









-
由于在测量精度、测量范围和便携性等方面具有明显优势,激光跟踪仪在粒子加速器准直工程[1-2]和大尺度工业测量[3−4]等精密测量领域中起着不可替代的作用。因为激光跟踪仪的测距误差远小于其测角误差[5−6],可以采用多台激光跟踪仪组成一个测量系统[7],只使用其中的边长观测值解算目标点的三维坐标。该系统舍弃精度较低的角度测量值,能够得到高精度的坐标测量值。
在建立多台激光跟踪仪测量系统时,需要进行自标定过程,即确定不同激光跟踪仪仪器中心之间的距离,才能进一步测量目标点的三维坐标。张国雄等[8−9]率先对基于相对距离的四路激光跟踪系统展开自标定和布局相关方面的研究,该研究不适用于目前广泛使用的绝对测距激光跟踪仪,在应用上具有一定的局限性。胡进忠等[10−11]建立了基于绝对测距式激光跟踪仪的多边测量系统,并证明直角正四面体布局是该坐标测量系统的最佳布局,该理论在文献[12]也有体现。
一种常见的自标定方法是两台仪器通过测量公共点,使用边长观测值反算出仪器中心之间的距离[7]。该方法虽然能实现较高的精度,但是测量若干公共点的过程显著增加工作量,在粒子加速器隧道等通视条件不好的情况下,公共点的布局和观测也存在诸多限制[13]。相较基于公共点方法而言,基于球面拟合的方法的测量效率更高。其具体流程为:将带靶球的夹具固定在目标激光跟踪仪上,转动目标仪器的同时使用照准激光跟踪仪观测,得到不同位置的靶座坐标,进行球面拟合,通过球心坐标反算出两个激光跟踪仪中心的距离[14]。该方法无需公共点,操作便捷,对测量环境的要求不高,然而该方法需要使用照准激光跟踪仪上精度较低的角度观测值,并且距离越远,角度误差带来的影响越大。实验中与标准尺的绝对偏差大于20 μm,难以满足加速器准直测量工程中微米量级精度的需求,因此该方法在应用中具有一定局限性。
为了解决基于球面拟合的自标定方法精度不高的问题,文中提出了一种基于三角形结构的高精度激光跟踪仪自标定方法。该方法使用带有靶座的目标跟踪仪角度测量值,配合照准激光跟踪仪的高精度距离观测值,通过三角形的结构建立非线性平差模型,迭代求解得到高精度的自标定距离。最后通过二维模拟实验和三维实测实验与基于球面拟合的方法进行比较,验证了文中算法的精度方面具有明显的优势。
-
激光跟踪仪具有偏摆和俯仰两个互相正交的转轴,两个转轴交点就是激光跟踪仪的中心点。基于该正交结构,何俊等[14]设计了一个带有螺纹靶座的夹具固定在目标激光跟踪仪上,夹具上面的靶球在以目标激光跟踪仪中心为球心的球面上运动。另一台照准激光跟踪仪观测靶球得到其坐标,通过球面拟合算法实现两台激光跟踪仪的自标定。
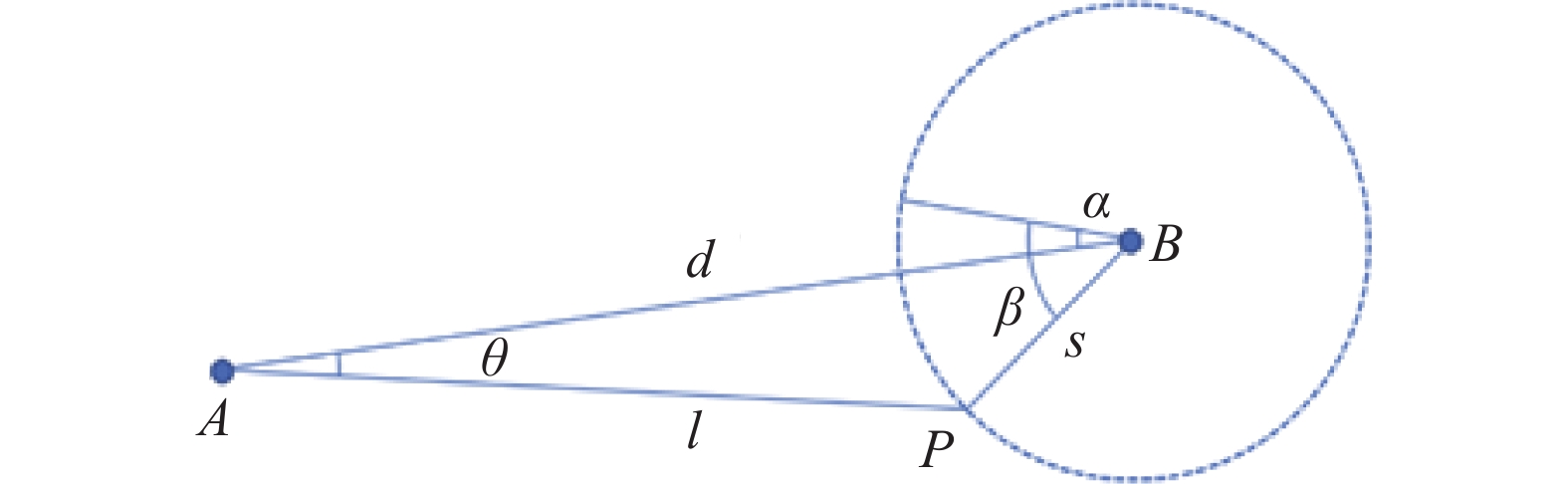
对该模型进行简化,分析其自标定过程的误差影响因素。假设照准跟踪仪$A$和目标跟踪仪$B$处于同一平面,其俯视图如图1所示,仪器$B$上靶座记为$P$。$AB$、$AP$和$BP$之间的距离分别记作$d$、$l$和$s$。激光跟踪仪$B$只旋转其竖轴,固定在仪器上的靶座$P$在一个圆上运动。照准激光跟踪仪通过测量长度$l$和角度$\theta = \angle BAP$,转换得到$P$的坐标。转动竖轴得到若干个靶座的坐标,通过圆拟合算法[15]得到仪器$B$中心点坐标,进而计算出自标定的估计值$\hat d$。

图 1 二维空间自标定示意图
Figure 1. Diagram of the self-calibration in 2D space
假设两台激光跟踪仪的距离$d = 5\;{\text{m}}$,激光跟踪仪的距离角度误差分别为0.5 μm/m和$1.6''$,距离和角度观测值对$P$点的误差分别为2.5 μm和36.3 μm,符合激光跟踪仪测距误差远大于测角误差的特点。受到测角误差的影响,$P$点的不确定度大于30 μm。该角度带来的误差会累积到后续流程中,导致其精度远低于基于公共点的自标定方法。
-
上述过程分析了基于球心标定方法的主要误差来源。两台激光跟踪仪自标定的过程和一般的球面拟合[16]有所不同,除了照准跟踪仪$A$有距离和角度观测值,目标跟踪仪$B$也存在角度观测值,如图1中$BP$方向和初始方向的夹角$\beta $。若使用观测值$l$和$\beta $进行标定,定性分析其误差情况。$BP$的距离较短,如$s = 0.2{\text{ m}}$,对应角度$\beta $对$P$点造成的误差为1.5 μm。将角度观测值$\beta $结合高精度的距离测量值$l$进行数据处理,能够有效减小$P$点的定位误差。需要注意的是,文中关注的是高精度标定两台激光跟踪仪的距离$d$,因此没必要求出$P$点的具体坐标。下面将通过三角形的结构关系建立函数模型进行自标定。
-
边长观测值$l$和角度观测值$\beta $在三角形$APB$中满足余弦定理,该三角形结构提供了多余观测,由此建立函数模型。由于初始方向可能不完全指向仪器$A$,存在一个很小的偏差$\alpha $,那么余弦定理可以表达为:
$$ {l^2} - {d^2} - {s^2} + 2sd\cos \left( {\beta - \alpha } \right) = 0 $$ (1) 式中:$l$和$\beta $为观测值;$d$、$s$和$\alpha $为待估参数。若长度$s$提前标定得到,那么将视为一个已知值,下述分析依旧将其视为未知量进行平差。
该模型待估参数的数量为3,需观测$n > 3$组边角观测值$\left( {{l_i},{\beta _i}} \right)\left( {i = 1,2, \cdots ,n} \right)$组成观测向量$ {\boldsymbol{y}} = {\left[ {\begin{array}{*{20}{c}} {{l_1}}&{{l_2}}& \cdots &{{l_n}}&{{\beta _1}}&{{\beta _2}}& \cdots &{{\beta _n}} \end{array}} \right]^{\text{T}}} $,待估参数组成向量$ {\boldsymbol{x}} = {\left[ {\begin{array}{*{20}{c}} d&s&\alpha \end{array}} \right]^{\text{T}}} $,那么考虑到${\boldsymbol{y}}$对应的观测误差${\boldsymbol{e}}$,根据公式(1)建立非线性高斯赫尔默特模型:
$$ {\boldsymbol{f}}\left( {{\boldsymbol{e}},{\boldsymbol{x}}} \right) = {\boldsymbol{g}}\left( {{\boldsymbol{y}} - {\boldsymbol{e}},{\boldsymbol{x}}} \right) = {\boldsymbol{0}} $$ (2) 其中,观测值的随机模型为:
$$ {\boldsymbol{e}}\sim N\left( {{\boldsymbol{0}},\sigma _0^2{\boldsymbol{Q}}} \right) $$ (3) 式中:$ \sigma _0^2 $为单位权方差;$ {\boldsymbol{Q}} $为观测值的协因数矩阵。公式(2)在${{\boldsymbol{e}}^0}$和${{\boldsymbol{x}}^0}$进行泰勒展开,得到线性化后的误差模型[17]:
$$ {\boldsymbol{Ae}} + {\boldsymbol{B}}{\text{d}}{\boldsymbol{x}} + {\boldsymbol{w}} = {\boldsymbol{0}} $$ (4) 式中:矩阵和向量的表达式具体为$ {\boldsymbol{A}} =\left. \dfrac{{\partial {\boldsymbol{f}}}}{{\partial {{\boldsymbol{e}}^{\text{T}}}}}\right| {_{{{\boldsymbol{e}}^0},{{\boldsymbol{x}}^0}}} $;$ {\boldsymbol{B}} =\left. \dfrac{{\partial {\boldsymbol{f}}}}{{\partial {{\boldsymbol{x}}^{\text{T}}}}}\right| {_{{{\boldsymbol{e}}^0},{{\boldsymbol{x}}^0}}} $;$ {\boldsymbol{w}} = {\boldsymbol{f}}\left( {{{\boldsymbol{e}}^0},{{\boldsymbol{x}}^0}} \right) - {\boldsymbol{A}}{{\boldsymbol{e}}^0} $。通过拉格朗日乘数法,在最小二乘准则下求得待估参数的改正数$ {\text{d}}{\boldsymbol{\hat x}} $和残差向量估计值$ {\boldsymbol{\hat e}} $分别为[18−20]:
$$ {\text{d}}{\boldsymbol{\hat x}} = {\left( {{{\boldsymbol{B}}^{\text{T}}}{{\left( {{\boldsymbol{AQ}}{{\boldsymbol{A}}^{\text{T}}}} \right)}^{ - 1}}{\boldsymbol{B}}} \right)^{ - 1}}{{\boldsymbol{B}}^{\text{T}}}{\left( {{\boldsymbol{AQ}}{{\boldsymbol{A}}^{\text{T}}}} \right)^{ - 1}}{\boldsymbol{w}} $$ (5) $$ {\boldsymbol{\hat e}} = {\boldsymbol{Q}}{{\boldsymbol{A}}^{\text{T}}}{\left( {{\boldsymbol{AQ}}{{\boldsymbol{A}}^{\text{T}}}} \right)^{ - 1}}\left( {{\boldsymbol{w}} - {\boldsymbol{B}}{\text{d}}{\boldsymbol{\hat x}}} \right) $$ (6) 该模型是一个非线性模型,因此需要进行迭代求解。每次迭代中待估参数向量通过$ {\boldsymbol{x}}_{i + 1}^0 = {\boldsymbol{x}}_i^0 + {\text{d}}{\boldsymbol{\hat x}} $进行更新,其中下标$i$表示迭代次数。设置一个极小的阈值$ \varepsilon $,当$ \left\| {{\text{d}}{\boldsymbol{x}}} \right\| < \varepsilon $时结束迭代,得到自标定的结果。
-
非线性模型的迭代求解过程需要一个比较准确的初值。对于文中自标定模型,通过圆拟合方法或者标定方法得到$s$的初值;$d$的初值可以通过仪器B的中心在仪器A坐标系下的坐标或者使用最短的距离观测值$l$和半径$s$相加得到,即$d = \sqrt {x_B^2 + y_B^2} $或$d = \min \left( l \right) + s$;将仪器$B$指向$A$时的方向记为初始方向,角度初始值$\alpha = 0$。
该模型涉及角度和边长两种观测值,需要两种观测值之间的权重比例,目前激光跟踪仪的方差分量已有较为系统的研究[21-22],可以采用方差分量估计的方法进行定权。文中直接采取粒子加速器准直工程中的已有结果[23],分别取$0.75''$和16 μm作为角度和距离观测值的单位权误差。
-
在三维空间内,三角形$ABP$依旧满足余弦定理,但是对应的角度有一定的变化。如图2所示($BA$方向不用满足水平要求),激光跟踪仪度盘读取的是$BP$靶点方向和$BA$仪器方向的水平角${\beta _1}$和竖直角${\beta _2}$,由空间几何关系可知$\angle APB$满足:
$$ \cos \angle APB = \cos {\beta _1}\cos {\beta _2} $$ (7) 三维空间内,余弦定理仍然是成立的。考虑到初试对准时存在偏差,公式(1)在三维空间上变化如下非线性模型:
$$ {l^2} - {d^2} - {s^2} + 2sd\cos \left( {{\beta _1} - {\alpha _1}} \right)\cos \left( {{\beta _2} - {\alpha _2}} \right) = 0 $$ (8) 式中:$ {\alpha _1} $和$ {\alpha _2} $均为待估参数,分别代表初始瞄准时的水平角度和竖直角度偏差。其作业流程为激光跟踪仪$B$初始指向仪器$A$,转动激光跟踪仪,在观测了$n > 4$组水平角度${\beta _1}$、竖直角度${\beta _2}$和长度$l$后,通过建立函数模型(8)进行平差求解,得到自标定结果。

图 2 空间角度关系示意图
Figure 2. The relationship between different angles
-
上述过程围绕两台激光跟踪仪中心的自标定展开,当需要构建多站测量系统时,可以借鉴文献[14]中的转站方案,将靶球进行转到不同激光跟踪仪上重复上述方法,即可实现系统的标定。在实验部分,针对两台激光跟踪仪的自标定方法,设计了二维模拟实验和三维实测实验,与传统基于球心拟合的方法进行比较,验证文中算法的有效性。
-
如图3所示,假如两个激光跟踪仪处于同一水平面,模拟圆心位置为$\left( {0,0} \right)$的激光跟踪仪$A$扫描圆心位置为$\left( {3,4} \right)$的激光跟踪仪$B$,对应真值$\bar d = 5\;{\text{m}}$,靶球到跟踪仪$B$的距离设置为$\bar s = 0.2\;{\text{m}}$。为了保证靶点的可通视性,设置点$P$相对于仪器$B$的方位范围为180°~270°。扫描间隔为${4^ \circ }$,共计得到22个靶点的真值。通过直角坐标和极坐标的转换,能够得到角度$\alpha $、$\beta $和长度$l$的真值。在真值的基础上分别添加标准差为$1.6''$和0.4 μm+0.3 μm/m的正态随机误差,得到激光跟踪仪的观测值。为了较小偶然误差的影响,重复实验100次,分别采用以下两种方案估计两台激光跟踪仪的距离$\hat d$和真值之间的偏差$\delta = \hat d - \bar d$。

图 3 模拟实验示意图,其中激光跟踪仪B半径扩大10倍
Figure 3. Diagram of the simulated experiment, where the radius of laser tracker B increases 10 times
Scheme 1:传统的基于球心拟合的方法;
Scheme 2:文中基于三角形结构的标定方法,其中迭代阈值设置为$ \varepsilon = {10^{ - 10}} $。
100次实验中,标定距离的偏差$\delta $如图4所示,表1统计计算了100次实验中其最大绝对偏差${{MAX}}\left( \delta \right)$、平均绝对偏差${{MEAN}}\left( \delta \right)$和偏差的均方根误差${{RMSE}}\left( \delta \right)$,其计算公式为:
$$ {{MAX}}\left( \delta \right) = max \left( {\left| \delta \right|} \right) $$ (9) $$ {{MEAN}}\left( \delta \right) = {{\sum\limits_{i = 1}^{100} {\left| {{\delta _i}} \right|} } \mathord{\left/ {\vphantom {{\sum\limits_{i = 1}^{100} {\left| {{\delta _i}} \right|} } {100}}} \right. } {100}} $$ (10) $$ {{RMS E}}\left( \delta \right) = {{\sqrt {\sum\limits_{i = 1}^{100} {\delta _i^2} } } \mathord{\left/ {\vphantom {{\sqrt {\sum\limits_{i = 1}^{100} {\delta _i^2} } } {10}}} \right. } {10}} $$ (11) 从图4中可以看出,传统基于圆拟合的方法存在明显大于20 μm的标定偏差,而基于三角形的结构的方法大部分标定误差小于10 μm,文中算法对应的蓝线更加靠近零偏差基准。从表1中定量对比可以看出,文中算法最大绝对偏差、平均绝对偏差和均方根误差仅为Scheme 1的28.32%、20.46%和20.98%,直接反映了文中算法在精度方便的优势。
进一步探究标定精度和扫描点数之间的关系。保持上述实验中其他设置不变,扫描点数从10增加到40,每组实验均重复100次,其中偏差的均方根误差和扫描点数的关系如图5所示。从图中可以看出,在不同扫描点数下,文中算法在精度上仍然具备明显的优势;点的数量增加能进一步提高两种方法的精度,其中基于圆拟合方法随着扫描点数量增加,其精度提升效果明显,可以在实践中采用增加冗余观测提高该方法的精度;而文中方法的精度随着扫描点数目略微增加,在工程中可以只测量15~20个点,能够兼顾自标定效率和精度。

图 4 模拟实验中的自标定偏差
Figure 4. Bias of the self-calibration in the simulation
表 1 模拟实验中偏差的统计结果(单位:μm)
Table 1. Statistical results of bias in the simulation experiments (Unit: μm)
Scheme 1 Scheme 2 ${{MAX} }\left( \delta \right)$ 23.85 84.21 ${{MEAN} }\left( \delta \right)$ 6.20 30.31 ${{RMSE} }\left( \delta \right)$ 7.73 36.84 
图 5 均方根误差和扫描点数关系图
Figure 5. Relationship between RMSE and the number of the scanning points
-
在国家同步辐射实验室准直组的综合调试间进行实测实验,该环境恒温恒湿,符合激光跟踪仪的测量条件。实验采用的两台徕卡AT930激光跟踪仪,其测距和测角精度分别为0.5 μm/m和$1.6''$,设计了以下三组实验方案。
Scheme 1:采用放置在铟钢四面体上的靶点作为公共点,使用激光跟踪仪的距离观测值进行自标定,如图6(a)所示。

图 6 (a)自标定的实验现场;(b) 带有靶球的激光跟踪仪
Figure 6. (a) Experiment site of self-calibration; (b) Laser tracker with target ball
Scheme 2:保持激光跟踪仪位置不变,使用专用的靶座将靶球固定到激光跟踪仪B上,如图6(b)所示。转动激光跟踪仪B,使用仪器A进行扫描得到15个球面点,拟合出球心,反算出自标定的距离。
Scheme 3:保持激光跟踪仪位置不变,只转动仪器B的竖轴,在此过程中记录仪器A的距离测量值和仪器B的角度测量值,得到15对角度距离观测值,根据公式(8)建立函数模型求解参数。
Scheme 1通过Spatial Analyzer (SA)软件解算得到自标定的结果为${\hat d_1} = {\text{7\;231}}{\text{.548\;8 mm}}$。该过程只涉及了高精度的边长观测值,因此自标定的精度较高,以此作为基准衡量Scheme 2和Scheme 3的偏差。改变测量点位,重复10次后两种方案,Scheme 2和Scheme 3标定长度记为${\hat d_2}$和${\hat d_3}$,其结果与${\hat d_1}$的差值分别记为${\kappa _2} = {\hat d_2} - {\hat d_1}$和${\kappa _3} = {\hat d_3} - {\hat d_1}$。图7为两种方案相较于Scheme 1的差值。表2统计了自标定结果的标准差${{STD}}\left( {{{\hat d}_i}} \right)$和平均绝对偏差${{MEAN}}\left( {\left| {{\kappa _i}} \right|} \right)$,其中$i$取值为2或3。

图 7 10次实验的差值结果
Figure 7. Difference results in ten experiments
表 2 自标定结果的统计结果(单位:μm)
Table 2. Statistical results of self-calibration (Unit: μm)
Scheme 2 Scheme 3 ${{STD} }\left( { { {\hat d}_i} } \right)$ 7.37 2.44 ${{MEAN} }\left( {\left| { {\kappa _i} } \right|} \right)$ 21.30 6.21 综合图7和表2可以看出,基于球面拟合的方法偏差浮动较大,其标准差约为文中算法的3倍,重复精度较低。基于球面拟合的方法的平均绝对偏差为21.30 μm,相较而言,文中算法相对于Scheme 1的绝对偏差的平均值仅为6.21 μm。文中算法在三维自标定中具有可行性,两个精度指标相较传统基于球拟合的算法有着显著的提升。文中算法无需在空间中布设公共点,相较于Scheme 1,能够在通视情况不好的加速器隧道中进行自标定。
-
文中提出了基于三角形结构的自标定方法,提高了基于球面拟合自标定方法的精度。在相距5 m的激光跟踪仪自标定模拟实验,文中方法均方根误差为7.73 μm,仅为基于球面拟合方法的20.98%。同时,在国家同步辐射实验室进行10次重复实验,文中算法的标准差和平均绝对偏差分别为基于球面拟合方法的33.11%和29.15%,两个精度指标均有显著提高。文中算法无需公共点即可完成激光跟踪仪之间的自标定,在保证效率的基础上提高了测量精度,具有较好的应用前景。
A high-precision self-calibration method for laser tracker without common points
-
摘要: 多台激光跟踪仪组成的测量系统能够得到高精度的坐标观测值,在加速器准直工程领域应用十分广泛。该系统需要自标定仪器中心的距离,目前基于球面拟合的自标定方法虽然测量效率较高,但是其精度有限。为了提高其精度,分析基于拟合的自标定方法精度较低的主要原因,提出了基于三角形结构的自标定方法,定量对比了新方法和基于球心拟合方法的精度。新方法建立非线性误差模型进行参数迭代求解,能够应用于激光跟踪仪的三维自标定。通过模拟仿真和实测实验,证明了该方法比基于球心拟合的自标定方法在精度上有了大幅度提升。文中算法无需增加额外设备,改进了原先基于球心拟合方法并提高其自标定精度,具有一定的工程应用价值。Abstract:
Significance Because the distance measurement error of the laser tracker is much smaller than the angle measurement error, a high-precision coordinate measurement system composed of multiple laser trackers is widely used in large-scale space measurement. The system requires self-calibration before measurements, which is a process that determines the distance between centers of different laser trackers. Although the method based on common points can achieve higher accuracy, it has high requirements for the measurement environment and has a high workload. Although the method based on sphere fitting is simple to operate, its self-calibration accuracy is low. In general, it is difficult to balance measurement efficiency and measurement accuracy with current methods. Progress To overcome the shortcomings of current methods, we propose a self-calibration method based on triangular structure. Firstly, error analysis for the method based on circle fitting is conducted in two-dimensional space. For simplification, laser tracker A is assumed to measure the target ball on laser tracker B at a distance of 5 m. The angle measurement error of A will make the measurement error of points on the circle more than 30 μm through the amplification effect of length, and reduce the self-calibration accuracy further. Second, we notice that the laser tracker B also has angle observations, and propose a new method that uses angle observations from B coupled with distance observations from A, which can avoid the big error from laser tracker A. The function model based on the triangular structure is established, and the self-calibration results are obtained through iterative optimization. Compared with the method based on circle fitting, the advantages of the new method are analyzed quantitatively. Finally, our method is easily applicable to three-dimension measurement. Results We verify the superiority of this algorithm through simulated and actual measurements. In the two-dimensional simulated experiment, the true value of self-calibration is set to 5 m. In 100 repeated experiments, most of the absolute deviations based on sphere fitting were greater than 20 μm, while the absolute deviations of the proposed method were less than 10 μm. The root mean square error (RMSE) of the proposed algorithm in this article was 20.98% of RMSE for the sphere fitting method. Moreover, the number of points that the algorithm in this paper needs to measure was significantly less than the method based on spherical fitting. The measurement was implemented in the alignment laboratory of the National Synchrotron Radiation Laboratory (NSRL). Two Leica AT930 laser trackers were used and their true distance was 7 231.548 8 mm. We tested the proposed method and the method based on sphere fitting ten times. The mean absolute bias and standard deviation for the former method were only 6.21 μm and 2.44 μm respectively, while the bias and standard deviation for the latter one was 21.30 μm and 7.37 μm. The proposed method, which had better repeatability, showed the superiority of accuracy in real measurement. Conclusions and Prospects We analyze that the reason for the decrease in accuracy of the self-calibration method based on sphere center fitting is the low accuracy of the angle observation values of the aiming laser tracker. The self-calibration method based on a triangular structure is proposed. This method uses the angle on the target laser tracker to match the distance observation with high accuracy. The accuracy advantages of this algorithm are verified through quantitative analysis and two experiments. The algorithm in this paper can complete self-calibration between laser trackers without common points and improves measurement efficiency while ensuring accuracy. -
Key words:
- laser tracker /
- self-calibration /
- spherical fitting /
- nonlinear model /
- accuracy
-
图 3 模拟实验示意图,其中激光跟踪仪B半径扩大10倍
Figure 3. Diagram of the simulated experiment, where the radius of laser tracker B increases 10 times
图 5 均方根误差和扫描点数关系图
Figure 5. Relationship between RMSE and the number of the scanning points
图 6 (a)自标定的实验现场;(b) 带有靶球的激光跟踪仪
Figure 6. (a) Experiment site of self-calibration; (b) Laser tracker with target ball
表 1 模拟实验中偏差的统计结果(单位:μm)
Table 1. Statistical results of bias in the simulation experiments (Unit: μm)
Scheme 1 Scheme 2 ${{MAX} }\left( \delta \right)$ 23.85 84.21 ${{MEAN} }\left( \delta \right)$ 6.20 30.31 ${{RMSE} }\left( \delta \right)$ 7.73 36.84  下载: 导出CSV
下载: 导出CSV
表 2 自标定结果的统计结果(单位:μm)
Table 2. Statistical results of self-calibration (Unit: μm)
Scheme 2 Scheme 3 ${{STD} }\left( { { {\hat d}_i} } \right)$ 7.37 2.44 ${{MEAN} }\left( {\left| { {\kappa _i} } \right|} \right)$ 21.30 6.21
下载: 导出CSV
-
[1] Wang W, Li X, Luo T, et al. Alignment and installation for resonant cavities of FELiChEM [J]. Chinese Journal of Lasers, 2022, 49(23): 2304003. (in Chinese) doi: 10.3788/CJL202249.2304003 [2] Luo T, Qi Z, Wang W, et al. An improved adjustment method applied in the transformation of laser tracker [J/OL]. [2023-12-22]. http://www.opticsjournal.net/Articles/z230555/EarlyPosting. [3] Yang Z, Liu M, Zhou Y, et al. Study on processing scheme and precision measurement method of payload adapter with irregular shape [J]. Infrared and Laser Engineering, 2019, 48(S1): S117001. (in Chinese) [4] Wang Z, Zhang A. Laser tracking measurement accuracy improvement method for mega gear [J]. Infrared and Laser Engineering, 2021, 50(11): 20210030. (in Chinese) doi: 10.3788/IRLA20210030 [5] Fan B, Li G, Li P, et al. Adjustment of a laser interferometer 3D rank-defect free-network [J]. Geomatics and Information Science of Wuhan University, 2015, 40(2): 222-226, 232. (in Chinese) [6] Wang Z, He X, Wang W, et al. High precision pre-alignment method based on laser tracker [J]. Geomatics and Information Science of Wuhan University, 2021, 46(4): 555-560. (in Chinese) [7] Wu B, Xu Y, Yang F, et al. 3D coordinate measuring system based on laser tracking absolute length measurement multilateral method [J]. Infrared and Laser Engineering, 2018, 47(8): 0806007. (in Chinese) doi: 10.3788/IRLA201847.0806007 [8] Lin Y, Zhang G, Li Z, et al. Self-calibration and simulation of the four-beam laser tracking interferometer system for 3D coordinate measurement [J]. Chinese Journal of Scientific Instrument, 2003, 24(2): 205-210. (in Chinese) [9] Lin Y, Zhang G, Li Z, et al. Optimal arrangement of four-beam laser tracking system for 3D coordinate measurement [J]. Chinese Journal of Lasers, 2002, 29(11): 1000. (in Chinese) [10] Hu J, Yu X, Ren X, et al. Optimal layout of three-dimensional coordinate measurement system based on laser multi-lateration [J]. Chinese Journal of Lasers, 2014, 41(7): 0708001. (in Chinese) doi: 10.3788/CJL201441.0708001 [11] Hu J, Yu X, Peng P, et al. Layout optimization of three-dimensional coordinate measurement system based on laser multi-lateration [J]. Chinese Journal of Lasers, 2014, 41(1): 0108006. (in Chinese) doi: 10.3788/CJL201441.0108006 [12] Zou J, Yang D. Measurement accuracy analysis of multilateral method based on optimal layout with non-directional point calibration [J]. Geomatics and Information Science of Wuhan University, 2022, 47(10): 1758-1765. (in Chinese) [13] Guo Y, Li Z, Zhao W, et al. Two-laser-tracker system for precise coordinates transmission [J]. Optics and Precision Engineering, 2020, 28(1): 30-38. (in Chinese) doi: 10.3788/OPE.20202801.0030 [14] He J, Zhang F, Zhang H, et al. Multilateral laser tracking system self-calibration method based on spherical center fitting [J]. Infrared and Laser Enginnering, 2020, 50(8): 20190438. (in Chinese) [15] Chernov N. Circular and Linear Regression: Fitting Circles and Lines by Least Squares [M]. Boca Raton: CRC Press, 2010. [16] Qi Z, Peng J. A fast and robust method of spherical target positioning [J]. Journal of Geodesy and Geodynamics, 2023, 43(6): 617-621. (in Chinese) [17] Koch K R. Parameter Estimation and Hypothesis Testing in Linear Models [M]. Berlin: Springer Science & Business Media, 1999. [18] Zhou T, Lin P, Zhang S, et al. A novel sequential solution for multi-period observations based on the Gauss-Helmert model [J]. Measurement, 2022, 193: 110916. doi: 10.1016/j.measurement.2022.110916 [19] Wang L, Ding R. A parameter determination method of unscented transformation and its approximate ability analysis in the precision estimation of nonlinear measurement adjustment [J]. Measurement, 2020, 166: 108065. doi: 10.1016/j.measurement.2020.108065 [20] Chang G. On least-squares solution to 3D similarity transformation problem under Gauss–Helmert model [J]. Journal of Geodesy, 2015, 89(6): 573-576. doi: 10.1007/s00190-015-0799-z [21] Ding K, Jin T, Jiang Z, et al. Optimization and accuracy analysis of point spatial distribution based on three-dimensional multi-point intersection [J]. Optics and Precision Engineering, 2021, 29(4): 691-700. (in Chinese) doi: 10.37188/OPE.20212904.0691 [22] Zhou W, Ding L, Wang Y, et al. Application of bundle adjustment to accuracy evaluation of laser tracker [J]. Optics and Precision Engineering, 2012(4): 851-857. (in Chinese) [23] Wang T, Zhou W, Dong L, et al. Research on the accuracy of control network measured by laser tracker in particle accelerator [J]. Geomatics and Information Science of Wuhan University, 2024, 49(1): 156-166. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 109
- HTML全文浏览量: 22
- PDF下载量: 51
- 被引次数: 0

