













-
随着空间信息领域的发展和各种信息需求量的大幅增加,激光通信技术有着通信容量大、保密性强、结构轻便等特点,成为研究领域热点[1-2];跟踪转台是指向捕获跟踪(Pointing, acquisition and tracking, PAT)系统中一个重要环节,对于激光通信来说,不同的转台结构形式实现着不同的跟踪捕获功能,有十字跟踪架式、单反射镜式、潜望式等结构[3],文中采用单反射镜式光端机,有体积小、功耗小、质量轻的优势。由于单反式PAT反射镜结构形式特殊不易进行温控,故对其设计提出了更高的要求。
PAT反射镜作为单反射镜式激光通信光端机的核心部件,其面形精度直接影响光学系统的成像质量。柔性支撑是影响反射镜面形的一个重要环节,由于温度作用下下材料线涨系数的不匹配性,导致面形变差,为改善反射镜面形精度,又能使反射镜刚度得以保证,国内王克军等人针对空间遥感器大口径反射镜采用复合支撑结构的定位、解耦和释放热应力需求,设计了一种空心圆柱切槽式柔性支撑[4]。该结构简单、实用,能满足定位、解耦和热应力释放,但此柔性支撑在组件中功能并不完美,不能很好地消除装配应力且只适用于大口径反射镜。杨亮针对外形尺寸为Φ
240 mm的小型空间遥感器反射镜采用周边支撑方式设计了一种柔性连接环[5]。该柔性环节的优点是不但可以隔振、消除部分装配应力,同时可以吸收温度变化下材料不匹配产生的能量,缺点是与镜子接触面积小,受力会不均匀。孙宝玉针对空间光学遥感器反射镜组件,设计了一种弯板式柔性支撑[6],柔性支撑设计成双层结构形式,该结构刚度强,但柔性不够。通过上述国内研究现状可见,均未对柔性支撑的关键尺寸做出优化。 文中针对单反射镜式PAT反射镜柔性支撑结构进行了参数化优化设计,系统要求反射镜在重力作用以及环境温度(20±10) ℃时,镜面面形误差RMS值优于λ/40(λ=632.8 nm),组件的一阶谐振频率要求达到300 Hz以上。文中通过反射镜组件材料匹配、支撑方案的设计、支撑结构的参数优化三个方面进行结构设计,并运用有限元方法对组件结构进行分析,最后通过试验验证组件结构满足设计指标要求。
-
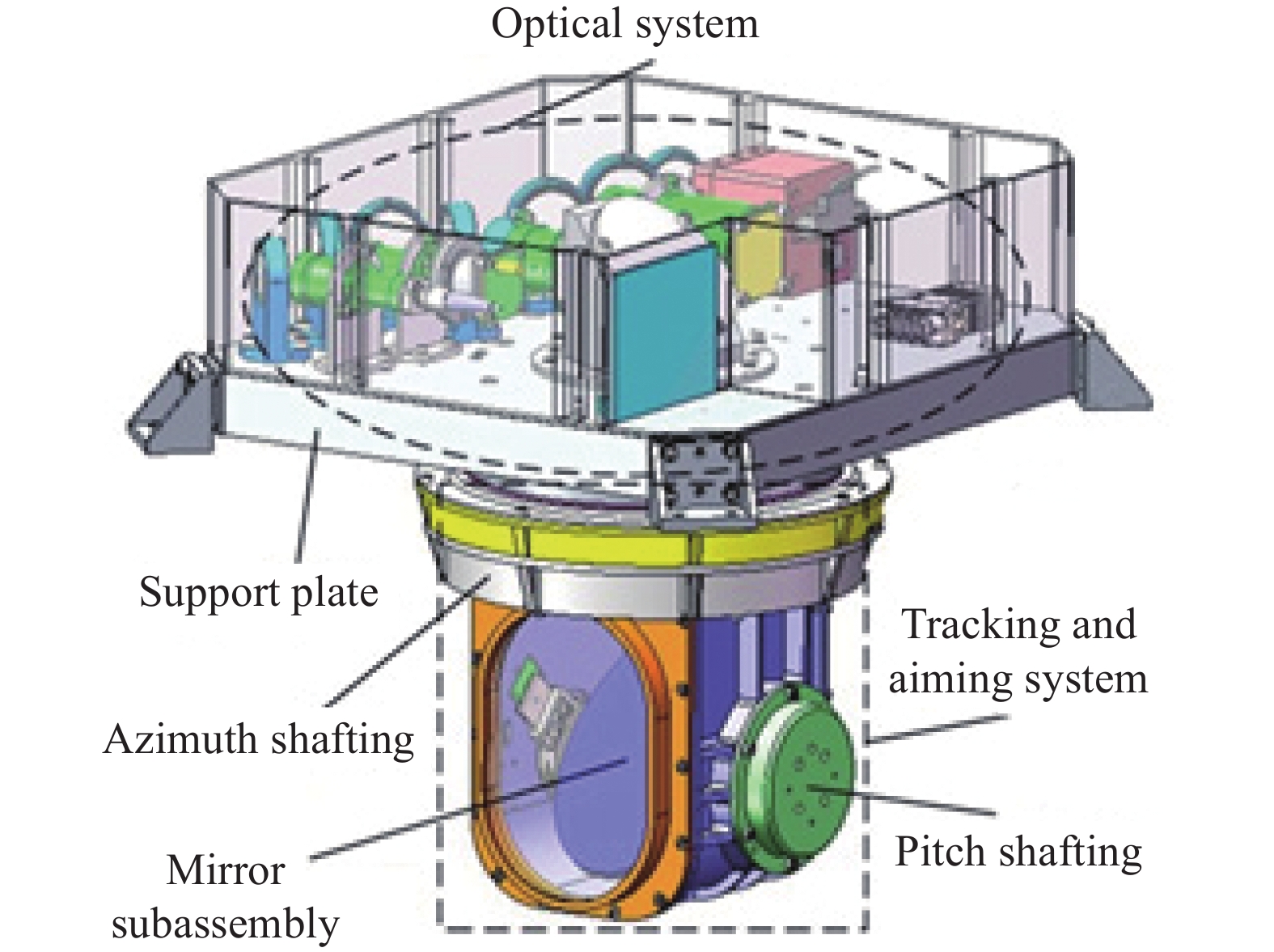
单反射镜式光端机采用一面可二维转动的PAT反射镜,运动范围为-10°~+5°,系统有效通光口径为Φ86 mm,留取设计余量后,反射镜尺寸为长轴直径140 mm,短轴直径90 mm。PAT反射镜转动对光轴角度进行调整,实现通信激光的捕获对准与跟踪,为激光通信链路建立提供基础。某低轨卫星用单反射镜式光端机示意图如图1所示。激光通信端机主要包括光学系统、跟瞄系统以及支撑板等。其中,跟瞄系统又包括方位轴系、俯仰轴系以及反射镜组件。激光通信端机整体通过支撑板与卫星平台连接。

图 1 激光通信端机示意图
Figure 1. Schematic diagram of laser communication terminal device
光端机在轨道运行阶段,随着卫星的飞行,太阳对跟踪机构的照射角度不断变化,受到太阳辐射的影响较为严重。由于单反射镜处于发射口径的最前端,其受影响最为严重,同时受发射空间等限制,在俯仰方向上不易采用遮光罩,故对其温度控制增加了难度。单反射镜工作时的温度环境为(20±10) ℃,其温度条件较常规光学系统±5 ℃的温控条件恶劣许多,因此,在宽温变载荷作用下对反射镜组件的温度稳定性提出了更高的要求。
-
文中设计的反射镜组件包括反射镜、柔性支撑以及背部支撑板。反射镜组件尺寸小,所以柔性支撑和镶嵌件设计为一体,背部支撑板设计成U形结构,以保证镜面与回转轴重合。反射镜材料选用微晶玻璃(Zerodur),因其热振稳定性好,面形抛光周期相对较短,且具有成熟的加工工艺;柔性支撑材料选为铟钢(4J32),其线膨胀系数与反射镜材料相近;背部支撑板选用钛合金(TC4)材料。反射镜组件材料的性能如表1所示。
表 1 反射镜组件材料性能
Table 1. Material properties of reflector components
Part Material ρ/g·cm−3 E/GPa μ α/℃ Mirror Zerodur 2.53 90.6 0.23 0.05×10−6 Support 4J32 8.02 145 0.26 0.3×10−6 Plate TC4 4.44 109 0.29 8.9×10−6 支撑方式采用中心支撑,该支撑方式具有结构简单、工艺性好、抗温度载荷能力强等优势,比较适合尺寸小的反射镜支撑[7-8]。支撑环的大小决定了支撑性能,支撑环过小造成反射镜支撑刚度降低,重力释放造成反射镜面形加大;支撑环尺寸过大,会造成相同温度载荷作用下,支撑材料线胀系数的不匹配引起变形增大,造成反射镜面形破坏。因此,反射镜应该在满足支撑刚度的前提下尽量减小支撑环的尺寸。通过有限元分析,确定支撑环内径尺寸为Φ
=40 mm。柔性支撑与反射镜采用胶粘的方式连接,与背部支撑板通过3个螺钉进行连接。反射镜组件结构示意图如图2所示。 
图 2 反射镜组件结构示意图
Figure 2. Scheme of mirror subassembly
-
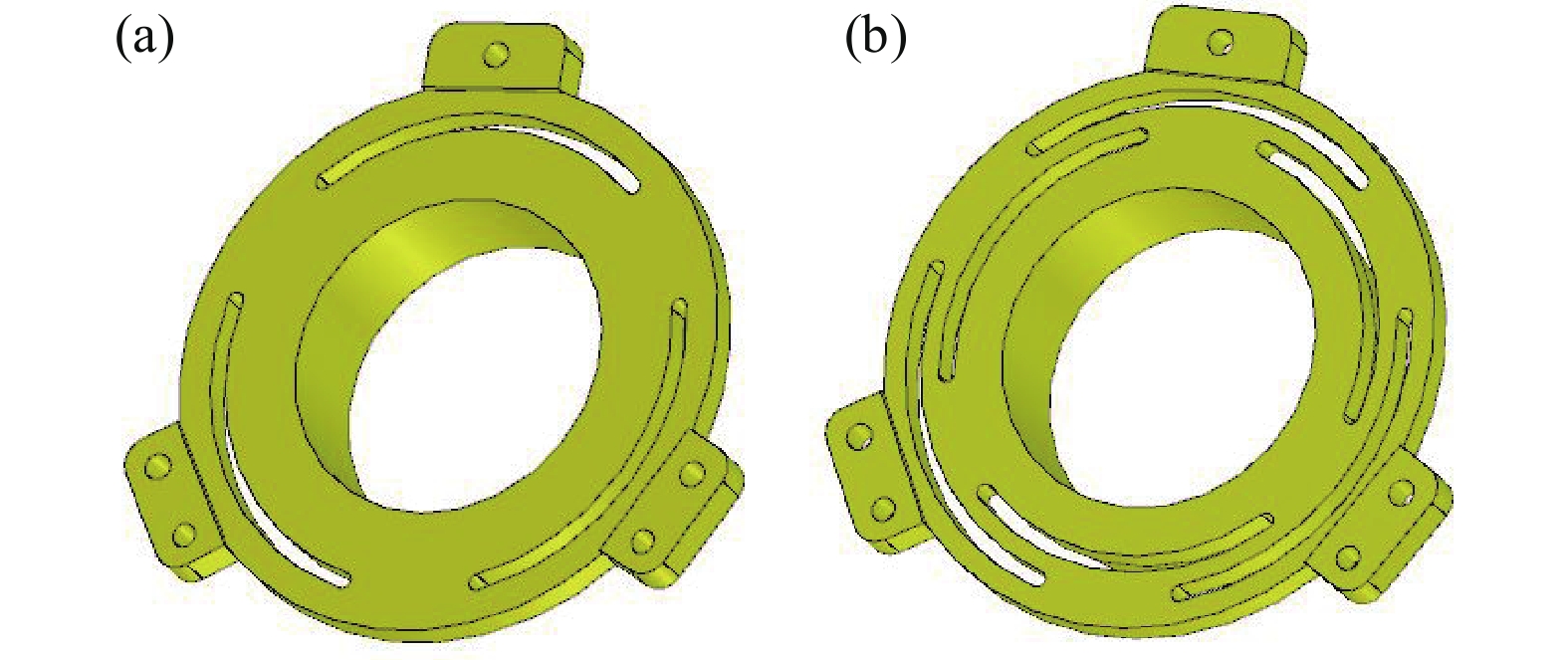
柔性支撑是影响反射镜面形的一个重要环节,文中背部支撑板与柔性支撑是通过三个螺钉进行连接的,导致热变形能直接传递到反射镜上,因此,在三个螺钉孔对应的位置上加工3条穿透底面的圆弧形槽,如图3(a)所示。通过柔性支撑自身变形来吸收支撑与反射镜粘接处的应力。通过优化设计与分析,在极限(柔度最大)条件下,反射镜组件在10 ℃温度变化下的面形精度为PV=λ/7, RMS=λ/37,达不到成像质量要求。

图 3 两种柔性支撑结构示意图
Figure 3. Diagrams of two kinds of flexible support structure
为增加柔度,故采用双层挠性结构,在柔性支撑底面开六条相互交错的槽,即将柔性支撑分成内环和外环两部分,如图3(b)所示。当温度变化时,背部支撑板变形带动外环产生变形,产生的微小变形通过柔性环节吸收,不会传到内环上,所以反射镜不会承受外环变形产生的应力。双层切槽的柔性支撑结构参数较多,为避免参数之间严重耦合,提高柔性支撑优化设计效率,文中采用正交优化方法进行参数设计。
-
双层柔性支撑结构的几何尺寸包括:内环切槽分度圆半径R1;外环切槽分度圆半径R2与内环切槽分度圆半径R1之间的距离的得△R;切槽半径r;切槽圆心θ;外壁厚B。各参数如图4所示。

图 4 柔性支撑结构主要参数示意图
Figure 4. Main parameters of flexible support structure
在实际结构设计时,参数圆心角θ比较好控制,θ的取值范围是0~3/π,根据结构尺寸和加工工艺性确定r≤1 mm,B≤2.5 mm。各参数的取值如表2所示。为了分析参数变化、参数组合变化与反射镜面形精度的关系,采用正交试验法进行参数的组合设计,根据L16(45)标准正交表,用16种结构参数组合完成全部1 024种参数组合的柔性支撑结构参数优化方案[9-10],具体试验参数设置如表3所示。表3中,P表示1 g轴向重力和10 ℃温升共同作用下的面形误差RMS值。
表 2 柔性支撑结构参数因素水平表
Table 2. Level table of parameter factors for flexible support structures
Level Factors △R/mm θ/(°) B/mm R2/mm r/mm 1 2.5 15 1 27 0.25 2 3 30 1.5 27.5 0.5 3 3.5 45 2 28 0.75 4 4 60 2.5 28.5 1 表 3 正交试验方案
Table 3. Orthogonal test scheme
No. △R θ B R2 r P 1 2.5 15 1 27 0.25 15.38 2 2.5 30 1.5 27.5 0.5 16.13 3 2.5 45 2 28 0.7.5 20.04 4 2.5 60 2.5 28.5 1 27.26 5 3 15 1.5 28 1 14.71 6 3 30 1 28.5 0.75 9.54 7 3 45 2.5 27 0.5 18.88 8 3 60 2 27.5 0.25 20.17 9 3.5 15 2 28.5 0.5 9.34 10 3.5 30 2.5 28 0.25 12.79 11 3.5 45 1 27.5 1 8.08 12 3.5 60 1.5 27 0.75 12.66 13 4 15 2.5 27.5 0.75 22.35 14 4 30 2 27 1 10.73 15 4 45 1.5 28.5 0.25 13.28 16 4 60 1 28 0.5 19.54 利用正交试验的结果综合分析各因素的影响,对其结果极差分析确定主次因素。各因素极差结果如表4所示。N1、N2、N2、N4分别表示五个因素的四个水平条件下主镜面形RMS值的平均值。R为因素的全部水平平均值中最大值与最小值之差,即极差值,极差越大表明某个因素下所选的水平对面形误差RMS值影响越大。
表 4 因素极差分析
Table 4. Range analysis of factors
Number A B C D E Factors △R θ B R2 r N1 19.7 15.45 13.14 14.41 15.4 N2 15.83 12.29 14.19 16.68 15.97 N2 10.72 15.07 15.07 16.77 16.15 N4 16.48 19.41 19.82 14.86 15.19 R 8.98 7.12 6.68 2.36 0.96 通过极差分析得出了各因素对反射镜面形精度的影响次序为:两分度圆之间距离△R>切槽圆心角θ>外壁厚B>内环切槽分度圆半径R1>切槽半径r。根据四个水平的面形平均值,考虑到面形精度越好时,均值越小,所以1 g轴向重力和10℃温升共同作用下的最佳参数组合为:A3B2C1D1E4,即△R=3.5mm,θ=30°,B=1 mm,R1=2.7 mm,r=1 mm。
考虑到切槽圆心角θ取值间隔较大,参数取值不一定最佳,以θ=30°为中间值,每间隔5°取一个值,上下分别取到45°和15°,其余参数不变,建立不同的柔性支撑结构并进行有限元分析。图5表示不同切槽圆心角与组件的动态刚度和反射镜面形RMS之间的关系,由图可知,切槽圆心角θ越小面形越好,但刚度越差。为了保证空间反射镜在外界振动环境影响下有良好的成像质量,需要反射镜具有良好的动态刚度,故满足面形精度的前提下让刚度越大,由图可见,θ的最佳范围在25°左右,在这里取θ=25°。最终参数组合为△R=3.5 mm,θ=25°,B=1 mm,R1=2.7 mm,r=1 mm。

图 5 圆心角θ与面形RMS值及组件动态刚度之间的关系
Figure 5. Relationship between the center angle of grooved circle θ, RMS of surface shape and dynamic stiffness of assembly
圆弧形切槽能使柔性支撑结构具有较小的应力集中,能很好的提高面形精度,因此,在确定圆弧形切槽柔性支撑结构的各参数以后,对槽端进行合理的应力分散优化,用半径较大的圆弧面取代半径小的圆弧面,有助于分散应力,避免应力集中。槽端优化后的柔性支撑结构如图6所示。

图 6 柔性支撑结构示意图
Figure 6. Schematic diagram of flexible support structure
-
为了验证结构的动态刚度,利用hypermesh建立反射镜组件的有限元模型,如图7所示,对其进行模态分析,边界条件定义为反射镜支撑背板与转台连接位置的节点六自由度全约束,与组件实际安装工况一致。组件前三阶模态分析结果如表5所示。

图 7 反射镜组件有限元模型
Figure 7. Finite element model of mirror subassembly
表 5 反射镜组件模态分析结果
Table 5. Results of modal analysis of mirror subassembly
Order Fz/Hz Mode of vibration 1 352.61 Around X axis direction 2 486.29 Around Y axis direction 3 488.98 Around Y axis direction 由表5可知,反射镜组件一阶固有频率为352.61 Hz大于指标规定的300 Hz固有频率,振型为反射镜绕X轴摆动,结果云图如图8所示,因此反射镜组件完全满足结构动态刚度要求。

图 8 模态分析云图
Figure 8. Modal analysis nephogram
-
对反射镜组件在X、Y、Z 三个方向重力以及10 ℃温度变化影响下的力热耦合分析结果如表6所示。
表 6 10 ℃温升(降)和1 g自重作用下反射镜面形精度分析结果(单位:nm)
Table 6. Analysis results of mirror surface error under 10 ℃ uniform temperature rise(reduction) and 1 g gravity(Unit: nm)
Load case direction Temperature rise Temperature reduction PV RMS PV RMS X λ/10.84 λ/58.27 λ/10.69 λ/57.84 Y λ/10.76 λ/58.11 λ/10.84 λ/57.79 Z λ/10.14 λ/54.97 λ/11.4 λ/60.61 从表6的分析结果可见,反射镜组件在1 g重力载荷以及10 ℃均匀温升、温降的共同作用下最大面形误差PV值为λ/10.14,RMS值为λ/54.79,满足面形精度要求。
-
反射镜组件实物如图9(a)所示,整机装配图如图9(b)所示。使用ZYGO激光干涉仪在(20±10)℃温度范围内对反射镜组件进行面形检测,检测结果如表7所示,检测系统如图10所示,图11为不同温度下反射镜面形的检测结果。
表 7 反射镜组件面形检测结果(单位: nm)
Table 7. Results of mirror subassembly surface shape testing(Unit: nm)
Temperature/℃ PV RMS 10 λ/6.62 λ/43 20 λ/6.94 λ/52 30 λ/6.9 λ/50 
图 9 反射镜组件实物图与整机装配图
Figure 9. Mirror subassembly object and assembly drawing of the whole machine

图 10 反射镜组件面形检测系统
Figure 10. System for mirror subassembly surface shape testing

图 11 不同温度下反射镜组件面形检测结果
Figure 11. Results of mirror subassembly surface shape testing at different temperatures
表7的试验结果表明,在(20±10) ℃温度范围内,反射镜面形均满足指标要求。
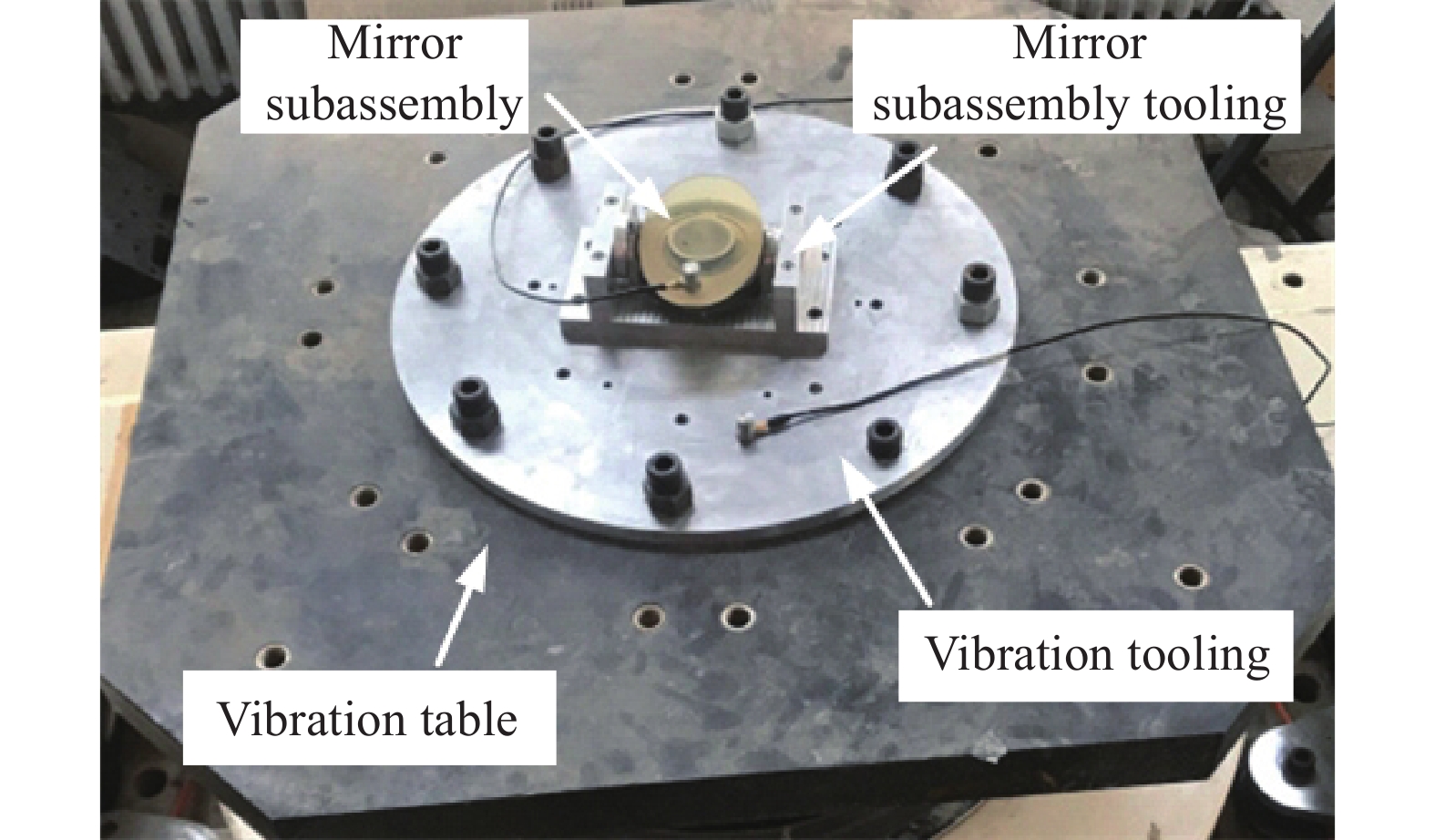
通过0.2 g正弦扫频试验来验证反射镜柔性支撑的结构刚度,正弦扫频振动实验装置如图12所示。在反射镜镜面安装传感器,测该点的响应曲线如图13所示。由响应曲线可知,反射镜组件Z向一阶谐振频率为362.53 Hz,与模态分析结果的相对误差为2.7%,分析结果相对准确。

图 12 反射镜组件正弦扫频试验现场
Figure 12. Sweep sine response test site of mirror subassembly

图 13 Z向正弦扫频试验曲线
Figure 13. Sweep sine response curve under Z vibration
-
为保证单反射镜式光端机反射镜在恶劣环境下的动态刚度以及面形精度,提出了一种柔性支撑结构方案。利用有限元分析技术对柔性支撑结构进行了参数化设计,并根据正交优化方法对其参数进行优化,得到了满足设计要求的柔性支撑结构。经过有限元分析,反射镜组价基频为352.61 Hz;在(20±10) ℃温度范围内,反射镜面形PV值为λ/10.14,RMS值为λ/54.79,优于λ/40的指标要求。使用ZYGO激光干涉仪对反射镜在不同温度下进行面形检测,试验结果表明反射镜面形RMS值优于λ/40的设计值。因此,柔性支撑的参数化设计使反射镜组件的结构刚度和热稳定性满足了系统的设计要求。
Parametric design and test of flexible support for mirror of single trans optical terminal
-
摘要: 为保证单反式光端机指向捕获跟踪(Pointing, acquisition and tracking, PAT)时反射镜在恶劣空间环境下的面形精度,设计了一种底面开槽的柔性支撑结构。由于柔性支撑结构参数较多,为避免各参数之间严重耦合,采用正交优化方法对柔性支撑结构进行参数优化设计,再利用有限元方法对反射镜组件进行热力学特性分析。仿真分析结果表明,反射镜组件一阶频率为352.61 Hz,在1g重力和10 ℃温升(温降)共同作用下的最大面形误差RMS为λ/54.79(λ=623.8 nm),能够满足动、静态刚度和热尺寸稳定性要求。使用ZYGO干涉仪在(20±10) ℃温度范围内对反射镜面形进行检测,结果表明,反射镜面形PV值优于λ/6,RMS优于λ/43,满足RMS≤λ/40的指标要求。实验结果表明,柔性支撑参数设计可靠,满足使用要求。Abstract: In order to ensure the surface accuracy of the Pointing, Acquisition and Tracking (PAT) mirror in the harsh space environment, a flexible support structure with grooves on the bottom was designed. Due to the large number of parameters of flexible support structure, in order to avoid serious coupling between parameters, the orthogonal optimization method was used to optimize the parameters of flexible support structure, and then the finite element method was used to analyze the mechanical and thermal characteristics of mirror components. The simulation results show that the first-order frequency of the mirror module is 352.61 Hz, and the maximum surface error RMS under the combined action of 1 g gravity and 10 ℃ temperature rise (temperature drop) is λ/54.79(λ=632.8 nm), which can satisfy the dynamic and static stiffness and thermal dimensional stability. The ZYGO interferometer is used to detect the mirror surface shape in the temperature range of (20±10) ℃. The results show that the PV value of the mirror surface is better than λ/6, and the RMS is better than λ/43, which meets the requirement of RMS≤λ/40. The experimental results show that the design of flexible support parameters is reliable and meets the application requirements.
-
Key words:
- laser communication /
- mirror /
- flexible support /
- orthogonal optimization /
- parametric design
-
图 5 圆心角θ与面形RMS值及组件动态刚度之间的关系
Figure 5. Relationship between the center angle of grooved circle θ, RMS of surface shape and dynamic stiffness of assembly
图 9 反射镜组件实物图与整机装配图
Figure 9. Mirror subassembly object and assembly drawing of the whole machine
图 11 不同温度下反射镜组件面形检测结果
Figure 11. Results of mirror subassembly surface shape testing at different temperatures
表 1 反射镜组件材料性能
Table 1. Material properties of reflector components
Part Material ρ/g·cm−3 E/GPa μ α/℃ Mirror Zerodur 2.53 90.6 0.23 0.05×10−6 Support 4J32 8.02 145 0.26 0.3×10−6 Plate TC4 4.44 109 0.29 8.9×10−6  下载: 导出CSV
下载: 导出CSV
表 2 柔性支撑结构参数因素水平表
Table 2. Level table of parameter factors for flexible support structures
Level Factors △R/mm θ/(°) B/mm R2/mm r/mm 1 2.5 15 1 27 0.25 2 3 30 1.5 27.5 0.5 3 3.5 45 2 28 0.75 4 4 60 2.5 28.5 1
下载: 导出CSV
表 3 正交试验方案
Table 3. Orthogonal test scheme
No. △R θ B R2 r P 1 2.5 15 1 27 0.25 15.38 2 2.5 30 1.5 27.5 0.5 16.13 3 2.5 45 2 28 0.7.5 20.04 4 2.5 60 2.5 28.5 1 27.26 5 3 15 1.5 28 1 14.71 6 3 30 1 28.5 0.75 9.54 7 3 45 2.5 27 0.5 18.88 8 3 60 2 27.5 0.25 20.17 9 3.5 15 2 28.5 0.5 9.34 10 3.5 30 2.5 28 0.25 12.79 11 3.5 45 1 27.5 1 8.08 12 3.5 60 1.5 27 0.75 12.66 13 4 15 2.5 27.5 0.75 22.35 14 4 30 2 27 1 10.73 15 4 45 1.5 28.5 0.25 13.28 16 4 60 1 28 0.5 19.54
下载: 导出CSV
表 4 因素极差分析
Table 4. Range analysis of factors
Number A B C D E Factors △R θ B R2 r N1 19.7 15.45 13.14 14.41 15.4 N2 15.83 12.29 14.19 16.68 15.97 N2 10.72 15.07 15.07 16.77 16.15 N4 16.48 19.41 19.82 14.86 15.19 R 8.98 7.12 6.68 2.36 0.96
下载: 导出CSV
表 5 反射镜组件模态分析结果
Table 5. Results of modal analysis of mirror subassembly
Order Fz/Hz Mode of vibration 1 352.61 Around X axis direction 2 486.29 Around Y axis direction 3 488.98 Around Y axis direction
下载: 导出CSV
表 6 10 ℃温升(降)和1 g自重作用下反射镜面形精度分析结果(单位:nm)
Table 6. Analysis results of mirror surface error under 10 ℃ uniform temperature rise(reduction) and 1 g gravity(Unit: nm)
Load case direction Temperature rise Temperature reduction PV RMS PV RMS X λ/10.84 λ/58.27 λ/10.69 λ/57.84 Y λ/10.76 λ/58.11 λ/10.84 λ/57.79 Z λ/10.14 λ/54.97 λ/11.4 λ/60.61
下载: 导出CSV
表 7 反射镜组件面形检测结果(单位: nm)
Table 7. Results of mirror subassembly surface shape testing(Unit: nm)
Temperature/℃ PV RMS 10 λ/6.62 λ/43 20 λ/6.94 λ/52 30 λ/6.9 λ/50
下载: 导出CSV
-
[1] 姜会林, 佟首峰. 空间激光通信技术与系统[M]. 北京: 高等教育出版社, 2010. Jiang Huilin, Tong Shoufeng. Space Laser Communication Technology and System[M]. Beijing: Higher Education Press, 2010. (in Chinese) [2] 高铎瑞, 李天伦, 孙悦, 等. 空间激光通信最新进展与发展趋势[J]. 中国光学, 2018, 11(6): 901−913. doi: 10.3788/co.20181106.0901 Gao Duorui, Li Tianlun, Sun Yue, et al. Latest developments and trends of space laser communication [J]. Chinese Optics, 2018, 11(6): 901−913. (in Chinese) doi: 10.3788/co.20181106.0901 [3] 高国华, 汪进. 某伺服跟踪转台结构设计与模态分析[J]. 机械设计, 2018, 35(S1): 151−154. Gao Guohua, Wang Jin. Structure design and modal analysis of a servo tracking turntable [J]. Journal of Machine Design, 2018, 35(S1): 151−154. (in Chinese) [4] 王克军, 董吉洪, 宣明, 等. Whiffletree结构中的柔节设计[J]. 长春理工大学学报(自然科学版), 2015, 38(4): 12−17. Wang Kejun, Dong Jihong, Xuan Ming, et al. Flexibility design in whiffletree structure [J]. Journal of Changchun University of Science and Technology(Natural Science Edition), 2015, 38(4): 12−17. (in Chinese) [5] 杨亮. 空间反射镜柔性支撑设计与分析[J]. 光机电信息, 2010, 27(12): 104−108. Yang Liang. Design and analysis of flexible support for space mirror [J]. Ome Information, 2010, 27(12): 104−108. (in Chinese) [6] 孙宝玉. 基于CAE的光学反射镜柔性结构设计与分析[J]. 光电工程, 2009, 36(1): 103−106. doi: 10.3969/j.issn.1003-501X.2009.01.020 Sun Baoyu. Design and analysis of flexible structure of optical mirror based on CAE [J]. Opto-Electronic Engineering, 2009, 36(1): 103−106. (in Chinese) doi: 10.3969/j.issn.1003-501X.2009.01.020 [7] 王小勇, 张博文, 郭崇岭, 等. 3 m口径空间反射镜的参数优化[J]. 红外与激光工程, 2019, 48(S1): S118002. Wang Xiaoyong, Zhang Bowen, Guo Chonglin, et al. Parameter optimization of 3 m aperture space mirror [J]. Infrared and Laser Engineering, 2019, 48(S1): S118002. (in Chinese) [8] 李慎华. 空间相机反射镜及其支撑结构优化设计研究[D]. 长春: 长春工业大学, 2018. Li Shenhua. Design of two-axis flexible supporting structure for space camera fast mirror[D]. Changchun: Journal of Changchun University of Technology, 2018. (in Chinese) [9] 余文涛, 夏宏南. 涡流排水采气正交优化影响因素分析[J]. 中国锰业, 2019, 37(2): 39−42. Yu Wentao, Xia Hongnan. Analysis of the influencing factors of orthogonal optimization of eddy current drainage gas production [J]. China's Manganese Industry, 2019, 37(2): 39−42. (in Chinese) [10] 刘伟达, 孟立新, 张树仁, 等. GEO激光通信系统主镜组件优化设计[J]. 红外与激光工程, 2016, 45(12): 1218004. doi: 10.3788/IRLA201645.1218004 Liu Weida, Meng Lixin, Zhang Shuren, et al. Optimum design of primary mirror component for geo laser communication system [J]. Infrared and Laser Engineering, 2016, 45(12): 1218004. (in Chinese) doi: 10.3788/IRLA201645.1218004 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 1007
- HTML全文浏览量: 420
- PDF下载量: 42
- 被引次数: 0

