他外界因素的影响[15],在实验前对被测轴系进行清洁。设置实验间隔为10 min,两侧为SKF7207深沟球轴承,测量时间为30 s,采样频率为500 Hz,室温26 ℃。根据参考文献[16],取稳定后(第16~26 s)平均值作为一次测量的结果,进行了100组以上实验,在10、30、50 rpm下各选取12次。对上述两种算法获取的实验数据分别去除最大值与最小值后,首先任取一组实验数据样本分析其结果,所取出的一组动摩擦力矩测量结果如图4所示。

Figure 4. Measurement result. (a) 10 rpm dynamic friction torque measurement results; (b) 30 rpm dynamic friction torque measurement results; (c) 50 rpm dynamic friction torque measurement results
由图4可知,在激光雷达轴系动摩擦力矩检测的过程中,由于润滑剂、杂质等因素的影响,在开始阶段所采集的动摩擦力矩值会产生一定的过冲量,而后逐步趋于稳定。
取图4所展示的数据样本中第16~26 s的数据值,进行数据波动分析,其分析结果如表2所示。
Rotating speed Algorithm Average
value/N·mLimit
error/N·mStandard deviation 10 rpm Z-N-PID control
algorithm0.005796 0.045 0.009981 Self-updating control algorithm 0.006355 0.042 0.009482 30 rpm Self-updating control algorithm 0.025631 0.049 0.011012 Self-updating control algorithm 0.020903 0.032 0.007471 50 rpm Self-updating control algorithm 0.041192 0.033 0.007800 Self-updating control algorithm 0.041027 0.026 0.004631 Table 2. Comparison of data fluctuations at collection points
由表2可知,使用自更新控制算法的控制系统在转速为10 rpm的实验中出现最大极限误差,为0.042 N·m,该组数据标准差为0.009482。用Z-N-PID算法的控制系统在转速为30 rpm的实验中出现最大极限误差,为0.049 N·m,该组数据标准差为0.011012。经计算可知,在10、30、50 rpm的转速下,使用自更新控制算法的控制系统相比于使用Z-N-PID算法的控制系统的标准差分别降低了5.00%、32.16%、40.63%。
以上数据表明:在激光雷达轴系动摩擦力矩测量的稳态过程中,使用自更新控制算法的控制系统相比于使用Z-N-PID算法的控制系统所采集的数据拥有更好的收敛性,数据波动较小。
而后,对动摩擦力矩测量起始阶段产生的过冲量进行分析。分别取两种方法在抽取的10组样本中起始阶段最大值的均值作为平均过冲量,动摩擦力矩测量平均过冲量对比如图5所示。

Figure 5. Comparison of average overshoot of dynamic friction torque
从图5可以看出,系统的过冲量随转速的增加而增加。在10、30、50 rpm的转速下,使用自更新控制算法的控制系统相比于Z-N-PID算法对系统的过冲量均有较强的抑制力。经计算可知,在上述转速下,使用自更新控制算法的控制系统的平均过冲值为0.054667 N·m,使用Z-N-PID算法的控制系统的平均过冲值为0.062667 N·m,自更新控制算法相比Z-N-PID算法对过冲量的抑制力平均提高12.77%。
最后,对所抽取的10组样本摩擦力矩值进行分析,其结果如图6所示。
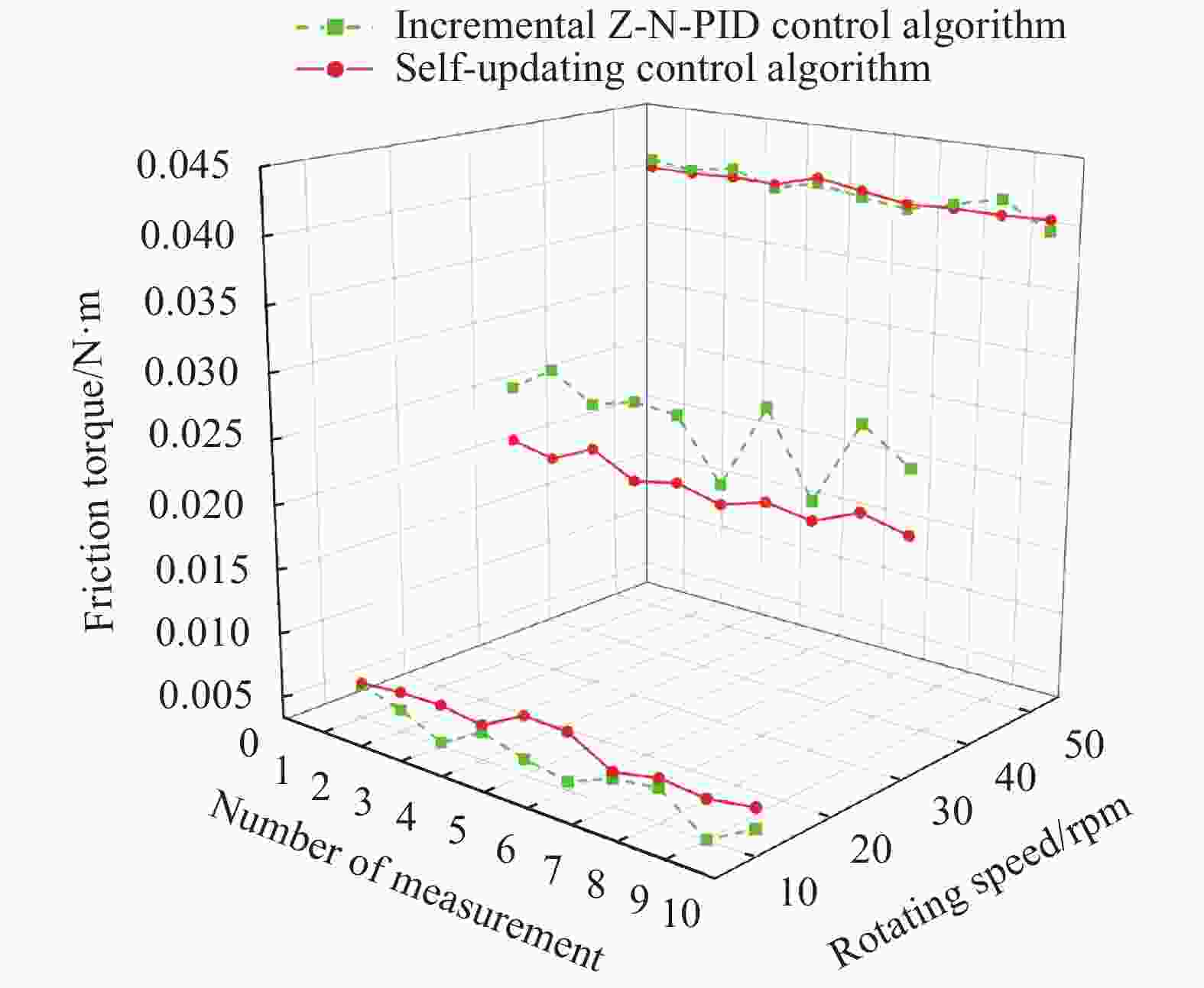
Figure 6. Repeated test results of dynamic friction torque
由图6可以知,使用自更新控制算法的控制系统,测试结果的波动随转速的增加而降低。经计算可知,使用自更新控制算法的控制系统在转速为10 rpm的实验中出现最大极限误差,为0.001948 N·m,在转速为50 rpm的实验中出现最小极限误差,为0.001052 N·m。使用Z-N-PID算法的控制系统在转速为30 rpm的实验中出现最大极限误差,为0.006855 N·m,在转速为50 rpm的实验中出现最小极限误差,为0.001865 N·m。此外,在10、30、50 rpm的转速下,使用自更新控制算法的控制系统相比于使用Z-N-PID算法的控制系统的重复测量误差分别降低了24.20%、71.66%、43.59%。
以上数据表明,在测量激光雷达轴系动摩擦力矩时,使用自更新控制算法的控制系统相比于使用Z-N-PID算法的控制系统可保持较高的重复测量精度,性能较为稳定,鲁棒性较好。
-
针对激光雷达轴系摩擦力矩测量设备重复测量精度低、数据波动较大的问题,设计了一种新型在线学习的自更新控制算法。使用该控制算法与目前设备所使用的Z-N-PID控制算法进行对比,验证其性能,由实验结果分析得出如下结论。
(1)在激光雷达轴系摩擦力矩测量设备的主轴仿真实验中,自更新控制算法相比于Z-N-PID算法控制策略更加保守,系统调节较慢,可以更好地减缓设备运行时的冲击,降低设备运行中的震动。
(2)经仿真实验验证,自更新控制算法与Z-N-PID算法相比,对起始超调量和0.2个单位瞬时阶跃响应的抑制力分别提高了7.40%和7.30%,有较好抗干扰性。
(3)在动摩擦力矩测量过程中,使用自更新控制算法的控制系统与使用Z-N-PID控制算法的系统相比,起始阶段的过冲量平均降低了12.77%。
(4)对稳定后的数据分析可得,同转速下,使用自更新控制算法的控制系统相比使用Z-N-PID控制算法的控制系统所测量的数据标准差降低了5.00%~40.63%。稳态数据波动较小,收敛性较好。
(5)经计算可知,同转速下,使用自更新控制算法的控制系统比使用Z-N-PID控制算法的控制系统重复测量误差降低了24.20%~71.66%。自更新控制算法能够明显提高设备的重复测量精度。
该控制算法运用BP神经网络、遗传算法及密度和距离信息等思想,在零数据的基础上通过在线学习的方式不断更新控制参数,达到自更新的目的。
Self-updating control algorithm and verification of lidar shafting friction torque detection equipment
doi: 10.3788/IRLA20210591
- Received Date: 2021-08-20
- Rev Recd Date: 2021-09-09
- Available Online: 2022-08-31
- Publish Date: 2022-08-31
Fund Project:
Tianjin Science and Technology Project(20YDTPJC00740);Tianjin Natural Science Foundation(18JCYBJC20200)
-
Key words:
- lidar shafting /
- friction torque /
- data cloud /
- self-updating control algorithm
Abstract: We studied the problems of large fluctuations in the dynamic friction torque data of lidar shafting and low precision of repeated measurements. The data cloud constructed based on the test spindle control system was fused with the GA-BP algorithm, and a self-updating control algorithm for lidar shafting friction torque detection equipment was proposed. The data cloud was constructed based on the actual speed, ideal speed, speed error and speed error change rate of the test spindle. The density and distance information were used to add and delete data, and the online control parameters were adjusted by the GA-BP algorithm. Taking the lidar shafting friction torque detection equipment to test the main shaft and the measured shaft system as the research object, the simulation experiment proves that this method improves the system’s anti-interference performance compared with the control system using the Z-N-PID algorithm. The friction torque is detected by lidar shafting friction torque detection equipment. The experimental results show that the proposed self-updating control algorithm reduces the average overshoot by 12.77% compared with the Z-N-PID algorithm, the data standard deviation after stability is reduced by 5.00%-40.63%, and the repeated measurement error is reduced by 24.20%-71.66%.





























 DownLoad:
DownLoad: