













-
现场可编程逻辑门阵列(Field Programmable Gate Array, FPGA),性能好、灵活性高,在军工、医疗等领域有着重要的作用。但目前 FPGA 几乎被美国垄断,中国的国产化需求迫切。国产FPGA已取得突破性进展[1],国产的中低端芯片已达到基本应用需求,但其仍需在应用中发展。在开发时可能会遇到逻辑混乱、时序违例、走线困难、扇出能力差等诸多难点[2],但只有不断暴露问题,才能逐渐提升国产FPGA的可靠性。相比基于DSP的跟踪系统[3],FPGA有并行运算的优势,研究其自主可控是必然趋势[2, 4]。局限于高性能跟踪算法的复杂性,目标跟踪应用多数都采用了国外的高性能芯片实现[5-6],至今很少有关于跟踪系统国产化的文献发表。所以研究一个基于当前国产FPGA的跟踪算法具有重要的研究价值。
目标跟踪算法主要分为生成式和判别式。生成式算法基于目标的灰度、几何等特征对物体进行跟踪[7],如经典的模板匹配算法。而判别式包括相关滤波[8]和深度学习[9]等算法,一般有更高的跟踪准确度,但很难在保证高帧率的前提下实现。若用国产芯片实现目标跟踪,除了考虑逻辑资源的局限性,还需考虑实现方式的劣势。利用进口FPGA实现复杂算法的较大优势是可直接用C++、python语言进行开发,极大地减小了开发难度。国产芯片多数需用Verilog开发,即使是利用高级综合工具实现了跟踪功能的人员也不能轻易将其国产化。而且目前国内各厂家FPGA的基础架构不同,考虑该研究在其他芯片中应用的可行性,文中目标是研究一个易于Verilog设计、有通用性的跟踪算法,并提高实时性和鲁棒性。所以文中选择适合用流水线设计的模板匹配作为基础算法,其因简单性和准确性得到广泛应用,分为基于灰度和特征相关两类。用灰度值进行匹配的方法简单,但对于尺度变化和部分遮挡的情况效果不佳[10]。基于特征的算法可提高鲁棒性[11],但复杂的特征提取也有硬件需求较高的问题,会受到芯片资源的限制。基于灰度的模板匹配一直被研究与改进,基本方法有绝对差异和(Sum of Absolute Difference, SAD)、差分平方和(Sum of Squared Difference, SSD)和归一化互相关(Normalized Cross Correlation, NCC)。这三种方法衡量相似性时会严格一对一地对比模板和候选窗口图像中的所有像素点,抗干扰能力较差,当目标变化复杂时,跟踪性能严重下降。而BBS[12]方法是在两个点集之间进行相似性测量,当存在较大背景噪声、遮挡和非刚性变形时,依然有较精准的跟踪效果。后又有DDIS[13]方法在此基础上,进一步提高了模板匹配的抗干扰能力。但这两种方法需求取两个patch集合的两两匹配分数,若用中端FPGA实现将会面临资源不足的问题。后来QATM[14]等方法则是结合深度学习的匹配算法,目前不适合用国产FPGA实现。
文中针对SAD模板匹配算法缺乏合适更新模板机制以及鲁棒性不足等问题,提出了求窗口内最小绝对差和(Sum of Minimum Absolute Difference, SMAD)的方法,解决了SAD衡量相似性过于严格的问题。同时针对基本逻辑单元有限的问题,文中进一步改进了SMAD方法,大大降低了其对加减法器的消耗。此外,文中还提出一种易于FPGA硬件实现的类金字塔更新策略,从而更好地适应目标的尺度变化。验证文中算法的跟踪性能后,将其用紫光FPGA实现并搭建出了一个实时目标跟踪系统,进一步说明了目标跟踪系统国产化设计的可行性。
-
模板匹配是在一帧图像中提取和模板同样大小的候选窗口图像,通过衡量两图像相似度的方法搜索与目标最相似的位置。其中SAD的方法由于没有乘除法运算,用其在FPGA中实现目标跟踪,可以节省大量逻辑资源。假设模板T尺寸为$m×n$,视频图像I尺寸为$M×N$,则SAD值可用如下公式求出:
$$ S(x,y)={\sum }_{c=1}^{m}{\sum }_{r=1}^{n}\left|T\right(c,r)-I(x+c-1,y+r-1\left)\right| $$ (1) 式中:$ 1 \leqslant x \leqslant M-m+\mathrm{1,1} \leqslant y \leqslant N-n+1 $; $ S\left(x,y\right) $为以$ \left(x,y\right) $为左上角的候选子图的SAD值。
该算法步骤为:1)从初始帧中提取模板;2)将模板在下一帧图像中逐像素点移动,当前模板覆盖区域为候选子图。通过求二者像素点的SAD来得到该子图的差异值,直到求出整幅图的所有候选子图差异值为止;3)以相似度最大(即差异值最小)的位置,作为本帧的目标位置; 4)对每一帧图像执行步骤2)~3)。
由于该方法测量相似性时会将模板和候选窗口中的所有像素逐一比对,在跟踪目标变化小,图像背景噪声少的情况下可以实现高效跟踪。但当目标自身变化、存在遮挡、光照改变时,跟踪成功率会大大降低,所以SAD的相似度衡量方法有待改善。
-
针对传统模板匹配受复杂场景、遮挡、形变影响严重的缺点,BBS[9]和DDIS算法[10]将模板和候选窗口分成包含多个patch的集合,然后求每个patch的最佳匹配,依据双向匹配数量确定目标位置。但是这两种方法用硬件实现的复杂度较高,如果要保证不丢帧地实时处理图像数据流,SAD需并行求出$m \times n$对像素点的相似度,但这两种方法需求出$(m/p \times n/p{)}^{2}$对patch的相似度(p一般取3),并行计算复杂度远高于SAD。因此,文中也从避免模板与待匹配子图的逐像素点严格求差值的角度考虑,提出了一种求窗口内最小绝对差之和(SMAD)的方法。基本思想是当评价候选子图与模板的相似度时,不直接求模板某像素值与待匹配子图对应位置的像素值之差,而是求其与待匹配子图对应位置周围9个像素点的最小差值。如图1所示,当模板滑动到视频图像的$ (x,y) $位置时,在求模板图像$(c_0,r_0)$位置像素点$T(c_0,r_0)$与待匹配子图的相似度时,需考虑图像中红框内的9个位置像素点与$T(c_0,r_0)$的差值,以其中的最小绝对差作为$(c_0,r_0)$的差异度。而在求模板的边缘位置的窗口内最小绝对差时,不考虑周围像素点,只求对应像素点的绝对差即可,如图1中的蓝色像素对所示。

图 1 SMAD方法示意图
Figure 1. Schematic diagram of SMAD method
如果用$ D(x,y) $表示视频图像中$ (x,y) $位置待匹配图的SMAD值,则可用公式(2)表示:
$$\begin{split} D\left(x,y\right)=& {\sum }_{c=1}^{m}{\sum }_{r=1}^{n}\underset{\begin{array}{c}-1 \leqslant p \leqslant 1\\ -1 \leqslant q \leqslant 1\end{array}}{{\rm{min}}} \left(\right|T(c,r)-I(x+ \\& c{'}- \text{1},y+{r}{{'}}-1)|) \\& c{'}={{\rm{min}}}({{\rm{max}}}(c+{p, 1}\left){,m}\right) \\& r{'}={{\rm{min}}}({{\rm{max}}}(r+{q,1}\left){,n}\right) \end{split} $$ (2) SMAD方法通过窗口改进SAD方法对每个像素异常值都敏感的劣势,从而提高了模板匹配算法对噪声、形变、局部遮挡情况的鲁棒性。当视频图像中某个像素点存在较大噪声时,可以通过周围像素点是否与对应模板像素值接近来滤除这些异常值的影响。而目标形变导致的部分特征发生偏移,局部遮挡导致的部分区域出现异常值,也可通过窗口内求最小绝对差的思想来提高匹配的成功率。
-
如果采用的模板大小为32×32,计算模板与同大小的候选子图时,用SAD方法需要1024次减法求绝对差,然后采用如图2所示的多级流水加法器求和,总共需要综合出$32\times 32\times \Big( 1+\dfrac{1}{2}+\dfrac{1}{4}+\dfrac{1}{8} \cdots + \dfrac{1}{1 \; 024} \Big)= 2 \; 047$个加减法器。如果采用SMAD方法实现模板匹配,理论上会有更多的减法器和比较器开销,待匹配子图的边缘区域需要$31 \times 4$个减法器,其余区域的窗口内绝对差总共需要$30 \times30 \times 9$个减法器,加上多级流水求和的1023个加法器,需要9247个加法或减法器,约是传统SAD方法的4.5倍。

图 2 多级流水线加法器
Figure 2. Multistage pipelined adder
紫光同创FPGA的查找表资源有限、块RAM充足,基于文中研究出了一种基于最大值滤波和最小值滤波的优化方法,如图3所示。

图 3 SMAD方法的优化前后对比
Figure 3. Comparison before and after optimization of SMAD method
图中表格的“/”前后分别为$T(c_0,r_0)$和$T(c_1,r_1)$的最小绝对差。先将图像数据进行最大值滤波与最小值滤波,得到原像素值周围的3×3窗口内的最大与最小值,之后在计算SMAD时,不比较窗口内的9个值与模板的差异,而是只比较与最大值、最小值的差异。以$T(c_0,r_0)$和$T(c_1,r_1)$所对应的两个小窗口为例,最大值滤波后的值都为6,最小值滤波后的值都为3。如果模板中$ T(c,r) $的值小于等于3或者大于等于6,则窗口内最小绝对差值一定为模板像素与3或6的差距。当$ T(c,r) $的值在最大值滤波与最小值滤波结果范围内时,考虑大多数像素值变化的平滑性,默认窗口内存在与模板相同的像素值,即令最小绝对差值为0,如图3表格中$ T(c,r) $为5的情况所示。当出现如表格中$ T(c,r) $为4的例外情况,最小绝对差理论值与通过最大值与最小值滤波优化后的结果存在差异,但这种差异较小,对最终通过多级加法求和后的SMAD值影响不大,可忽略这种情况带来的偏差。通过此方法处理数据,需要的加减法器仅为2947个,只用了理论上31.8%的加减法器,大大降低了资源消耗。
-
当形变和遮挡现象较为严重,目标尺度变化较大时,仅用SMAD策略不足以支持目标的持续跟踪,需要一种合适的模板更新机制来进一步提升跟踪效果。目前更新模板主要从时间和形变两个角度考虑,即设置更新模板的时间间隔或者当最佳匹配的差异值超过阈值后更新模板。这两种更新策略都没有考虑到目标尺度变化较大时,模板大小是否还合适的问题。当目标变小后更新模板会导致模板包含较多背景信息,当目标变大后不能提取到重要特征,进而导致跟踪精度下降。文中在阈值更新策略的基础上,提出了一种类金字塔的更新策略,通过在更新模板时提供的目标尺度信息,决定新模板的提取尺度。
提出的类金字塔模板更新策略和经典的高斯金字塔不同的是,文中主要从节省资源角度出发,并没有构建多个图层,而是只利用一幅模板图和候选子图实现了多尺度的滑窗匹配。如图4所示,上面的3个模板图T为从视频流中提取的$m \times n$的模板,下面的3个图为$M \times N$的某帧图像I。为保证模板以某个像素位置为中心,模板的行和列数都设为奇数。当求模板T与图像I中某$m \times n$候选子图的相似度时,应如中间图所示,按像素坐标一一对应。为了能够同时测量现目标尺度相对于模板目标尺度变小或变大后的相似度,分别采用了图4中左图和右图的对应关系。如果当前目标大小几乎变为原来的一半,则模板降采样后和含有目标的待匹配子图的中心区域有较高的相似度;同理,如果当前目标大小几乎变为原来的两倍,则含有目标的待匹配子图降采样后和模板的中心区域有较高的相似度。文中直接通过间隔取像素点的方式来达到降采样的目的,如图4中左上角和右下角图中标黄的点为降采样后有效的像素值,再分别与待匹配子图或模板中心的$(m-1)/2 \times (n-1)/2$子图按照蓝色线对应。然后依据文中提出的SMAD方法来计算候选窗口与模板的三种差异值D1~D3。其中,D1最小时表明当前目标变小,更新模板时提取行列数各缩小为之前的1/2;D3最小时则表明当前目标变大,更新模板时将提取行列数各增加为之前的两倍。

图 4 类金字塔策略
Figure 4. Pyramid-like strategy
-
在功能和性能上,国内FPGA都与进口芯片存在一定的差距。如表1所示,在产品种类、工艺水平、门数、IP核、市场、技术支持等方面, 国外FPGA都存在较大优势。目前中国FPGA以40、28 nm工艺为主,但早在2011年国外就发布了采用28 nm工艺的FPGA工程样片。在EDA工具方面,国内水平相对落后,存在布通率较低等问题。但使用国内芯片具有可控性高、自主性强的优势,用其研发各个领域的技术产品已经成为主流趋势,况且国产FPGA性能方面能够满足中、低端的市场需求。不过国产芯片开发方式单一,在门电路延迟、扇出能力、布局布线方面存在劣势,需要通过优化逻辑、添加时序约束、物理约束改善。为了研究能达到较高帧率、适用于国产FPGA的跟踪算法,文中选择紫光同创Logos2系列的PG2 L100 H-6 IFBG676芯片将其实现并验证。
表 1 国内外FPGA对比
Table 1. Comparison of domestic and foreign FPGAs
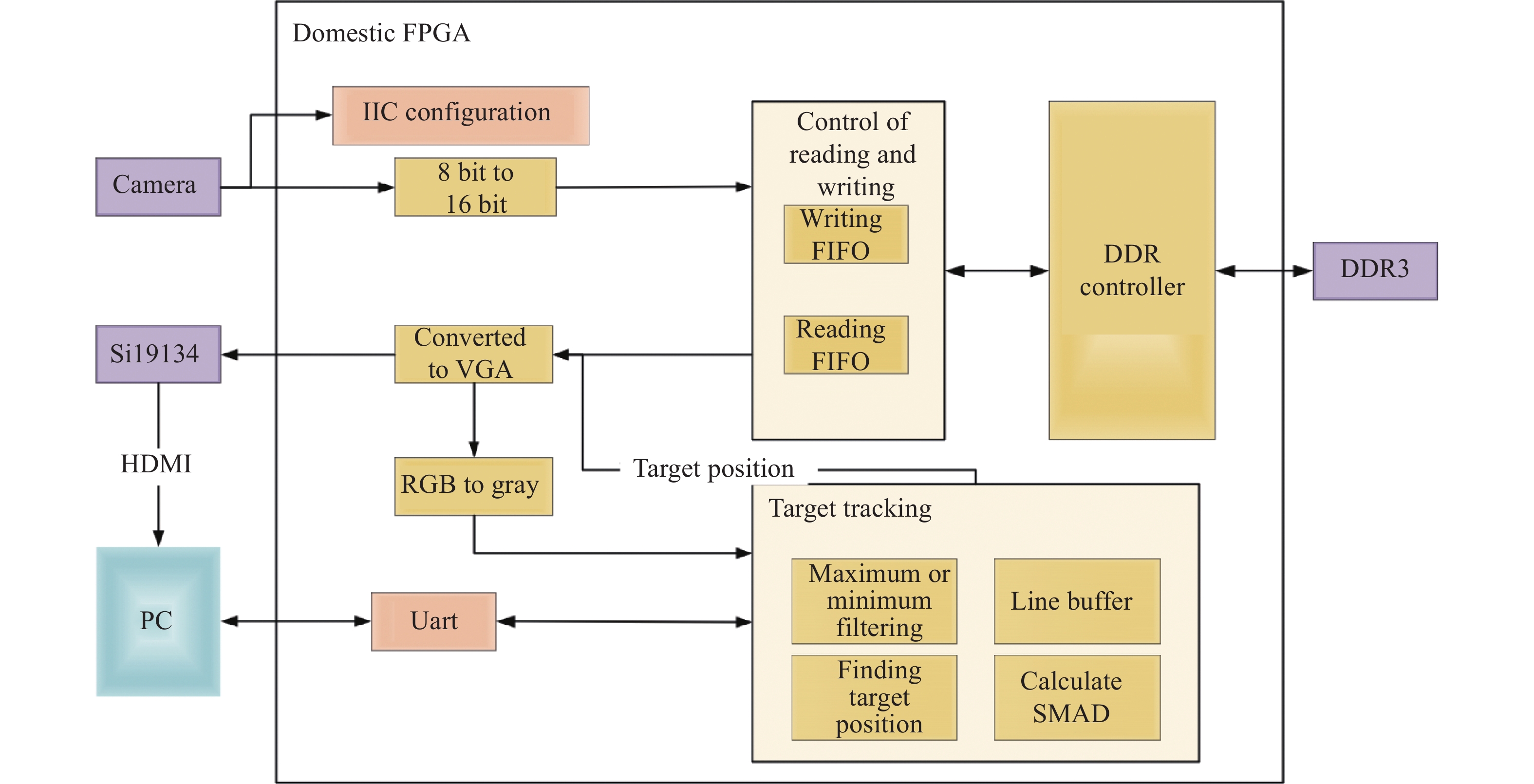
Metrics Foreign FPGA Domestic FPGA Types More Fewer Process 7 nm 28 nm Gates 100 million Most: 10 million IP cores More Fewer Market High/mid/low end Mid/low end Technology Mature Immature Autonomy Poor Better 文中基于该芯片构建了一个国产化的实时目标跟踪系统,并进行算法设计与验证,整体框图如图5所示。首先通过IIC配置OV5640相机分辨率为1280×720,然后将分两个时钟输出的8 bit RGB565数据流转换成16 bit像素数据。之后通过帧读写控制模块依据摄像头的场同步信号切换DDR3写入某帧数据的起始地址。当读取下一帧时,读地址设置为当前写地址的前一帧起始地址,保证读和写的地址不冲突。此外该模块还需例化2个异步FIFO来解决跨时钟域问题。从DDR3读出图像数据后,将数据按照VGA标准转换成1280×720视频流。视频流一路转成灰度图传到目标跟踪模块求取当前帧目标位置,另一路传到HDMI视频编码芯片,将视频实时输出显示。此外,文中在将图像数据转成VGA标准时,依据跟踪位置实时画出目标框。同时,还设计了UART通信模块用于实现上位机点选和跟踪目标位置的回传。通过提高视频数据读出时钟并添加时序约束,该系统的帧率可达100 fps,有较好的实时性。

图 5 目标跟踪平台结构框图
Figure 5. Structural diagram of the target tracking platform
-
最大值和最小值滤波模块为文中优化SMAD方法的核心模块,其硬件架构如图6所示。用FPGA实现滤波算法,需要利用多个FIFO实现多行缓存。FIFO深度设为图像一行的大小,FIFO数量取决于模板大小,构成最终的Line Buffer模块。先通过两个深度为一行的FIFO得到3行并行数据,之后通过触发器得到$3\times 3$窗口。文中实现了能在3个数据中找最大值和最小值的模块,通过例化4个该模块并用两级流水线即可求出9个数据中的最大和最小值。此外,该模块还需输出和最大值、最小值时序对齐的原像素数据、场信号和数据有效信号,之后输入到目标跟踪模块。

图 6 最大值和最小值滤波的硬件架构
Figure 6. Hardware architecture for maximum and minimum filtering
-
类金字塔的SMAD计算模块需要Line Buffer模块来形成符合模板尺寸的窗口数据,模板的寄存也在该模块中实现。依据上位机传来的初始目标位置提取,为了方便求取模板中心,文中模板大小设为31×31。跟踪过程中,如果尺度发生改变则会通过降采样的方式增加模板的提取范围,相当于将模板尺度分为31×31、62×62、124×124三级。该模块的输入包括:1) 31行并行的最大值和最小值滤波数据及其有效信号;2)像素数据位置,依据场同步和有效信号利用计数器产生,为模板提取时提供数据流的坐标;3)模板更新请求,该信号有效时,需在下一帧提取新的模板;4)模板位置,初值为点选目标位置,有更新模板请求时,变为当前的目标跟踪位置。而输出信号包括:1) SMAD数据,滤波后的图像数据流和模板求绝对差后通过多级流水求得;2) SMAD有效信号;3)尺度信号,利用类金字塔思想产生的尺度标志。
此模块以上位机点选标志作为复位信号,当串口模块输入有效点选位置才开始真正工作。此时提取模板模块会依据当前数据流的位置信息决定是否在本帧提取模板,如果数据流已经超过了模板框的位置,则等到下一帧再提取模板,否则直接在本帧提取。同时通过寄存器缓存的待匹配子图的像素值、最大值和最小值滤波数据,将这3个数据按照图4所示的类金字塔组合方式输入到求绝对差值的模块,最终会得到3个尺度的绝对差数据。模板数据如果小于最小值,则输出最小值与其的绝对差,如果大于最大值,则输出最大值与其的绝对差,否则输出为0。然后,将3个绝对差输入到并行的多级流水加法器模块,得到3个SMAD值。以D2为相似度的衡量,作为分数信号输出,而尺度信号表明了D1、D2与D3的大小关系。由于D2是$m \times n$个差值的求和,加数是D1和D3的4倍,所以,将D1、D3与D2右移两位的值进行比较。当产生更新模板请求后,存储模板图时会依据该尺度信息在三级模板尺度中进行切换。
-
目标搜寻模块是上述模块的后续流水设计,该模块主要用来寻找SMAD数据流的最小值。其记录最小值所对应的像面位置,并以此为最终的跟踪目标位置输出到VGA转换模块(依据跟踪结果画出跟踪框)和串口通信模块(将位置信息传给上位机)。该模块的实现逻辑如图7所示。其输入主要为类金字塔的SMAD计算模块输出的SMAD数据流。依据输入数据有效和场同步信号,用计时器产生了数据流的坐标位置col和row,之后依据该坐标判断数据流是否在搜索范围内,不在则不对数据流采取任何操作。如果是在搜索范围内,则需判断该分数数据流SMAD值是否为最佳。文中采用current_smad、current_scale、current_col、current_row这4个寄存器变量来存储某一帧中目前最佳匹配对应的差异值、尺度、列坐标和行坐标,在每一帧开始之前,将current_smad赋值为其位宽范围内的最大值。如果输入分数在搜索范围内且小于current_smad,则更新上述四个寄存器变量直到场同步信号拉低。一帧数据处理完成后,依据最佳匹配差异值current_smad与阈值的关系判断是否产生模板更新请求。同时输出目标跟踪位置track_col和track_row,跟踪有效信号拉高并输出跟踪目标的尺度信息track_scale。

图 7 目标搜索模块流程图
Figure 7. Flowchart of the target search module
-
文中利用Matlab实现了提出的跟踪算法,并用OTB数据集进行测试。目标跟踪算法性能的评价指标主要从目标中心像素误差和矩形框重叠率两个角度出发。中心像素误差指算法跟踪结果的中心点与真实目标中心点位置的欧氏距离,其缺乏尺度的考量。重叠率是指算法跟踪结果的波门与真实波门的重合度。
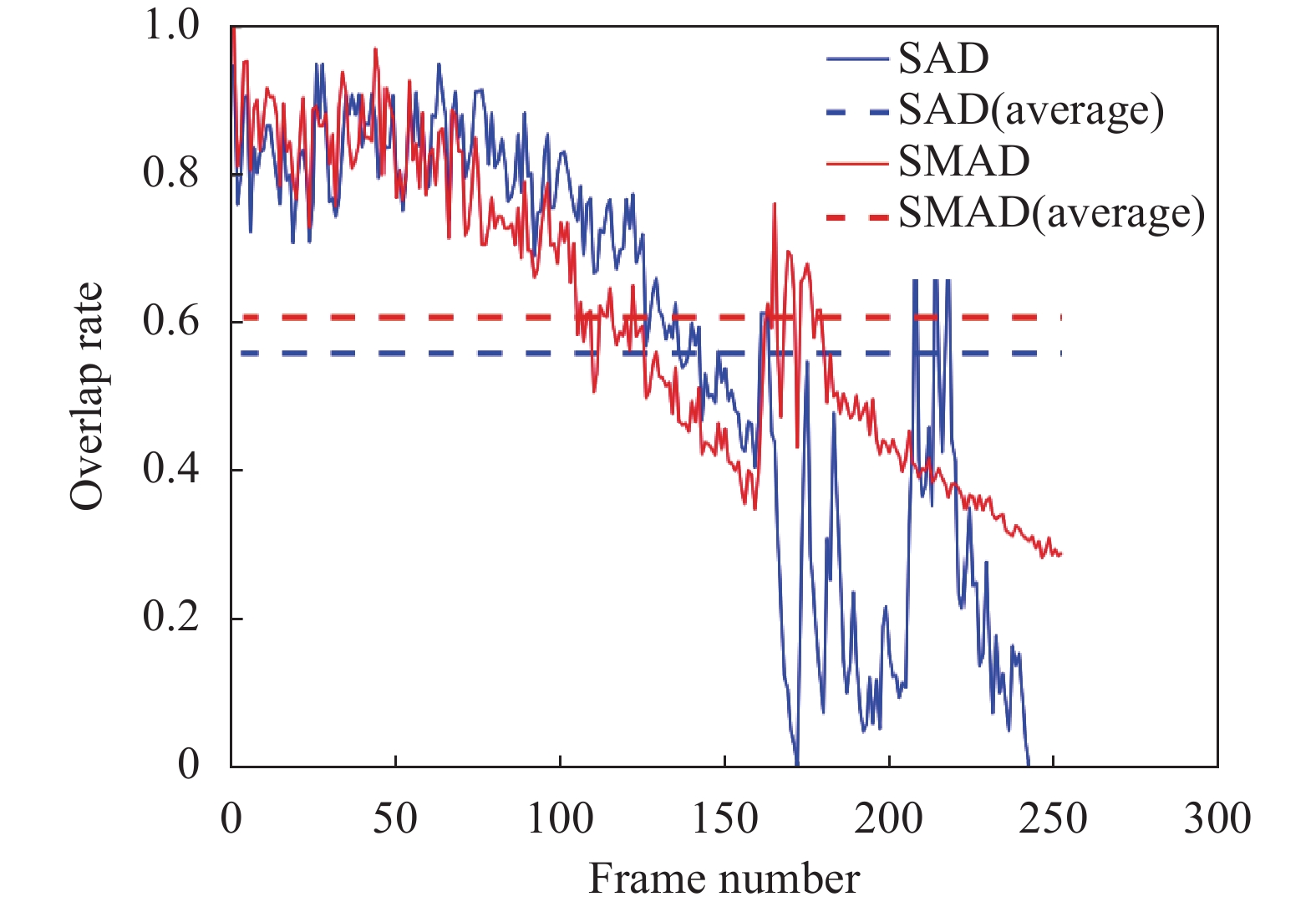
为了验证SMAD相较于SAD方法的提升效果,选取有旋转、尺度变换、遮挡、快速运动属性的图像序列,测试二者跟踪每一帧图像的重叠率,如图8所示。跟踪前期二者的指标差距不大,但随着目标发生变化且被遮挡后,SAD算法重叠率变为0,即跟踪失败,而SMAD方法依然保持0.28的重叠率。为了验证类金字塔策略在更新模板时的正确性,文中利用如图9所示的飞机模型进行测试,当切换模板时显示当前模板在图中的位置。图中红框内图像表示模板,当目标尺度变化较小时,维持当前模板尺度,随着模型尺度增大,模板将会切换到更大尺度。
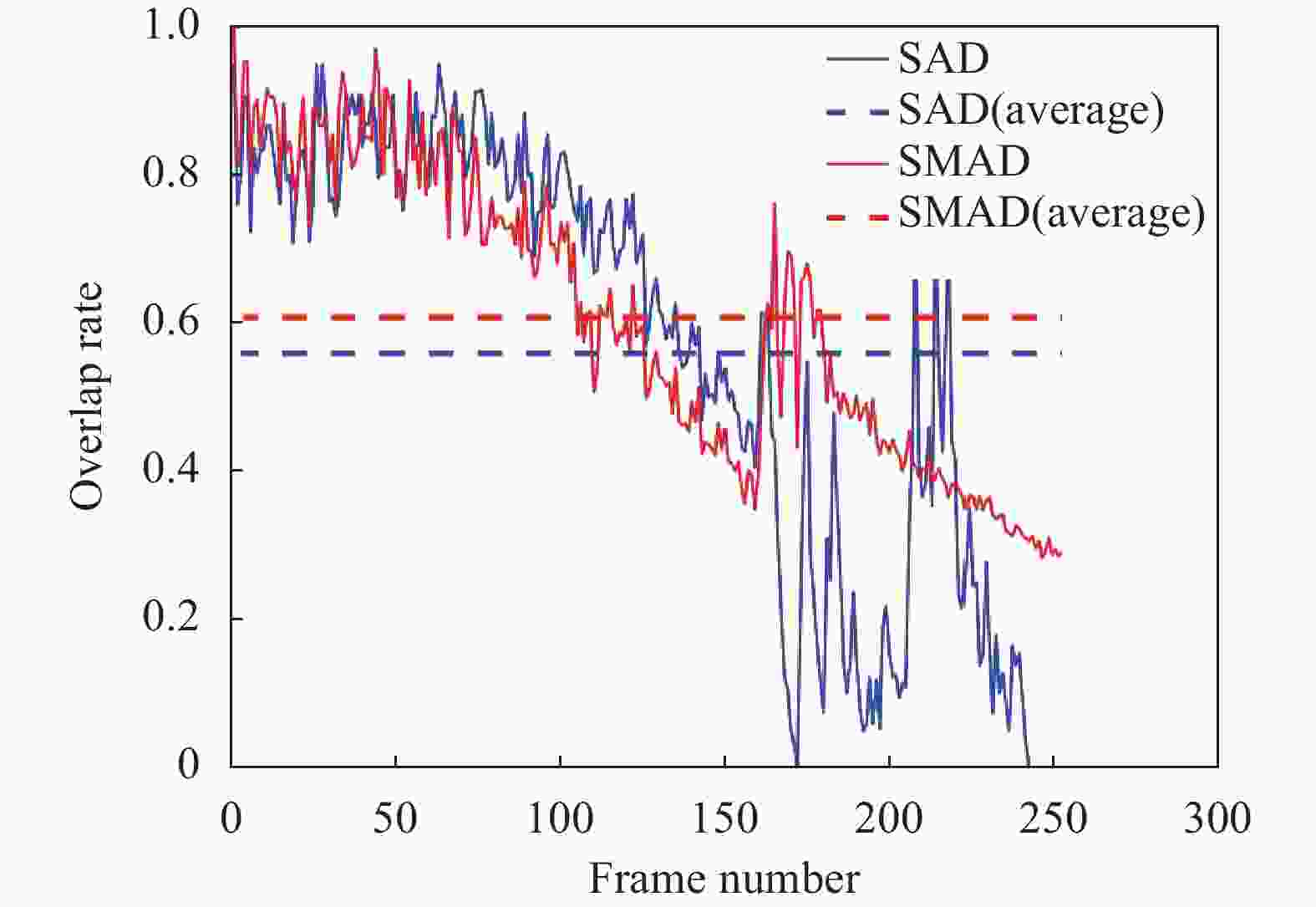
图 8 SMAD和SAD跟踪指标对比
Figure 8. Comparison of tracking indicators between SMAD and SAD

图 9 模板的尺度切换
Figure 9. Scale switching of the template
模板匹配的核心就是模板和视频图像中子窗口的相似度衡量,为了进一步验证文中研究算法的性能,文中除了选用SAD、SSD、NCC这三种传统的度量方法,还选用了具有高鲁棒性的无参数BBS和DDIS算法进行对比。由于国产FPGA性能的局限性,涉及深度特征的算法文中不予考虑,且BBS和DDIS算法是基于灰度和位置信息进行跟踪的,如果采用其他复杂特征更会增加FPGA实现的难度。为了直观地对比各个算法的跟踪性能,文中截取了汽车序列(如图10所示)的其中四帧,图中左上角数字即为图像序列帧号。当汽车尺度变大并逐渐被树干遮挡时,基于SAD、SSD和NCC三种相似度衡量的跟踪算法都会跟踪失败。而BBS和DDIS算法具有较高的抗遮挡能力,能在遮挡后依然跟踪成功,文中提出的SMAD算法也能成功跟上汽车目标,证明了文中算法的抗遮挡和尺度适应能力。

图 10 各模板匹配算法跟踪汽车序列的性能比较
Figure 10. Performance comparison of each template matching algorithm tracking the car sequence
为了测试跟踪算法在各个场景下的总体性能,可通过统计多次跟踪结果的平均指标进行评价,文中采用平均重叠率(Average Overlap Rate, AOR)和成功率(AOR大于一定阈值的占比)两个指标来进行算法之间的比较,得到表2。其中SMAD-0表示未添加类金字塔策略的SMAD方法,和经典的SAD方法相比,各个场景下的跟踪指标都有所提升,验证了该相似性度量方法的抗干扰能力。对比SMAD-0和SMAD在尺度变化和综合场景下的跟踪指标,成功率和AOR都有所提高,验证了类金字塔更新策略的有效性。
表 2 各跟踪算法的指标对比
Table 2. Comparison of metrics for each tracking algorithm
Rotational deformation Scale change Partial occlusion Various scenarios Success rate AOR Success rate AOR Success rate AOR Success rate AOR SAD 0.7604 0.39548 0.8012 0.5364 0.7412 0.33176 0.7680 0.3818 SSD 0.7563 0.36219 0.7786 0.4997 0.7454 0.33879 0.7511 0.3695 NCC 0.7588 0.39248 0.7567 0.4404 0.7362 0.30951 0.7467 0.4228 BSS 0.7642 0.45265 0.8385 0.6817 0.784 7 0.50696 0.7851 0.4974 DDIS 0.768 3 0.456 25 0.8273 0.6188 0.7802 0.509 51 0.8197 0.5399 SMAD-0 0.7640 0.44162 0.8261 0.5583 0.7775 0.48105 0.7842 0.4974 SMAD 0.7634 0.44186 0.859 4 0.682 1 0.7791 0.48060 0.829 4 0.540 6 对比表中SAD和SMAD的跟踪指标可以验证文中优化策略的整体提升效果,其中成功率提高了8.0%,AOR提高了41.5%。文中算法和目前有高鲁棒性的DDIS匹配方法相比,在综合场景下成功率和AOR分别提高了1.18%和0.13%。从三种特定场景的跟踪指标进行分析,DDIS算法在旋转形变和部分遮挡场景下的跟踪性能更优,但当目标发生尺度变化时文中算法有更好的跟踪效果。从FPGA流水线设计角度考量,文中算法有较大的优势。
-
文中将如图5所示的各个模块用QuestaSim软件进行了功能验证。为了测试跟踪结果的正确性,文中将初始帧目标的中心坐标设为$ \left(\mathrm{40,20}\right) $,每一帧目标都向右下角平移一个像素,即在x和y方向位置都加1。得到仿真结果如图11所示,其中点选位置target_col和target_row设为初始帧中目标的中心,跟踪模块输出的跟踪结果为track_col和track_row,二者每一帧都加1,与理论值相符。同时仿真分析各模块的延迟时间,将图像数据转灰度并进行跟踪处理的整个流水线的延时时间为16个行同步周期+37个时钟周期。其中,行延迟取决于模板大小和滤波模块的窗口大小,时钟延时是由于多级加法器(10个时钟周期)、窗口数据寄存(15个时钟周期)和其他时序优化导致。之后使用紫光FPGA进行硬件开发,整个跟踪系统的查找表(LUTs)、寄存器(Registers)、专用RAM(DRM)和输入输出接口(I/O ports)消耗如表3所示。其中每个DRM有36 kBits的存储单元,可独立配置为两个18 kBits单元。LUTs和Registers作为基本逻辑资源,主要消耗在目标跟踪算法的多级流水加法器部分,目标跟踪模块使用了67% 的LUTs、40.5%的 Registers,其余模块的消耗量相对较少。利用的DRM中有30个用于实现目标跟踪模块的Line Buffer,其余6.5个用于实现DDR读写的FIFO缓存、最大值与最小值滤波、摄像头参数存储。I/O ports用于与摄像头、DDR、视频编码芯片和串口相连。

图 11 目标跟踪模块功能仿真波形图
Figure 11. Functional simulation waveform of the target tracking module
表 3 FPGA资源消耗
Table 3. Resource consumption of the FPGA
Resources Consumption Consumption percentage LUTs 48457 72.76% Registers 58587 43.98% DRM 36.5 23.55% I/O ports 102 34.00% -
文中使用Qt Creator开发了与基于国产FPGA的目标跟踪平台适配的上位机应用程序。其主要实现以下功能:1)读取FPGA传来的视频数据,并实时显示;2)能实现目标点选功能;3)通过串口接收FPGA回传的目标跟踪位置。为了测试文中搭建的目标跟踪系统,利用上位机程序和该系统进行联合实验。基于豪威科技的OV5640摄像头,把坦克缩比模型作为跟踪目标对平台进行了测试。
文中选取不同背景,在目标发生尺度变化、运动方向和速度变化时,测试该平台的跟踪情况。先选取比较空旷的广场作为背景,测试跟踪算法的基本性能。在上位机点选目标后,令坦克模型进行无规则运动,若跟踪框中心为目标像素点,则判定跟踪有效。测试结果如图12(a)所示,验证了文中搭建系统的实用性。然后,文中选取林地草坪为背景,控制坦克模型沿任意方向运动。由于草地与缩比模型颜色相近且存在模型底部遮挡问题,更能测试跟踪平台的鲁棒性。如图12(b)所示的实验表明,在存在干扰的背景下,该目标跟踪平台仍然可以成功跟踪到目标。

图 12 目标跟踪系统的跟踪实验
Figure 12. Tracking experiment for a target tracking system
此外,文中也进行了跟踪平台的抗遮挡能力测试实验,如图13所示。当模型被草丛挡住一部分时,文中的跟踪平台仍能成功跟踪到目标,进一步验证了文中提出方法的可行性。

图 13 目标跟踪系统的抗遮挡测试
Figure 13. Anti-occlusion test of target tracking system
-
为打破技术垄断,提高目标跟踪应用产品的自主性,文中从国产FPGA性能和跟踪帧率两个角度进行考率,改进了传统的SAD模板匹配方法,提出了一种SMAD方法。并通过最大值滤波与最小值滤波策略降低了其流水线设计的逻辑资源消耗,总共需要的加减法器资源减少为原来的31.8%。针对跟踪目标尺度变化较大的情况,文中研究出了一种类金字塔的模板更新策略来提升算法的跟踪性能。基于OTB数据集的实验结果表明,文中提出的算法与SAD方法相比,跟踪成功率和AOR分别提高了8.0%、41.5%。相比于目前具有较强抗干扰能力的DDIS算法,跟踪成功率提高了1.18%,AOR提高了0.13%,且有着更适合利用FPGA进行流水线设计的优势。然后,文中在国产FPGA上构建了实时的目标跟踪系统,跟踪帧率可以达到100帧/s。其次,文中对其进行了跟踪性能测试,结果表明该系统的效果较好,为高帧率目标跟踪系统的国产化提供了参考方案。
High frame rate target tracking method using domestic FPGA
-
摘要: 由于复杂度较高的跟踪算法多数采用国外芯片实现,基于国产FPGA的跟踪方法得到了研究。针对易于FPGA设计的模板匹配算法鲁棒性不足的问题,基于绝对差和(SAD)相似性度量方法,提出了求窗口内最小绝对差和(SMAD)的方法。利用最大值和最小值滤波预先处理窗口内图像数据,再求最小绝对差,将SMAD算法的加减法器资源消耗降低为原来的31.8%。提出的类金字塔的方法在节省逻辑资源的同时,提高了对目标尺度变化的适应性。OTB数据集的实验表明:提出的方法与鲁棒性较高的DDIS算法相比,跟踪成功率和平均重叠率分别提高了1.18%、0.13%,又有易于流水线设计的优势。利用国产FPGA实现了帧率可达100 fps的实验系统并验证其跟踪性能,为在国产FPGA上实现高帧率目标跟踪系统提供了解决方案。Abstract:
Objective Target tracking plays an important role in the military, medical and other fields, and Field Programmable Gate Array (FPGA) is widely used in the direction due to its good performance and high flexibility. However, at present, limited to the complexity of high-precision tracking algorithms, most of the target tracking systems are implemented by foreign high-performance chips, which leads to weak autonomy and controllability. If domestic chips are used to achieve target tracking, it will face the problem that there are few IP cores and most modules need to be designed in Verilog. In addition, the feasibility of the research algorithm in other domestic FPGAs needs to be considered. Therefore, the objective is to study a tracking algorithm that is easy to design in Verilog, has generalization, and improves real-time and robustness. Methods Template matching is easy to design with pipelines and is selected as the basic algorithm, which is widely used due to its simplicity and accuracy. Among them, the template matching algorithm based on Sum of Absolute Difference (SAD) has no multiplication and division operation, which is suitable for FPGA implementation with limited resources. This tracking algorithm has too strict constraints, which leads to the problem of insufficient robustness. Based on the Sum of Absolute Difference (SAD) similarity measurement method, a method for finding the Sum of Minimum Absolute Difference (SMAD) in the window is proposed. In order to reduce resource usage, the maximum and minimum filtering (Fig.3) is used to preprocess the image data in the window and then the minimum absolute difference is obtained, which reduces the resource consumption of the addition and subtraction of the SMAD method to 31.8%. Moreover, a pyramid-like update strategy (Fig.4) that is easy to implement by FPGA hardware is proposed to better adapt to the scale change of the target. In order to verify the tracking performance of proposed algorithm, Unigroup FPGAs are used to implement it and build a real-time target tracking system (Fig.5). Results and Discussions Based on the two indicators of Average Overlap Rate (AOR) and success rate, the algorithm comparison experiment was carried out with the OTB dataset. It verified that the proposed algorithm has certain anti-occlusion and scale adaptability (Fig.10). Compared with the SAD method, the tracking metrics in each scenario are improved. In the scale change and synthesis scenario, after the SMAD method is added to the pyramid-like strategy, its success rate and AOR are improved, which verifies the effectiveness of the pyramid-like update strategy (Tab.2). Compared with the robust DDIS algorithm, the proposed method improves the average success rate and overlap rate by 1.18% and 0.13%, respectively, and is easier to design with FPGA. Then the target tracking system is implemented by domestic FPGAs. The delay time is 16 line synchronization cycles plus 37 clock cycles and tracking frame rate can reach 100 frames per second. Different outdoor backgrounds were selected to test the tracking of the system when the target changed in scale, direction of motion and speed (Fig.12). The anti-occlusion test experiment of the tracking platform shows that (Fig.13) when the target is partially occluded, the tracking system can still successfully track the target, which further verifies the feasibility of the proposed method. Conclusions In order to break the technology monopoly and improve the autonomy of target tracking application products, the traditional SAD template matching method is improved considering the limitations of domestic FPGA and the performance of tracking algorithms. The SMAD method is proposed and its resource consumption is optimized. Combined with a pyramid-like template update strategy, its tracking performance is improved. The experiments of OTB dataset and domestic tracking system verify its tracking effect. It provides a reference scheme for the localization of high frame rate target tracking system. -
Key words:
- domestic FPGA /
- target tracking /
- template matching /
- high frame rate
-
图 10 各模板匹配算法跟踪汽车序列的性能比较
Figure 10. Performance comparison of each template matching algorithm tracking the car sequence
图 11 目标跟踪模块功能仿真波形图
Figure 11. Functional simulation waveform of the target tracking module
表 1 国内外FPGA对比
Table 1. Comparison of domestic and foreign FPGAs
Metrics Foreign FPGA Domestic FPGA Types More Fewer Process 7 nm 28 nm Gates 100 million Most: 10 million IP cores More Fewer Market High/mid/low end Mid/low end Technology Mature Immature Autonomy Poor Better  下载: 导出CSV
下载: 导出CSV
表 2 各跟踪算法的指标对比
Table 2. Comparison of metrics for each tracking algorithm
Rotational deformation Scale change Partial occlusion Various scenarios Success rate AOR Success rate AOR Success rate AOR Success rate AOR SAD 0.7604 0.39548 0.8012 0.5364 0.7412 0.33176 0.7680 0.3818 SSD 0.7563 0.36219 0.7786 0.4997 0.7454 0.33879 0.7511 0.3695 NCC 0.7588 0.39248 0.7567 0.4404 0.7362 0.30951 0.7467 0.4228 BSS 0.7642 0.45265 0.8385 0.6817 0.784 7 0.50696 0.7851 0.4974 DDIS 0.768 3 0.456 25 0.8273 0.6188 0.7802 0.509 51 0.8197 0.5399 SMAD-0 0.7640 0.44162 0.8261 0.5583 0.7775 0.48105 0.7842 0.4974 SMAD 0.7634 0.44186 0.859 4 0.682 1 0.7791 0.48060 0.829 4 0.540 6
下载: 导出CSV
表 3 FPGA资源消耗
Table 3. Resource consumption of the FPGA
Resources Consumption Consumption percentage LUTs 48457 72.76% Registers 58587 43.98% DRM 36.5 23.55% I/O ports 102 34.00%
下载: 导出CSV
-
[1] Khan S M, Mann A, Peterson D. The semiconductor supply chain: Assessing national competitiveness[M]. US: Center for Security and Emerging Technology, 2021. [2] 杨德振, 李凯峰, 蔡佳一, 等. 基于国产FPGA的红外图像处理算法实现[J]. 激光与红外, 2022, 52(08): 1223-1229. doi: 10.3969/j.issn.1001-5078.2022.08.019 Yang Dezhen, Li Kaifeng, Cai Jiayi, et al. Realization of infrared image processing based on domestic FPGA [J]. Laser & Infrared, 2022, 52(8): 1223-1229. (in Chinese) doi: 10.3969/j.issn.1001-5078.2022.08.019 [3] 王向军, 郭志翼. 算力限制平台下的长时目标跟踪[J]. 红外与激光工程, 2020, 49(01): 291-296. Wang Xiangjun, Guo Zhiyi. Long-term target tracking algorithms in force-constrained platform [J]. Infrared and Laser Engineering, 2020, 49(1): 0126003. (in Chinese) [4] 吴磊, 王永甲, 江先阳. 基于紫光现场可编程门阵列的无操作系统LwIP高效移植[J]. 计算机应用, 2021, 41(S2): 183-186. Wu Lei, Wang Yongjia, Jiang Xianyang. Efficient migration of LwIP without operating system based on Ziguang FPGA [J]. Journal of Computer Applications, 2021, 41(S2): 183-186. (in Chinese) [5] Przewlocka-Rus D, Kryjak T. Towards real-time and energy efficient siamese tracking–a hardware-software approach[C]//Design and Architecture for Signal and Image Processing: 15th International Workshop, 2022: 162-173. [6] Cui Z, An J. Heterogeneous siamese tracking system based on PYNQ framework[C]//2020 6th International Conference on Control, Automation and Robotics (ICCAR), IEEE, 2020: 16-20. [7] 陈方芳, 宋代平. 基于动态模板匹配的自适应尺度目标跟踪算法[J]. 激光与光电子学进展, 2022, 1-15 Chen Fangfang, Song Daiping. Adaptive scale target tracking algorithm based on dynamic template [J]. Laser & Optoelectronics Progress, 2023, 60(4): 0410018. (in Chinese) [8] 黄月平, 李小锋, 卢瑞涛, 等. 基于自适应标签和稀疏学习相关滤波的红外目标跟踪算法研究[J]. 仪器仪表学报, 2022, 1-10 Huang Yueping, Li XiaoFeng, Lu Ruitao, et al. Research on infrared object tracking algorithm via adaptive label and sparse-learning correlation filter [J]. Chinese Journal of Scientific Instrument, 2022, 43(12): 199-210. (in Chinese) [9] 张津浦, 王岳环. 融合检测技术的孪生网络跟踪算法综述[J]. 红外与激光工程, 2022, 51(10): 318-331. Zhang Jinpu, Wang Yuehuan. A survey of siamese networks tracking algorithm integrating detection technology [J]. Infrared and Laser Engineering, 2022, 51(10): 20220042. (in Chinese) [10] 吴晓军, 邹广华. 基于边缘几何特征的高性能模板匹配算法[J]. 仪器仪表学报, 2013, 34(07): 23-30. doi: 10.3969/j.issn.0254-3087.2013.07.004 Wu Xiaojun, Zou Guanghua. High performance template matching algorithm based on edge geometric features [J]. Chinese Journal of Scientific Instrument, 2013, 34(7): 23-30. (in Chinese) doi: 10.3969/j.issn.0254-3087.2013.07.004 [11] Kim J R, Jeon J W. Real-time scale and rotation invariant multiple template matching[C]//2022 16th International Conference on Ubiquitous Information Management and Communication (IMCOM), IEEE, 2022: 1-5. [12] Dekel T, Oron S, Rubinstein M, et al. Best-buddies similarity for robust template matching[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2015: 2021-2029. [13] Talmi I, Mechrez R, Zelnik-Manor L. Template matching with deformable diversity similarity[C]//Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, 2017: 175-183. [14] Cheng J, Wu Y, AbdAlmageed W, et al. QATM: Quality-aware template matching for deep learning[C]//Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2019: 11553-11562. -

 点击查看大图
点击查看大图

计量
- 文章访问数: 96
- HTML全文浏览量: 16
- PDF下载量: 45
- 被引次数: 0

