











-
随着各国军事武装的博弈愈发激烈,光电对抗技术在国防建设中起到至关重要的作用。光电对抗是通过激光以及其他装置,对敌方的光电设备进行干扰、侦察和打击[1]。电荷耦合器件 (Charge Coupled Devices, CCD)是光电对抗中获取图像信息的常用光电传感器件,相当于设备的眼睛,因此,在光电对抗作战中,对敌方CCD器件的主动探测、光学性能分析、损伤状态评估是有效实施光电对抗的前提[2-4]。
现有的研究主要以CCD损伤机理及评估依据为主,孙守红[5]等人介绍了CCD基本工作原理及激光对CCD的干扰损伤机理,为文中评估CCD状态的基础;张明鑫[6]等人建立了“猫眼”回波峰值功率与CCD损伤程度的变化关系,说明由回波峰值表示的回波强度可作为评估依据;秦绪志[7]等人研究了“猫眼”目标在线偏振光探测时回波散射偏振度的理论公式;陈世杰[8]等人验证了实验室环境下“猫眼”目标回波偏振度与目标表面粗糙度的关系,说明回波偏振度可作为评估依据;为实现远距离探测,胡玮娜[9]等人研究了外场环境下利用偏振成像实时探测“猫眼”目标回波的偏振特性,其与偏振度存在正比例关系,说明回波的偏振特性可作为评估依据。
目前,针对探测回波信息进行CCD损伤状态和损伤等级评估的研究较少,且实际评估时受复杂环境影响,单纯依靠强度或偏振度信息评估误差较大,部分CCD损伤状态与“猫眼”回波强度和偏振度的关系与上述研究不一致,存在复杂非线性关系。因此,通过多源信息融合的方式进行CCD损伤状态评估是有效的解决方案。多源信息融合技术[10-11]指的是对多种信息或数据源进行组合以得到最优估计的过程。目前,适合非线性关系的常用多源信息融合方法有K近邻、核-支持向量机和概率神经网络。K近邻 (K-Nearest Neighbor,KNN)[12]方法运算速度快,但有维数灾难问题;核-支持向量机(Kernel-Support Vector Machine,K-SVM)[13-14]方法交界处估计准确率高,不存在KNN的维数灾难,但KNN、K-SVM均存在环境复杂时容错性差的问题;概率神经网络(Probabilistic Neural Networks,PNN)[15-16]方法隐含层的径向基非线性映射函数容错性强,鲁棒性好,缺点是由于神经网络的复杂性,运算时间较长,且需要足够多的训练数据。
文中利用激光主动探测获取的“猫眼”回波强度信息、偏振度信息和已知的CCD损伤状态数据为输入,分别对上述三种方法进行了训练,通过对已训练模型进行测试获取CCD的损伤评价结果,选取准确率更高的方法作为以后的实际评估方法。首先,通过同时偏振成像装置,开展了808 nm连续激光对CCD表面反射回波的近距离、远距离探测实验;其次,结合两次实验数据,对三种方法进行了训练和测试;最后,对比了三种方法的测试效果,得到了一种适合不同场景的最佳评估方法。
文中正文主要由四部分构成:第一部分介绍了CCD损伤状态的理论评估依据、定义及其与粗糙度的关系,为评估方法提供理论支持;第二部分介绍了实验的硬件系统,近距离、远距离实验环境并分析了实验数据,为评估方法提供输入数据;第三部分介绍了理论的评估方法;第四部分进行了评估方法效果的分析,最终选择了PNN为综合环境的评估方法。
-
“猫眼”回波是根据光路可逆原理,当具有一定反射率的探测目标受到一束强激光照射时,能产生一个相对于其他漫反射目标较强的回波信号[17]。偏振成像技术能对同一被测物体在不同状态下的强度、偏振特性信息进行获取[9]。
回波强度(Echo Intensity,I)是描述回波功率的物理量,通常由“猫眼”回波功率表示强度,而功率计的强度信息需手动记录,利用偏振成像自动采集光斑,以光斑的总灰度值表示强度信息I。
回波偏振度(Echo Degree of Polarization,DOP)是描述回波偏振化程度的物理量,一般线偏振光的偏振度(Linear Degree of Polarization,LDOP)可表示为:
$$ LDOP = \frac{{{I_{{\text{max}}}} - {I_{\min }}}}{{{I_{{\text{max}}}} + {I_{\min }}}} $$ (1) 式中:
$ {I_{\min }} $ 和$ {I_{{\text{max}}}} $ 分别表示两个正交分量对应的最大光强和最小光强。假设探测光源为线偏振激光时,存在仅适用琼斯矢量的回波偏振特性参数偏振度(Degree of Polarization,DP)[9],由偏振成像的S回波和P回波的强度和与差的比值表示:$$ DP = \frac{{{I_{\text{P}}} - {I_{\text{S}}}}}{{{I_{\text{P}}} + {I_{\text{S}}}}} $$ (2) 式中:
${I_{\rm S}}$ 和${I_{\rm P}}$ 分别表示垂直方向、水平方向上振动的两正交光波的强度。现有研究表明光电探测器表面被损伤后,其表面材料粗糙度增大,回波偏振度减小[9]。故利用“猫眼”回波光斑作为偏振成像的图像输入,输出相应的强度信息和偏振特性作为激光损伤状态评估的依据。
CCD的基本单元是像素,其基本结构如图1(a)所示,由微透镜层、分色滤色片、遮光铝膜、SiO2绝缘层与硅基底构成。CCD永久失效的条件为损伤至硅基底层,在前期研究中发现[8],CCD损伤过程包括:点损伤、线损伤和面损伤,而只有达到面损伤后CCD的硅基底才能够暴露在表面,此时CCD达到完全损伤,文中把此状态下的CCD标记为“损伤”。CCD表面状态如图1(b)所示,图(b)中虚线区分探测区域;图1(c)中 Non1~6表示六处未损伤区域,依次对应图(b)实线的上半部分;Dam1~6表示六处损伤区域,依次对应图(b)实线的下半部分。
用白光干涉仪评估物体表面的粗糙度以验证文中的损伤评估,图1(d)、(e)为CCD的 三维形貌图像,图(d)为未损伤状态,图(e)为损伤状态,其中均方根偏差Sq是指被测物表面粗糙度偏离参考基准面的均方根。每种状态随机选择6个点测试均方根偏差,如表1所示,未损伤状态Sq值均小于损伤状态,说明了损伤的CCD表面粗糙度更高,而表面粗糙度会影响激光主动探测中“猫眼”回波的强度和偏振度数值,进而可根据“猫眼”回波信息对CCD是否被损伤进行评估[9]。

图 1 (a) CCD的基本结构; (b) CCD的损伤状态; (c) 标记区域,CCD的三维形貌图像;(d) 未损伤区域; (e) 损伤区域
Figure 1. (a) Basic structure of CCD; (b) Damage status of CCD; (c) Marked area, 3D topography image of CCD; (d) Undamaged area; (e) Damaged area
表 1 CCD表面的均方根参数Sq
Table 1. RMS parameter Sq of CCD surface
Group Undamaged area Sq/μm Damaged area Sq/μm 1 3.931 6.357 2 4.114 6.522 3 4.115 5.705 4 4.074 5.191 5 4.099 6.033 6 4.142 5.643 -
搭建了同时偏振成像光学系统平台,由发射系统和接收系统组成,其示意图如图2(a)所示。发射系统由808 nm连续激光器、衰减片、单透镜(直径为25.4 mm、焦距为35 mm)、和探测目标CCD芯片组成;接收系统由CMOS相机、镜头(焦距为70~300 mm)、宽带偏振分光棱镜(波长为620~1000 nm)以及计算机组成。

图 2 (a)同时偏振成像光学系统平台示意图;(b)实验场景、 系统装置;(c) 发射、接收系统;(d) 探测目标
Figure 2. (a) Schematic diagram of optical system platform for simultaneous polariztion imaging; (b) Experimental scene, system device (c) Transmitting and receiving system; (d) Detection system
激光器为属于线偏振光的808 nm连续激光器,其光束发散角小于3 mrad;相机为黑白COMS面阵相机,其探测器像素大小为 4.8 μm× 4.8 μm。附属设备为角锥棱镜;单透镜为猫眼回波光学成像系统的一部分,类似于猫眼的晶状体,入射光利用单透镜会聚至探测器;808 nm滤光片负责只接收808 nm的激光,避免环境光的干扰;探测目标为行间转移型硅基底面阵CCD芯片,其像元尺寸为9.8 μm (H)×6.3 μm (V),提前拆除了CCD封装玻璃以达到更好的实验效果。
-
实验环境由室内与室外两部分构成,如图2(b)所示,其中为避免接收端与探测目标之间受路人、车辆等影响,室内实验位于楼A一层楼道、室外实验位于近似等高且高于中间楼D的楼B、楼C楼层。实验距离分别为20 m近距离和140 m远距离,图2(b)为实验2的系统装置实物图,(c)为发射、接收系统,(d)为探测目标。
-
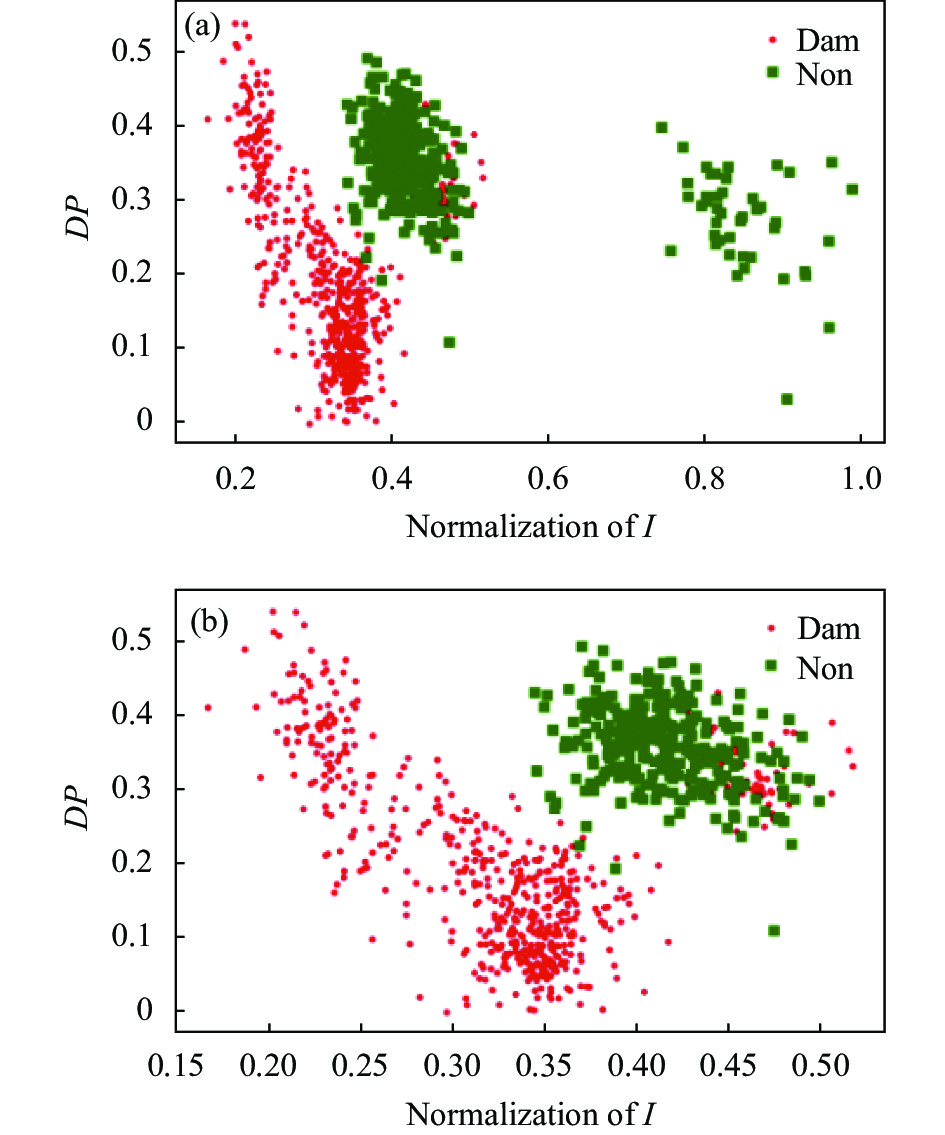
以远距离实验为例,共有945组数据,其中585组损伤点,360组未损伤点,如图3(a)所示,方形为未损伤点Non,圆形为损伤点Dam,X轴为归一化后的强度信息,Y轴为偏振度信息,由于CCD表面均匀的未损伤区域的强度信息应相近,部分未损伤点归一化强度在0.7~1之间 ,大于平均水平0.5,经分析其属于探测非CCD表面区域的情况,剔除该未损伤点的强度和偏振度信息,故未损伤点数据为315组。

图 3 CCD强度和偏振度。(a) 原始数据; (b) 处理数据
Figure 3. I and DP of CCD. (a) Raw data; (b) Processed data
因未损伤点与损伤点的数量一致,从上述的315组未损伤点任意选择270组以评估所有的损伤点,故共有1170组数据,其强度和偏振度分布如图3(b)所示,未损伤点的归一化强度为0.6~1,偏振度为0.3~0.5,损伤点的强度、偏振度分散。由于损伤点表面不均匀与实验环境复杂性,损伤点的强度信息存在较大差异,部分损伤点强度、偏振度与未损伤点接近。
综上所述,受实际激光对探测目标损伤状态的特征因素影响[17],如激光功率密度、探测目标材料、探测距离与环境等因素,无法单纯依靠强度或偏振度信息评估CCD的损伤状态,且同时依靠两者信息评估时与CCD损伤状态存在复杂非线性关系,故下面将对这一问题进行研究。
-
针对部分损伤点的强度或偏振度信息接近未损伤点,研究了三种适合非线性关系的机器学习方法对CCD表面状态进行评估,分别为KNN、K-SVM、PNN。
-
利用邻近点的类别预测类别。从训练集中找到和测试点最接近的K条记录,根据分类决策规则确定预测类别,本质为利用距离计算相似度,以距离度量、K值的选择及分类决策规则为基本因素构成方法。
特征空间中的两个实例点的距离是两个实例点相似程度的反映,常用的距离度量是欧氏距离。设特征空间X是n维实数的向量空间
$ {R_n} $ ,$ {{{x}}_i},{x_j} \in X $ ,${{x}}_{i}=({{x}}_{i}{}^{(1)}, {{x}}_{i}{}^{(2)},\cdots ,{{x}}_{i}{}^{(n)}{)}^{{\rm{T}}}$ ,${{x}}_{j}=({{x}}_{j}{}^{(1)}, {{x}}_{j}{}^{(2)},\cdots ,{{x}}_{j}{}^{(n)}{)}^{{\rm{T}}}$ ,$ {{{x}}_i} $ ,$ {{{x}}_j} $ 的闵可夫斯基距离为:$$ {L_p}({{{x}}_i},{x_j}) = {\left(\sum\limits_{l = 1}^n {{{\left| {{{{x}}_i}^{\left( l \right)} - {{{x}}_j}^{\left( l \right)}} \right|}^p}} \right)^{1/p}} $$ (3) 当p=2为欧几里得距离:
$$ {L_2}({{{x}}_i},{x_j}) = {\left(\sum\limits_{l = 1}^n {{{\left| {{{{x}}_i}^{\left( l \right)} - {{{x}}_j}^{\left( l \right)}} \right|}^2}} \right)^{1/2}} $$ (4) 根据“猫眼”回波强度、偏振度信息构成二维空间,计算测试点和训练点之间的直线距离,一般K值为一个比较小的数值,分类决策规则为多数投票法。
-
利用超平面预测类别,通过变换将原空间的数据映射到新空间,进而在新空间用线性分类器从训练数据中学习分类方法,以间隔最大化为原则对样本进行分割求得超平面,本质为求解凸二次规划问题,以核函数为基本因素构成方法。
特征空间中,令
$ \phi (x) $ 表示将x映射后的特征向量,由公式(5)表示划分超平面所对应的模型:$$ f(x) = {w^{\rm T}}\phi (x) + b $$ (5) 利用最小化函数求得超平面:
$$ \begin{gathered} \mathop {\min }\limits_{w,b} \frac{1}{2}{\left\| w \right\|^2}, \\ {\rm s.t.}\;{y_i}({w^{\rm T}}\phi ({x_i}) + b) \geqslant 1(i = 1,2, \cdots ,m) \\ \end{gathered} $$ (6) 其对偶问题为:
$$ \begin{gathered} \mathop {\max }\limits_\alpha \sum\limits_{i = 1}^m {{\alpha _i} - \frac{1}{2}\sum\limits_{i = 1}^m {\sum\limits_{j = 1}^m {{\alpha _i}{\alpha _j}} } } {y_i}{y_j}\phi {({x_i})^{\rm T}}\phi ({x_j}) \\ {\rm s.t.}\;\sum\limits_{i = 1}^m {{\alpha _i}} {y_i} = 0,{\alpha _i} \geqslant 0,i = 1,2,\cdots,m \\ \end{gathered} $$ (7) 式中:
$\phi {({x_i})^{\rm T}}\phi ({x_j})$ 为样本$ {x_i} $ 和$ {x_j} $ 映射到特征空间之后的内积,直接计算$\phi {({x_i})^{\rm T}}\phi ({x_j})$ 通常是困难的,故利用公式(8):$$ k({x_i},{x_j}) = \left\langle {\phi ({x_i}),\phi ({x_j})} \right\rangle = \phi {({x_i})^{\rm T}}\phi ({x_j}) $$ (8) 即
$ {x_i} $ 和$ {x_j} $ 在特征空间中的内积等于其在原始样本空间中通过$ k({x_i},{x_j}) $ 计算的函数值,故将公式(7)写成如下形式:$$ \begin{gathered} \mathop {\max }\limits_\alpha \sum\limits_{i = 1}^m {{\alpha _i} - \frac{1}{2}\sum\limits_{i = 1}^m {\sum\limits_{j = 1}^m {{\alpha _i}{\alpha _j}} } } {y_i}{y_j}k({x_i},{x_j}) \\ {\rm s.t.}\;\sum\limits_{i = 1}^m {{\alpha _i}} {y_i} = 0,{\alpha _i} \geqslant 0,i = 1,2,\cdots,m \\ \end{gathered} $$ (9) 求解后得到:
$$ \begin{split} f(x) = & {w^{\rm T}}\phi (x) + b = \sum\limits_{i = 1}^m {{\alpha _i}{y_i}\phi {{({x_i})}^{\rm T}}\phi ({x_j}) + b} =\\ & \sum\limits_{i = 1}^m {{\alpha _i}{y_i}k({x_i},{x_j}) + b} \\ \end{split} $$ (10) 利用“猫眼”回波强度、偏振度信息,其特征向量为
$ x = [{x_1},{x_2}] $ ,选择$ k({x_i},{x_j}) $ 为高斯核($ \sigma > 0 $ )的核函数:$$ k({x_i},{x_j}) = \exp \left( - \frac{{{{\left\| {{x_i} - {x_j}} \right\|}^2}}}{{2{\sigma ^2}}}\right) $$ (11) -
利用后验概率密度预测类别,以贝叶斯最小风险准则为基础,本质为最大后验概率,以径向基函数为基本因素构成方法。
概率神经网络由输入层、隐含层、求和层和输出层构成。其中,输入层为将特征向量
$ x = [{x_1},{x_2}, \cdots ,{x_n}] $ 传入网络,n表示特征的个数;隐含层通过连接权值与输入层连接,计算测试点与训练集中各点的相似度,并输出高斯函数值${\phi _{ij}}(x)$ ,由公式(12)定义:$$ {\phi _{ij}}(x) = \frac{1}{{{{(2\pi )}^{1/2}}{\sigma ^d}}}\exp \left( - \frac{{(x - {x_{ij}}){{(x - {x_{ij}})}^{\rm T}}}}{{{\sigma ^2}}}\right) $$ (12) 式中:i=1,2,···,M,M为训练样本中的总类数;d为样本空间数据的维数;
$ {x_{ij}} $ 为第i类样本的第j个中心。求和层连接各类的隐含层单元,对同类隐含层单元的输出做加权平均,即当i固定时,$$ {v_i} = {{\left(\sum\limits_{j = 1}^L {{\phi _{ij}}} \right)} \mathord{\left/ {\vphantom {{(\sum\limits_{j = 1}^L {{\varphi _{ij}}} )} L}} \right. } L} $$ (13) 式中:
$ {v_i} $ 为第i类类别的输出;L为第i类的神经元个数。根据贝叶斯最小风险准则中判定期望风险小的类别为输出类别,输出层为输出求和层中数值最大的类别:$$ y = \arg \max ({v_i}) $$ (14) 利用“猫眼”回波强度、偏振度信息,其特征向量为
$ x = [{x_1},{x_2}] $ ,选择高斯函数为径向基函数,其平滑因子$ \sigma $ 影响PNN性能,可根据不同场景选择错误率最低的$ \sigma $ 。 -
以前期数据存储为.txt文件为评估方法的输入,如表2所示,每行为一组数据,第1列为强度信息,第2列为偏振度信息,第3列为类别标签,其中1为损伤,2为未损伤。将随机选择数据的75%为训练集、25%为测试集分别输入KNN、K-SVM、PNN方法,并设置五个随机数,比较不同训练集和测试集对各方法的影响。
表 2 方法的输入数据格式
Table 2. Input data format of model
I DP Category label 309098 0.112896 1 320810 0.102260 1 284051 0.095712 1 296661 0.145772 1 291796 0.084086 1 387932 0.378391 2 370 913 0.316562 2 392 911 0.385240 2 396514 0.336255 2 396126 0.387806 2 -
利用KNN、K-SVM及PNN方法分别对近距离、远距离以及混合数据进行评估,其中KNN的K为3,K-SVM的核为高斯核,PNN的平滑因子
$ \sigma $ 为以固定步长寻找使得最低错误率在0~1数值之间,混合数据为近、远距离实验数据的组合以评估近、远距离环境的适应性。以远距离实验为例,共有五个随机选择的294组的测试集,其中第一个测试集的PNN的
$ \sigma $ 选择0.096,其过程如下:首先在0~1之间以0.1为间隔改变$ \sigma $ ,由表3可知,0~0.2之间存在更低错误率,进而在0~0.2之间依次以0.01、0.001为间隔继续寻找更低的错误率,当错误率无法降低时,选择当前的$ \sigma $ ,如图4所示,此时最低错误率为9.1837%,选择$ \sigma $ 为0.094。表 3 不同平滑因子
$ \sigma $ 的错误率Table 3. Error rates for different smoothing fators
$ \sigma $ Smoothing fator Error rate 0.1 9.8639% 0.2 23.1293% 0.3 42.8571% 0.4 44.5578% 0.5 44.5578% 
图 4 平滑因子
$ \sigma $ 与错误率的关系Figure 4. Relationship between smoothing fator
$ \sigma $ and error rate各方法的效果如图5所示,X轴为归一化的强度信息,Y轴为偏振度信息,正方形表示判断正确的未损伤状态位置,圆点表示判断正确的损伤状态位置,叉形表示判断错误的位置,叉形越多表示错误率越高,KNN、K-SVM、PNN依次有39、29、26个叉形,KNN中叉形最多,判断错误的数量最多,主要是将损伤区域判定为未损伤,K-SVM中判断错误的数量较少,交界处可较好评估,PNN中判断错误的数量最少,重叠部分可较好评估。

图 5 远距离各方法的预测效果。(a) KNN; (b) K-SVM;(c) PNN
Figure 5. Predition effect of long-distance outdoor models. (a) KNN; (b) K-SVM; (c) PNN
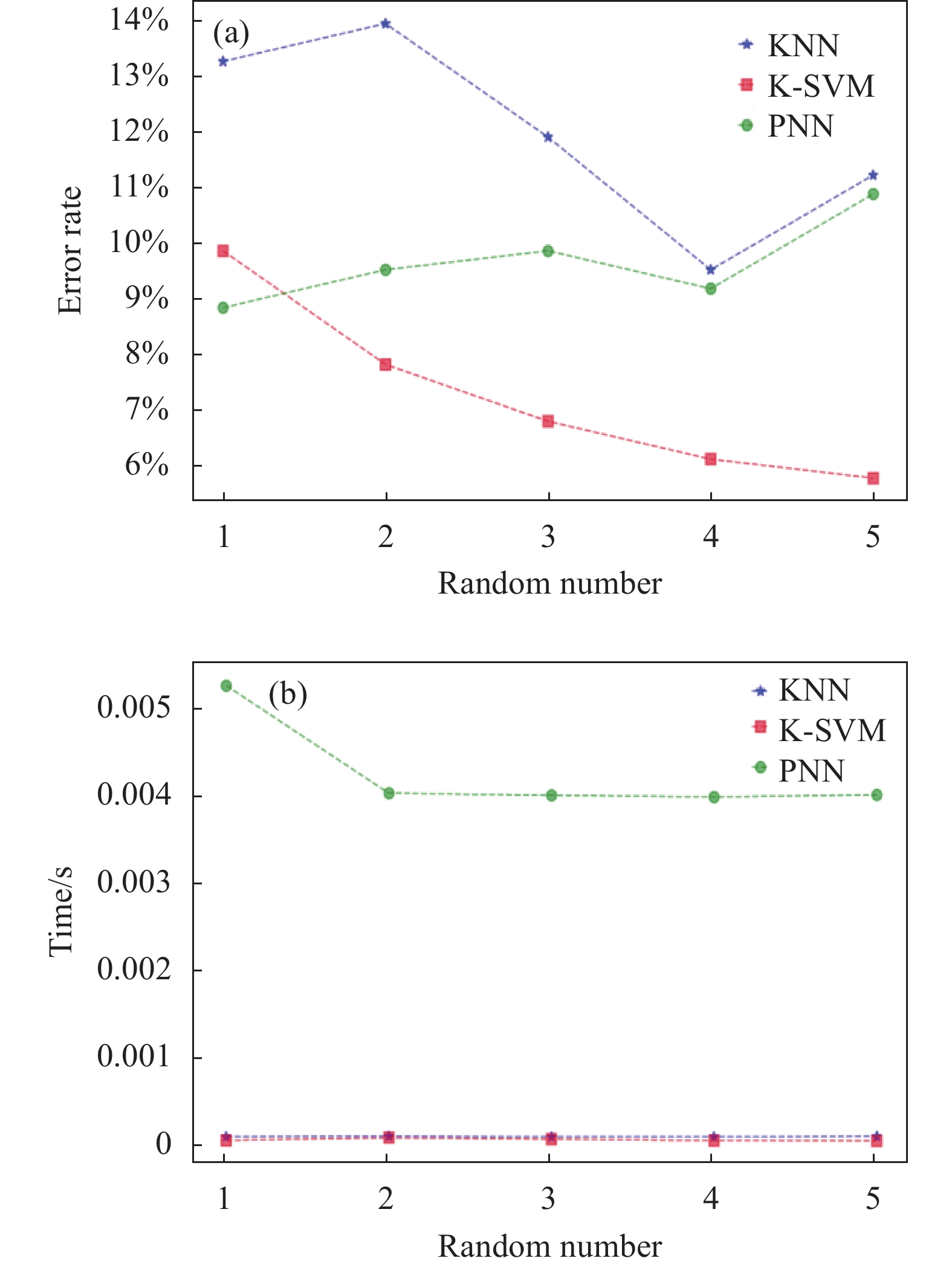
图6(a)、(b)分别为五个随机测试集的错误率、预测时间,X轴为随机数,星形为KNN,方形为K-SVM,圆形为PNN,KNN、K-SVM错误率波动范围均在4%,PNN错误率波动幅度为2%,测试集的选择对KNN、K-SVM影响较大,但不影响PNN的效果,其错误率较稳定。

图 6 不同随机数的远距离预测效果。(a)错误率; (b)预测时间
Figure 6. Long-distance predition effect of different random numbers. (a) Error rate; (b) Predition time
利用五次随机测试集结果的平均值比较不同场景的评估效果,近距离、远距离及混合数据的评估点错误数量、错误率、预测时间如表4所示。表4中各方法的近距离评估效果接近,错误率为2%~3%;远距离评估平均错误率为7%~12%,K-SVM平均错误率最低,预测时间短,但稳定性不好;混合数据评估平均错误率为10%~14%,PNN平均错误率最低,稳定性好,但预测时间约为其他方法的两倍。
表 4 不同数据的五次随机数平均值
Table 4. Average of five random numbers in different data
Different data Mehod Number of errors/PSC Error rate Predition time/ms Near-distance experiment KNN 5 2.13678% 0.081 K-SVM 6 2.73506% 0.101 PNN 5 2.13678% 0.169 Long-distance experiment KNN 35 11.9728% 0.044 K-SVM 21 7.27888% 0.067 PNN 28 9.65986% 0.161 Mixed data KNN 66 12.42424% 3.377 K-SVM 73 13.86364% 4.273 PNN 57 10.7197% 7.751 随着距离增加和环境变复杂,各方法的错误率不断增加,PNN比KNN、K-SVM的错误率低,鲁棒性好,缺点是由于神经网络的复杂性,运算时间较长,且需要足够多的训练数据;KNN的优点是运算时间短,缺点是环境复杂时容错性差;K-SVM的优点是交界处预测效果好,缺点是环境复杂时容错性差,且不稳定,故最终选择了PNN为评估方法。
-
利用同时偏振成像装置获取了CCD表面的“猫眼”回波强度信息、偏振度信息,实现了对强度和偏振度信息融合的三种适合非线性关系的方法,依次为KNN、K-SVM、PNN,对比了近、远距离实验的方法效果。研究结果表明,PNN方法综合评估效果优于其他两种方法,且在综合环境中稳定性最好。在应用中,PNN的参数平滑因子的最优值不容易选择,未来可考虑自适应方法进行优化。该研究成果是对激光损伤状态评估的一种探索,有利于提高对探测目标的评估能力以及系统的智能化程度,为非接触式的激光主动探测评估技术和提升武器系统的防御、打击能力提供新思路。
"Cat's eye" echo information assessment method of CCD damage status
-
摘要: CCD损伤状态与“猫眼”回波强度和偏振度为复杂非线性关系,无法单独根据强度或偏振度数值正确评估CCD损伤与否。结合多源信息融合技术与机器学习,利用适合非线性数据分类判别的KNN、K-SVM和PNN三种方法对CCD损伤状态评估方法进行研究。分别进行了近、远距离“猫眼”回波探测实验,以回波强度、偏振度信息和CCD实际损伤信息作为输入数据,分别对三种方法进行了训练,对比了训练的三种方法的评估测试结果,包括评估点的错误数量、错误率及评估时间,发现室外复杂环境时通过选择最优平滑因子
$ \sigma $ 的PNN方法错误率最低,在考虑实际评估允许时间范围内,PNN方法最适合用于基于“猫眼”回波信息的CCD损伤状态评估应用。Abstract:Objective Charge Coupled Devices (CCD) is a common photoelectric sensor for acquiring image information in photoelectric warfare. In photoelectric warfare, active detection, optical performance analysis and damage status assessment of enemy CCD device are the prerequisites for effective implementation of photoelectric warfare. At present, there are few studies on CCD damage status and damage grade assessment based on the detection echo information, and the actual assessment is affected by the complex environment. The CCD damage status has a complex nonlinear relationship with the "cat's eye" echo intensity and polarization degree which can’t correctly judge whether the CCD is damaged or not based on the intensity and polarization value alone. Therefore, it is considered to use multi-source information fusion method to carry out research on CCD damage status assessment, that is, combining the characteristic information of multiple CCD to obtain the optimal estimation. Methods Combined with multi-source information fusion technology and machine learning, three models of KNN, K-SVM and PNN suitable for nonlinear data classification and discrimination are used to study the assessment method of CCD damage status. Among the three assessment methods, the KNN method uses the category of the proximity point to predict the category, the K-SVM method uses the hyperplane to predict the category and the PNN method uses a posterior probability density to predict categories. Results and Discussions The near- and long-distance "cat's eye" echo detection experiments were carried out respectively, and the echo intensity, polarization degree information and CCD actual damage information were used as input data to train the three models respectively (Tab.3), and the assessments of the three models were compared including the number of errors in the assessment points, the error rate and the assessment time (Fig.5-6), which show that the error rates of KNN and K-SVM fluctuate within 4%, and the error rate of PNN fluctuates within 2% during the five random test sets. The selection of test sets has a great impact on the KNN and K-SVM, but the error rate of PNN is relatively stable which does not affect the PNN. The assessment effect of different scenarios is compared by using the average value of the results of five random test sets (Tab.4), and the near-distance experiment assessment effect is close, with the average error rate of 2%-3%; the average error rate of long-distance experiment assessment is 7%-12%, in which the average error rate is the lowest and prediction time is short, but the stability is not good as K-SVM; the average error rate of mixed data assessment is 10%-14%, in which PNN has the lowest average error rate and good stability, but the prediction time is about twice that of other methods. Conclusions PNN model with the optimal smoothing factor had the lowest error rate in the complex outdoor environment, considering the allowable time range of the actual assessment, the PNN model was most suitable for use based on application of CCD damage status assessment of "cat's eye" echo information. The PNN model has better comprehensive assessment effect than the other two methods and has the best stability in the comprehensive environment. The research results are an exploration of laser damage status assessment, which is conducive to improving the assessment ability of the detection target and the intelligent degree of the system, and provides a new idea for the non-contact laser active detection and assessment technology and improving the defense and strike ability of the weapon system. -
Key words:
- damage assessment /
- PNN /
- CCD /
- "cat's eye" effect /
- polarization characteristics
-
图 1 (a) CCD的基本结构; (b) CCD的损伤状态; (c) 标记区域,CCD的三维形貌图像;(d) 未损伤区域; (e) 损伤区域
Figure 1. (a) Basic structure of CCD; (b) Damage status of CCD; (c) Marked area, 3D topography image of CCD; (d) Undamaged area; (e) Damaged area
图 2 (a)同时偏振成像光学系统平台示意图;(b)实验场景、 系统装置;(c) 发射、接收系统;(d) 探测目标
Figure 2. (a) Schematic diagram of optical system platform for simultaneous polariztion imaging; (b) Experimental scene, system device (c) Transmitting and receiving system; (d) Detection system
图 3 CCD强度和偏振度。(a) 原始数据; (b) 处理数据
Figure 3. I and DP of CCD. (a) Raw data; (b) Processed data
图 4 平滑因子
$ \sigma $ 与错误率的关系Figure 4. Relationship between smoothing fator
$ \sigma $ and error rate
图 5 远距离各方法的预测效果。(a) KNN; (b) K-SVM;(c) PNN
Figure 5. Predition effect of long-distance outdoor models. (a) KNN; (b) K-SVM; (c) PNN
图 6 不同随机数的远距离预测效果。(a)错误率; (b)预测时间
Figure 6. Long-distance predition effect of different random numbers. (a) Error rate; (b) Predition time
表 1 CCD表面的均方根参数Sq
Table 1. RMS parameter Sq of CCD surface
Group Undamaged area Sq/μm Damaged area Sq/μm 1 3.931 6.357 2 4.114 6.522 3 4.115 5.705 4 4.074 5.191 5 4.099 6.033 6 4.142 5.643  下载: 导出CSV
下载: 导出CSV
表 2 方法的输入数据格式
Table 2. Input data format of model
I DP Category label 309098 0.112896 1 320810 0.102260 1 284051 0.095712 1 296661 0.145772 1 291796 0.084086 1 387932 0.378391 2 370 913 0.316562 2 392 911 0.385240 2 396514 0.336255 2 396126 0.387806 2
下载: 导出CSV
表 3 不同平滑因子
$ \sigma $ 的错误率Table 3. Error rates for different smoothing fators
$ \sigma $ Smoothing fator Error rate 0.1 9.8639% 0.2 23.1293% 0.3 42.8571% 0.4 44.5578% 0.5 44.5578%
下载: 导出CSV
表 4 不同数据的五次随机数平均值
Table 4. Average of five random numbers in different data
Different data Mehod Number of errors/PSC Error rate Predition time/ms Near-distance experiment KNN 5 2.13678% 0.081 K-SVM 6 2.73506% 0.101 PNN 5 2.13678% 0.169 Long-distance experiment KNN 35 11.9728% 0.044 K-SVM 21 7.27888% 0.067 PNN 28 9.65986% 0.161 Mixed data KNN 66 12.42424% 3.377 K-SVM 73 13.86364% 4.273 PNN 57 10.7197% 7.751
下载: 导出CSV
-
[1] Li Y Y, Guo L H, Xu W, et al. Generation of target track in hardware-in-loop simulation for photoelectric countermeasure [J]. Optics and Precision Engineering, 2010, 18(5): 1128-1134. (in Chinese) [2] Yang M Y. Detecting of photoelectric peeping devices based on active laser detection [J]. Chinese Optics, 2015, 8(2): 255-262. (in Chinese) doi: 10.3788/co.20150802.0255 [3] Liu Y, Xia R Q, Lü Y. Effectiveness evaluation system for anti cat’s eye detection technology using optoelectronic target [J]. Optics and Precision Engineering, 2019, 27(5): 1033-1038. (in Chinese) doi: 10.3788/OPE.20192705.1033 [4] Wang M, Wang T F, Shao J F. Analysis of femtosecond laser induced damage to array CCD camera [J]. Chinese Optics, 2013, 6(1): 96-102. (in Chinese) [5] Sun S H, Guo L H, Wang L J. Interference damage to visible light plane array CCD induced by 808 nm laser [J]. Journal of Changchun University of Science and Technology (Natural Science Edition), 2008, 31(1): 19-21. (in Chinese) [6] ZHang M X, Nie J S, Sun K, et al. Experimental study on laser cat's eye echoes from optical imaging system in the process of CCD damaging [J]. Acta Photonica Sinica, 2019, 48(3): 0314003. (in Chinese) [7] Qin X Z, Niu C H, Chen S J, et al. Analysis of polarization characteristics for cat's eye target echo scattering based on microfacet theory [J]. Journal of Applied Optics, 2020, 41(5): 916-923. (in Chinese) doi: 10.5768/JAO202041.0501007 [8] Chen S J, Niu C H, Li X Y, et al. Cat eye echo characteristics of optical imaging system in CCD damage process [J]. Infrared and Laser Engineering, 2021, 50(9): 20200425. (in Chinese) doi: 10.3788/IRLA20200425 [9] Hu W N, Lv Y, Geng R, et al. Photoelectric detector surface damage state polarization imaging type detection system [J]. Infrared and Laser Engineering, 2022, 51(6): 20210629. (in Chinese) doi: 10.3788/IRLA20210629 [10] 魏世杰. 基于多源信息融合的铣刀磨损评估方法研究[D]. 武汉理工大学, 2020. Wei S J. Research on wear assessment method of milling tool based on multi-source information fusion[D]. Wuhan: Wuhan University of Technology, 2020. (in Chinese) [11] Jusoh S, Almajali S. A systematic review on fusion techniques and approaches used in applications [J]. IEEE Access, 2020, 8: 14424-14439. doi: 10.1109/ACCESS.2020.2966400 [12] Li Y X, Zhou F C, Xu Z F, et al. Privacy-preserving k-nearest-neighbor search over mobile social network [J]. Chinese Journal of Computers, 2021, 44(7): 1481-1500. (in Chinese) doi: 10.11897/SP.J.1016.2021.01481 [13] 王晨阳. 基于数据驱动的心脏病分类诊断系统设计[D]. 西安电子科技大学, 2021. Wang C Y. Design of heart disease's classification and diagnosis system based on data-driven[D]. Xi’an: Xidian University, 2021. (in Chinese) [14] 代斌. 基于核参数优化的支持向量机在多分类问题中的应用研究[D]. 兰州交通大学, 2020. Dai B. Application research of support vector machine based on kernel parameter optimization in multi-classification problems[D]. Lanzhou: Lanzhou Jiaotong University, 2020. (in Chinese) [15] Dong H F, Zhang X H, Qiao C J. Fault diagnosis of transformer based on probabilistic neural network optimized by sparrow search algorithm [J]. Electric Engineering, 2022(4): 104-107. (in Chinese) doi: 10.19768/j.cnki.dgjs.2022.04.032 [16] Li J, Fan Y, He B. Research on Improved particle swarm optimization PNN neural network tool wear based on parameter strategy [J]. Machine Tool & Hydraulics, 2021, 49(3): 75-80,139. (in Chinese) [17] Du Y S, Dong W F, Luo Wi, et al. Analysis of laser active detection technique based on “cat's eye effect” [J]. Modern Defence Technology, 2018, 46(5): 88-93. (in Chinese) doi: 10.3969/j.issn.1009-086x.2018.05.14 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 145
- HTML全文浏览量: 37
- PDF下载量: 36
- 被引次数: 0
















































