

















-
大口径平面元件是一些重大科研项目中不可或缺的组成部分,是检测光学系统和工程仪器的重要光学设备[1-5]。大口径平面镜经常用于搭建光学系统的自准直光路,是检测或标定其它光学系统的基准,因此研制高面形精度的大口径平面镜具有重要意义[4-8]。
随着平面镜口径的增大,常用的平面干涉仪已经不能满足直接检测的需求。目前对于口径达到1 m级以上的平面镜检测技术主要有五棱镜法[9]、子孔径拼接法[2]、斜入射法[3]、刀口阴影法[1]和瑞奇-康芒法[10]。其中五棱镜法和子孔径拼接法检测过程中需要精度高、行程大的二维工件台,而且检测过程长、恢复面形的算法复杂,实现高精度检测比较困难。斜入射法只能在单一方向上扩展测量口径,且操作过程繁琐。刀口阴影法只能实现对平面的半定量检测,很大程度上依赖于操作人员的经验来判定面形误差的量值,检测结果因人而异[11]。瑞奇-康芒检测技术,相对于其他检测方法来说其经济性、可操作性较好,只需要一块口径约为平面镜1.3倍的球面镜作为参考镜即可。由于球面镜加工手段简单、技术成熟,所以该实验操作易于实现且具有较好的稳定性[11]。
国外对大口径平面镜的研制与检测技术相对成熟;近年来,国内根据发展需要也对大口径平面镜的生产检测展开了研究[1-9]。2012年,南京理工大学的张宗采用瑞奇-康芒检测技术[10],用4D干涉仪对生产的1.1 m口径平面镜进行检测,其中搭建的测试腔长长达8 m。2018年,中国科学院长春光学精密机械与物理研究所生产研制出国内最大口径的1.5 m平面镜,并采用了瑞奇-康芒法对其检测[9-13];其中搭建的测试腔长长达12 m左右。随着空间相机、天文观测的应用需求的进一步扩展,国内外主流观测设备已经向着2~2.5 m量级推进,可以预见如果要校准这些2 m以上的光学系统,必须要使用2 m口径的平面镜。目前针对2 m级平面镜的研制还未见报道。此外,随着平面镜口径进一步增大,检测2 m口径平面镜的光路可能进一步加长,受到气流、温度、湿度、及程序处理能力等多方面因素影响加大,导致面形检测精度下降 [14],检测可靠性降低。
针对以上问题,文中研究了一种基于单位激励法与逆向复算的Φ2 m平面镜面形检测技术。其中瑞奇-康芒光路中的标准球面镜采用了南京天文仪器研制中心研制的Φ2.7 m球面镜[11]。对检测过程中气流扰动和球面镜误差进行仿真分析。通过改变光路中的压强、温度等值来改变空气折射率,模拟环境因素对测试结果的影响;利用光学软件复算对其结果进行验证。该方法根据单位激励影响矩阵法克服了传统影响矩阵法需要人为推导以及大F数假定的限制[5];逆向复算通过对比验证系统波像差,降低随机误差与几何测量误差的影响,提升面形计算结果的可靠性。这对于Φ2 m平面检测具有重大的现实应用意义,也为更大口径标准平面的确定性检测提供研究思路。
-
采用瑞奇-康芒方法检测Φ2 m平面镜原理如图1所示[1-5],干涉仪发出的准直光经过标准球面镜头变成一束有焦点的发散光出射,这个焦点与反射球面镜的曲率中心重合。干涉仪发出的光束到达2 m平面镜,经平面镜反射传播到2.7 m球面镜,再依次经球面镜、平面镜反射返回至干涉仪,与干涉仪中的参考光束形成干涉。将主光线与平面镜法线的夹角称为瑞奇角θ。根据公式(1)采用单位激励影响矩阵法可对待测2 m平面镜进行面形恢复[4-5]。
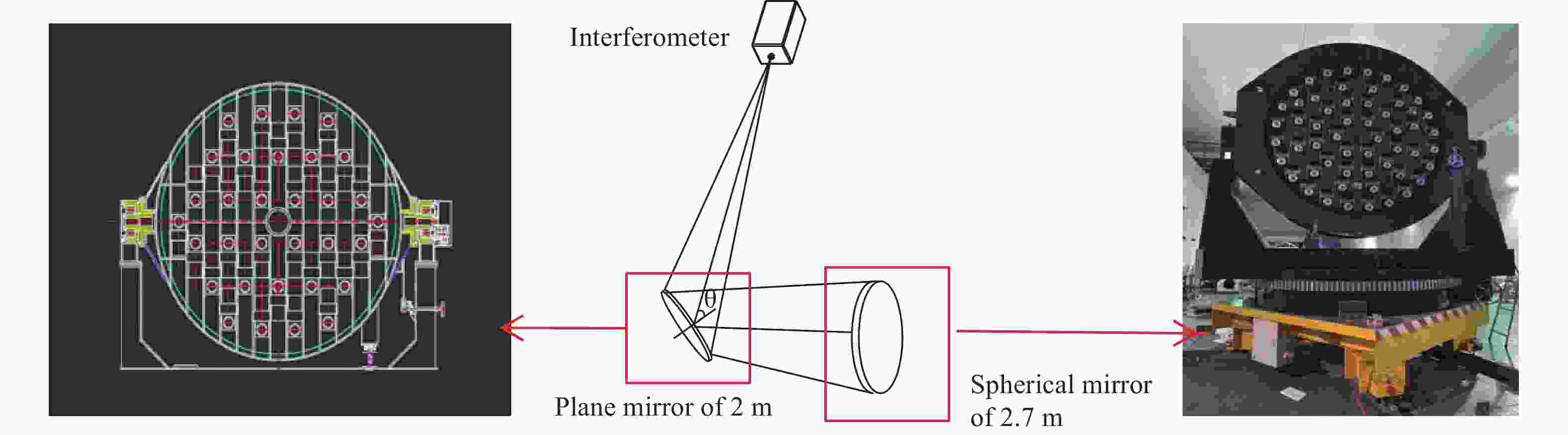
图 1 瑞奇-康芒检测原理示意图
Figure 1. Schematic diagram of Ritchey-Common detection principle
$$ \begin{split} \\ A\cdot S=W \end{split} $$ (1) 式中:W表示系统波像差Zernike系数向量;A表示影响系数矩阵;S表示平面面形Zernike系数向量。单位激励法是构建仅包含一种Zernike波像差下的系统波像差分布,对其前N项Zernike波像差依次进行遍历,拟合求解出影响系数矩阵A[5]。再使用干涉仪测量某一瑞奇角下的系统波像差即W测量,经拟合处理得到W;最后根据A和W求解出面形系数S得到平面镜面形。
在实际测量W测量时受到各种因素的影响如:气流扰动、球面镜误差、声音、人员走动等,此时W测量是真实值与扰动值的总和,即:
$$ {W}_{测量}\text={W}_{真实}\text+{W}_{扰动误差} $$ (2) 根据检测过程实际情况,若仅考虑空气扰动和球面镜误差对测量结果的影响,则平面镜实际真实面形计算可表示为:
$$ {S}_{真实}\approx {\left({A}^{T}A\right)}^{-1}\cdot\left({W}_{测量}-{W}_{球面镜误差}-{W}_{气流扰动}\right) $$ (3) 下文分别就气流扰动和球面镜误差对面形恢复的影响进行讨论:对于气流扰动误差而言,由于在2 m平面镜上端和下端存在温度、压强等梯度分布,在上下气流随时交换过程中,是个随机变化量; 其中气流扰动将会引起空气折射率的变化,即:
$$ \begin{split} n=& \frac{273.15}{1\;013.25}\cdot\frac{P}{T}\cdot\left(287.615\;5+\frac{4.886\;60}{{\lambda }^{2}}+\frac{0.068\;00}{{\lambda }^{4}}\right)-\\&11.27\frac{{e}}{T}\\[-10pt] \end{split} $$ (4) 式中:n代表空气折射率;P代表当前空气的压强;T代表当前空气的温度;e代表当前空气水汽压;λ代表所用激光光源的光学波长。
因为在测量路径上某一点的温度为随机变化量,使得折射率随机变化进而导致影响光程差的变化,导致相位发生变化,即:
$$ {W}_{气流扰动}\text=f\left[{\displaystyle {\int }_{0}^{d}{f}_{2}\left({n}_{\left(r\right)}\right){\rm{d}}r}\right] $$ (5) 式中:n(r)表示干涉仪镜头距离平面镜距离为r处的折射率;W气流扰动表示由于气流扰动引起的系统波像差的变化量。因此W气流扰动是随着n变化的随机变量,导致由公式(3)计算出来的平面镜面型随机变化。
若仅考虑球面镜误差,根据平面镜、球面镜系统波像差Zernike多项式推导,可表示为:
$$ {W}_{测量}-{W}_{球面镜误差}={\displaystyle \sum _{n=0}^{N}\left[{\displaystyle \sum _{\left({x}_{s},{y}_{s}\right)}\left({m}_{测量}-{m}_{球面镜误差}\right)\cdot{Z}_{n}}\right]} $$ (6) 式中:m测量代表某一瑞奇角度下干涉仪对平面镜测得的波前图预处理之后的像素点系数矩阵;m球面镜误差代表某一瑞奇角度下干涉仪对球面镜测得的波前图预处理之后的像素点系数矩阵;(xs,ys)代表平面镜坐标系下所有像素点对应的坐标;Zn代表Zernike多项式基底。
将公式(6)结合影响矩阵Zernike展开形式,则公式(3)可表示成公式(7),平面镜面形系数向量为在平面镜每一像素点坐标下A的前N项Zernike系数矩阵的逆与W测量的前N项Zernike系数向量相乘;最后对平面镜面形系数向量进行拟合即可恢复出面形。
$$ {S}_{真实}\approx {\displaystyle \sum _{n=0}^{N}{\displaystyle \sum _{\left({x}_{s},{y}_{s}\right)}\left\{{\left({m}_{影响}\cdot{Z}_{n}\right)}^{{-1}}\cdot\left[\left({m}_{测量}-{m}_{球面镜误差}\right)\cdot{Z}_{n}\right]\right\}}} $$ (7) $$ {S}_{误差}\approx {\displaystyle \sum _{n=0}^{N}{\displaystyle \sum _{\left({x}_{s},{y}_{s}\right)}\left\{{\left({m}_{影响}\cdot{Z}_{n}\right)}^{{-1}}\cdot\left[{m}_{球面镜误差}\cdot{Z}_{n}\right]\right\}}} $$ (8) 式中:m影响代表用单位激励方法求得影响矩阵的系数矩阵。 由公式(8)可以看出,真实的平面镜面形误差受到球面镜误差的影响。而球面镜面形又受多种因素的影响,例如加工误差、支撑结构、环境影响等。
综上,通过上述理论分析,可以看出在实际检测大口径平面镜过程中,会受到随机误差和固定误差的影响,所以需要提出一种方法在瑞奇-康芒检测中提升算法的可靠性。
-
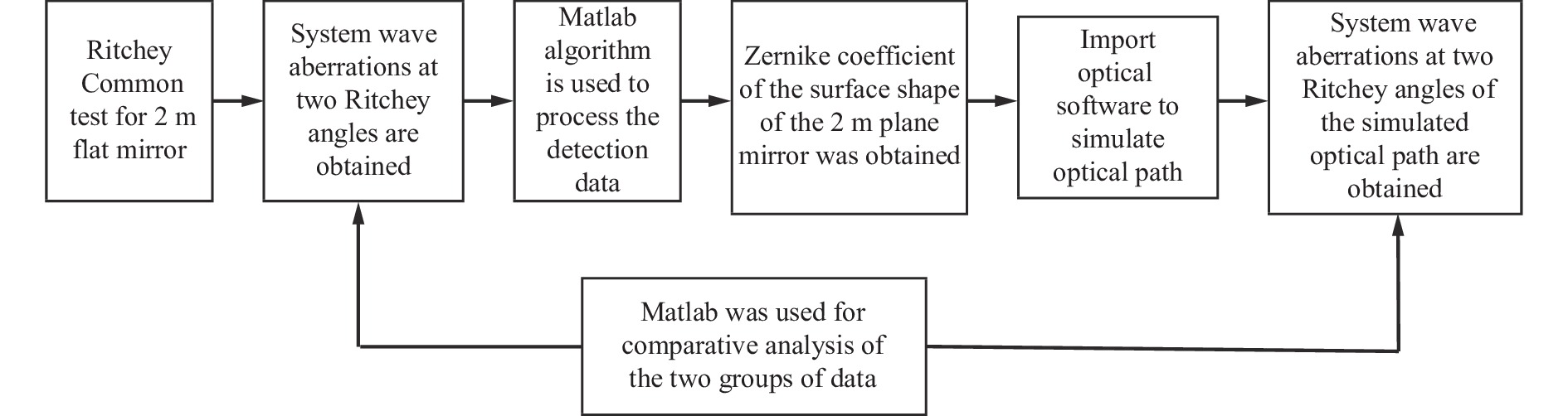
由于经实验测得的W测量本身受气流、温度、球面镜误差等各种因素的干扰;并且在拟合求解平面镜面形S时,还需要测量平面镜中心到干涉仪焦点的距离d、瑞奇角等数值。因此为了验证该算法对大口径平面镜面形检测的精度,用光学设计软件对其检测结果进行逆向验证。其基本思想为:由公式(1)可得,根据影响矩阵A以及W可恢复出平面镜面形S。将恢复的2 m平面镜面形的Zernike系数导入光学设计软件中,设置与检测时相同的参数(即:干涉仪中心到平面镜中心的距离、球面镜中心到平面镜的距离、球面镜的曲率半径、平面镜与球面镜的直径、瑞奇角度)进行检测光路模拟,分别在两个瑞奇角下获得W复算。将实验测得的W测量与光学软件复算得到的W复算进行对比分析,以验证计算数据的可靠性。整个闭环检测原理思路如图2所示。
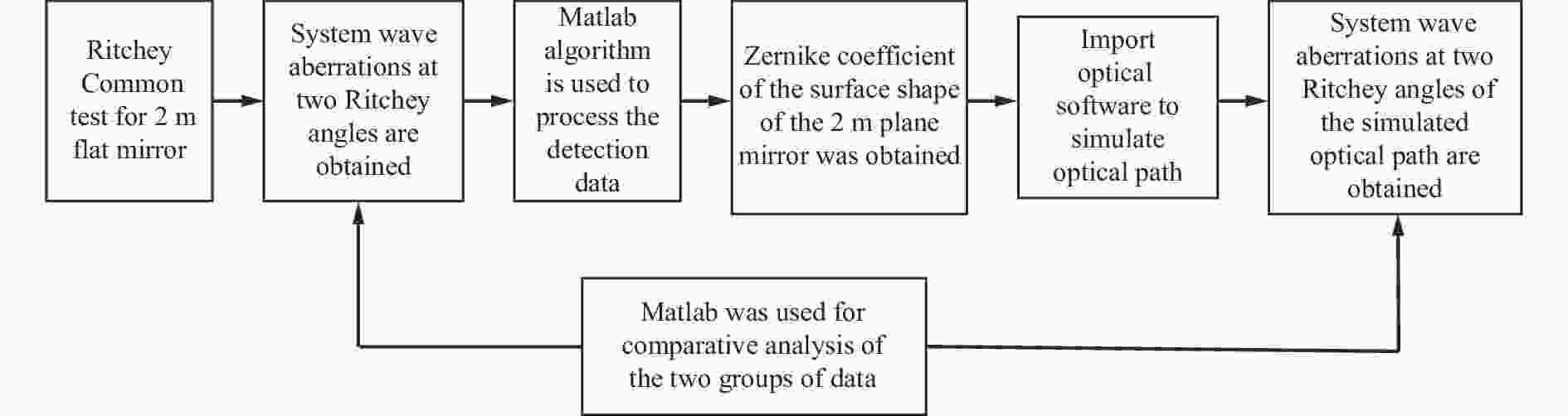
图 2 闭环检测原理示意图
Figure 2. Schematic diagram of closed-loop detection principle
-
为了验证逆向复算的合理性与正确性,这里取前66项Zernike多项式构建2 m标准平面镜作为被测面形;其中构建的标准平面镜RMS值为0.0343λ,PV值为0.2771λ。根据瑞奇-康芒检测中由被测平面镜面形得到系统波像差的对应公式转换关系[4-5],在平面镜中心到干涉仪距离d=18175 mm,瑞奇角分别为29.33°和47.07°下构建光瞳坐标系下系统波像差分布图,分别如图3(a)和(b)所示,47.07°对应的波像差分布图的RMS值为0.0946λ,峰谷PV值为0.7303λ;29.33°对应的波像差分布图的RMS值为0.1205λ,峰谷PV值为0.9411λ。

图 3 光瞳坐标系下系统波像差分布图
Figure 3. System wave aberration distribution in pupil coordinate system
采用单位激励法对两个瑞奇角下的W进行处理,根据公式(1)即可恢复出被测的平面镜面形。RMS值为0.0343λ,PV值为0.2771λ。为了进一步验证该算法检测2 m平面镜的可靠性,以及验证用光学设计软件对恢复的平面镜面形进行逆向复算的合理性与正确性。将恢复出的2 m平面镜面形的Zernike系数导入光学设计软件,并搭建与2 m平面镜现场测量时相同的实验参数(平面镜口径、球面镜曲率及口径、光路长度、瑞奇角度)进行光路仿真,在瑞奇角为47.07°和29.33°时分别获得W复算如图4(a)和(b)所示;47.07°对应的W复算RMS值为0.0944λ,峰谷PV值为0.6106λ;29.33°对应的W复算RMS值为0.1200λ,峰谷PV值为0.8481λ。
分析W复算与Matlab理论仿真获得的W测量误差大小,结果显示,47.07°下仿真获得的W处理之后的RMS为0.0946λ、PV0.730 3λ,光学软件逆向复算获得的W处理之后的RMS为0.0944λ、PV0.610 6λ;得到两者RMS误差为0.0002λ。同理,29.33°下仿真获得的W处理之后的RMS为0.1205λ、PV0.941 1λ,光学软件逆向复算获得的W处理之后的RMS为0.1200λ、PV0.848 1λ;得到两者RMS误差为0.0005λ。比分析后可得,47.07°和29.33°的W仿真结果与逆向复算结果RMS和PV误差较小,数据较吻合,表明该方法对于2 m平面镜检测及其面形结果验证是可行的。
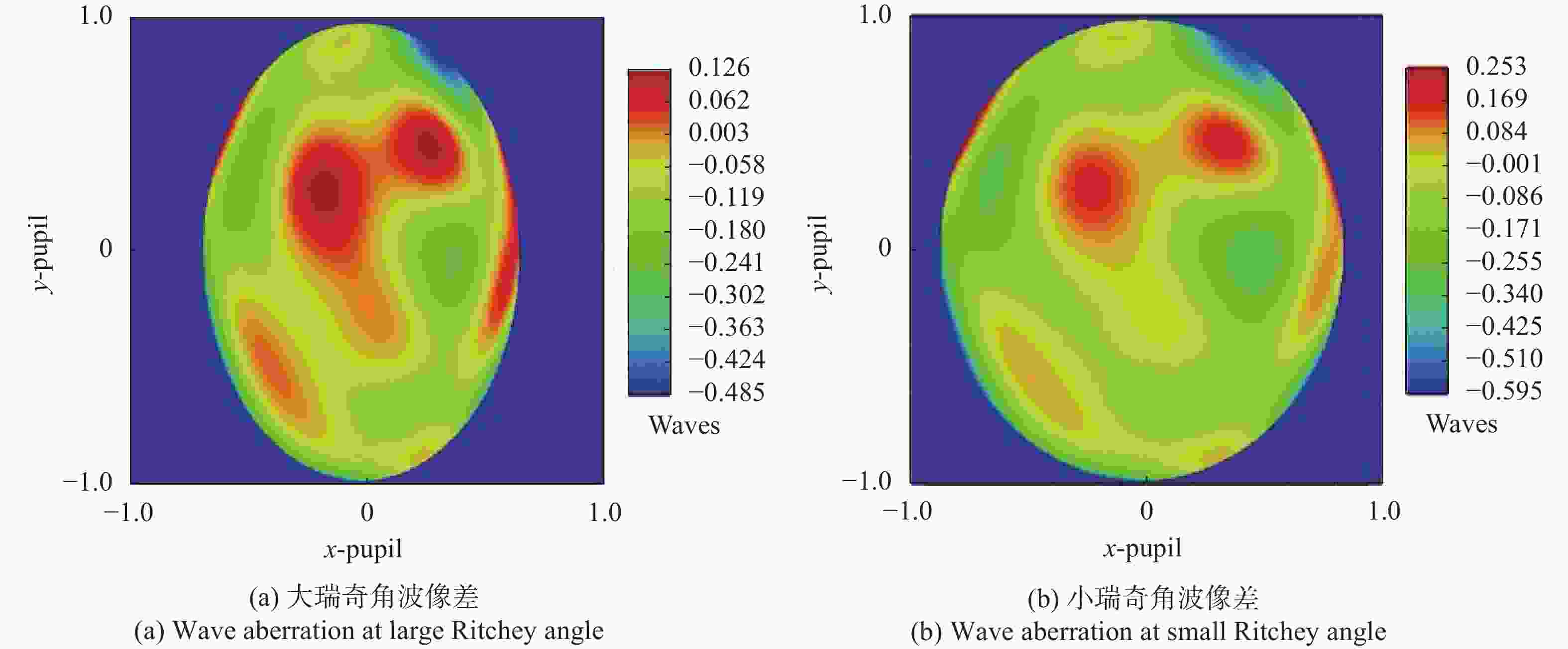
图 4 光学软件逆向复算获得的系统波像差分布图
Figure 4. Wave aberration distribution of system obtained by reverse calculation of optical software
-
由于该平面镜口径较大,搭建的瑞奇-康芒检测光路较长,这将导致光路中各处的压强、温度、以及水汽压分布不均匀而存在空气湍流。空气扰动会引起干涉条纹附加相位的移动,这将直接影响W测量,最后导致解算的平面镜面形与实际真实面形有所偏差。根据公式(4),现用仿真的方法,通过改变光路中的压强、温度、等值来改变空气折射率,模拟环境因素对测试结果的影响。
这里以2.1节仿真面形作为实际标准面形,并且根据公式(5)模拟仿真随机扰动W气流扰动将干扰后的数据进行拟合恢复出平面面形,其中恢复出的平面镜面形的RMS与参考的实际面形的RMS数值如图5所示。
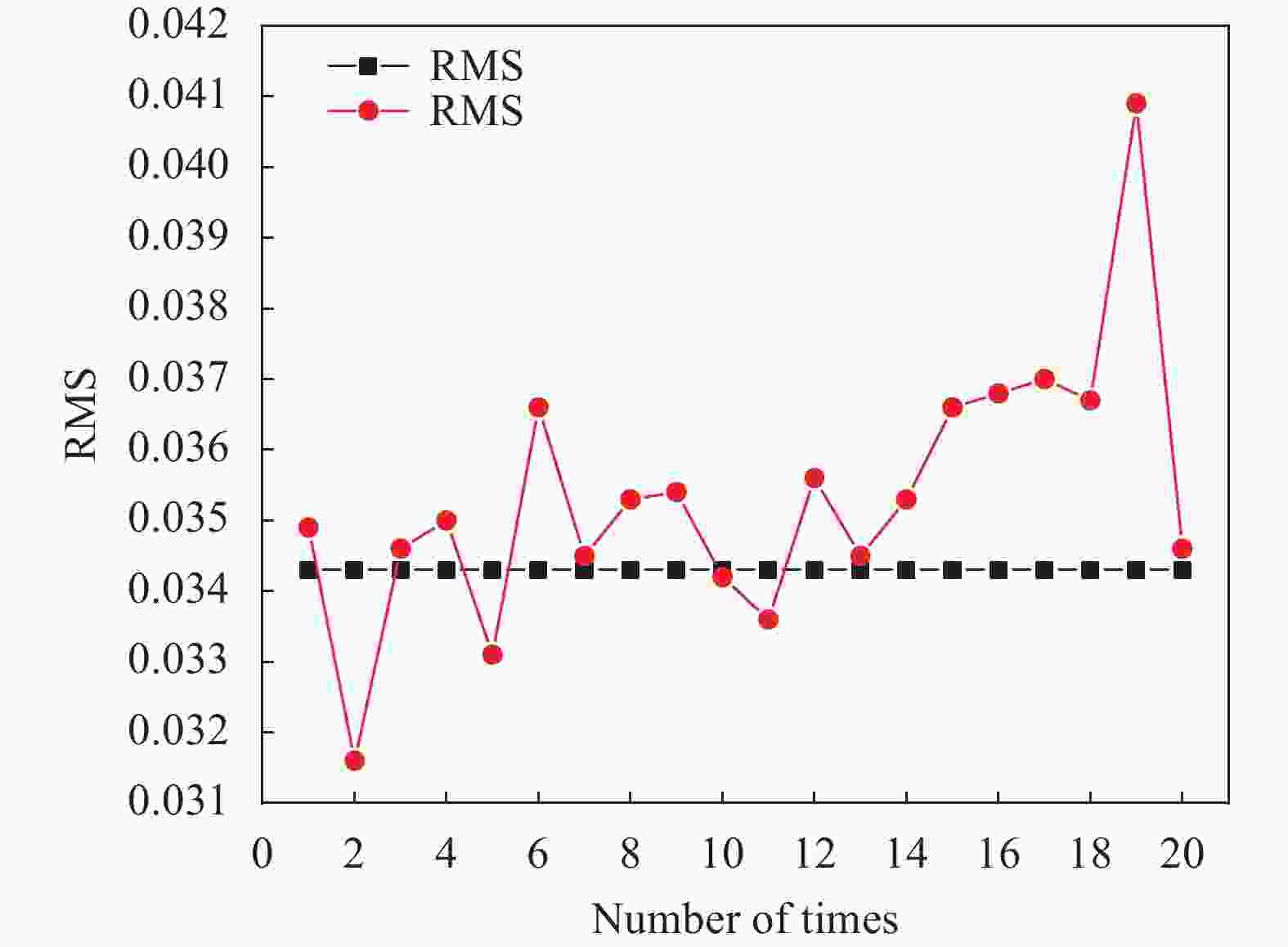
图 5 随机扰动恢复平面与标准平面对比
Figure 5. Comparison between the random disturbance recovery plane and the standard plane
从图中可以看到,每次扰动之后恢复出的平面面形的RMS与标准面形是有差异的,并且扰动强度不同影响大小不同,具有随机不可控性。对同一面形进行检测时,不同的气流扰动会使复算得到的面形与标准面形有所偏差,使得检测结果不准确,采用复算方法判断恢复面形的准确性。这里以最后两次气流扰动下大瑞奇角数据进行说明。其中在气流扰动下的大瑞奇角光瞳面系统波像差如图6所示,第19次W测量RMS为0.1110λ、PV为1.1316λ;第20次W测量RMS为0.0955λ、PV为0.7878λ。将带有气流扰动仿真得到平面镜的Zernike系数导入光学软件,得到W复算如图7所示,其中第19次W复算RMS为0.1050λ、PV为0.8877λ;第20次W复算RMS为0.0913λ、PV为0.5962λ,对比图6和图7可以发现第19次和20次大瑞奇角下仿真的W测量和复算W复算误差RMS分别为0.006λ和0.0042λ,复算与检测数据随气流变化的影响与图5中总体平面镜面形恢复结果受气流变化影响一致。
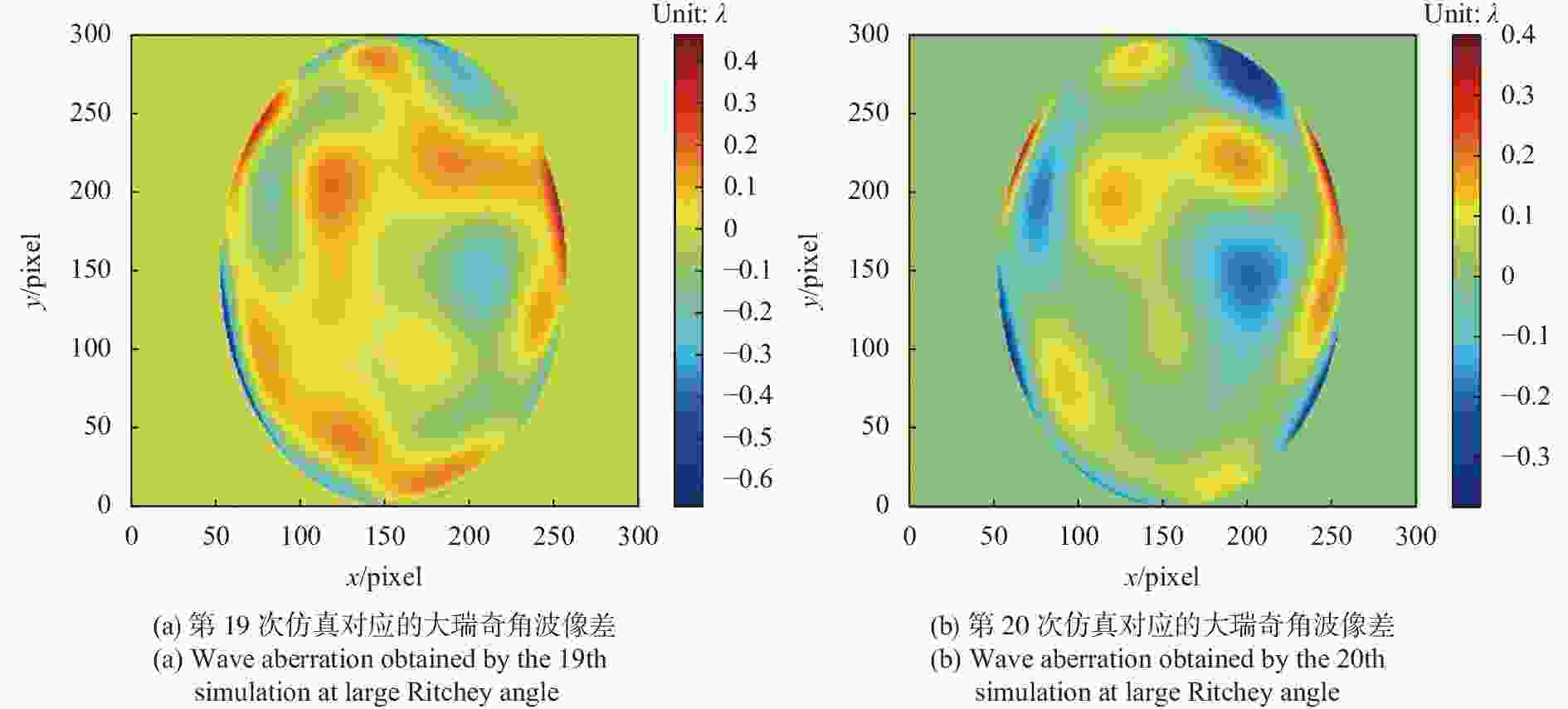
图 6 直接仿真得到的系统波像差分布图
Figure 6. Wave aberration distribution of system obtained by direct simulation
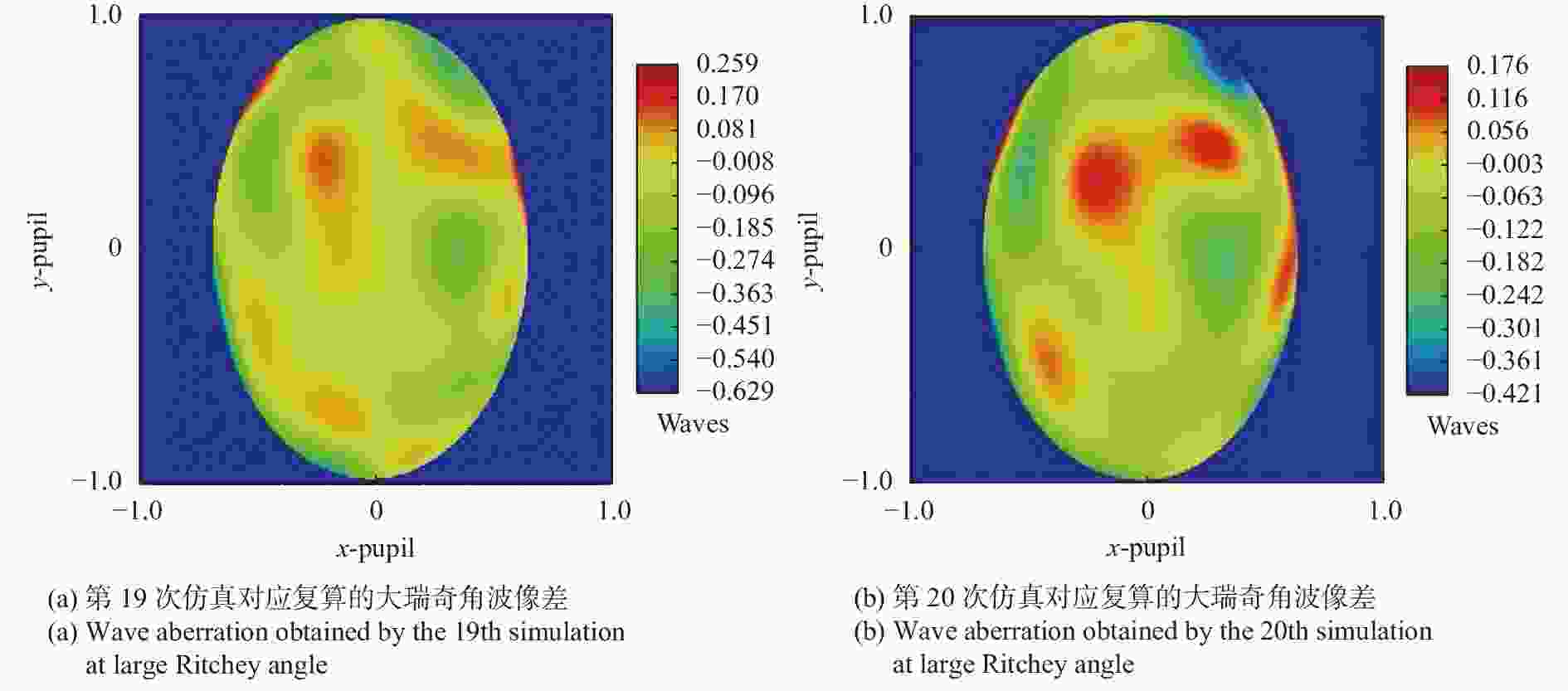
图 7 光学软件逆向复算获得的系统波像差分布图
Figure 7. Wave aberration distribution of system obtained by reverse calculation of optical software
此外,通过图6或者图7可知,可以对比两次以及多次W测量或者W复算,观察系统波像差分布情况,即可知道哪次测量时气流扰动误差较大,可以将该组舍去。最后,为了降低随机扰动误差的影响,采取统计学方法依次对测得的波像差进行平均,然后再拟合求解恢复的平面,将带有空气流扰动恢复出的平面与未加扰动的标准平面进行点对点像素相减,若两个平面完全一样则两个平面点对点相减后其面形的RMS应该为0,计算出的数值如表1所示。
表 1 对随机扰动平面进行平均计算
Table 1. Calculating the average of the randomly disturbed plane
Standard flat Average surface shape recovered from the first 5 disturbances Average surface shape recovered from the first 10 disturbances Average surface shape recovered from the first 15 disturbances Average surface shape recovered from the first 20 disturbances Solve the RMS of the surface 0.0343 0.0331 0.0341 0.0340 0.0344 RMS minus the pixels corresponding to the standard plane 0 0.0036 0.0031 0.0023 0.0019 不难发现,只对待测平面镜进行单次测量由于环境影响会导致测量数据与真实数据有所偏差,但其平面镜面形高低分布情况基本一致,只是对总体面形精度有影响;若采取在同一角度进行多次测量,对恢复的面形进行平均,其计算精度会有所提高,而且每一个像素点的面形分布情况与真实的面形更为接近。
-
南京天文仪器研制中心已经研制成功Φ2.7 m球面镜,此节直接使用Φ2.7 m球面镜面形数据仿真分析计算误差。球面镜面形RMS为0.02λ,PV为0.494λ如图8所示。将球面镜面形的Zernike系数导入上述光学软件仿真的光路中,得到带有球面镜误差的波像差数据;将得到的数据导入Matlab软件,用单位激励法对其Φ2 m平面镜面形进行恢复,将恢复的结果与3.1节标准平面镜结果像素点对应相减进行对比分析,结果如图9所示,其中RMS为0.0079λ,PV为0.0941λ。由于球面镜面形精度较高,对现阶段加工的平面镜测试结果误差较小,在实际测试中不用考虑球面镜误差。并且,在现场测试过程中,由于人为因素影响,不可能使得干涉仪中心、球面镜中心、与平面镜中心完全在主光线上,会存在一定的偏心或者倾斜,使点对点减去球面镜带来的误差不准确。所以在实际测量检测过程中,不考虑球面镜误差带来的影响。
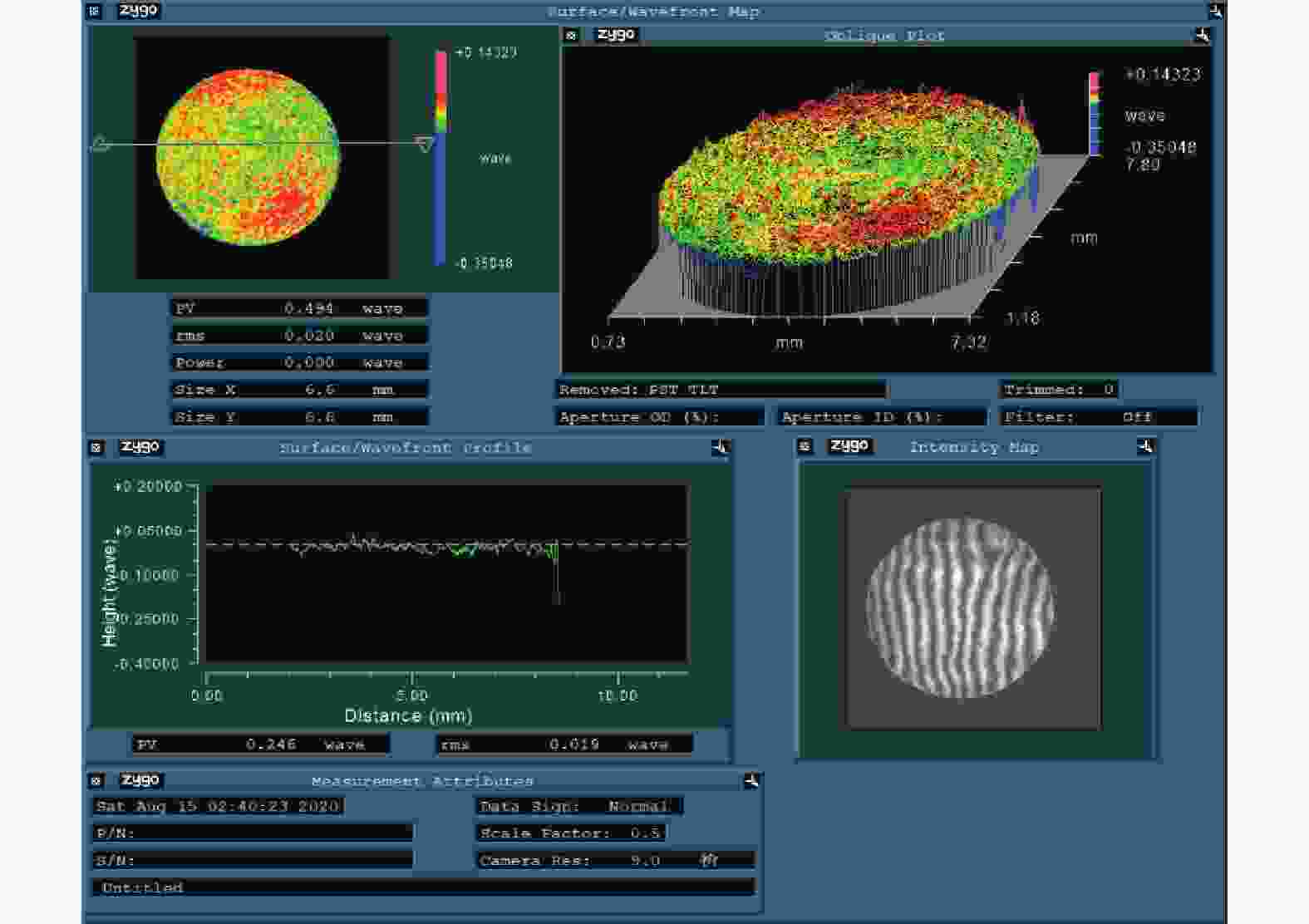
图 8 Φ2.7 m球面镜测试结果图
Figure 8. Test result diagram of Φ2.7 m spherical mirror
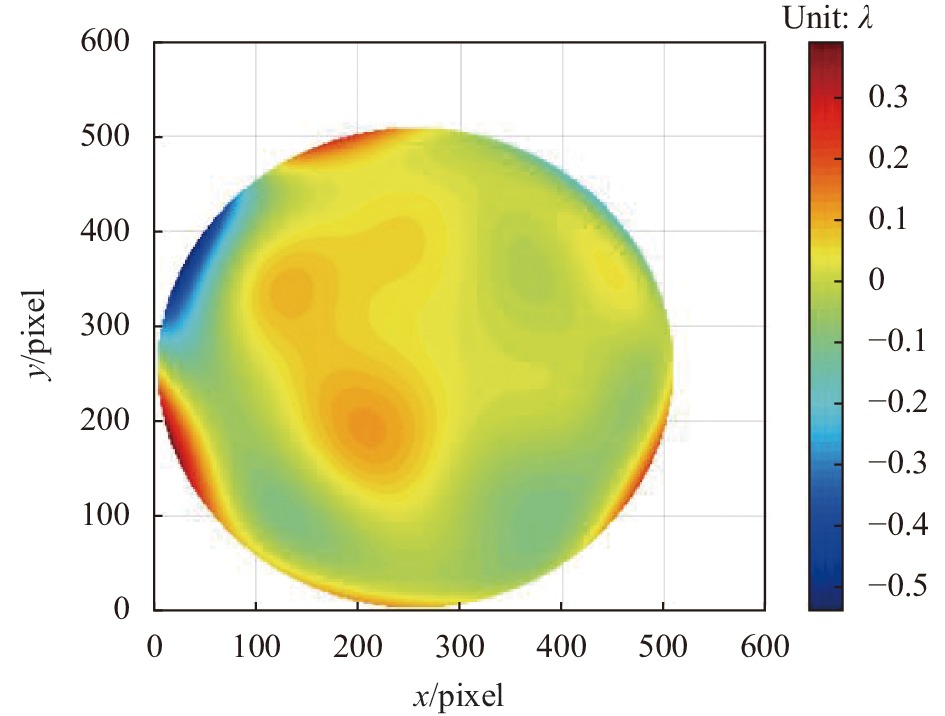
图 9 Φ2 m平面镜误差结果图
Figure 9. Result diagram of Φ2 m plane mirror error
-
其中采用瑞奇-康芒技术测试Φ2 m平面镜,整体测试示意图如图10所示。Φ2.7 m球面镜和Φ2 m平面镜背部结构采用重锤支撑方式。方便检测过程中调整球面镜和平面镜的倾斜和偏摆以获得不同瑞奇角下的检测结果,对Φ2.7 m球面镜和Φ2 m平面镜采用电机转轮进行调节。球面镜和平面镜整体示意图分别如图11(a)和(b)所示。

图 10 测试2 m平面镜示意图
Figure 10. Schematic diagram of testing 2 m flat mirror
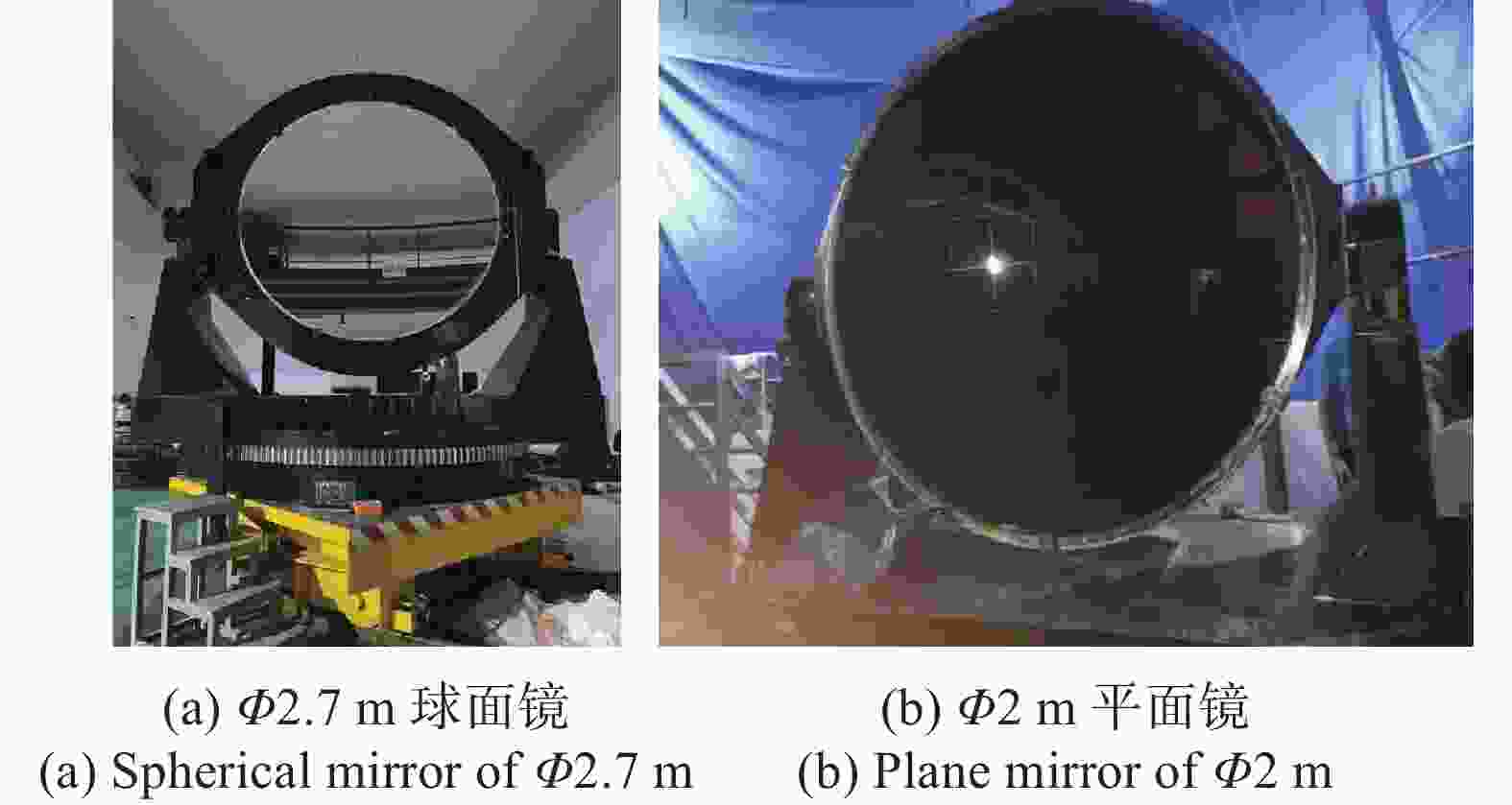
图 11 Φ2.7 m球面镜和Φ2 m平面镜示意图
Figure 11. Schematic diagrams of Φ2.7 m spherical mirror and Φ2 m plane mirror
对平面镜进行测试时,为了减小测量距离带来的误差,用激光跟踪仪代替卷尺测量平面镜中心到干涉仪焦点的距离d。为了减小测试光路中热气流的影响,在检测光路两边采用风扇顺着光路进行送风处理方式,以减小干涉条纹的抖动。选用稳定性较好的4D干涉仪对该平面镜进行检测,利用该检测系统中自带的mask对干涉条纹形成的光斑区域进行圈定,并对圈定的光斑进行计算以采集干涉条纹中携带的系统波像差数据。
-
为了及时了解正在加工的2 m平面镜面形,方便指导后续加工进展,截止到目前对2 m平面镜加工过程进行了面形跟踪测试。这里用前66项Zernike系数表示恢复出的被测2 m平面镜面形,其中面形变化情况如图12所示,从图中可以看到随着对平面镜加工,2 m平面镜面形的Zernike系数逐渐减小(尤其是power与0°像散项),面形越来越好,这里以第三次检测情况进行详细阐述。
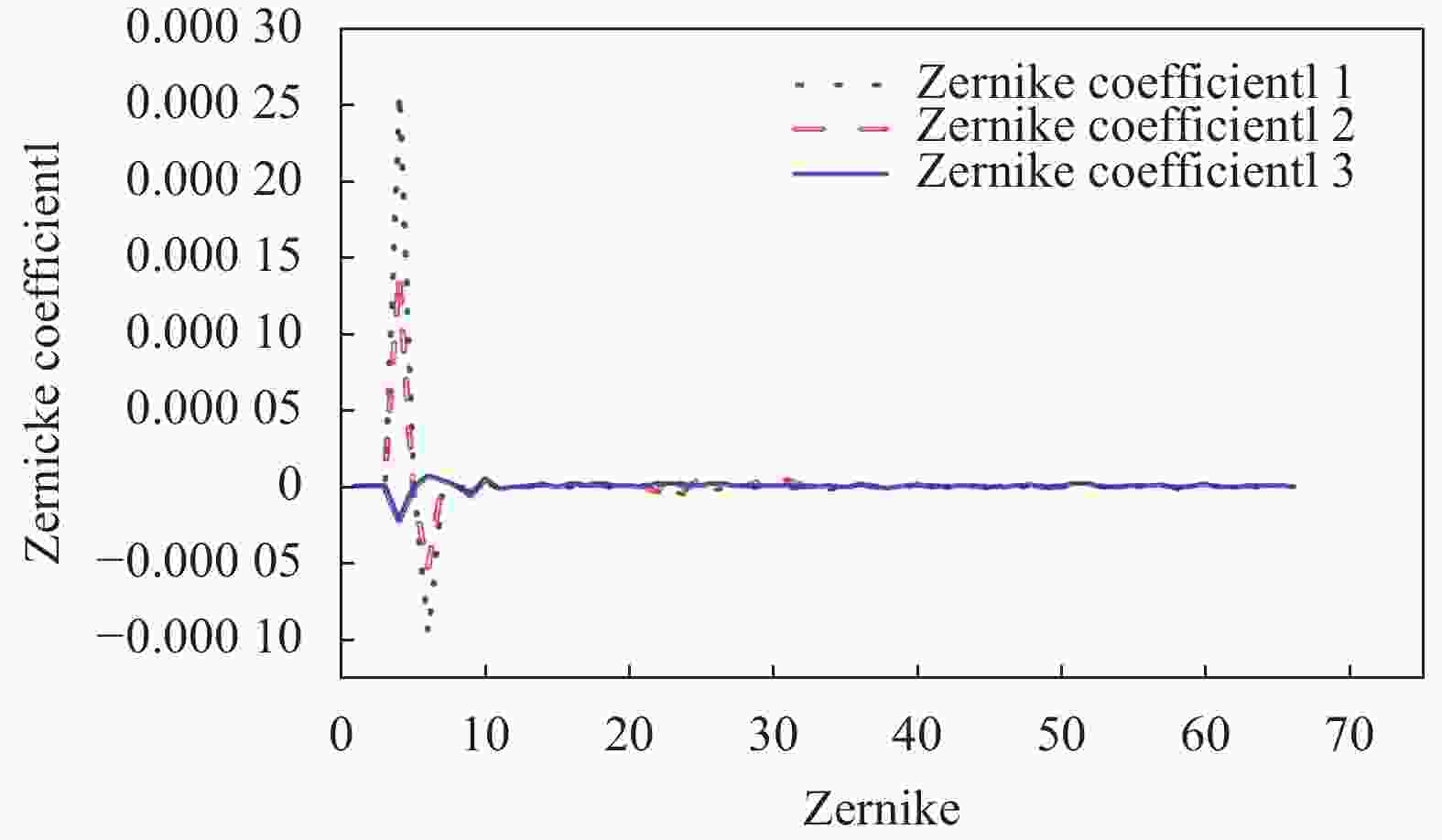
图 12 跟踪测试2 m平面镜面形Zernike系数变化情况
Figure 12. Track and test the change of Zernike coefficient of 2 m flat mirror shape
经激光跟踪仪测试结果显示,平面镜中心到干涉仪焦点的距离d为18175 mm,通过对检测获得的系统波像差图像计算压缩比获得瑞奇角。在瑞奇角分别为47.07°和29.33°下检测获得的W测量结果如图13(a)和(b)所示,其中47.07°下W测量RMS为0.0606λ、PV0.6873λ;29.33°下W测量RMS为0.0652λ、PV0.9074λ。将W测量和实验参数d、瑞奇角θ导入程序中进行平面镜面形恢复,计算结果如图14所示,平面镜的RMS为0.0415λ,PV为0.2040λ。
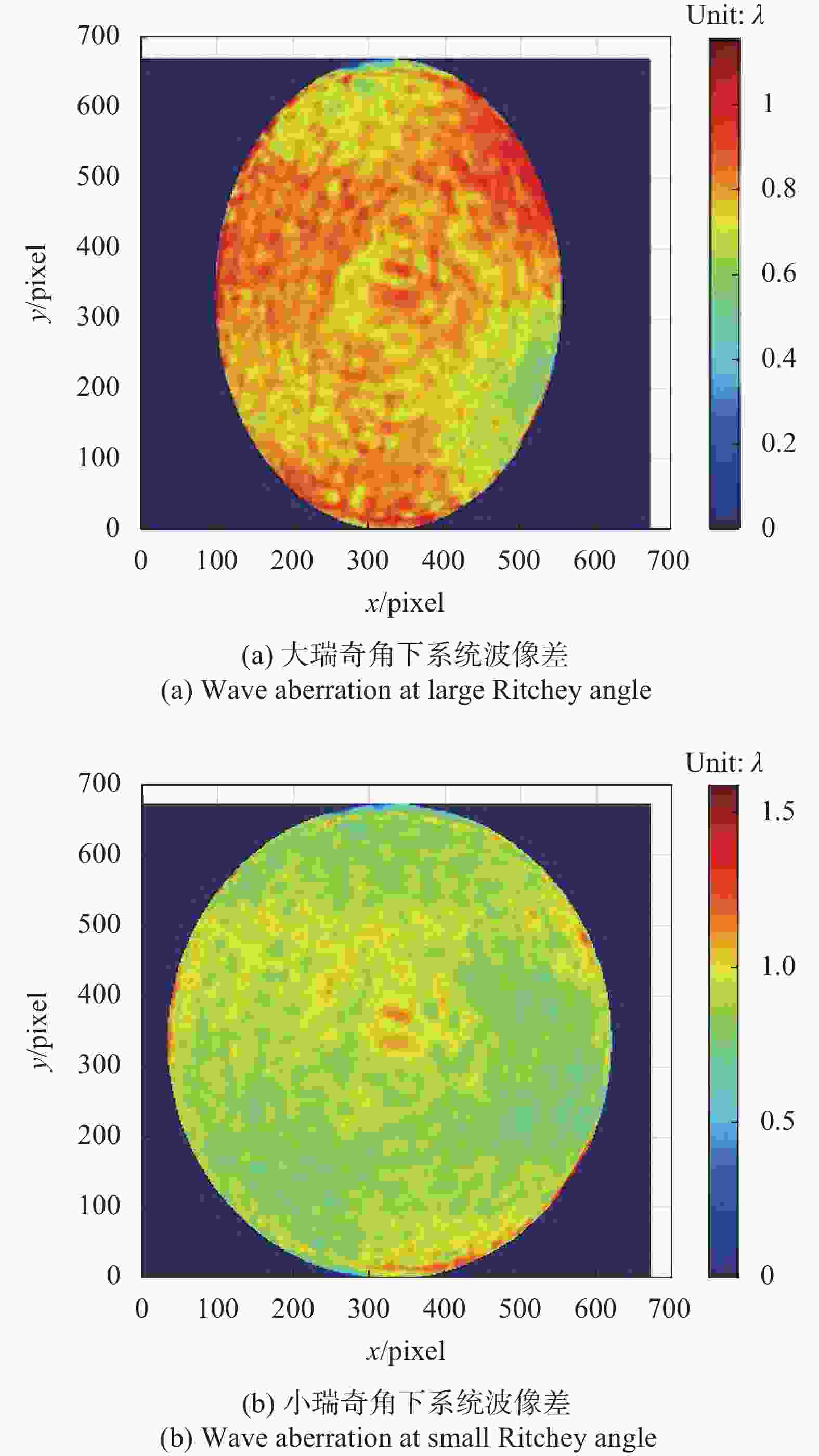
图 13 光瞳坐标系下的系统波像差
Figure 13. System wave aberration distribution in pupil coordinate system

图 14 恢复的平面面形
Figure 14. Restored plane shape
-
为了进一步验证程序对2 m平面镜面形恢复结果的正确性,现将恢复出的2 m平面镜面形的前66项Zernike系数导入光学设计软件中,设置与检测2 m平面镜相同的参数进行仿真模拟。分别得到在瑞奇角47.07°和29.33°下获得的系统波像差图,如图15(a)和(b)所示。47.07°下W复算的RMS值为0.0514λ、PV0.5910λ;29.33°下W复算的RMS值为0.0582λ、PV0.6162λ。
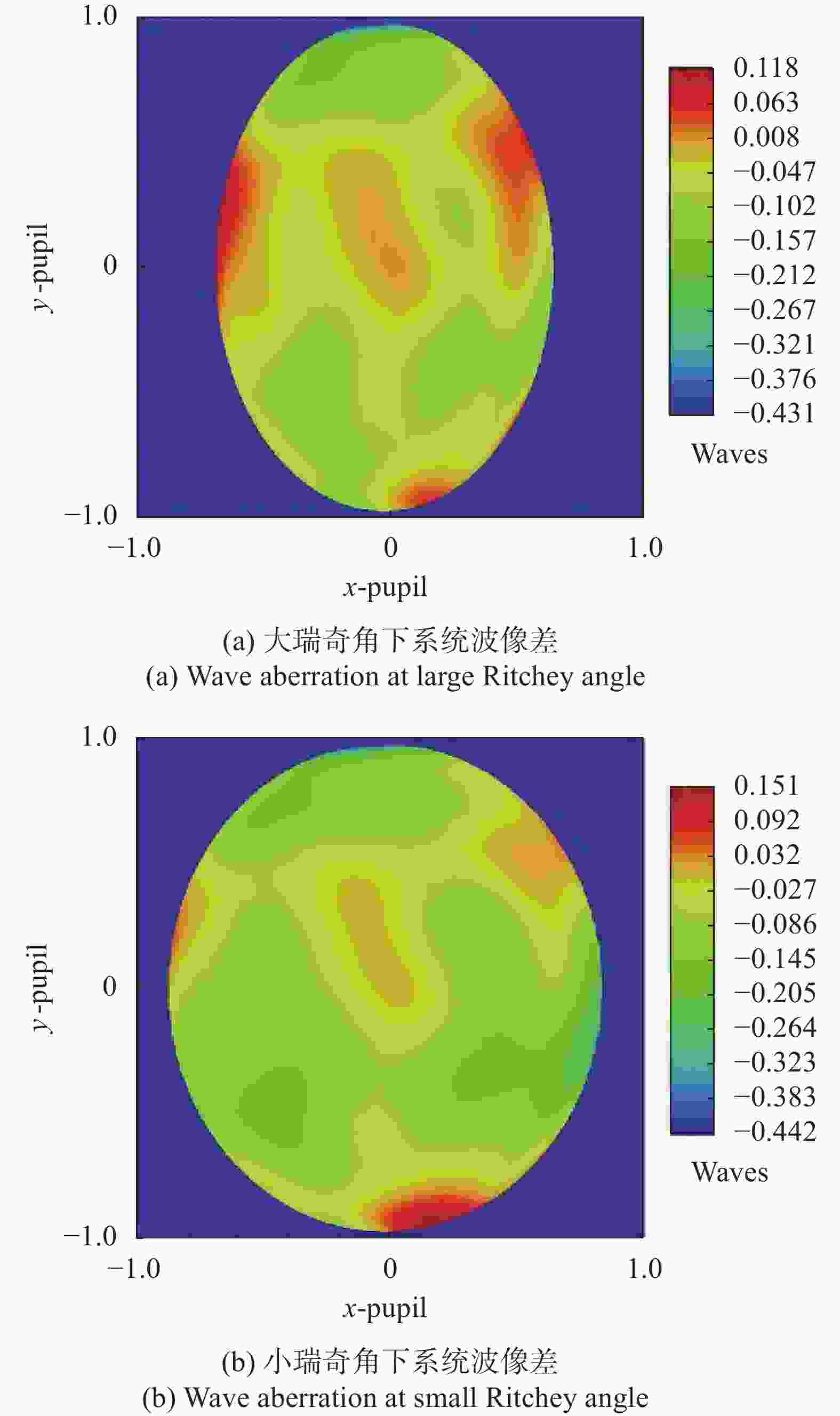
图 15 光学软件逆向复算获得的系统波像差分布图
Figure 15. Wave aberration distribution of system obtained by reverse calculation of optical software
与第3节逆向验证方法一样,将光学设计软件复算得到的W复算与现场检测得到的W测量进行对比分析。结果显示,47.07°下W测量的RMS为0.0606λ、PV0.6873λ,W复算的RMS为0.0514λ、PV0.5910λ;得到两者RMS误差为0.0092λ。同理,29.33°下W测量的RMS为0.0652λ、PV0.9074λ,W复算的RMS为0.0582λ、PV0.6162λ;得到两者RMS误差为0.0085λ。通过将W复算与W测量得到的波前图进行对比,可以发现整体光瞳波像差分布基本一致。
-
通过对比发现,在4.3节中现场检测与逆向复算获得的波像差图RMS差值比3.1节中理论仿真分析的要大;在4.3节中W测量与W复算波像差图局部存在偏差。经对比分析,认为导致检测结果比理论仿真误差较大的原因有如下:第一方面为随机误差,光学软件仿真光路是相对理想化的,实际检测过程中环境因素[11,13]如气流、温度、湿度等影响更加复杂,导致实际检测时局部不稳定;需要在检测过程中注意,尽可能在环境相对稳定状态下,进行多次测量,对数据进行平均计算减小环境因素带来的随机误差;第二方面为几何参数测量误差,实际测试过程中由于人为因素影响,不可能使得干涉仪中心、球面镜中心、与平面镜中心完全在主光线上,会存在一定的偏心或者倾斜,几何参数不能测定的非常准确使得测量存在偏差。对干涉仪光轴偏离平面镜几何中心的误差进行仿真分析,发现干涉仪光轴偏离平面镜几何中心约为口径尺寸的4%时,恢复出的平面与实际标准面形RMS偏差达到0.0048,如图16所示。随着偏心距离的增大,恢复出的平面镜面形误差更大,且W测量与W复算波像差图结果偏差很大。所以,需要检测过程中尽可能使干涉仪光斑对准平面镜中心。这些误差因素在现场实际检测2 m平面镜时,都会对其测量系统波像差结果以及恢复的平面镜面形造成影响;导致复算结果与测试结果局部存在偏差。文中采用逆向复算进行验证,就是为了评估测量是否受到较大的误差影响,以便帮助检测人员判断检测结果是否可靠。
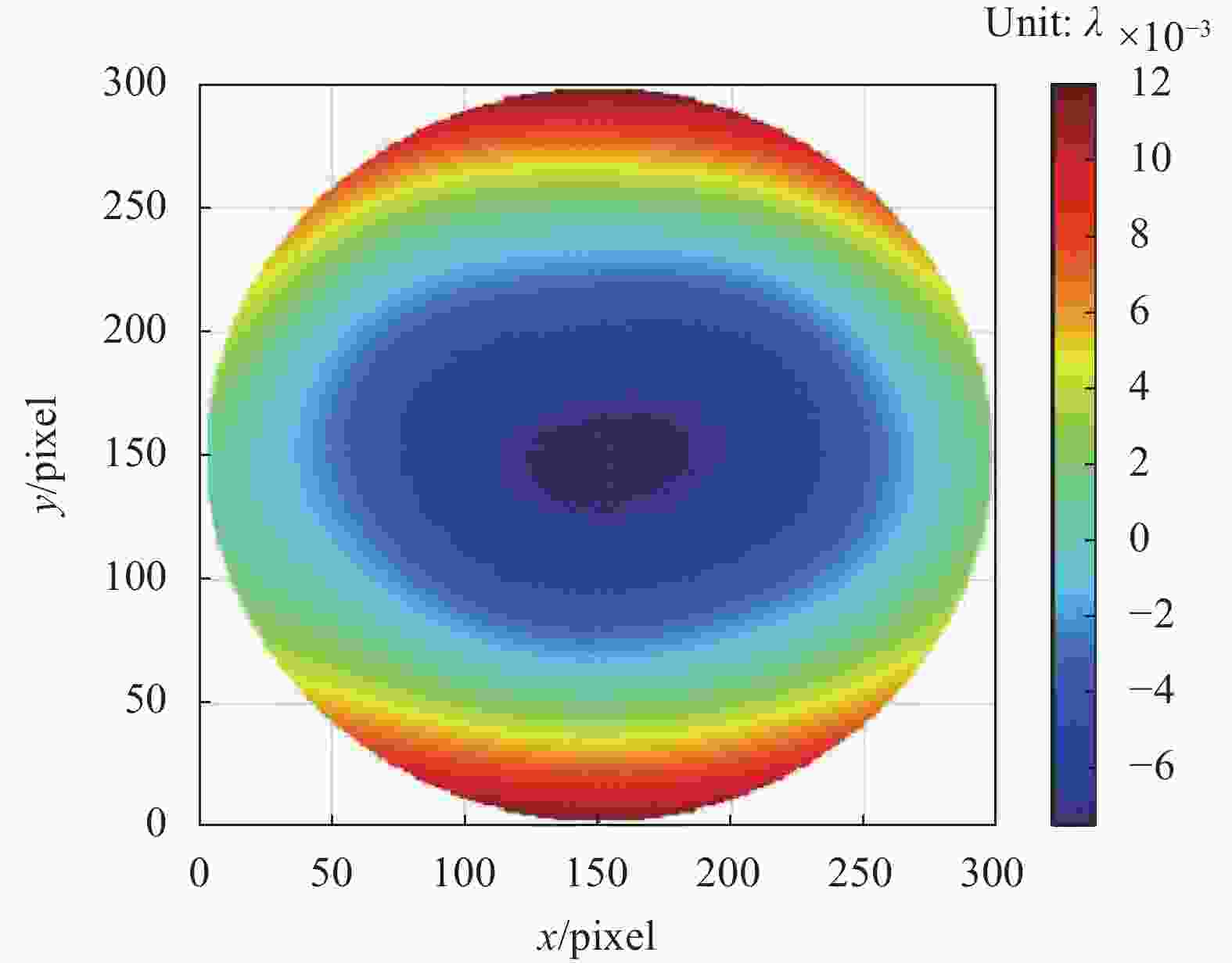
图 16 Φ2 m平面镜偏心误差结果图
Figure 16. Result diagram of Φ2 m plane mirror eccentricity error
由于该技术通用性强、检测精度较高,可用于生产检测更大口径的平面镜。然而,若检测更大口径平面镜需要满足以下条件:研制口径匹配的标准球面镜、构建相对稳定的检测环境、精准扣除球面镜误差等。
-
文中介绍了基于单位激励法与逆向复算的Φ2 m平面镜面形检测技术研究。采用软件仿真分析了气流扰动和球面镜误差对该方法的影响情况,并结合光学软件对结果进行逆向复算。结果显示在气流扰动情况下,经过多次平均计算面形误差可以保持在0.003λ;在球面镜面形影响情况下,面形计算精度达到0.0079λ。然后采用瑞奇-康芒检测技术对正在加工的2 m平面镜进行检测,并用该算法计算检测数据对其进行面形恢复;结果显示目前该2 m平面镜加工到的面形RMS为0.0415λ,PV为0.2040λ。最后用恢复结果导入光学设计软件进行逆向验证;这一过程形成了一个闭环检测与验证方法,这为大口径平面镜面形的检测与验证提供了一种新的思路,对实际大口径平面镜的生产、加工、与检验面形有着重要的应用意义。
2 m plane mirror measurement technology using unit excitation and reverse calculation
-
摘要: 为解决Φ2 m平面镜高精度面形检测问题,并提高瑞奇-康芒检测方法的可靠性,研究了一种基于单位激励法与逆向复算的Φ2 m平面镜面形检测技术。分析了在气流扰动、球面镜面形等误差源对单位激励面形计算方法的影响;采用单位激励与光学软件逆向复算相结合的方式,提高瑞奇康芒-检测方法的可靠性。仿真分析2 m平面镜检测过程中气流变化对面形恢复的影响,结果显示:在气流影响情况下,经过多次平均计算面形解算稳定性保持在0.003λ;在球面镜面形影响情况下,面形计算精度达到0.0079λ。采用这种方法,对实际Φ2 m平面镜进行面形加工过程控制,面形检测结果显示该平面镜的RMS达到0.0415λ,PV为0.2040λ(λ=632.8 nm)。该研究旨在解决误差影响情况下大口径平面镜面形检测问题,对于实际镜面加工、检测具有重要的应用意义。Abstract: In order to solve the problem of high-precision surface shape detection of Φ2 m plane mirror and improve the reliability of the Ricky-Common detection method, a Φ2 m plane mirror surface shape detection technology based on unit excitation method and inverse complex calculation was studied. The influence of error sources such as airflow disturbance and spherical mirror surface shape on the calculation method of unit excitation surface shape was analyzed. The combination of unit excitation and optical software inverse complex calculation was used to improve the reliability of the Ricky-Commonn detection method. The effect of airflow change on surface shape recovery during the detection of Φ2 m plane mirror was simulated and analyzed. The results show that under the influence of airflow, the stability of surface shape calculation remains at 0.003λ after multiple average calculations. The surface shape calculation the accuracy reaches 0.0079λ under the influence of spherical mirror shape. Using this method, the surface shape processing process of the actual Φ2 m plane mirror was controlled, and the surface shape detection results showed that the RMS of the plane mirror reached 0.0415λ, and the PV was 0.2040λ (λ=632.8 nm). The purpose of this research is to solve the problem of shape detection of large-diameter plane mirrors under the influence of errors, which has important application significance for actual mirror processing and detection.
-
Key words:
- Φ2 m plane mirror /
- Ricky-Common /
- influence matrix /
- unit excitation /
- reverse calculation
-
图 3 光瞳坐标系下系统波像差分布图
Figure 3. System wave aberration distribution in pupil coordinate system
图 4 光学软件逆向复算获得的系统波像差分布图
Figure 4. Wave aberration distribution of system obtained by reverse calculation of optical software
图 5 随机扰动恢复平面与标准平面对比
Figure 5. Comparison between the random disturbance recovery plane and the standard plane
图 6 直接仿真得到的系统波像差分布图
Figure 6. Wave aberration distribution of system obtained by direct simulation
图 7 光学软件逆向复算获得的系统波像差分布图
Figure 7. Wave aberration distribution of system obtained by reverse calculation of optical software
图 11 Φ2.7 m球面镜和Φ2 m平面镜示意图
Figure 11. Schematic diagrams of Φ2.7 m spherical mirror and Φ2 m plane mirror
图 12 跟踪测试2 m平面镜面形Zernike系数变化情况
Figure 12. Track and test the change of Zernike coefficient of 2 m flat mirror shape
图 13 光瞳坐标系下的系统波像差
Figure 13. System wave aberration distribution in pupil coordinate system
图 15 光学软件逆向复算获得的系统波像差分布图
Figure 15. Wave aberration distribution of system obtained by reverse calculation of optical software
表 1 对随机扰动平面进行平均计算
Table 1. Calculating the average of the randomly disturbed plane
Standard flat Average surface shape recovered from the first 5 disturbances Average surface shape recovered from the first 10 disturbances Average surface shape recovered from the first 15 disturbances Average surface shape recovered from the first 20 disturbances Solve the RMS of the surface 0.0343 0.0331 0.0341 0.0340 0.0344 RMS minus the pixels corresponding to the standard plane 0 0.0036 0.0031 0.0023 0.0019  下载: 导出CSV
下载: 导出CSV
-
[1] Zhu S, Zhang X H. Contrast research on data processing methods of ricky-common large aperture planar mirror surface [J]. Journal of Applied Optics, 2015, 36(5): 698-703. (in Chinese) doi: 10.5768/JAO201536.0501006 [2] Wang J, Wang X K, Hu H X, et al. Shack-hartmann scanning and stiching detection plane mirror [J]. Infrared and Laser Engineering, 2021, 50(10): 20210527. (in Chinese) [3] Zhu S, Zhang X H. Eliminating alignment error and analysizing ritchey angle accuracy in ritchey-common test [J]. Optics Communications, 2013, 311: 368-374. doi: 10.1016/j.optcom.2013.08.024 [4] Yan Lisong, Wang Xiaokun, Luo Xiao, et al. Sub-aperturestitching testing technology based on triangulation algorithm [J]. Infrared and Laser Engineering, 2013, 42(7): 1793-1797. (in Chinese) [5] Liu Y M, Li J P, Chen L, et al. Ritchey-common interferometry using unit-excitation influence matrix’s numerical calculation method [J]. Optics and Precision Engineering, 2018, 26(4): 771-777. (in Chinese) doi: 10.3788/OPE.20182604.0771 [6] 马志成. 大口径平面光学元件加工的工艺方法研究[D]. 长春: 中国科学院研究生院(长春光学精密机械与物理研究所), 2010. Ma Z C. The study on the methods of fabricating a large aperture flat [D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2010. (in Chinese) [7] 袁理. 1.5米口径平面镜面形检测与误差控制[D]. 中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2018. Yuan L. 1.5 m diameter flat mirror shape detection and error control [D]. Changchun: Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, 2010. (in Chinese) [8] An Qichang, Zhang Jingxu, Fei Yang, et al. Ritchey-common sparse-aperture testing of the giant steerable science mirror [J]. Applied Optics, 2018, 57(27): 7764-7769. doi: 10.1364/AO.57.007764 [9] Yuan L, Zhang X H. Surface shape measurement of large flat mirrors using a scanning pentaprism method [J]. Chinese Optics, 2019, 12(4): 922-932. (in Chinese) [10] 张宗. φ1.1 m平面镜的瑞奇-康芒检验方法研究[D]. 南京: 南京理工大学, 2012. Zhang Z. Research on ricky-common inspection method of φ1.1 m flat mirror [D]. Nanjing: Nanjing University of Science and Technology, 2012. (in Chinese) [11] Gao J J, Jao C J, Huang S, et al. Optimal design of a 2.7 m standard spherical inspection mirror support [J]. Chinese Optics, 2020, 13(4): 805-813. (in Chinese) doi: 10.37188/CO.2019-0225 [12] Lin D D, Hu M Y, Li J P, et al. Ricky-common test of local sampling of large aperture plane mirrors [J]. Laser & Optoelectronics Progress, 2018, 55(3): 031202. (in Chinese) [13] Xu S Y, Zhang X S, Fan K, et al. Suppression of air disturbance in wave front detection of large optical system [J]. Optics and Precision Engineering, 2020, 28(1): 80-89. (in Chinese) doi: 10.3788/OPE.20202801.0080 [14] Xuan B, Xie J J. An interpretation method of wave aberration in the ricky-common two-angle detection method [J]. Optical Technique, 2011, 37(3): 259-263. (in Chinese) -

 点击查看大图
点击查看大图

计量
- 文章访问数: 194
- HTML全文浏览量: 63
- PDF下载量: 49
- 被引次数: 0









