Abstract
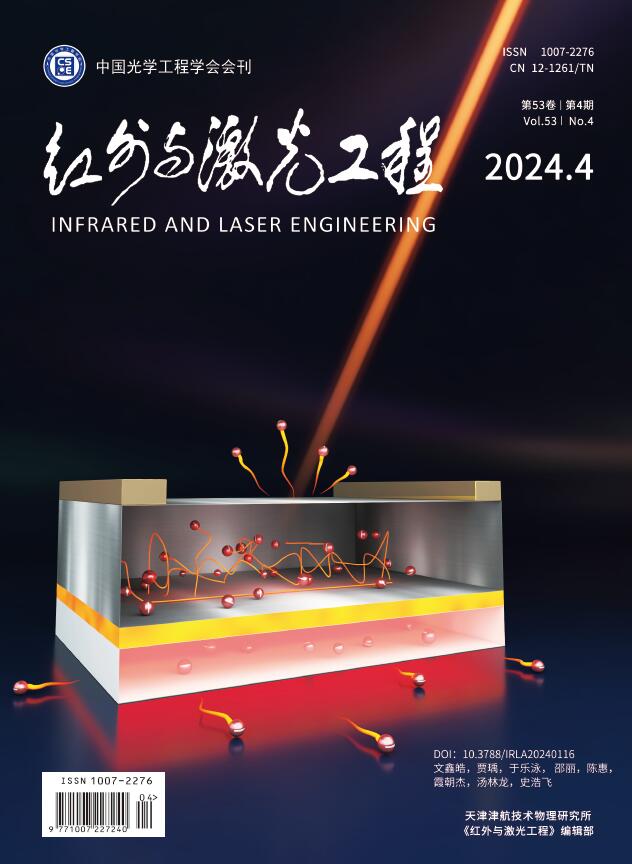
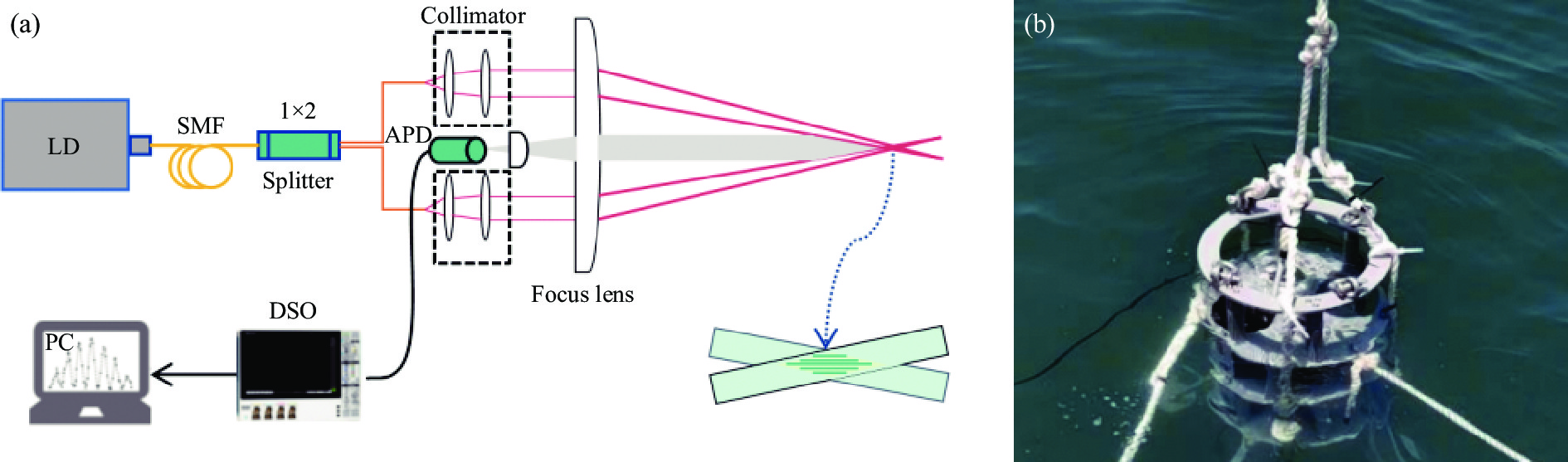
Objective In the field of physical oceanographic research, seawater flow velocity is one of the key parameters, primarily measured using acoustic Doppler velocimeters. In recent years, laser Doppler technology has made significant advancement in seawater flow velocity measurement. Laser Doppler velocimetry, with its simple and integrable structure, is expected to be a complementary technique with acoustic Doppler velocimeters in marine applications. Compared to acoustic velocity measurement techniques, laser Doppler velocimeters offer several advantages: their shorter wavelength (in the micron range) allows for the study of smaller-scale water features, and they can resist noise interference generated by underwater vehicles when used with unmanned underwater vehicles. However, due to seawater absorption and scattering, the detected signal is extremely weak and buried in strong noise, posing challenges for Doppler signal demodulation. Moreover, limited by the sampling frequency, there exists an error between the peak position of the obtained data spectrum and the true frequency. Therefore, effectively removing noise interference and improving measurement accuracy are crucial for laser Doppler velocimeters. In this paper, an adaptive filtering algorithm is employed to denoise the collected signal, followed by fast Fourier transform to enhance the signal-to-noise ratio. Three peak-finding algorithms are compared, and the Gaussian-LM algorithm is selected to process the power spectrum of the signal, bringing the peak position closer to the real peak value and thereby improving the demodulation accuracy of the Doppler signal and significantly reducing the error caused by noise. Methods The principle of laser Doppler velocimetry is illustrated in Fig.1(a). A laser beam is split into two equal beams by an optical fiber splitter after passing through a single-mode optical fiber. These two beams are then collimated into parallel beams by a collimator and directed onto a plano-convex lens at the end, which focuses the parallel beams onto a specific point outside the instrument, generating interference fringes at this focal point. When particles in the water pass through these interference fringes, they scatter light, which is collected by the plano-convex lens and converted into parallel light. This scattered light is then collected by an avalanche photodetector and converted into an electrical signal, which is acquired by an oscilloscope. The acquired signal undergoes algorithm processing to demodulate the flow velocity. Fig. 1(b) is a field photo of the optical system prototype being tested in the Marine environment off Qingdao. The key to signal processing is accurately extracting the Doppler frequency shift from a large amount of noise, and the noise in the Doppler signal is non-stationary. Therefore, the least mean square error algorithm can be utilized to effectively denoise the Doppler signal. Fast Fourier transform shifts the focus of the research from the time domain to the frequency domain, where it is easier to analyze the regularity of the Doppler frequency. Further, the Gaussian-LM algorithm is employed to perform peak finding on the Doppler signal, obtaining accurate frequency information. Results and Discussions Through simulation, the optimal peak finding algorithm was selected. The Monte Carlo algorithm, Gaussian fitting algorithm, and Gaussian-LM algorithm were employed to perform peak finding on Gaussian signals with added noise, and their measurement accuracies were compared, as shown in Fig.2(a). Peak finding calculations were conducted on multiple datasets, and their standard deviations are illustrated in Fig.2(b). The results indicate that the Monte Carlo algorithm exhibited the lowest peak finding accuracy, while the Gaussian-LM algorithm demonstrated the highest accuracy. Moreover, the Gaussian-LM algorithm exhibited smaller standard deviation compared to other algorithms, with a lower fluctuation range, indicating greater stability. Therefore, the Gaussian-LM algorithm was chosen for peak finding in the Doppler signal. A comparative experiment on seawater velocity was conducted at the Zhongyuan Tourist Dock in Qingdao, China, using a home-made optical Doppler velocimetry (LDV) and an acoustic Doppler velocimeter (ADV model: SonTek Argonaut-ADV). Algorithmic research was carried out on the obtained seawater velocity measurement data. Considering the different sampling rates of the two instruments, the data were first averaged over 30 minutes. From Fig.3(a), it can be observed that the data before algorithm processing roughly align with the trend of velocity values measured by ADV, but there are still discrepancies. However, the data after algorithm processing shows a higher degree of fitting with the data measured by ADV. Fig.3(b) illustrates the errors obtained by ADV for the data before and after processing, and presents the calculation of the average error. Through error analysis, it shows that the average error between the pre-processed LDV and ADV velocity measurements was 0.2905 cm/s, while the average error between the post-processed LDV and ADV velocity measurements was 0.2163 cm/s, indicating a reduction in error of 25.5%. Conclusions The signal of light scattering from suspended particles in seawater is extremely weak. Extracting signals submerged in noise and demodulating them to obtain velocity information poses a challenge for accurate measurements with laser Doppler velocimeters. In this paper, demodulation algorithms based on velocity data obtained from experiments in the near-shore of Qingdao were studied. Initially, through simulation and optimization, the Gaussian-LM algorithm was selected as the peak finding algorithm. Subsequently, signal denoising was performed based on the Least Mean Square (LMS) algorithm on the actual velocity data obtained during sea trials, combined with the Gaussian-LM algorithm for peak finding, achieving high-precision demodulation. Comparative experiments between home-made laser Doppler velocimeter and a well-known commercial acoustic Doppler velocimeter indicate that the post-processed velocity measurement error based on this algorithm is 0.21 cm/s, representing a 25.5% error reduction compared to the pre-processing velocity measurement error.












 DownLoad:
DownLoad: