



 下载:
下载:






-
激光雷达已广泛应用于海底测绘、水下搜救、水下目标跟踪、水下基础设施监测等领域。然而,当激光束在水中传播时,会同时被海水吸收和散射。使用蓝绿波长的光源可以最大限度地减少海水对光的吸收。但是,在浑浊的水中,海水对光的前向和后向散射是限制激光雷达系统性能的主要因素。通过距离选通的方法可以减少对后向散射光的接收[1],但前向散射光与目标反射光到达探测器的时间非常接近,因此,距离选通法很难抑制前向散射光的影响。前向散射不仅在时间上使脉冲展宽、降低测距精度,还会在空间上使光束发散,降低横向分辨率,因此,在激光雷达中抑制前向散射是十分重要的。Mullen等人提出可以使用载波强度调制技术来减少回波中的散射光对探测的干扰[2]。该方法利用的是目标和散射介质对强度调制激光有不同的频率响应,其中目标回波可以较好地保持强度调制信息,而散射杂波中的调制信息则会被平均。Pullen等人通过实验证明,海水的后向散射具有低通特性,即高频调制在后向散射中无法保持,那么如果以调制频率为中心频率对回波进行带通滤波,则探测的信噪比会得到提高,因此载波强度调制激光雷达可以有效地减少后向散射杂波对探测的影响[3-4]。Mullen的团队在真实海水中进行了载波调制水下激光雷达的测距实验,验证了该方法的有效性[5-7]。此后,载波调制激光雷达在水下激光探测和测距方面受到了越来越多的关注[8-11]。
目前,已经有了很多对后向散射光的频率响应及截止频率的研究。通常100 MHz的调制频率可以有效地抑制后向散射,在更加浑浊的介质中,截止频率则更高[12-13]。同理,载波强度调制方案也应该可以抑制前向散射,但需要的调制频率可能不同。但是,对后向散射光的分析相对容易,因为可以移开目标,让探测器只接收后向散射光而不接收信号光。然而,前向散射光在空间上与信号光交织在一起,难以分离。一些关于前向散射光的频率响应的研究实际上是测量整个海水通道的响应,其中不仅有前向散射光,还包括信号光[14-17]。Mullen等人在实验中把探测器从光轴上移开并以一定角度放置在光轴附近,避开了信号光,从而测量到了没有夹杂信号光的前向散射光的频率响应[18]。然而,散射在回波的中心最强,因此更需要研究的是分离回波中轴上的散射光与信号光,并分别测量他们的频率响应,以获得抑制回波中的前向散射光的截止频率。在激光雷达的设计中,不同浑浊程度的水质里回波中的前向散射光的频率响应是一个重要的参数,而目前缺乏此类研究。海水中的散射分为悬浮颗粒等大粒子引起的米散射和水分子等小粒子引起的瑞利散射[19]。在纯水和杂质稀少的环境中,通常只考虑瑞利散射;而在真实的含有各种杂质的海水中,应同时考虑瑞利散射和米散射。瑞利散射的前后方向基本对称,而米散射则方向性明显,前向散射远大于后向散射[20]。激光在海洋中传输的传输前向散射光强度远大于后向散射光强,前向散射一般占总散射的90%以上, 后向散射只占小部分[21]。这证明了在海水场中, 以前向散射为主的米散射起主要作用。海水中的散射分为悬浮颗粒等大粒子引起的米散射和水分子等小粒子引起的瑞利散射。在纯水和杂质稀少的环境中,通常只考虑瑞利散射;而在真实的含有各种杂质的海水中,应同时考虑瑞利散射和米散射。海水分子对光的散射为瑞利散射时,散射不具有明显的方向选择性;而激光在海水中传输时并不是各向同性的,其前向散射远大于后向散射。这主要是因为,海水中米散射占据主要地位,而米散射的散射角多数在−π/2~π/2之间。因此,海水中发生大量的前向散射。
涡旋光可以被用来分辨并分离散射光和目标回波[22-24],这是基于目标回波和散射光具有不同的空间相干性。其中目标回波具有较好的空间相干性,而散射光由不同路径和方向传播的光组成,因此,空间相干性较差,只有具有较好空间相干性的光才能被转换为涡旋光[25]。螺旋相位板就是一个常用的把高斯光束转换为涡旋光束的元件。螺旋相位板被放在回波光路中,其将目标回波转换为圆环形的涡旋光[26],但散射光不被转换,而是按照米散射规律传播,其强度分布是中心最强、四周减弱。因此,涡旋中心可以作为一个“窗口”来检测回波中的散射光,用在日冕仪中[27-29];该原理也可以用于在明亮的白天探测时去除雷达中太阳光背景的干扰[30],也与在非线性散射强噪声中放大提取信号类似[31]。在涡旋中心,没有信号光的分布,可以收集到纯粹的散射光。因此,利用螺旋相位板的窗口作用,可以测量水下激光雷达的前向散射杂波的频率响应。文中在接收端引入涡旋光,涡旋光的传播路径不长,用螺旋相位板转换即可。在未来的研究中,考虑在发射端引入涡旋光,此时涡旋光传播路径较长,生成传播更稳定的涡旋光束是需要考虑的[32]。此外,涡旋脉冲激光在液态介质中会产生奇特的OAM三阶非线性散射信号,这也是笔者在发射端引入涡旋光时需要注意的[33]。
文中分别测量了水下目标和浊水通道对强度调制的载波的频率响应。笔者在水下激光雷达的回波光路上放置了一个螺旋相位板,将散射光与目标反射光分开。涡旋中心的区域用于检测回波中的散射光,而涡旋圆环上的区域则用于检测目标反射光。对探测到的光分别做快速傅里叶变换快速傅里叶变换(Fast Fourier Transformations, FFT),从而得到了目标反射光和前向散射光的频谱。基于蒙特卡洛方法的仿真模拟表明,回波中的散射光具有低通特性,而目标回波具有平坦的频率响应。实验结果证实了理论上的预测。笔者将信号与散射的幅度之比定义为信杂比。调制频率越高,信杂比越高,尤其是在浑浊的水中。此外,介质越浑浊,则需要越高的调制频率,这使信杂比大于1。测距实验表明,在清水中,测距误差与调制频率关系不大;而在浑水中,高的调制频率可以减少测距误差,提高测距精度。
-
笔者使用蒙特卡洛方法来模拟浑浊介质中光的传播。假设入射光束为高斯分布,垂直发射到浑浊的介质中,然后追踪每个光子在浑浊介质中的传播路径。光子在两个连续的散射事件之间传播的路径长度由蒙特卡洛方法确定为$l=-\mathit{\rm ln}(\xi )/c$,其中,$ c $为衰减系数,$ \xi $为均匀分布在[0,1]区间内的随机变量。散射后光子传播的新方向由散射角$ \mathrm{\theta } $和相对于入射方向的方位角$ \mathrm{\phi } $定义。海水中的散射以米氏散射为主,而米散射通常用Henyey-Greenstein函数表示,散射角$ \mathrm{\theta } $被设置为一个符合Henyey-Greenstein相位函数的随机变量,方位角$ \mathrm{\phi } $则被设为一个均匀分布在[0,2π]区间内的随机变量。根据传播的路径长度和散射方向,光子从当前位置移动到下一个位置。同时,在每个散射事件中,光子的能量都会以$ \omega =b/c=b/(a+b) $的形式被衰减,其中$ b $是散射系数,$ a $是吸收系数,二者之和$ c $为衰减系数。笔者设定吸收系数为固定的0.1 m−1 [34],并通过改变散射系数来模拟不同浑浊程度的介质。
重复上述过程,直到光子到达边界,边界包括目标、海底和水面。为了与实验相比较,目标深度设定为1 m,海底深度为20 m,目标的反射率为0.8,海底的反射率为0.02。此外,光子到达海面的时候,需要考虑光的入射角,判断是全反射还是折射出水。用衰减长度来衡量光在水中传播的能力,它是衰减系数与距离的乘积。在文中,距离固定为1 m,只有衰减系数$ c $变化。
追踪每个光子的传播路径,直到光子的能量减少到小于预定的最小能量,或者当光子到达探测器或超出视场。设定最小能量为光子初始能量的10−9,探测器的直径为10 cm,视场角为1 rad。
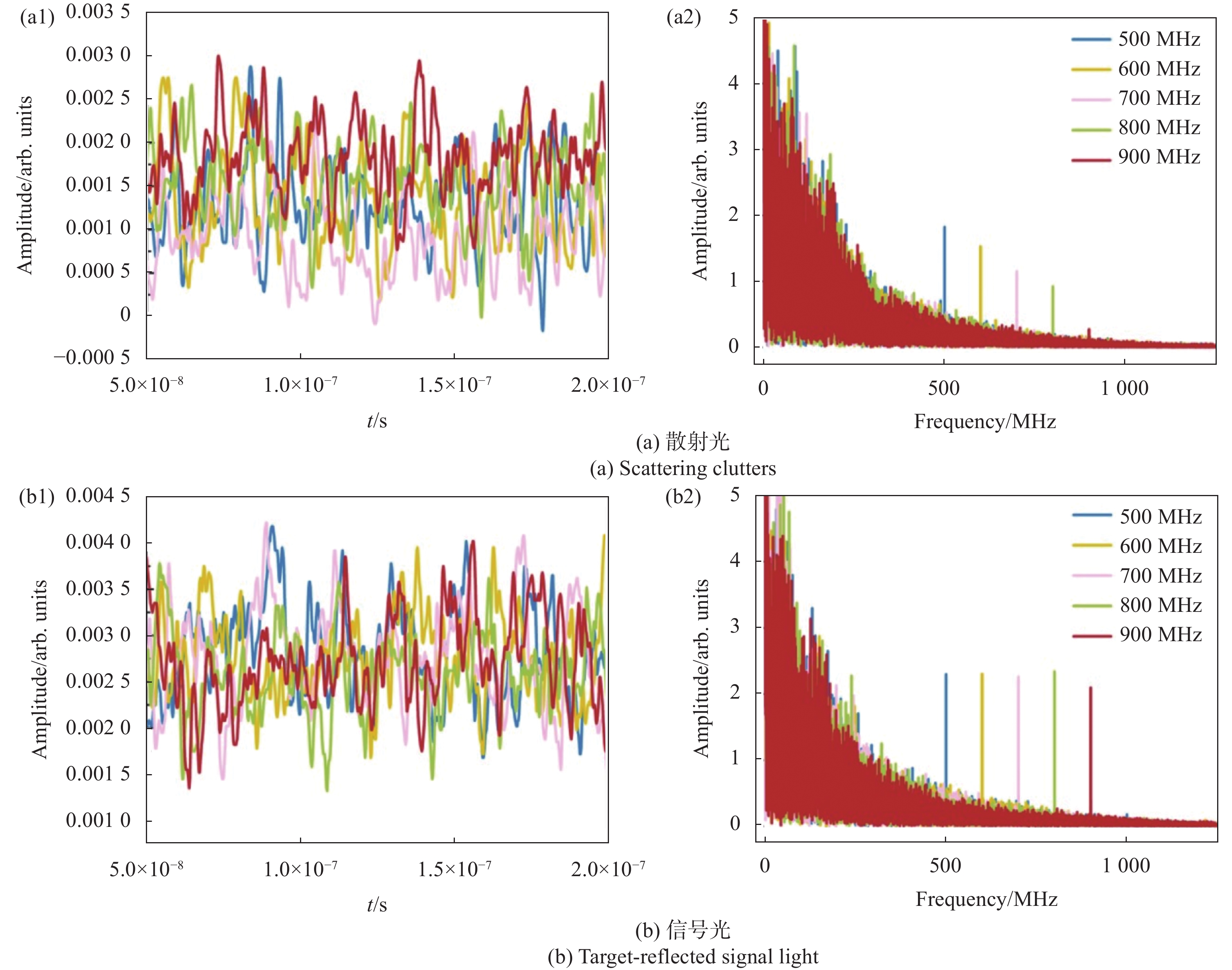
到达探测器的光子按照在浑浊介质中的碰撞次数分为散射光和目标反射的信号光。对探测到的散射光和信号光进行FFT以得到二者的频谱。图1(a)和(b)显示了当衰减长度为9时,不同调制频率下回波中的散射光和信号光的时域波形(图(a1)、(b1)) 和频谱(图(a2)、(b2))。从图1(a)可以看出,随着调制频率的增加,散射光频谱中的对于调制频率的响应变宽且减弱。然而,调制频率的变化对信号光在调制频率处的响应影响不大。

图 1 当衰减长度为9时,回波中的(a)散射光和(b)信号光的时域波形及相应的频谱
Figure 1. Time-domain signal and corresponding spectra of (a) scattering clutters in the echo and (b) target-reflected signal light when attenuation length is 9
改变水的衰减系数,计算回波中散射光和目标反射的信号光的频谱,并计算信杂比。图2显示了不同衰减长度下的信杂比与调制频率的关系。调制频率越大,信杂比越大。当衰减长度为11时,调制频率需要超过700 MHz才能使信杂比大于1;而当衰减长度为12时,调制频率需要超过900 MHz。

图 2 当衰减长度为11和12时信杂比与调制频率的关系
Figure 2. SCR versus modulation frequency under AL=11 and AL=12
-
实验装置如图3所示。532 nm激光光源最大输出功率为1 W[35]。光源发出的高斯光从水箱的玻璃窗口入射,水箱长度为3 m。目标被浸没在水中,距窗口1 m。受连续光激光器的功率限制,笔者选择镜面作为目标。发射端和接收端位于水箱的同一侧。

图 3 实验装置使用挡板(a)或者挡板(b)
Figure 3. Experimental setup with plate (a) or plate (b)
通过向水中添加Mg(OH)2粉末来改变水的衰减系数。水箱中放置一个循环泵,以确保Mg(OH)2颗粒在水中均匀分布。介质的衰减系数是通过测量光传播不同距离后的功率得到的,并根据比尔-朗伯定律计算$c=\mathit{\rm ln}({P}_{1}/{P}_{2})/({d}_{2}-{d}_{1})$。其中,$ {d}_{1} $和$ {d}_{2} $是光传播的距离,$ {P}_{1} $和$ {P}_{2} $是传播到相应距离后的光功率。为保证衰减长度值是准确的,在测距前、后分别测量衰减长度,取其平均值,而且尽量缩短数据的采集时间。
在接收端,放置了由两个透镜组成的倒置望远镜以缩小回波的光束宽度。螺旋相位板放置在透镜后面,作为空间滤波器:在回波中,目标反射的信号光具有较好的空间相干性,经过螺旋相位板后转化为涡旋光;而多次散射光失去了空间相干性,经过螺旋相位板后保持原有的强度分布状态,基于米散射理论,多次散射光的分布为中心强四周弱。探测回波中的散射杂波时,在螺旋相位板后放置一个只有中心为圆形透光区域的不透光挡板来遮住涡旋上和涡旋外的光,只接收涡旋圆环内的光,如图3中的挡板(a)所示。探测回波中的目标反射信号光时,在螺旋相位板后放置一个具有环形透光区域的不透光挡板只透过涡旋上的光,如图3中的挡板(b)所示。经过螺旋相位板后,回波中的信号光被转换到涡旋环上,而挡板上的透光圆环非常窄,只有少量的散射光通过,因此忽略涡旋环上的散射光,把分布在环上的光视为信号光。探测器为一个高速光电倍增管,探测器前使用一个532 nm的干涉滤光片滤除环境光。光电倍增管接收到的信号传输到数字示波器,然后进行FFT,从而得到探测光的频谱。
携带不同拓扑核的涡旋光束的环状半径不同,涡旋光束的拓扑荷数越大,其中心的暗区越大。在同一调制频率下,中心暗区越大的涡旋光束,涡旋中心的散射光就越多,在涡旋上残留的散射光就越少,但是涡旋上信号光的强度不变。因此,笔者测量散射光时,涡旋光束的拓扑荷数越大,测量得到的散射光子就越多。而测量信号光时,涡旋光束的拓扑荷数的大小对测量到的信号光光子数没有影响,其频谱的幅度也不变。因此,涡旋光束的拓扑荷数越大,计算的信杂比就越小,为此使用了购买的阶数最大的24阶螺旋相位板。
-
在不同的调制频率下分别测量回波中的信号光和散射光的频谱。图4(a)和(b)显示了分布在涡旋中心的散射光和分布在涡旋环上的信号光在不同调制频率下的时域波形(图(a1)、(b1))和频谱(图(a2)、(b2))。图中衰减长度为10。可以看出,在散射光的频谱中,在调制频率处的响应随着调制频率的增加而减少。然而,在信号光的频谱中,在调制频率处的响应并没有像散射光那样大的变化,这与模拟结果一致。这验证了散射对调制有平均的作用,高频成分在散射杂波中难以保持。反之,高频调制在信号光中得到了很好的保持。因此,通过在调制频率处滤波,可以抑制浑水中的前向散射。

图 4 当衰减长度为10时,回波中的(a)散射光和(b)信号光的时域波形及相应的频谱
Figure 4. Time-domain signal and corresponding spectra of (a) scattering clutters in the echo and (b) target-reflected signal light when AL=10
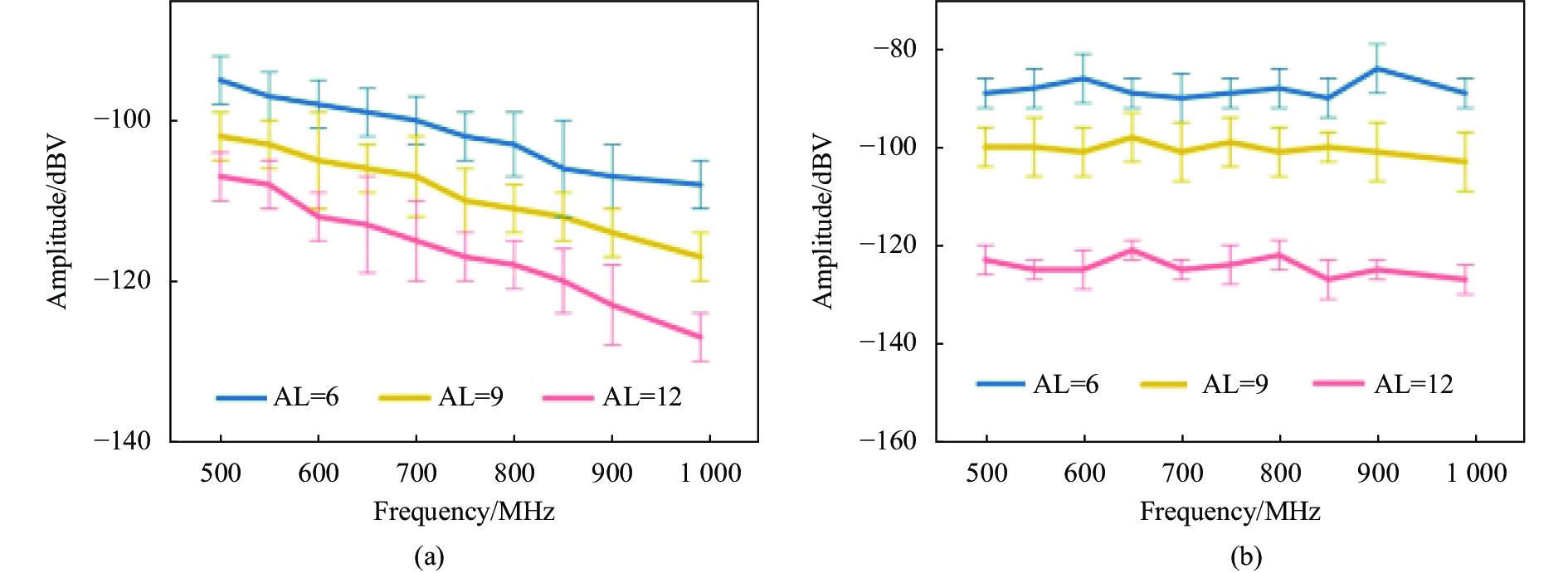
图5(a)和(b)为不同衰减长度下散射光和信号光的频谱,图5显示了散射光和信号光的频谱中,在调制频率处的响应幅度与调制频率的关系。可以看出,随着衰减长度的增加,散射光和信号光在调制频率处的响应的幅度都下降了。不同的是,散射光在不同衰减长度下都显示出低通特征,而信号光在不同衰减长度下都有更加平坦的响应。

图 5 在回波中的散射光(a)和信号光(b)的频谱中,在不同衰减长度下,调制频率的幅度与频率的关系
Figure 5. In the spectrum of the (a) scattering clutters in the echo and (b) target-reflected signal light, amplitude of modulation frequency versus the modulation frequency at different ALs
图6为当衰减长度为11和12时信杂比与调制频率的关系。调制频率越高,信杂比越高。此外,为了使信杂比达到1,在更浑浊的水中,所需调制频率更高。例如,当衰减长度为11时,信杂比为1,调制频率需要超过700 MHz;但当衰减长度为12时,调制频率需要900 MHz才能使信杂比达到1。

图 6 衰减长度为11和12时,信杂比与调制频率的关系
Figure 6. SCR versus modulation frequency under AL=11 and 12
-
笔者设计了测距实验以研究调制频率对测距准确度的影响。测距实验系统的设置与频率测量实验基本相同,只是在接收端不再放置螺旋相位板和挡板,如图7所示。同样的镜子作为目标被放置在水中,与窗口的距离为1 m,介质的衰减系数同样通过改变水中Mg(OH)2粉末的浓度来调整。此外,在测距实验中,信号发生器发送到调制器的信号被分出一路,作为参考信号,输入到示波器。光电倍增管接收到的回波信号同样输入到示波器。把回波信号与参考信号之间做互相关,从而获得目标的距离信息,目标的距离由互相关中的最大振幅的位置决定。镜子贴近水箱的玻璃窗口,此时的距离测量结果作为测距的原点。

图 7 测距实验装置
Figure 7. Ranging experimental setup
首先测量在清水中不同调制频率处得到的测距结果,如图8所示。可以看出,不同调制频率在清水中的测距结果在实际距离附近上下波动,与调制频率的大小关系不大。

图 8 清水中不同调制频率下的测距结果
Figure 8. Ranging results for different modulation frequencies in clean water
接下来,为了研究调制频率对测距准确度的影响,改变介质的衰减系数,测量不同调制频率下的测距结果。衰减长度为5、7、9、11时,调制频率约为300 MHz、450 MHz、550 MHz和700 MHz可使信杂比达到1。图9为测距误差与调制频率的关系。可以看出,衰减的增加会加大测距误差,而高的调制频率可以减少测距误差。这与前面的推测是一致的。当信杂比小于1时,提高调制频率,测距误差降低明显;而当调制频率高到足以使信杂比大于1时,继续提高调制频率,测距误差大致上会降低,但是变化不大。
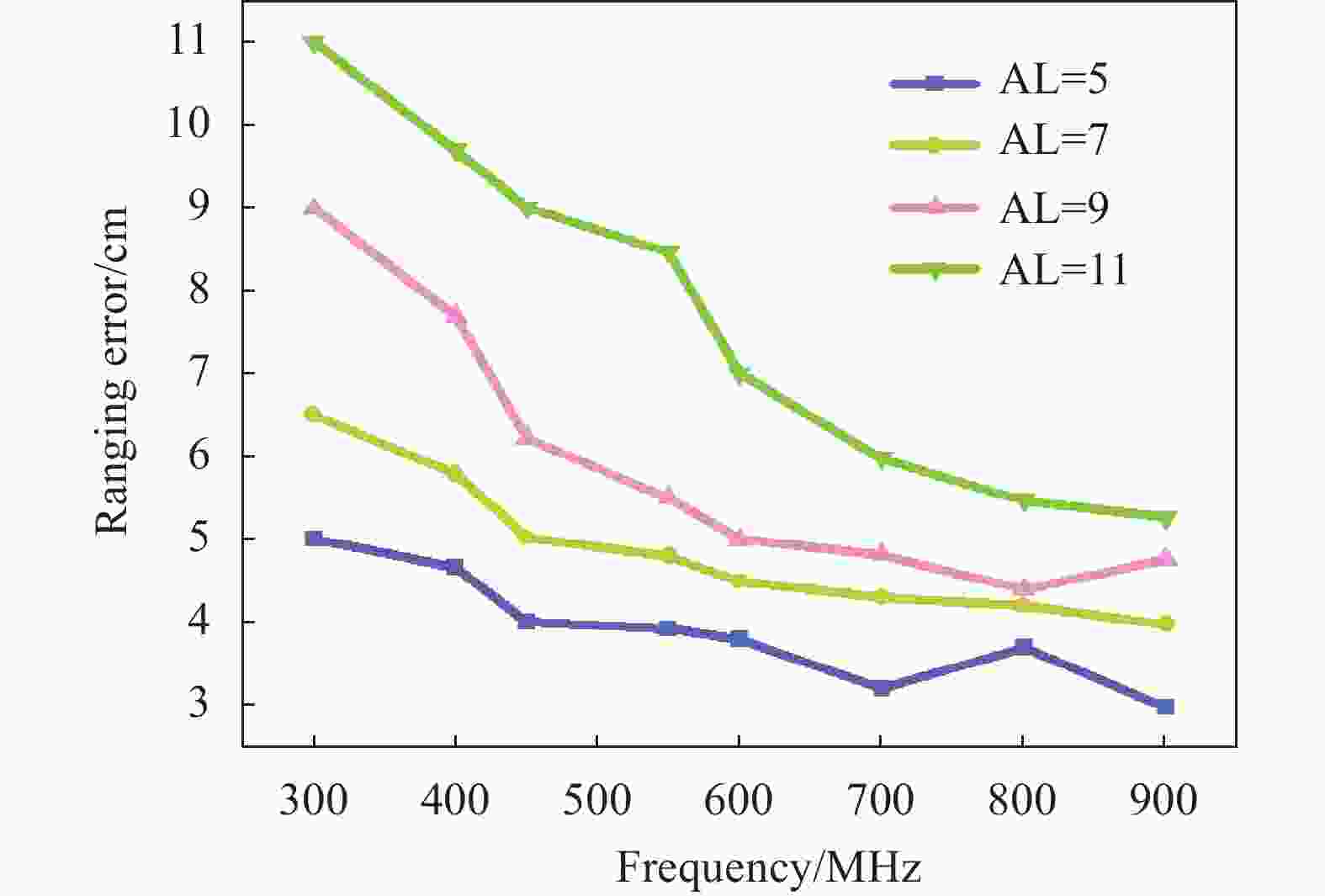
图 9 不同衰减长度时不同调制频率下的测距结果
Figure 9. Ranging results for different modulation frequencies in different ALs
-
笔者提出了一种分别测量水下目标和前向散射杂波对强度调制激光频率响应的方法。该方法基于涡旋光场的形成条件,通过使用螺旋相位板,利用信号光和散射光的空间相干性差异,将信号光和杂散光进行空间分离、滤波继而分别测量。实验与仿真的结果都表明,高的调制频率可以提高水下激光雷达系统的信杂比,对于浑浊水体,为了更有效地探测目标、抑制前向散射,所需调制频率更高。为了使信杂比大于1,当衰减长度为11时,调制频率需要大于700 MHz;而当衰减长度为12时,调制频率需要大于900 MHz。测距实验也证明,当调制频率不足以使信杂比大于1时,提高调制频率,测距误差降低明显;而当调制频率高到足以使信杂比大于1时,继续提高调制频率,测距误差大致上会降低,但是变化不大。文中研究的结论可以为载波调制水下激光雷达系统的设计提供参考。
Frequency-response measurement of forward scattering clutters in water by using vortex beams
-
摘要: 载波调制水下探测激光雷达利用散射光和信号光在频域特性上的差异来抑制杂散光,而不同水质中的散射光的截止频率是载波调制水下探测激光雷达设计中的重要参数。测量散射杂波的频率响应需要将目标回波与散射杂波分开,尤其是前向散射,与目标回波空间上重合,不容易被分开。文中提出了一种在载波强度调制激光雷达中分别测量水下目标和散射杂波的频率响应方法,利用散射光和目标反射的信号光在空间相干性上的差异,在回波光路上使用螺旋相位板将其分开并分别采集,再通过傅里叶变换得到它们的频谱。实验结果表明,前向散射杂波具有低通特性,而目标回波的响应是平坦的。将信号与散射在频谱中调制频率处的幅度之比定义为“信杂比”,并且用其来表示探测的有效性:当信杂比大于1时,认为探测到了目标。在较浑浊的水中,为了获得大于1的信杂比,载波的调制频率需要更高,基于蒙特卡洛方法对光子在海水中的传播进行了仿真模拟,结果与实验相符。测距实验也证明了,提高调制频率可以减小浑浊水中的测距误差。当信杂比小于1时,提高调制频率,测距误差降低明显。Abstract:
Objective Lidar is widely used in underwater detection. However, laser is scattered during underwater propagation, and scattering is an important factor limiting the performance of radar systems. Lidar-radar techniques can suppress both forward and backward scattering, where the cut-off frequency of the scattered light is an important parameter. However, unlike backscattering which is easily separated from the target-reflected light in space, forward scattering is difficult to separate from the target-reflected light as they are intertwined in space. Therefore, we propose to separate the forward scattered light from the target-reflected light using vortex beams and analyze its frequency response to obtain the cut-off frequency of forward scattered light. Methods Vortex beams are used to distinguish between forward scattered light and target-reflected light in underwater target detection (Fig.3). The fast Fourier transform is done on the spatially filtered forward scattered light and the target-reflected light to obtain their frequency response (Fig.4). A Monte Carlo-based model for lidar-radar underwater target detection is also developed, and the fast Fourier transform of the forward scattered and reflected light in the echoes is also performed to analyze their frequency response (Fig.1). The simulation results are compared with the experimental results (Fig.2, Fig.6). A ranging experiment is designed to investigate the effect of modulation frequencies less than or greater than the cut-off frequency of forward scattering on the accuracy of ranging (Fig.7). Results and Discussions The experimental results show that scattering has an averaging effect on the modulation, and the high-frequency component is difficult to be maintained in the forward scattering. On the contrary, the high frequency modulation is well maintained in the signal light (Fig.4). The higher the modulation frequency is, the higher the signal-to-clutter ratio is. In addition, in order to achieve a signal-to-clutter ratio of 1, higher modulation frequencies are required in more turbid water (Fig.6). The experimental results are consistent with the results of Monte Carlo simulations (Fig.2). The results of the ranging experiments show that when the signal-to-clutter ratio is less than 1, increasing the modulation frequency reduces the ranging error significantly. While when the modulation frequency is high enough to make the signal-to-clutter ratio greater than 1, continuing to increase the modulation frequency makes the ranging error decrease roughly, but not change much (Fig.9). Conclusions A method for spatially distinguishing forward scattered light in underwater target detection echoes using vortex beams is proposed. Thereby, the forward scattered light and the target-reflected light are obtained separately in the experiment, and the frequency response of both is analyzed by fast Fourier transform to calculate the modulation frequency sufficient to suppress the forward scattered light in the lidar-radar technique. The frequency response of forward scattered light and target scattered light in underwater target detection is simulated based on Monte Carlo method and compared with the experimental results. Both simulation and experimental results show that a high modulation frequency can improve the signal-to-clutter ratio of the underwater lidar system. And for turbid water, a higher modulation frequency is required for more effective suppression of forward scattering. To achieve a signal-to-noise ratio greater than 1, modulation frequencies greater than 700 MHz are required for an attenuation length of 11 and greater than 900 MHz for an attenuation length of 12. Ranging experiments also demonstrate that when the modulation frequency is not high enough to make the signal-to-clutter ratio greater than 1, increasing the modulation frequency results in a significant reduction in the ranging error. While when the modulation frequency is high enough to make the signal-to-clutter ratio greater than 1, continuing to increase the modulation frequency results in a general reduction in the ranging error. When the modulation frequency is high enough to make the signal-to-clutter ratio greater than 1, the ranging error decreases roughly, but the change is not significant. The findings of this study can be used as a reference for the design of carrier modulated underwater lidar systems. -
Key words:
- scattering clutters /
- vortex beam /
- frequency response /
- carrier modulation
-
图 1 当衰减长度为9时,回波中的(a)散射光和(b)信号光的时域波形及相应的频谱
Figure 1. Time-domain signal and corresponding spectra of (a) scattering clutters in the echo and (b) target-reflected signal light when attenuation length is 9
图 2 当衰减长度为11和12时信杂比与调制频率的关系
Figure 2. SCR versus modulation frequency under AL=11 and AL=12
图 4 当衰减长度为10时,回波中的(a)散射光和(b)信号光的时域波形及相应的频谱
Figure 4. Time-domain signal and corresponding spectra of (a) scattering clutters in the echo and (b) target-reflected signal light when AL=10
图 5 在回波中的散射光(a)和信号光(b)的频谱中,在不同衰减长度下,调制频率的幅度与频率的关系
Figure 5. In the spectrum of the (a) scattering clutters in the echo and (b) target-reflected signal light, amplitude of modulation frequency versus the modulation frequency at different ALs
图 6 衰减长度为11和12时,信杂比与调制频率的关系
Figure 6. SCR versus modulation frequency under AL=11 and 12
图 8 清水中不同调制频率下的测距结果
Figure 8. Ranging results for different modulation frequencies in clean water
-
[1] Zhan P, Tan W, Si J, et al. Optical imaging of objects in turbid media using heterodyned optical Kerr gate [J]. Applied Physics Letters, 2014, 104(21): 211907. doi: 10.1063/1.4880115 [2] Mullen L J, Vieira A. Application of RADAR technology to aerial LIDAR systems for enhancement of shallow underwater target detection [J]. IEEE Transactions on Microwave Theory and Techniques, 1995, 43(9): 2370-2377. doi: 10.1109/22.414591 [3] Pellen F, Intes X, Olivard P, et al. Determination of sea-water cut-off frequency response by backscattering transfer function measurement [J]. Journal of Physics D: Applied Physics, 2000, 33(4): 349-354. doi: 10.1088/0022-3727/33/4/306 [4] Pellen F, Olivard P, Guern Y, et al. Radiofrequency modulation on optical carrier for target detection enhancement in sea-water [C]//Proc SPIE Ocean Optics: Remote Sensing and Underwater Imaging, 2002, 4488: 13-24. [5] Mullen L, Contarino V M, Herczfeld P R. Hybrid lidar-radar ocean experiment [J]. IEEE Trans Microw Theory Tech, 1996, 44(12): 2703-2703. [6] Mullen L, Contarino V M, Herczfeld P R. Hybrid lidar-radar: seeing through the scatter [J]. IEEE Microw Mag, 2000, 1(3): 42-48. doi: 10.1109/6668.871186 [7] Mullen L, Herczfeld P R. Full scale hybrid lidar-radar system [C]//Proc IEEE Microwave Symposium Digest, 1996, 3: 1559-1662. [8] Dominicis L D, Collibus M, Fornetti G, et al. Improving underwater imaging in an amplitude modulated laser system with radio frequency control technique [J]. Journal of the European Optical Society Rapid Publications, 2009, 5(1): 138-138. [9] O’connor S, Mullen L J, Cochenour B. Underwater modulated pulse laser imaging system [J]. Optical Engineering, 2014, 53(5): 051403. doi: 10.1117/1.OE.53.5.051403 [10] Mullen L, Laux A, Cochenour B. Demodulation techniques for the amplitude modulated laser imager [J]. Appl Opt, 2007, 46(30): 7374-7383. doi: 10.1364/AO.46.007374 [11] Cochenour B, Mullen L, Muth J. Modulated pulse laser with pseudorandom coding capabilities for underwater ranging, detection, and imaging [J]. Applied Optics, 2011, 50(33): 6168-6178. doi: 10.1364/AO.50.006168 [12] Hang J, Yong M, Kun L, et al. Backscattering light model of seawater for modulated lidar based on stationarity of light field [J]. Journal of Beijing Institute of Technology, 2007, 16(4): 481-485. [13] Yong M A, Hang J I, Liang K. Application of modulated lidar on optical carrier for ocean exploration [J]. Laser Technology, 2008, 32(4): 346-349. [14] Mullen L. Optical propagation in the underwater environment [C]//Proceedings of SPIE, 2009, 7324: 732409. [15] Mullen L, Laux A, Cochenour B. Propagation of modulated light in water: implications for imaging and communications systems [J]. Applied Optics, 2009, 48(14): 260712. [16] Mullen L, Alley D, Cochenour B. Investigation of the effect of scattering agent and scattering albedo on modulated light propagation in water [J]. Applied Optics, 2011, 50(10): 1396-1404. doi: 10.1364/AO.50.001396 [17] Cochenour B, Mullen L. Channel response measurements for diffuse non-line-of-sight (NLOS) optical communication links underwater[C]//Ocean'11 MTS/IEEE Kona, 2011: 1-5. [18] Cochenour B, Mullen L, Muth J. Temporal response of the underwater optical channel for high-bandwidth wireless laser communications [J]. IEEE Journal of Oceanic Engineering, 2013, 38(4): 730-742. doi: 10.1109/JOE.2013.2255811 [19] Lin Hong. Study on Optical Scattering Characteristics of Marine Suspended Particles [M]. Beijing: China Atomic Energy Press, 2016. (in Chinese) [20] Alkholidi A G. Free Space Optical Communications — Theory and Practices [M]. Rijeka: InTech, 2014. [21] Feng Shiyu, Li Fengqi, Li Shaoqing. Introduction to Marine Science [M]. Beijing: Higher Education Press, 1999. (in Chinese) [22] Jantzi A, Jemison W, Laux A, et al. Enhanced underwater ranging using an optical vortex [J]. Optics Express, 2018, 26(3): 2668-2674. doi: 10.1364/OE.26.002668 [23] Cochenour B, Rodgers L, Laux A, et al. The detection of objects in a turbid underwater medium using orbital angular momentum (OAM) [C]//SPIE Defense + Security. Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series, 2017, 10186: 1018603. [24] Liao Yingqi, Yang Suhui, Li Kun, et al. Numerical simulation of performance improvement of underwater lidar by using a spiral phase plate as spatial filter [J]. Photonics Journal, 2022, 14(1): 1-3. [25] Palacios D M, Maleev I D, Marathay A S, et al. Spatial correlation singularity of a vortex field [J]. Physical Review Letters, 2004, 92(14): 143905. doi: 10.1103/PhysRevLett.92.143905 [26] Bai Yihua, Lv Haoran, Fu Xin, et al. Vortex beam: generation and detection of orbital angular momentum [Invited] [J]. Chinese Optic Letters, 2022, 20(1): 012601. doi: 10.3788/COL202220.012601 [27] Palacios D, Rozas D, Swartzlander G A. Observed scattering into a dark optical vortex core [J]. Physical Review Letters, 2002, 88(10): 103902. [28] Foo G, Palacios D M, Swartzlander G A. Optical vortex coronagraph [J]. Optics Letters, 2005, 30(24): 3308-3310. doi: 10.1364/OL.30.003308 [29] Swartzlander G A. Peering into darkness with a vortex spatial filter [J]. Optics Letters, 2001, 26(8): 8-12. [30] Sun W, Hu Y, Macdonnell D G, et al. Technique to separate lidar signal and sunlight [J]. Optics Express, 2016, 24(12): 12949-12954. doi: 10.1364/OE.24.012949 [31] Zhu Zhihan, Sheng Liwen, Lv Zhiwei. et al. Orbital angular momentum mode division filtering for photon-phonon coupling [J]. Sci Rep, 2017, 7: 40526. doi: https://doi.org/10.1038/srep40526 [32] Zhong Ruyue, Zhu Zhihan, Song Shuwei, et al. Gouy-phase-mediated propagation variations and revivals of transverse structure in vectorially structured light [J]. Physical Review A, 2021, 103(5): 053520. doi: https://doi.org/10.1103/PhysRevA.103.053520 [33] Zhu Zhihan, Chen Peng, Li Hongwei, et al. Fragmentation of twisted light in photon–phonon nonlinear propagation [J]. Applied Physics Letters, 2018, 112(16): 161103. doi: 10.1063/1.5020082 [34] Li Jing, Ma Yong, Zhou Qiankun, et al. Monte Carlo study on pulse response of underwater optical channel [J]. Optical Engineering, 2012, 53(6): 066001. [35] Li Kun, Yang Suhui, Wang Xin, et al. RF intensity modulated mid-IR light source based on dual-frequency optical parametric oscillation [J]. Optics Express, 2019, 27(4): 4907-4916. doi: 10.1364/OE.27.004907 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 47
- HTML全文浏览量: 11
- PDF下载量: 25
- 被引次数: 0

