









-
随着光电技术的不断发展,激光探测技术近年来不断成熟[1]。相比其他探测手段,激光在军事、航空航天领域中有着独特的优势,目前已被广泛应用于探测、制导、遥测等领域[2]。通过激光扫描可获得高分辨率的角度信息与距离信息,这是传统成像探测手段所不及的[3];主动式单脉冲激光作用距离远、抗干扰性强,而其他探测手段易受环境、干扰等影响[4];激光脉冲扫描方式不仅有着高频、高分辨率的特点,还可与其他不同探测方式结合形成复合探测,以提升探测系统的抗干扰性,有着很好的应用前景[5]。
通常大型高速运动目标的尾焰辐射强度(W/sr)在上万瓦左右,而目标本体辐射强度在上百瓦,相差两个数量级,单一的红外成像很难实现尾焰抗干扰和本体识别[6],造成实际跟踪位置有所偏差。
为实现大型高速运动目标的精确探测,针对跟踪偏差情况,引入激光扫描复合探测,精确定位目标位置,考虑探测器相对目标飞行速度平均在1500 m/s以上,选择单脉冲式激光以提高主动激光高空作用距离到4 km以上,增加响应时间。同时,通过扫描扩大激光探测视场达2°(1°半视场)以上,设计脉冲频率和扫描算法,评估脉冲点和目标张角的密度和均匀度,以实现大视场目标搜索及不低于90%的目标探测效率。
利用扫描扩大激光脉冲作用范围是一种常用的研究方法[7],其中,1998年,Jahng等人[8]研究了激光雷达玫瑰线扫描模式的特点;2016年,Ansari等人[9]研究了激光雷达螺旋线扫描模式的特点;2020年,Wang等人[10]提出了激光雷达李萨如扫描模式的设计方法。激光雷达在目标探测领域也得到了发展与应用[11],然而未见提出匹配高速目标探测的激光雷达玫瑰扫描的设计方法。文中结合激光器、探测器、扫描系统等综合因素阐述了扫描探测设计的方法,可有效指导高速激光扫描的应用。
-
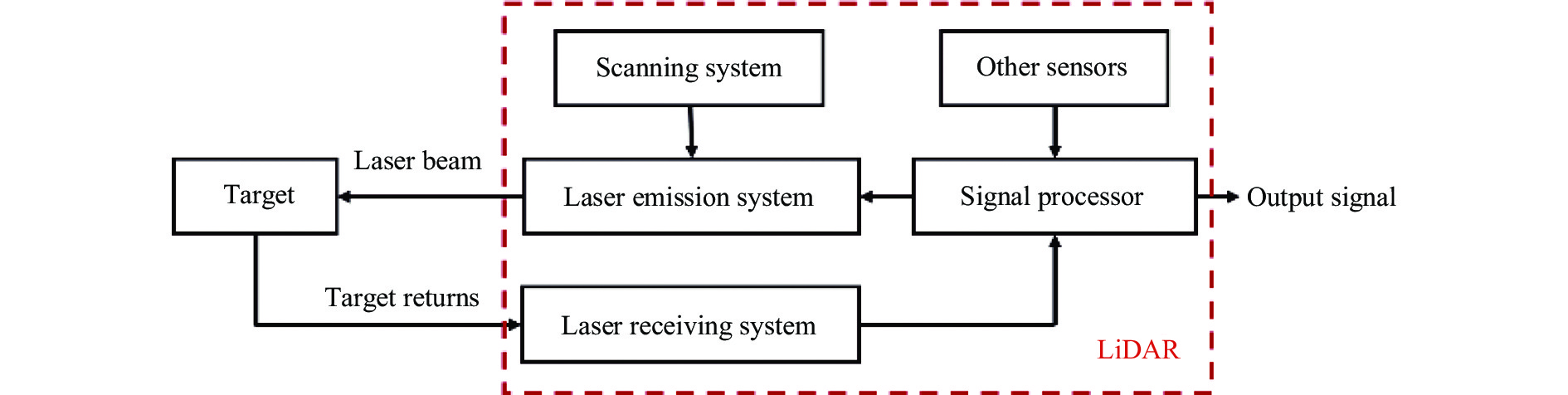
单脉冲激光探测系统由图1中红色虚线框内的部分组成,包括激光发射光学模块与接收光学模块、激光扫描机构与信号处理器。激光器通过发射光学模块发出高频脉冲,在目标处产生漫反射回波,再由接收光学模块汇聚回波来完成探测;扫描机构将发射光束按设计方式偏转运动,以完成二维扫描;信号处理器对接收信号进行处理,提取目标的具体信息。

图 1 激光探测系统原理图
Figure 1. Schematic diagram of laser detection system
根据小型化、低功耗和高频测量等基础需求,采用光纤激光器、高动态压电式扫描机构。光纤激光器通过降低束散角(即激光发散角不大于360 μrad),提高单脉冲发射峰值功率(不低于40 kW),以达到高空4 km以上的探测距离(采用APD探测器,灵敏度优于$ 3\times {10}^{-8}\;\mathrm{W} $),实现目标高速运动下2 s以上的探测响应时间。
为弥补上述激光发散角变小带来的激光探测视场的不足,利用扫描扩大视场,扫描器采用压电方式以达到足够的谐振频率,完成2°×2°(1°为机械行程,经光学反射后变为2°)的有效探测区域,探测区域采用20瓣以上玫瑰花瓣以充分覆盖视场,同时为匹配图像20 ms的更新周期,1°行程下扫描系统闭环带宽需要达到1 kHz(以一个周期一个花瓣为例),在此高速条件下,研究扫描轨迹均匀性和密度以实现目标高探测概率就尤为重要。
-
最大可探测距离是探测系统最重要的指标之一[12],基于此,系统会通过提高探测功率、牺牲探测视场来达到目的[13]。通过激光可类比微波雷达的作用距离方程来计算其探测距离[14],简化后方程为:
$$ {P}_{r}=\frac{{P}_{t}\sigma {D}^{2}{\tau }_{0}{\tau }_{a}}{16{\theta }_{T}^{2}{R}^{4}} $$ (1) 式中:$ {P}_{r} $为接收到的散射激光功率;$ {P}_{t} $为激光发射功率;$ {\theta }_{T} $为激光发散角;$ R $为目标到探测器的距离;$ \sigma $为目标的散射截面;$ D $为有效光学接收孔径;$ {\tau }_{0} $为双程光学透过率;$ {\tau }_{a} $为双程大气透过率。
公式(1)中的目标散射截面描述了目标对入射到其表面的激光的散射能力,可表示为:
$$ \sigma =\frac{4{\pi }}{\varOmega }{\rho }_{T}\mathrm{d}A $$ (2) 式中:$\varOmega$为目标的散射立体角;$ \;{\rho }_{T} $为目标的平均反射系数;$ \mathrm{d}A $为目标面积。
典型目标可分为点目标和面目标,依据激光光斑与目标投影面积的大小进行区分,当探测距离处的目标投影面积远大于激光光斑面积时,可将目标视为面目标。
对于朗伯散射面目标,其目标散射截面公式(2)可写为:
$$ \mathrm{\sigma }=\pi {\rho }_{A}{R}^{2}{\theta }_{T}^{2} $$ (3) 式中:$\;{\rho }_{A}$为目标面的平均反射系数。
将公式(3)代入公式(1),可得针对面目标的激光雷达作用距离方程为:
$$ {P}_{r}=\frac{\pi {P} _{t}{\rho }_{A}{D}^{2}{\tau }_{0}{\tau }_{a}}{16{R}^{2}} $$ (4) 分析可知,激光的发散角大小,即激光光斑大小,不会影响公式(4)的结果,这是因为发散角较小、光斑较小的情况下,全部的激光发射功率$ {P}_{t} $都在目标处发生散射。然而,当目标大小与光斑大小处于同一量级,不是典型的点目标或面目标时,可能仅有部分的激光光斑照射在目标上,形成回波。此时,需要依据激光的发散角、目标距离和激光光斑与目标的相对位置关系等参数才能计算出准确的回波能量。基于激光光源特性,激光光斑的能量分布为高斯分布,其功率密度分布的表达式为[14]:
$$ I=\frac{2}{1-{\rm e}^{-2}}\overline{I}\cdot {\rm e}^{-\frac{2{\theta }^{2}}{{\theta }_{T}^{2}}} $$ (5) 式中:$\overline{I}=\dfrac{{P}_{t}}{{S}_{d}}$为平均功率密度,$ {S}_{d} $为距离$ R $处的光斑面积;$ \theta $为目标与激光雷达连线和激光主光轴间的夹角。
激光的发射功率$ {P}_{t} $是功率密度$ I $的积分之和,可将公式(5)代入公式(4),得到基于激光能量分布的面目标激光雷达作用距离方程:
$$ {P}_{r}=\int \frac{1}{1-{\rm e}^{-2}}\cdot {\rm e}^{-\frac{2{\theta }^{2}}{{\theta }_{T}^{2}}}\frac{{P}_{t}{\rho }_{A}{D}^{2}{\tau }_{0}{\tau }_{a}}{2{\theta }_{T}^{2}{R}^{4}}\mathrm{d}\mathrm{\theta } $$ (6) 如图2所示,激光光斑与目标投影的大小相近,公式(6)的积分范围为目标投影与激光光斑的重叠区域。该积分表达式考虑了激光光斑的能量分布,仅重叠区域会发生散射,适用于更广泛的场景。

图 2 激光照射目标示意图,此时激光光斑与目标投影大小相当
Figure 2. Schematic diagram of target detected by laser. The size of the laser spot is close to the target projection area
根据上述设计,取发散角$ {\theta }_{T}=0.36\;\mathrm{m}\mathrm{r}\mathrm{a}\mathrm{d} $,在R=4 km处的激光光斑面积为${S} _{d}=1.61\;{\mathrm{m}}^{2}$。以某大型高速运动目标为例,目标长17 m,直径2 m,目标投影面积${S} _{t}=3.14\;{\mathrm{m}}^{2}$,远大于激光光斑,为面目标。根据公式(4)计算4 km作用距离下探测接收功率${{P}}_{{r}}$=5.625×10−8 W(取单脉冲的发射功率${{P}}_{{t}}=40\;\mathrm{k}\mathrm{W}$,目标的平均反射率$\; {\rho }_{A}=0.2 $),而APD前置放大电路最小接收功率为3.0×10−8 W,因此可实现4 km的探测距离。
目标发动机尾焰和目标本体存在一定距离,通常可达35 m以上,在考虑余量的基础上,设计扫描机构快反镜行程为1°,通过快反镜,扫描光路视场可覆盖2°×2°,半视场覆盖69.8 m,足以覆盖尾焰和本体长度。基于此,为弥补系统探测需求带来的短板,设计高速高精度扫描轨迹方案成为至关重要的一环。
-
通过二维光学扫描可以将激光的点探测能力拓展为面,所以激光雷达这样的点扫描式探测被称为亚成像探测[15]。激光雷达探测系统的扫描模式有光栅扫描、螺旋线扫描和玫瑰线扫描等,光栅扫描难以实现高帧频,螺旋线扫描分布不均匀,而玫瑰线扫描有着分布均匀、中心扫描密度大等优点,在高速目标探测中最为适合。扫描设计是将玫瑰线数学特性与频率、视场角等性能参数相结合,玫瑰线的极坐标表达形式为:
$$ {\rho}=a\times \mathrm{s}\mathrm{i}\mathrm{n}(k\theta +\gamma ) $$ (7) 式中:$ a $为玫瑰线叶子的半径;$ k $控制玫瑰线叶子的个数、单个叶子的重合率和闭合周期的长短;$ \gamma $为相位。
将公式(7)转化到直角坐标系中,形成适合二维扫描机构使用的信号,可表示为:
$$ \left\{\begin{array}{c}x=a\times \sin\left(2\pi {f}_{1}t\right)\times \cos\left(2\pi {f}_{2}t\right)\\ y=a\times \sin\left(2\pi {f}_{1}t\right)\times \sin\left(2\pi {f}_{2}t\right)\end{array}\right. $$ (8) 式中:$ {f}_{1} $和$ {f}_{2} $为单轴载波频率,且假设$ {f}_{1} $为其中较大的项。该直角坐标系表达式有如下数学性质:
1)当两频率项之和除以其最大公约数$\dfrac{{f}_{1}+{f}_{2}}{GCD({f}_{1},{f}_{2})}$为奇数时:扫描模式的帧频等于频率项$ {f}_{1} $和$ {f}_{2} $的最大公约数,即$F={G}{C}{D}({f}_{1},{f}_{2})$。玫瑰线的花瓣数等于两倍的$ {f}_{1} $除以两频率项的最大公约数$ F $,即$n = 2\times \dfrac{{f}_{1}}{{G}{C}{D}({f}_{1},{f}_{2})}$。$ {f}_{2} $越小,单个花瓣越瘦(重合率越小)。
2)当两频率项之和除以其最大公约数$\dfrac{{f}_{1}+{f}_{2}}{GCD({f}_{1},{f}_{2})}$为偶数时:扫描模式的帧频等于频率项$ {f}_{1} $和$ {f}_{2} $的最大公约数的二倍,即$F=2\times{G}{C}{D}({f}_{1},{f}_{2})$。玫瑰线的花瓣数等于$ {f}_{1} $除以两频率项的最大公约数$ F $,即$n = \dfrac{{f}_{1}}{GCD({f}_{1},{f}_{2})}$。$ {f}_{2} $越小,单个花瓣越瘦(重合率越小)。
扫描机构所能负载的载波频率应高于$ {f}_{1}+{f}_{2} $,在针对高速目标的探测中,扫描模式所需的高帧频对于扫描机构的动态性能提出了极高的要求。一般将$\dfrac{{f}_{1}+{f}_{2}}{{G}{C}{D}({f}_{1},{f}_{2})}$设计为奇数,对动态性能的要求更低。为符合多次扫描视场中心的要求,同时为减小数据处理算法的设计复杂度,玫瑰线的每个花瓣的端点都要落回视场中心处,所以一般来说公式中的相位项被取为零。
-
目前,激光扫描的精度和频率等特性普遍受扫描机构的能力约束[16],因此,高速、大带宽、大摆幅、强力学适应性(兼具刚度和柔性)的压电式扫描机构是基础条件。为完成高速探测的目的,在上述参数指标条件下,需要激光扫描达到最优设计模式。如图3所示,该模型覆盖了激光脉冲、目标和大气的参数,可计算出目标处于不同位置时被一个扫描视场周期所探测次数的矩阵。

图 3 计算最优扫描模式时所考虑的不同因素
Figure 3. Different factors considered when calculating the optimal scanning mode
定义激光雷达的探测矩阵E为:
$$ E=\sum f\left(g\right(S*T\left)*{P}_{i}\right) $$ (9) 式中:光斑矩阵S为激光器发射到目标平面上的激光光斑能量分布,由激光发散角、激光发射能量与目标距离等决定[17];目标矩阵T描述了目标投影面积的形状;扫描矩阵P记录了目标平面上沿玫瑰线扫描形成的一系列扫描点,而扫描点矩阵Pi则描述了扫描矩阵P中的单个扫描点,有$ P={\displaystyle\sum\nolimits }_{1}^{n}{P}_{i} $,其中n是一个视场周期内包含的扫描点数量。矩阵P由玫瑰线扫描参数与激光脉冲重复频率决定,矩阵中每一扫描点的横纵坐标可被描述为:
$$ \left\{\begin{array}{c}x=a\times {\sin}\left(2\pi {f}_{1}t\right)\times {\cos}\left(2\pi {f}_{2}t\right)\times \delta (m/{f}_{rep})\\ y=a\times \sin\left(2\pi {f}_{1}t\right)\times \sin\left(2\pi {f}_{2}t\right)\times \delta (n/{f}_{rep})\end{array}\right.$$ (10) 式中:$ {f}_{rep} $为脉冲重复频率;m和n均为正整数。图4为在目标平面上光斑矩阵S、目标矩阵T和扫描矩阵P的图示。接收功率函数$ g\left(x\right) $同公式(6),可计算激光接收功率大小。阈值函数$ f\left(x\right)=\left\{\begin{array}{c}0,x < K\\ 1,x\geqslant K\end{array}\right. $,K为探测器APD的灵敏度。

图 4 最优扫描模式计算理论的示意图。描述了目标矩阵T、光斑矩阵S和扫描矩阵P在目标平面上的关系,描述了发射脉冲到目标平面并探测回波的探测过程
Figure 4. Schematic diagram of the theory of optimal scanning mode calculation. The relationship between target matrix T, spot matrix S and scanning path matrix P on the target projection plane is shown. The detection process of laser pulse to the target plane is also described
将光斑矩阵S与目标矩阵T的卷积代入函数$ g\left(x\right) $,计算目标距光斑不同距离时接收功率的大小。再与扫描矩阵Pi卷积,则可以得到对于矩阵Pi所描述的单个扫描点来说目标处于平面上不同位置时的激光接收功率。再将上述卷积代入$ f\left(x\right) $进行阈值判断,以探测器APD的灵敏度为阈值进行二值化,判断散射产生的功率可否被接收探测。最后,对周期内所有扫描点矩阵Pi求和,得到探测矩阵E。矩阵E中的一个元素代表当目标处于该位置时,一个扫描周期内被脉冲点探测的次数。
玫瑰线的一个闭合扫描周期内有上百个扫描点,在这个周期内,目标会被这些激光光斑分别照射,散射产生的回波功率依据光斑与目标的覆盖率变化。当矩阵E中的元素值大于等于1,该位置被定义为可探测区域;而当元素值为0,代表光斑未照射到目标,即接收到的回波功率低于APD探测器灵敏度时,该处可视为扫描盲区。当目标处于激光光斑密集的区域时,如玫瑰线扫描视场的中心处,会被多次探测[18]。根据探测矩阵E的元素大小,能够计算出视场内的可探测区域占比。
为更好地描述玫瑰线扫描模式的分布均匀性,定义盲区到扫描可探测区域的最短距离为BDD (Blind-spot-to-Detectable-area Distance)。如图5所示,红点为扫描模式下的一个盲点,黑色箭头表示了由盲点到可探测区域的最短距离。通过计算所有盲点的BDD,统计其距离大小的最大值、均方根,可以直观地衡量最大连续盲区的大小和盲区大小的均匀性。

图 5 盲点到可探测区域的最短距离BDD的示意图,图中红点为盲点,箭头表示盲点BDD的大小
Figure 5. Schematic diagram of the shortest distance BDD from blind spot to detectable area. The red points denote the blind spot of the pattern, and the black arrows are the BDDs of the blind spots
针对玫瑰线扫描模式的设计优化,要求探测概率高、可探测区域占比大、BDD的统计值要小,同时要求视场中心的重复频率较高,以此为据可选择出最优的玫瑰线扫描参数。
-
根据上述理论分析,引入探测设计参数仿真并实验计算,选取最优扫描轨迹设计参数。
激光器单脉冲发射峰值功率为40 kW,重复频率为40 kHz,在系统信噪比1.6以上可实现4 km距离可靠探测,而40 kHz重频可实现单次视场覆盖800个脉冲点。扫描机构采用1000 Hz闭环带宽,视场中心处重复频率可达1000次/s。
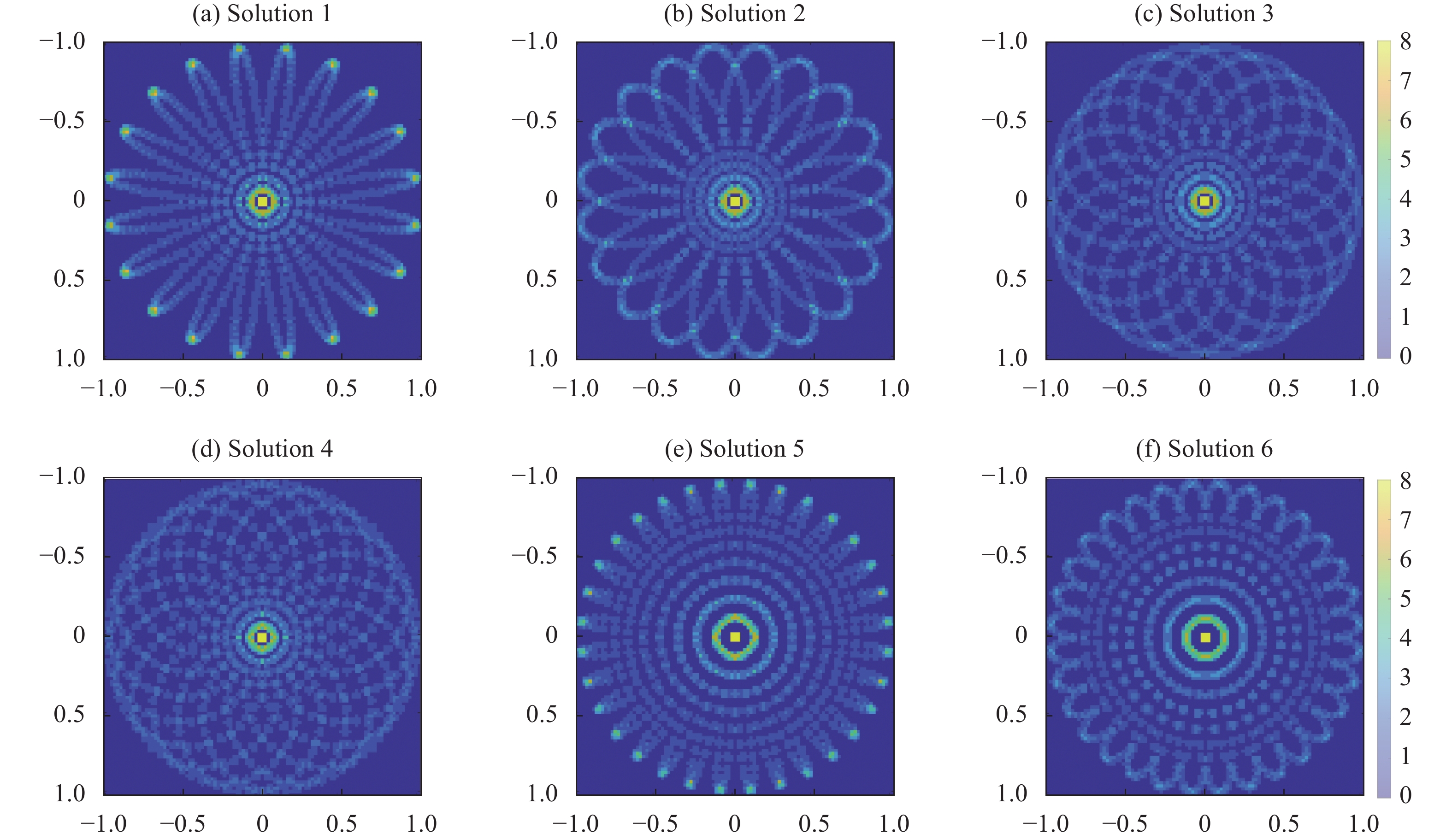
为保证每秒至少有50个视场刷新周期,帧频$F={G}{C}{D}\left({f}_{1},{f}_{2}\right)=50$。由于每个周期有800个激光光斑,所以玫瑰线的叶片数n应是800的因数(即${n}= \mathrm{16,20,32,40}$等),以保证激光光斑能够落回到视场的正中心。结合1000次的视场中心刷新率,选取单次视场覆盖20个以上玫瑰花瓣(每个花瓣为执行机构单次运行周期)。基于公式(8)所描述的玫瑰线公式,设计6组符合指标的玫瑰线参数,分别为方案一:${f}_{1}= 500\;\mathrm{H}\mathrm{z}$,${f}_{2}=50\;\mathrm{H}\mathrm{z}$;方案二:${f}_{1}=500\;\mathrm{H}\mathrm{z}$,${f}_{2}= 150\;\mathrm{H}\mathrm{z}$;方案三:${f}_{1}=500\;\mathrm{H}\mathrm{z}$,${f}_{2}=350\;\mathrm{H}\mathrm{z}$;方案四:${f}_{1}=500\;\mathrm{H}\mathrm{z}$,${f}_{2}=450\;\mathrm{H}\mathrm{z}$;方案五:${f}_{1}=800\;\mathrm{H}\mathrm{z}$,${f}_{2}= 50\;\mathrm{H}\mathrm{z}$;方案六:${f}_{1}=800\;\mathrm{H}\mathrm{z}$,${f}_{2}=150\;\mathrm{H}\mathrm{z}$。依据玫瑰线的特性,这六种扫描模式均能保证50 Hz的视场刷新率,方案一~四每周期有20个玫瑰叶,方案五和方案六每周期有32个玫瑰叶,视场中心重复频率均大于1000 次/s。这些方案的扫描矩阵P如图6所示。

图 6 (a)~(f) 不同方案的扫描矩阵P。图中玫瑰线半径做了归一化处理,并画出了扫描轨迹。激光的重复频率为40 kHz,即一个周期的玫瑰线含800个扫描点
Figure 6. (a)-(f) Scanning path matrix P for different solutions. The radius of the rosette pattern is normalized and the scanning track is drawn. The repetition frequency of the laser is 40 kHz, that is, there are 800 scanning points in one period
以上述大型高速目标为例,严苛条件下,目标倾角为30°,其在扫描视场内的投影为17×sin30°=8.5 m,扫描视场内张角为0.12°,如图6所示,图(a)~(f)中脉冲点最大张角(涵盖横向和纵向张角)依次是0.17°、0.19°、0.13°、0.09°、0.11°,0.11°。统计图(a)~(f)每幅图相邻脉冲点张角小于0.12°的个数,可得单次视场刷新下,每幅图依次有703、664、762、800、800、800个。从单次视场探测率来说,依次为87.8%、83%、95.2%、100%、100%、100%。以目标2 m直径为例,极限状态下迎头或尾追探测,目标探测投影直径仅有2 m,投影在扫描视场上的张角为0.028°,在此条件下,计算图7中探测矩阵E不同元素的BDD (即以脉冲点为圆心,半径1 m画圆,相邻三个脉冲点内的盲点到圆弧距离的平均值),结果如图8所示,可以看到绝大部分的盲点处于探测视场的外围区域。

图 7 (a)~(f) 不同方案的玫瑰线扫描可探测矩阵E (图中玫瑰线半径做了归一化处理)
Figure 7. (a)-(f) Detection matrix E of rosette scanning for different solutions (The radius of the rosette pattern is normalized)

图 8 六个方案对应的探测矩阵E的盲点到可探测区域距离BDD的统计
Figure 8. Statistics of the blind spot to detectable area distance BDD of the detection matrix E corresponding to the six schemes
对六组方案的载波频率、单次视场探测率、极限可探测区域占比以及BDD进行统计,如表1所示。方案一~四的扫描花瓣为20个,而方案五和方案六为32个,与玫瑰线叶片数相对应。方案四~六均可实现单次视场更新下100%的目标探测概率,而方案五和方案六分散于外围的扫描点更加稀疏,极限可探测区域占比更小,且方案六对扫描机构负荷最大,方案一和方案二的BDD统计值都较大,代表它们有着更大、更不均匀的盲区;方案四的BDD统计值最小,代表该扫描模式的盲区最小、分布最为均匀。
表 1 六种方案的优劣对比
Table 1. Comparison of six different solutions
Solution 1 Solution 2 Solution 3 Solution 4 Solution 5 Solution 6 (f1, f2)/Hz (500, 50) (500, 150) (500, 350) (500, 450) (800, 50) (800, 150) Carrier frequency/Hz 550 650 850 950 850 950 Center repetition frequency/Hz 20 20 20 20 32 32 Maximum opening angle/(°) 0.17 0.19 0.13 0.09 0.11 0.11 Single-shot field detection rate (0.12°) 87.8% 83% 95.2% 100% 100% 100% Detectable area ratio (0.028°) 37.85% 40.93% 47.49% 55.34% 48.29% 50.82% BDD max 5.83 4.47 3.16 3 3.61 3 BDD rms 1.94 1.79 1.43 1.26 1.39 1.35 综上所述,表1中方案四,即取${{f}}_{1}=500\;\mathrm{H}\mathrm{z}$,${{f}}_{2}= 450\;\mathrm{H}\mathrm{z}$为最优方案,单次视场更新下可实现目标100%的探测反馈,扫描点分布均匀,极限迎头或尾追情况下,可探测区域占比最高为55.34%,且BDD的统计值也最小,具备可靠探测高速目标的能力。
-
文中基于高速目标精确扫描探测的需求,设计了激光脉冲远距离、高频率、高探测概率扫描应用系统,结合激光器、探测器、目标特性、扫描系统等综合参数,优化了目标探测系统模型以及匹配高速目标探测的激光脉冲最优扫描算法方案。通过扫描将激光光学探测视场扩大到2°(1°机械行程),分析了1000 Hz扫描闭环带宽以及50 Hz视场刷新率下扫描轨迹的快速性、均匀性、高覆盖率等指标,实现在高空4 km远距离激光目标本体探测下,单次视场(匹配20 ms图像周期)100%探测概率反馈,完成了极限探测条件下(迎头或尾追)可探测区域占比55.34%,并进行BDD指标定量评估(即有效探测区域外盲点距离更近,脉冲点更均匀、密度更高),充分验证了最优扫描模式下具备良好的高速目标探测性能(并非不可实现),可有效指导高速目标扫描探测的实际应用。
Pulsed laser scanning design technology under high-speed target detection
-
摘要: 为解决高速目标强尾焰弱本体精确探测问题,设计了单脉冲式激光玫瑰扫描系统。针对时间响应需求,设计高峰值功率和微小激光束散角,实现主动激光高空4 km以上的远距离探测,同时为弥补束散角不足,设计高动态压电式扫描机构行程以扩大激光探测视场达2°(1°行程)以上,并研究高速脉冲频率和扫描轨迹算法,评估目标在扫描投影视场内张角以及激光脉冲点张角的密度和均匀度,达到不低于1000 Hz的扫描闭环带宽和50 Hz的视场刷新率,实现高速目标单次视场刷新下100%的探测概率反馈,突破极限探测条件下(迎头或尾追)可探测区域占比55%以上,完成目标真实位置、角度回告,达到了精确瞄准目标本体的目的,验证了高速目标探测的可实现性,对高速目标末端精确探测的应用具有重要的意义。Abstract:
Objective The tail flame radiation intensity (W/sr) of large high-speed moving targets is about tens of thousands of watts, while the radiation intensity of the target body is hundreds of watts, a difference of two orders of magnitude, and it is difficult for a single infrared imaging to achieve tail flame anti-interference and body identification, which in turn causes deviation in tracking position. In order to solve the accurate detection of the strong tail flame and weak body of high-speed targets, the laser scanning composite mode is introduced to accurately locate the target position according to the tracking deviation. Based on this, in order to make up for the shortcomings caused by the system detection requirements, the design of high-speed and high-precision scanning trajectory schemes has become a crucial part. Since the existing research has not proposed a design method for lidar rose scanning to match high-speed target detection, it is particularly important to design scanning algorithms and study trajectory uniformity and density to achieve high detection probability of targets under these high-speed conditions, which can effectively guide the application of high-speed laser scanning. Methods A single-pulse laser rose scanning system is constructed (Fig.1). The single-pulse laser detection system reduces the beam scattering angle (not more than 360 μrad) and increases the peak power of the transmission to achieve a detection distance of more than 4 km at a high altitude (APD detector sensitivity is better than 3×10−8 W), and achieve a detection response time of more than 2 s under high-speed movement of the target (Fig.2). At the same time, in order to make up for the lack of laser detection field of view caused by the smaller beam scattering angle, the scanning field is expanded by scanning, the piezoelectric method is used to achieve sufficient resonant frequency, the effective detection area of 2°×2° is completed, the pulse frequency and scanning algorithm are designed, and the density and uniformity of the pulse point and target opening angle are evaluated (Fig.3) to achieve target search with a large field of view and no less than 90% of the target detection efficiency (Fig.4). Blind-spot-to-detectable-area distance (BDD) is introduced to calculate its maximum value and rms to visually measure the size, uniformity of the continuous blind zone and proportion of the detection area (Fig.5), and realize the optimal design of the rose line scanning mode. Results and Discussions Probing design simulation is used to calculate the optimal sweep parameters through experiments. The scanning trajectory f1=500 Hz, f2=450 Hz, the peak power of laser single pulse emission is 40 kW, the repetition rate is 40 kHz, and the single field of view covers 20 rose leaves and 800 pulse points. The scanning closed-loop bandwidth is 1000 Hz, the field center repetition rate can reach 1000 times per second, and there are at least 50 field refresh cycles per second (Fig.6). In the optimal scanning mode, the BDD statistic is the smallest, the continuous dead zone is the smallest, and most of the blind spots are in the peripheral area of the detection field of view (Fig.7-8). Under a single field of view update, 100% detection probability feedback can be achieved, the scanning point distribution is uniform, the maximum proportion of detectable area is 55.34%, and the minimum BDD is 1.26 (Tab.1), which has the ability to reliably detect high-speed targets. Conclusions In this study, a laser pulse long-range, high-frequency, high-probability scanning application system is designed, and the target detection system model and the optimal scanning algorithm scheme of laser pulse matching high-speed target detection are optimized. High peak power and small laser beam scattering angle are designed to achieve active laser long-distance detection at a high altitude of more than 4 km. The highly dynamic piezoelectric scanning mechanism stroke is designed to expand the laser detection field of view by more than 2°. Research on high-speed pulse frequency and sweep trajectory algorithms is conducted. The density, uniformity and coverage of the laser pulse point opening angle and the target opening angle in the scanning projection field of view are evaluate. A scanning closed-loop bandwidth of not less than 1000 Hz and a field of view refresh rate of 50 Hz (matching 20 ms image cycle) are achieved. The 100% detection probability feedback under a single field of view refresh of high-speed targets is realized. The detectable area under the condition of breaking through the limit detection (head-on or tail chase) accounts for more than 55%, the quantitative evaluation of BDD index was carried out, which achieved the purpose of accurately aiming at the target body, completed the real position and angle feedback of the target, and verified the achievability and good detection performance of high-speed target detection. -
Key words:
- pulse scanning /
- high-speed detection /
- body recognition /
- detection efficiency
-
图 2 激光照射目标示意图,此时激光光斑与目标投影大小相当
Figure 2. Schematic diagram of target detected by laser. The size of the laser spot is close to the target projection area
图 3 计算最优扫描模式时所考虑的不同因素
Figure 3. Different factors considered when calculating the optimal scanning mode
图 4 最优扫描模式计算理论的示意图。描述了目标矩阵T、光斑矩阵S和扫描矩阵P在目标平面上的关系,描述了发射脉冲到目标平面并探测回波的探测过程
Figure 4. Schematic diagram of the theory of optimal scanning mode calculation. The relationship between target matrix T, spot matrix S and scanning path matrix P on the target projection plane is shown. The detection process of laser pulse to the target plane is also described
图 5 盲点到可探测区域的最短距离BDD的示意图,图中红点为盲点,箭头表示盲点BDD的大小
Figure 5. Schematic diagram of the shortest distance BDD from blind spot to detectable area. The red points denote the blind spot of the pattern, and the black arrows are the BDDs of the blind spots
图 6 (a)~(f) 不同方案的扫描矩阵P。图中玫瑰线半径做了归一化处理,并画出了扫描轨迹。激光的重复频率为40 kHz,即一个周期的玫瑰线含800个扫描点
Figure 6. (a)-(f) Scanning path matrix P for different solutions. The radius of the rosette pattern is normalized and the scanning track is drawn. The repetition frequency of the laser is 40 kHz, that is, there are 800 scanning points in one period
图 7 (a)~(f) 不同方案的玫瑰线扫描可探测矩阵E (图中玫瑰线半径做了归一化处理)
Figure 7. (a)-(f) Detection matrix E of rosette scanning for different solutions (The radius of the rosette pattern is normalized)
图 8 六个方案对应的探测矩阵E的盲点到可探测区域距离BDD的统计
Figure 8. Statistics of the blind spot to detectable area distance BDD of the detection matrix E corresponding to the six schemes
表 1 六种方案的优劣对比
Table 1. Comparison of six different solutions
Solution 1 Solution 2 Solution 3 Solution 4 Solution 5 Solution 6 (f1, f2)/Hz (500, 50) (500, 150) (500, 350) (500, 450) (800, 50) (800, 150) Carrier frequency/Hz 550 650 850 950 850 950 Center repetition frequency/Hz 20 20 20 20 32 32 Maximum opening angle/(°) 0.17 0.19 0.13 0.09 0.11 0.11 Single-shot field detection rate (0.12°) 87.8% 83% 95.2% 100% 100% 100% Detectable area ratio (0.028°) 37.85% 40.93% 47.49% 55.34% 48.29% 50.82% BDD max 5.83 4.47 3.16 3 3.61 3 BDD rms 1.94 1.79 1.43 1.26 1.39 1.35  下载: 导出CSV
下载: 导出CSV
-
[1] Stone W, Juberts M, Dagalakis N, et al. Performance analysis of next-generation LIDAR for manufacturing, construction, and mobility[R]. Gaithersburg, MD, US: Natl Inst Stand Technol, 2004. [2] Khan M U, Zaidi S A A, Ishtiaq A, et al. A comparative survey of LiDAR-SLAM and LiDAR based sensor technolo-gies[C]//2021 Mohammad Ali Jinnah University International Conference on Computing (MAJICC), 2021: 1-8. [3] 罗栋. 基于MEMS微镜扫描的三维激光雷达样机系统设计[D]. 华中科技大学, 2019. Luo Dong. Prototype design of 3D lidar system based on MEMS mirror scanning[D]. Wuhan: Huazhong University of Science and Technology, 2019. (in Chinese) [4] Jahng S G, Hong H K, Han S H, et al. Design of instantaneous field of view of the rosette scanning infrared seeker and dynamic simulation[C]//Acquisition, Tracking, and Pointing XII, SPIE, 1998: 3365-3374. [5] Lu Yafei, Zhou Yuan, Hei Mo, et al. Frame frequency prediction for Risley-prism-based imaging laser radar [J]. Appl Opt, 2014, 53(16): 3556-3564. doi: 10.1364/AO.53.003556 [6] Ansari Z A, Kumar A, Marathe R, et al. Spiral scan pattern generation for laser spot tracker[C]//4th IFAC Conf Adv Control and Optim Dyn Syst, 2016, 49(1): 112-117. [7] 李文通, 丁雯, 朱牧. 复杂背景下玫瑰扫描红外探测系统作用距离评估方法[J]. 红外与激光工程, 2017, 46(10): 1004002. doi: 10.3788/IRLA201746.1004002 Li Wentong, Ding Wen, Zhu Mu. Method for estimating operating distance of Rosette scan infrared detection system under complex background [J]. Infrared and Laser Engineering, 2017, 46(10): 1004002. (in Chinese) doi: 10.3788/IRLA201746.1004002 [8] 吕银环. 防护罩气动热效应对玫瑰扫描系统的影响仿真分析[J]. 红外与激光工程, 2020, 49(7): 20190520. doi: 10.3788/IRLA20190520 Lv Yinhuan. Simulation analysis of influence of aerodynamic heating effect of dome window on rosette scan system [J]. Infrared and Laser Engineering, 2020, 49(7): 20190520. (in Chinese) doi: 10.3788/IRLA20190520 [9] Wang Junya, Zhang Gaofei, You Zheng. Design rules for dense and rapid Lissajous Scanning [J]. Microsyst Nanoeng, 2020, 6: 101. doi: 10.1038/s41378-020-00211-4 [10] Stann B L, Dammann J F, Giza M M. Progress on MEMS-scanned ladar[C]//Laser Radar Technol Appl XXI, 2016, 9832: 98320L. [11] Song Sheng, Xu Weiming, Shu Rong. Design and imple-mentation of infrared/laser dual-mode compound detection system [J]. Aerosp Syst, 2020, 3: 157-166. doi: 10.1007/s42401-020-00054-x [12] Li Qingyan, Yang Yafei, Yan Shiyu, et al. Real-time variable field-of-view scanning of LiDAR by controlling the drive voltage of MEMS micromirror [J]. Optik, 2021, 246: 167760. doi: 10.1016/j.ijleo.2021.167760 [13] Butrimas S, Driggers R G, Halford C, et al. Pulse visibility factor and its impact on infrared search and track systems [J]. Opt Eng, 2019, 58(7): 073105. doi: 10.1117/1.OE.58.7.073105 [14] 戴永江. 激光雷达技术[M]. 北京: 电子工业出版社, 2010. [15] 程鹏飞. 大动态范围高精度激光测距关键技术研究[D]. 中国科学院上海技术物理研究所, 2014. Cheng Pengfei. Research of key technologies of wide dynamic range and high precision laser distance measurement[D]. Shanghai: Shanghai Insitute of Technical Physics, Chinese Academy of Sciences, 2014. (in Chinese) [16] 赵浩光, 曲涵石, 王鑫. 高速微扫描图像超分辨重建[J]. 光学精密工程, 2021, 29(10): 2456-2464. doi: 10.37188/OPE.20212910.2456 Zhao Haoguang, Quhanshi, Wang Xin. Super-resolution recon-struction of micro-scanning images [J]. Optics and Precision Engineering, 2021, 29(10): 2456-2464. (in Chinese) doi: 10.37188/OPE.20212910.2456 [17] 张新荣, 王鑫, 王瑶, 向高峰, 基于转动式二维激光扫描仪和多传感器的三维重建方法[J] 中国光学, 2023, 16(3): 663. doi: 10.37188/CO.2022-0159 Zhang Xinrong, Wang xin, Wangyao, et al. 3D reconstruction method based on rotating 2D laser scanner and multi-sensor [J]. Chinese Optics., 2023, 16(3): 663. (in Chinese) doi: 10.37188/CO.2022-0159 [18] 杜达宽, 孙剑峰, 丁源雪, 姜鹏, 等. 基于GM-APD激光雷达数据融合的小目标检测[J]. 光学精密工程, 2023, 31(3): 393-403. doi: 10.37188/OPE.20233103.0393 Du Dakuang, Sun Jianfeng, Ding Yuanxue, et al. Small object detection based on GM-APD lidar data fusion [J]. Optics and Precision Engineering, 2023, 31(3): 393-403. (in Chinese) doi: 10.37188/OPE.20233103.0393 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 77
- HTML全文浏览量: 10
- PDF下载量: 27
- 被引次数: 0

