










-
自适应光学在近几十年已经广泛应用于高能激光系统、天文观测等各方面,随着仿真技术与计算科学的发展,近年来,新的技术、方法不断被提出来,新的器件、算法也在系统中应用。对于这类新技术的发展,利用数值仿真进行试验和论证更为便捷。通过对不同结构的自适应系统进行精确建模,可以再现波前校正的物理过程,对系统性能进行优化设计。目前可以开展自适应光学仿真的系统软件大多是商业软件,价格高昂,且随着国际形势的紧张,具有极大的不可控性,有些还对我国禁运;也有部分开源软件,但操作性、扩展性较差,运行不稳定。
WaveTrain是MZA公司设计由美国空军实验室进行资助开发的软件,主要针对高能激光领域美国军方和各科研院所的仿真需求。WaveTrain是一套可以对光波大气湍流传输、光束控制和自适应光学系统进行计算机建模仿真的软件,其模型丰富,仿真粒度细,模型考虑的效应也更全面[1]。该软件价格不菲,而且对我国禁售。由欧洲天文台的学者们开发的CAOS是以天文观测为应用,用IDL语言开发的一套自适应仿真模型库[2],但内置模型比较基础,软件稳定性、扩展性不高,用户界面不够友好。除此之外,国外还有一些其他的涵盖自适应光学的仿真软件,如Lightpipes、Arroyo、YAO等,在相关的自适应光学系统仿真研究中都有所应用[3]。
国内开发的包含自适应光学系统模型的仿真软件主要有北京应用物理与计算数学研究所在自主研发的SciSimu平台基础上研制的激光系统仿真软件EasyLaser,该软件具备对光束传输、自适应校正等过程的建模和仿真能力[4]。中国科学院安徽光学精密机械研究所也开发了一套用于模拟高能激光大气传输和自适应校正的4D仿真程序[5]。国防科技大学前沿交叉学科学院与中国科学院软件研究所联合开发了光学系统仿真软件Seelight,该软件可进行光纤激光器、目标跟踪瞄准、主动照明、钠信标、自适应光学系统、强激光发射系统和目标毁伤特性等分系统的独立仿真建模,可模拟激光产生、大气传输和自适应光束控制等基本物理过程,包含各系统元器件等基本的功能模块。利用该软件笔者课题组开展了自适应光学系统对大气湍流像差校正效果的建模仿真研究[6]。
由于大气湍流非等晕性问题的限制,在传统的自适应光学系统中,只能在几个角秒视场范围内得到接近衍射极限分辨率的成像结果,这就导致在狭窄的视场内,存在许多不能被捕获的观测目标。多层共轭自适应光学(MCAO)技术采用多个波前探测器探测不同导星方向的波前畸变,重构大气湍流三维波前,进而通过控制多个变形镜来校正不同高度大气湍流的畸变信息。但由于多层共轭自适应光学系统自身结构的原因,需要多台波前探测器同时对不同视线方向上的湍流波前畸变进行探测,使得系统结构复杂,成本昂贵,探测同步性均匀性较差,在一定程度上限制了该系统的工作效果。基于光场相机波前探测系统的光场层析技术,具有视场大、一次曝光可获得多视角方向湍流波前信息等特点,可以尝试利用一台光场相机波前探测器代替传统 MCAO 系统中的多个波前探测器,达到简化系统,节约成本的效果。北京理工大学的宋杰基于MAOS软件对太阳多层共轭自适应光学系统的性能进行了系统的仿真研究[7]。中国科学院上海天文台的颜召军等对单层和两层的层向共轭自适应光学系统进行了模拟仿真[8]。而国防科技大学的张烜喆等通过光场相机成功地在强湍流下复原出清晰的图像,验证了光场相机是用于大气湍流层析技术的有效方法[9]。
-
构建光场相机的物理模型,用光场相机测量经过多层大气湍流相位屏后的入瞳光束,根据光场层析技术恢复出视场内整层大气的波前畸变。具体过程分为以下三步:
(1)基于光场相机的基本光学结构,从光场相机的波前探测理论分析入手,建立光场相机波前探测的理论模型,选择合适的衍射传输算法,进行光场波前的成像仿真。
(2)光场大气层析术需要利用波前探测器获得不同视线方向上的累积的湍流畸变波前信息,在进行数值模拟仿真过程中,运用泽尼克分解后计算解析式的方法,从完整波前中切分单个视角的波前,保证各视角波前重叠区域采样的零误差。
图1中,实线圆代表元瞳面区域(Metapupil)的波前相位,虚线圆代表足迹区域(Foot print)的波前相位,它们之间能够通过位置变换相互转换。假设图2中原大气湍流相位屏为蓝色区域,白色圆区域是需要提取出来的目标波前部分,将原大气湍流波前
$ {\rm{\varphi }}\left(x,y\right) $ 进行泽尼克模式分解,得到该波前的若干阶泽尼克模式,随后将每一阶泽尼克模式根据其系数进行波前复原,再对每一单阶泽尼克模式复原出来的波前$ {{\rm{\varphi }}}_{k}\left(x,y\right) $ 进行位置变换,使得位置与目标波前区域相同,最后将得到的泽尼克模式波前分别乘上其对应的泽尼克模式系数,最后求和,得到的结果即为单个视角的波前。
图 1 元瞳面和足迹
Figure 1. Metapupil and foot print
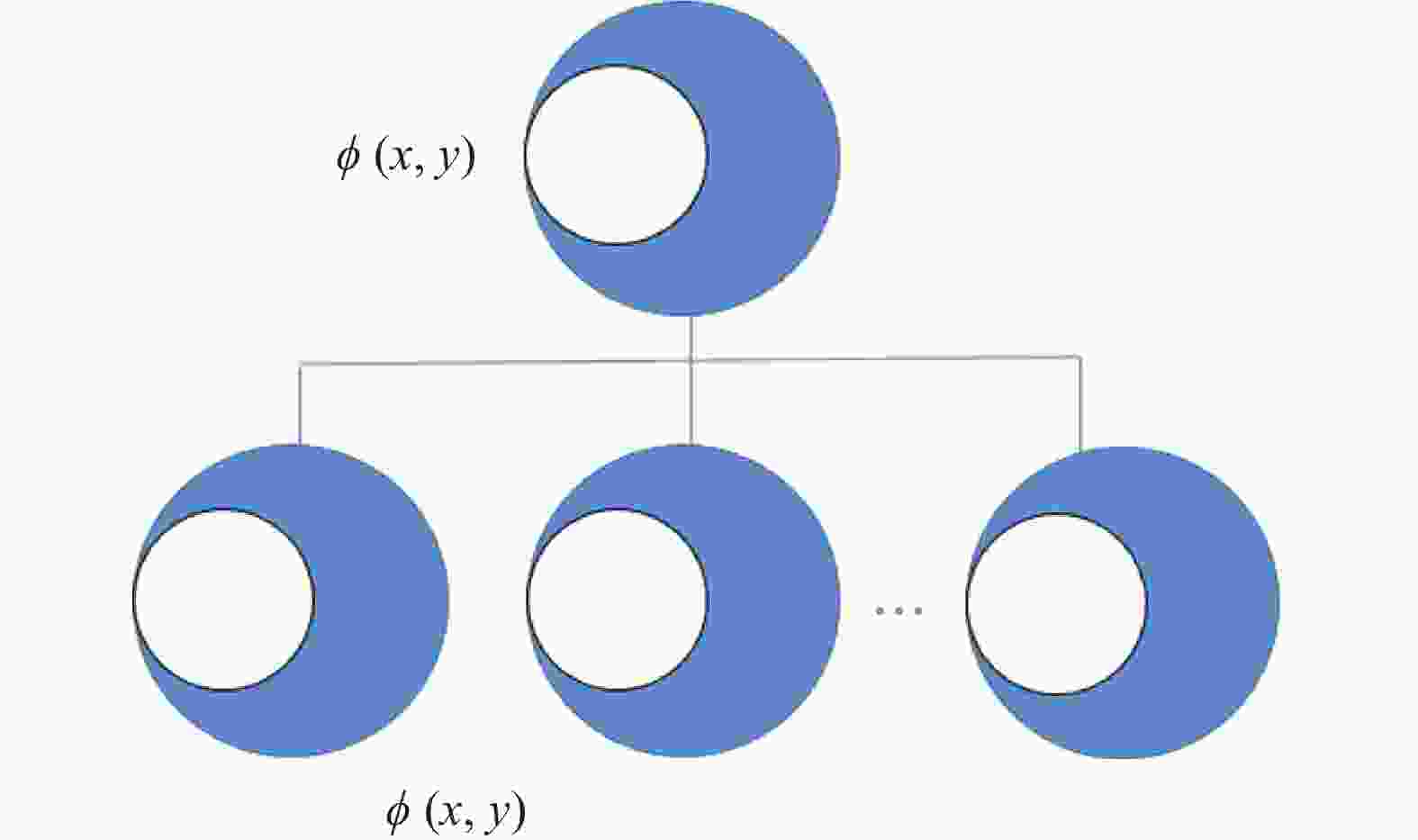
图 2 泽尼克模式法提取相位屏的局部区域
Figure 2. Extracting the local area of phase screen by Zernike model method
(3)运用光场数字重聚焦技术、模式法大气层析技术,复原大视场完整波前。利用光场相机采集到的四维光场原始数据对物空间方向不同位置进行成像时,需要将采集到的光场重新聚焦到新的目标成像平面上,如图3所示。

图 3 光场相机重聚焦示意图
Figure 3. Refocusing principle of light field camera
-
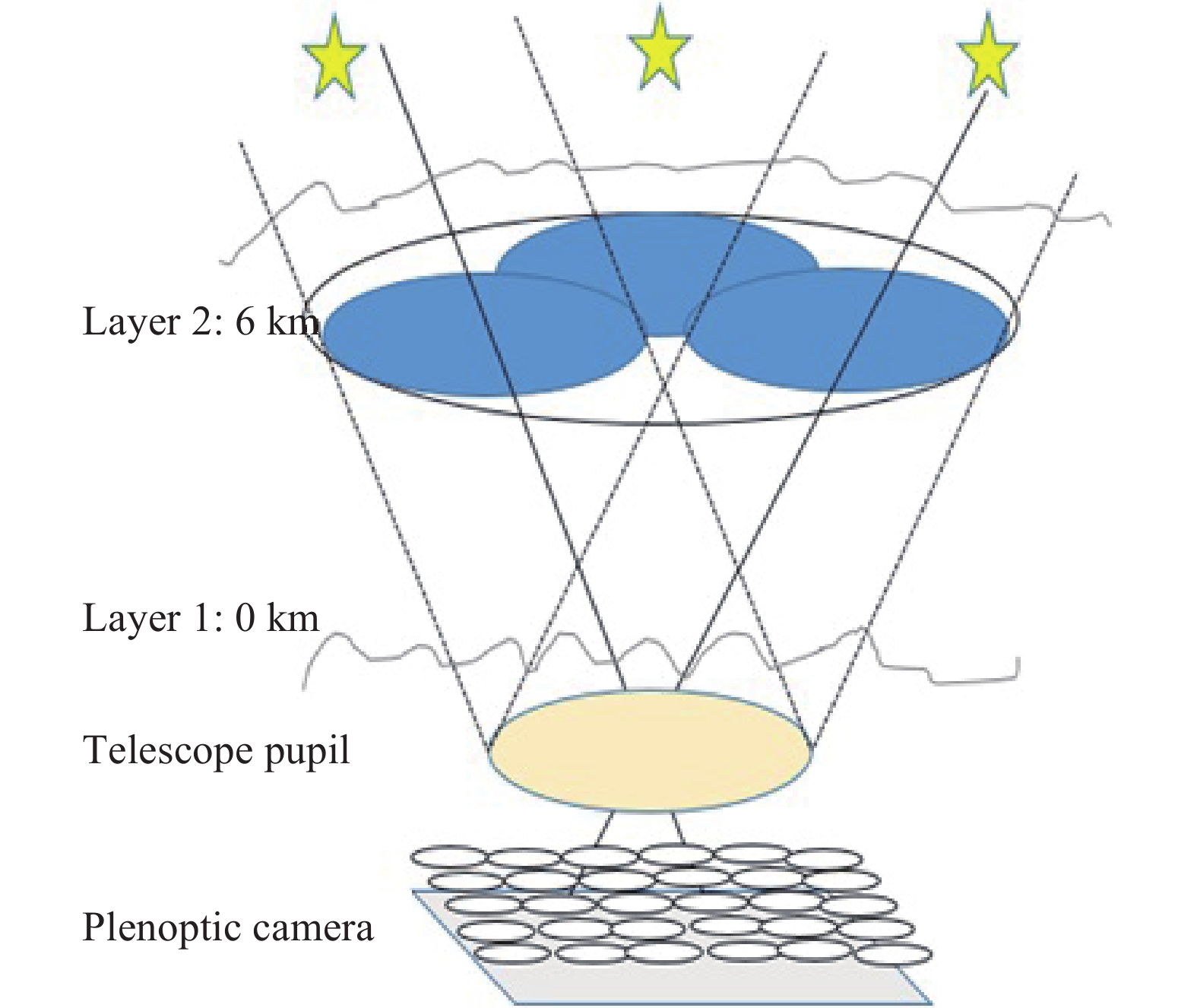
在光场层析自适应光学系统的建模仿真中,建立了目标导星分别为自然导星(目标距离无穷远)和激光导星(目标位于有限距离)情况下的光场层析模型,利用具体的数值模拟仿真验证光场相机波前探测系统的大气层析能力。假设探测器的口径为1 m,视场角为60″,大气高度分别位于0 km和6 km。图4展示了目标为三颗自然导星的情况下的模型概念图,图5为光场相机复原两层湍流相位屏的仿真结果。大气湍流波前符合 Kolmogorov 统计规律,复原效果评价指标利用复原波前与原波前残差的均方根RMS 表示:

图 4 两层大气湍流屏和三颗自然导星构成的光场层析模拟仿真系统概念图
Figure 4. Conceptual graph of two-layer atmosphere turbulence screens and three natural guide stars based light field tomography simulation system
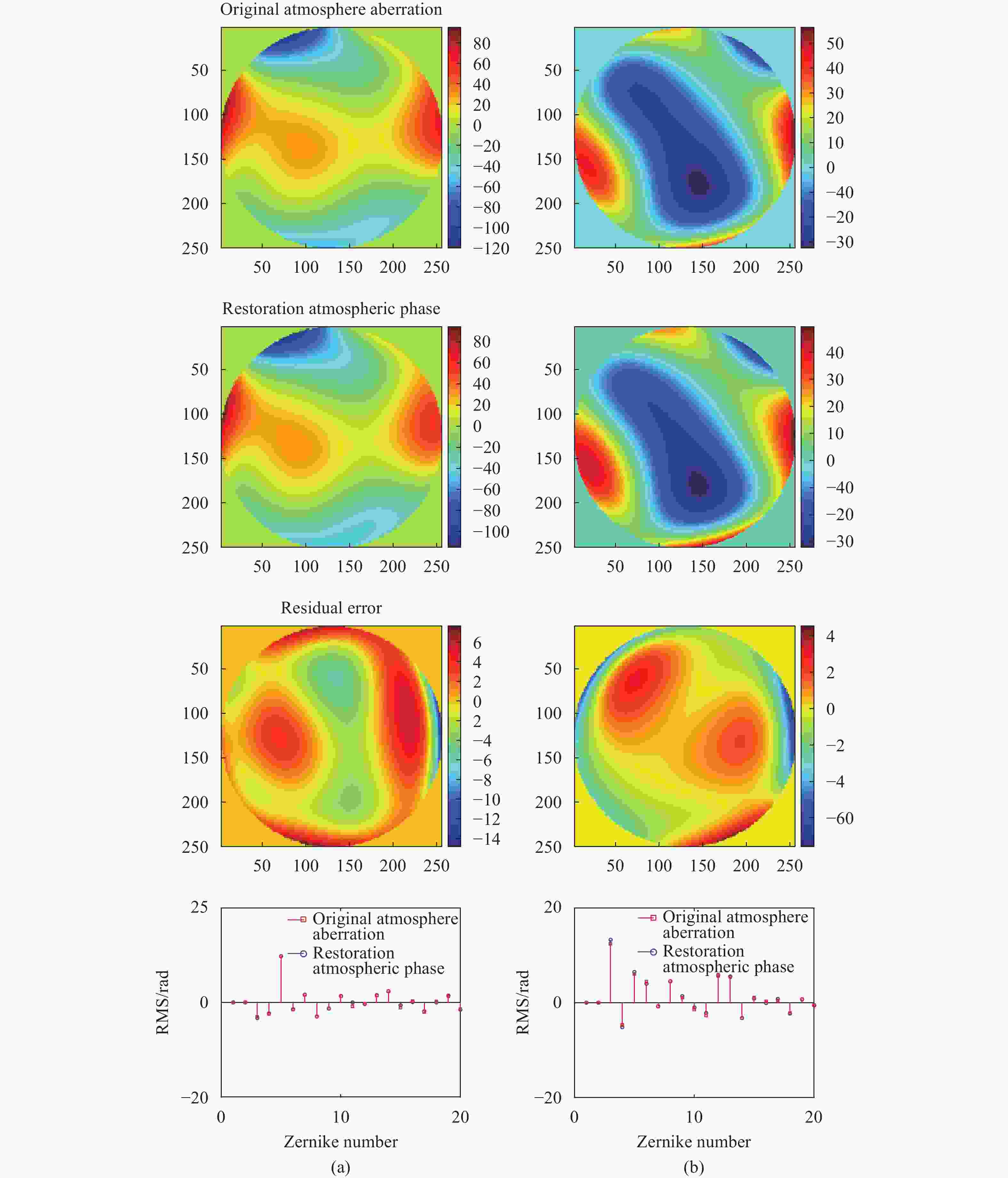
图 5 采用自然导星情况下光场层析技术的数值模拟仿真结果。(a) 第一层大气湍流屏;(b) 第二层大气湍流屏。从上到下依次是原始大气像差、复原大气相位、残差、复原前后泽尼克系数
Figure 5. Numerical simulation results of light field tomography at situation of natural guide stars. (a) Fisrt layer of atmosphere turbulence screen; (b) Second layer of atmosphere turbulence screen. From top to bottom is the original atmosphere aberration, the restoration atmospheric phase, the residual error and the Zernike coefficient before and after reconstruction respectively
$$ {\rm RMS}={\left[{ \underset{S}{\iint }{(\phi (r)-\widehat{\phi }(r))}^{2}}{\rm d}{r}\right]}^{1/2}\times {\left[{ \underset{S}{\iint }{\phi }^{2}(r){\rm d}{r}}\right]}^{-1/2}$$ 由图5计算得到的复原前后两层大气湍流残差的 RMS 值分别为:6.04%,9.19%。
对目标为激光导星情况下进行光场层析模型的数值模拟仿真,假设口径为 1 m的探测器,在60″视场范围内分布着三颗位于不同高度的激光导星,分别为 80 km,90 km和100 km,如图6所示为该系统的概念模型。图7给出了光场相机复原两层湍流相位屏的仿真结果。

图 6 两层大气湍流屏和三颗激光导星构成的光场层析模拟仿真系统概念图
Figure 6. Conceptual graph of two-layer atmosphere turbulence screens and three laser guide stars based light field tomography simulation system
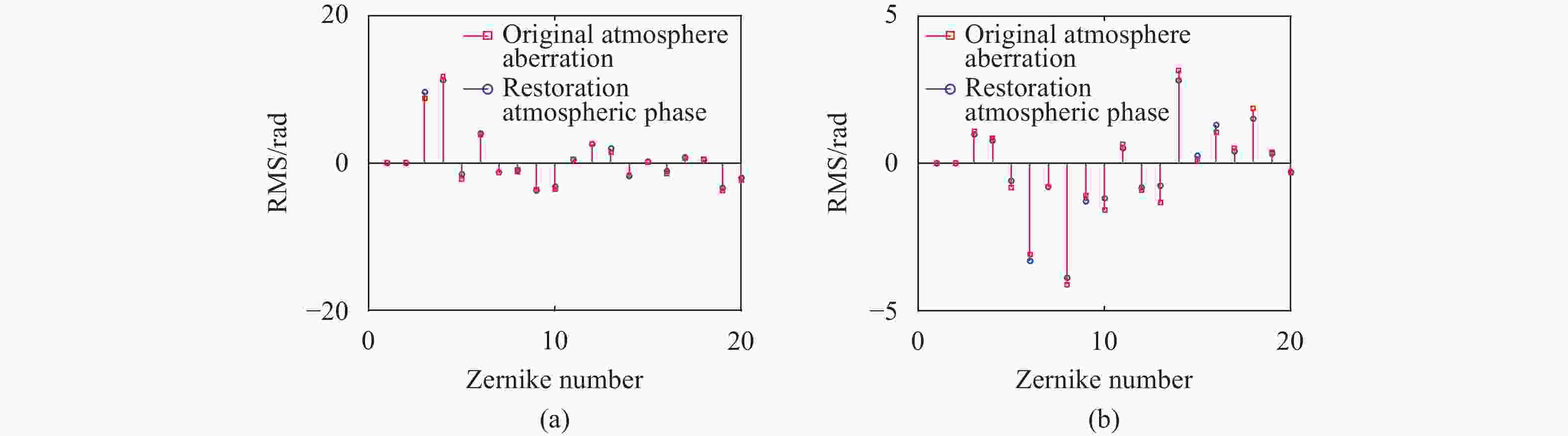
图 7 采用激光导星情况下光场层析技术的数值模拟仿真结果。(a) 第一层大气湍流屏;(b) 第二层大气湍流屏。从上到下依次是原始大气像差、复原大气相位、残差、复原前后泽尼克系数
Figure 7. Numerical simulation results of light field tomography at situation of laser guide stars. (a) Fisrt layer of atmosphere turbulence screen; (b) Second layer of atmosphere turbulence screen. From top to bottom is the original atmosphere aberration, the restoration atmospheric phase, the residual error and the Zernike coefficient before and after reconstruction respectively
由图7计算得到复原前后两层大气湍流残差的 RMS 值分别为:8.72%,15.16%。可以看到激光导星引起的聚焦非等晕性使重构大气像差的误差显著增大了。

-
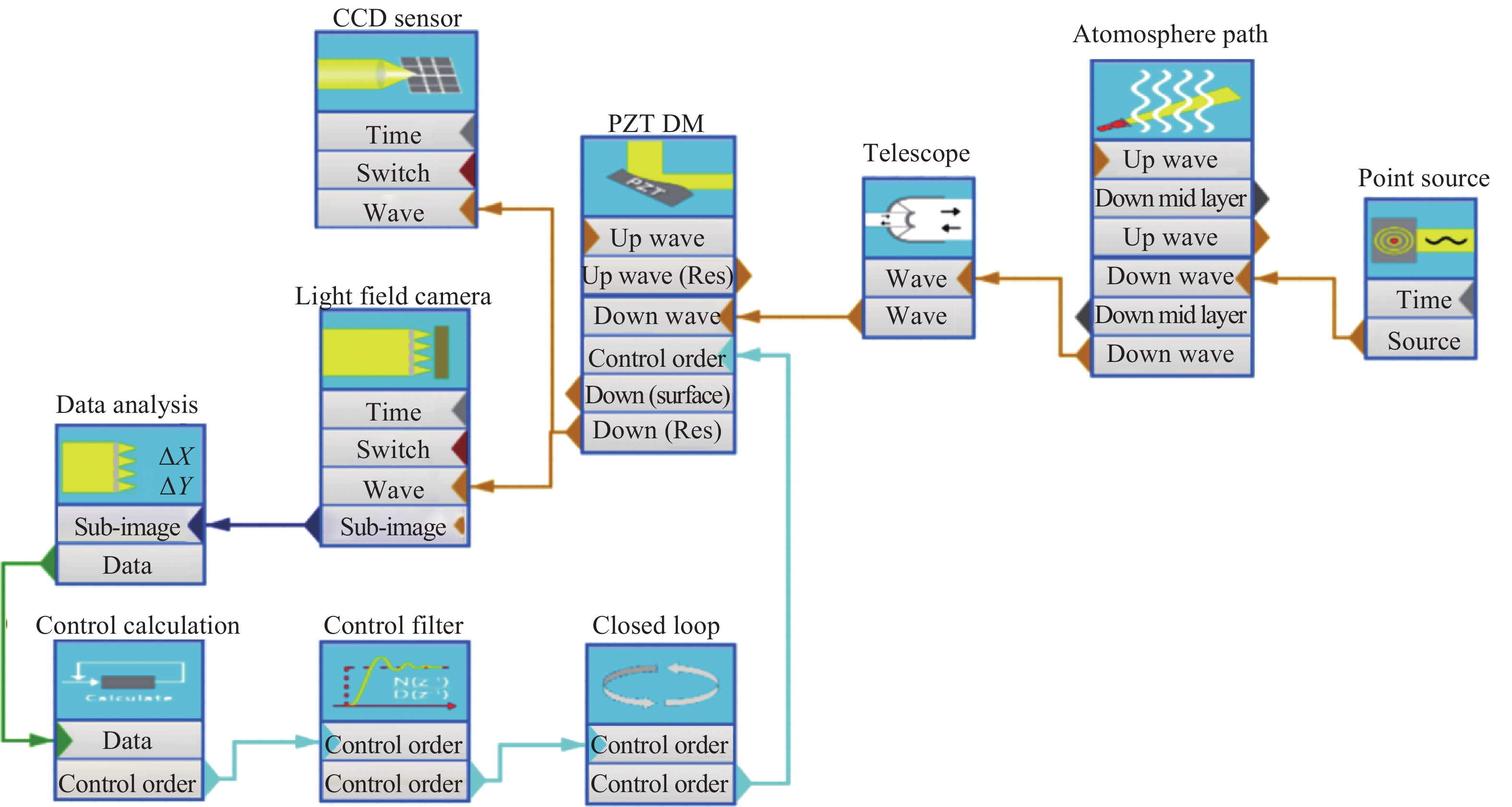
笔者利用Seelight中的光场相机模块与PZT变形镜模块搭建了自适应光学仿真系统,如图8所示。验证以光场相机作为波前传感器,与89单元变形镜配合在闭环工作模式下校正大气湍流相位屏的效果。
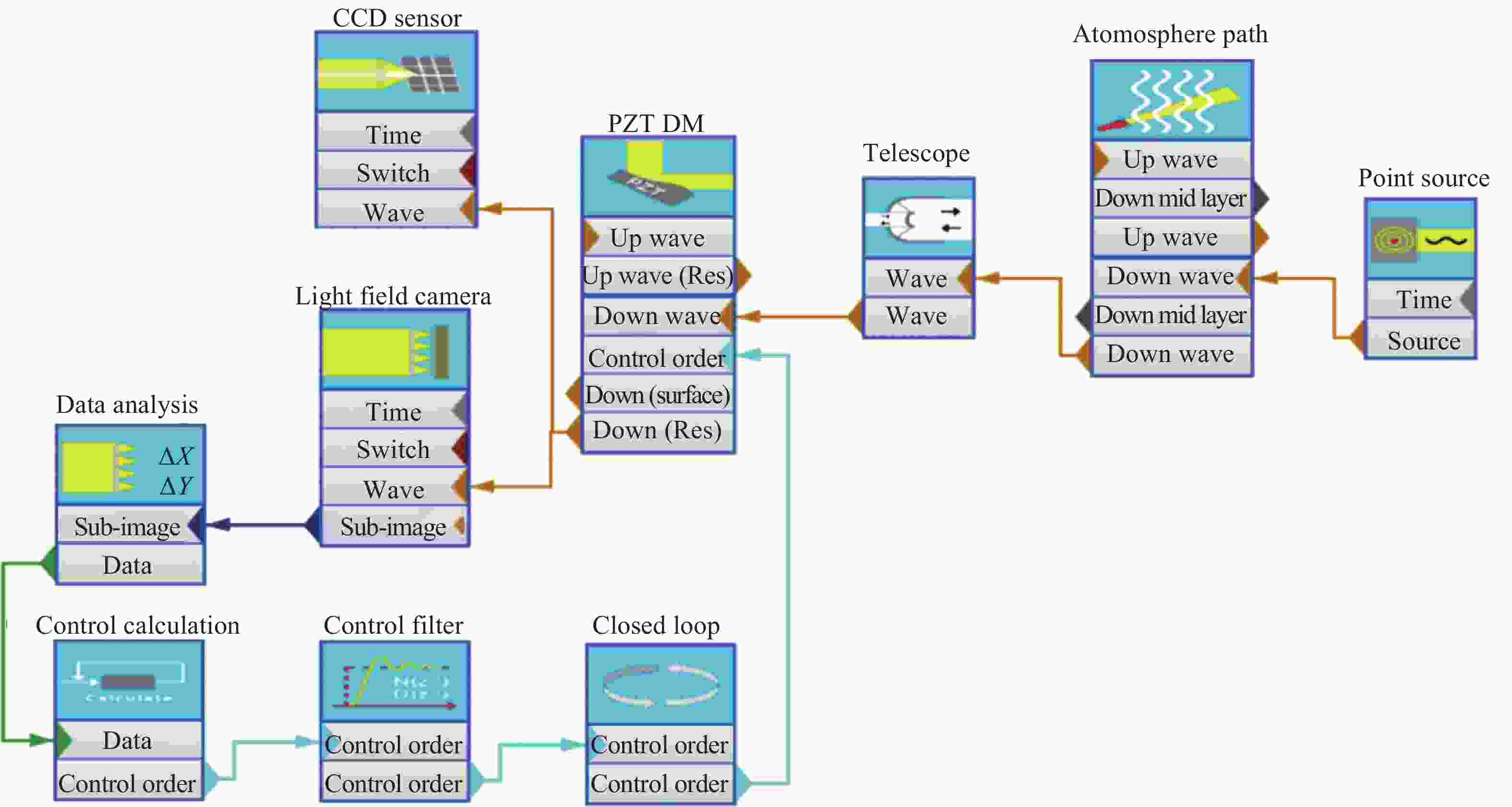
图 8 光场相机自适应光学仿真系统
Figure 8. Adaptive optics simulation system based on light field camera
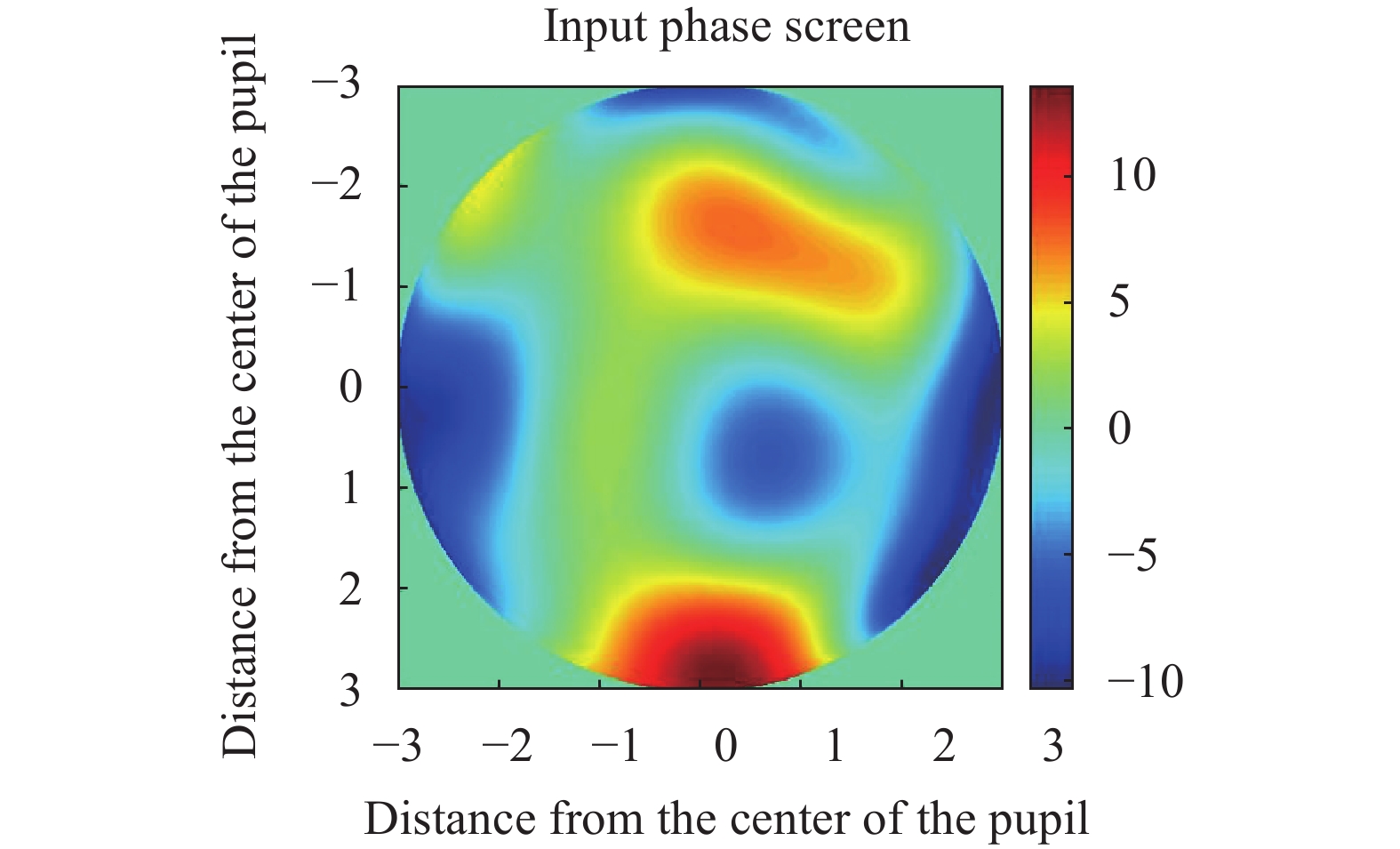
大气湍流相位屏模型采用基于傅里叶谱的数值方法[10],大气垂直传输距离10 km,湍流强度Cn2为10−15。光场相机模型的参数为:光束口径6 mm,探测波长633 nm,主透镜的f数为30,微透镜阵列的大小为10×10,微透镜元口径200 μm,微透镜阵列f数15,CCD像元尺寸5 μm,动态调制半径为d,d为微透镜元的口径。89单元变形镜致动器以六边形排布。点光源发出光经过湍流相位屏后到达望远镜入瞳处的波前畸变和变形镜的致动器排布方式分别如图9和图10所示。

图 9 望远镜入瞳处的波前畸变
Figure 9. Wavefront distortion at telescope pupil

图 10 变形镜致动器排布方式
Figure 10. Layout of deformable mirror actuators
将光场相机测得光场数据经过动态调制后,利用直接斜率法计算重构矩阵,生成电压信号控制变形镜致动器形成共轭面形补偿波前畸变。表1给出了在闭环控制模式下对大气湍流波前畸变校正后远场光斑随着迭代次数的变化趋势。从结果中可以看出在动态调制时光场相机的闭环校正效果明显,远场光斑的收敛显著,当迭代进行到第三次时远场光斑已经趋于稳定。
表 1 自适应光学系统闭环控制下远场光斑变化趋势
Table 1. Far field spot distribution changing tendency at closed loop of AO system
Number of iterations 0 1 2 3 Closed loop 



Number of iterations 4 5 6 7 Closed loop 



-
文中系统介绍了用于自适应光学系统仿真的主流软件。针对采用传统自适应光学系统以哈特曼作为波前传感器存在校正视场小的不足,提出了利用光场相机可探测大视场、多视角湍流信息等特点可以替代传统多层共轭自适应光学(MCAO)系统中的多个波前探测器,达到简化系统,节约成本的效果。采用自主研发的光学系统仿真软件Seelight中的光场相机模块,结合光场数字重聚焦技术、模式法大气层析技术,实现了大视场双层完整湍流波前的复原,并搭建了光场相机与89单元变形镜配合的自适应光学仿真系统,仿真验证了在闭环工作模式下对大气湍流波前畸变的有效校正。
Simulation research on adaptive optics system based on light field camera
-
摘要: 在自适应光学系统中,采用传统的哈特曼波前传感器只能在较小视场范围内对大气湍流进行有效校正,而以光场相机作为波前探测器具有视场大、一次曝光可获得多视角方向湍流信息等特点,可以替代传统多层共轭自适应光学(MCAO)系统中的多个波前探测器,达到简化系统,节约成本的效果。文中采用自主研发的光学系统仿真软件Seelight中的光场相机模块,结合光场数字重聚焦技术、模式法大气层析技术,复原了大视场完整波前,并搭建了自适应光学仿真系统,模拟与89单元变形镜配合实现在闭环工作模式下对大视场的大气湍流引起波前畸变的有效校正。Abstract: In adaptive optics (AO) system, the traditional Hartmann wave-front sensor can only be used to effectively correct atmospheric turbulence within a small field of view, while the light field camera served as the wave-front sensor has the characteristics of large field of view and multi-angle directional turbulence information obtained by one single exposure, which can replace multiple wave-front sensors in the traditional multi-layered conjugation adaptive optics (MCAO) system and simplify the system and save costs. In this paper, the light field camera module in Seelight, an optical system simulation software independently developed, was used to restore the complete wavefront of the large field of view combining the optical field digital refocusing technology and the mode atmospheric analysis technology. An adaptive optical simulation system was built with a light field camera and a 89 unit deformable mirror. The simulation results show that the optimized AO system can effectively correct the wavefront distortion caused by atmospheric turbulence in a large field of view under the closed loop working mode.
-
Key words:
- wavefront sensing /
- light field camera /
- multi-layered conjugation /
- simulation system
-
图 2 泽尼克模式法提取相位屏的局部区域
Figure 2. Extracting the local area of phase screen by Zernike model method
图 4 两层大气湍流屏和三颗自然导星构成的光场层析模拟仿真系统概念图
Figure 4. Conceptual graph of two-layer atmosphere turbulence screens and three natural guide stars based light field tomography simulation system
图 5 采用自然导星情况下光场层析技术的数值模拟仿真结果。(a) 第一层大气湍流屏;(b) 第二层大气湍流屏。从上到下依次是原始大气像差、复原大气相位、残差、复原前后泽尼克系数
Figure 5. Numerical simulation results of light field tomography at situation of natural guide stars. (a) Fisrt layer of atmosphere turbulence screen; (b) Second layer of atmosphere turbulence screen. From top to bottom is the original atmosphere aberration, the restoration atmospheric phase, the residual error and the Zernike coefficient before and after reconstruction respectively
图 6 两层大气湍流屏和三颗激光导星构成的光场层析模拟仿真系统概念图
Figure 6. Conceptual graph of two-layer atmosphere turbulence screens and three laser guide stars based light field tomography simulation system
图 7 采用激光导星情况下光场层析技术的数值模拟仿真结果。(a) 第一层大气湍流屏;(b) 第二层大气湍流屏。从上到下依次是原始大气像差、复原大气相位、残差、复原前后泽尼克系数
Figure 7. Numerical simulation results of light field tomography at situation of laser guide stars. (a) Fisrt layer of atmosphere turbulence screen; (b) Second layer of atmosphere turbulence screen. From top to bottom is the original atmosphere aberration, the restoration atmospheric phase, the residual error and the Zernike coefficient before and after reconstruction respectively
图 8 光场相机自适应光学仿真系统
Figure 8. Adaptive optics simulation system based on light field camera
表 1 自适应光学系统闭环控制下远场光斑变化趋势
Table 1. Far field spot distribution changing tendency at closed loop of AO system
Number of iterations 0 1 2 3 Closed loop Number of iterations 4 5 6 7 Closed loop  下载: 导出CSV
下载: 导出CSV
-
[1] Widiker J J, Miller N J, Whiteley M R. Real-time coherent phased array image synthesis and atmospheric compensation testing[C]//Proceedings of SPIE, 2012, 8395: 839505. [2] Carbillet M, Vérinaud C, Femenía B, et al. Modelling astronomical adaptive optics-I. The software package CAOS [J]. Monthly Notices of the Royal Astronomical Society, 2005, 356(4): 1263-1275. doi: 10.1111/j.1365-2966.2004.08524.x [3] 刘思臻, 任德清. 基于YAO软件的太阳地表层自适应光学系统的仿真[J]. 激光与光电子学进展, 2017, 54: 090101. Liu Sizhen, Ren Deqing. Simulation on solar ground-layer adaptive optics system based on YAO software [J]. Laser & Optoelectronisc Progress, 2017, 54: 090101. (in Chinese) [4] 谢晓钢, 张建柱, 岳玉芳, 等. 激光系统组件化仿真软件EasyLaser[J]. 强激光与粒子束, 2013, 25(10): 2536-2540. doi: 10.3788/HPLPB20132510.2536 Xie Xiaogang, Zhang Jianzhu, Yue Yufang et al. EasyLaser: component-based laser system simulation software [J]. High Power Laser and Particle Beams, 2013, 25(10): 2536-2540. (in Chinese) doi: 10.3788/HPLPB20132510.2536 [5] 乔春红, 范承玉, 王英俭, 等. 高能激光大气传输的仿真实验研究[J]. 强激光与粒子束, 2008, 20(11): 1811-1816. Qiao Chunhong, Fan Chengyu, Wang Yingjian, et al. Simulation experiment of high energy laser propagation in the atmosphere [J]. High Power Laser and Particle Beams, 2008, 20(11): 1811-1816. (in Chinese) [6] 孙全, 吕品, 宁禹, 等. 光学系统仿真软件Seelight在自适应光学上的应用[J]. 光电工程, 2018, 45(3): 130-136. Sun Quan, Lv Pin, Ning Yu, et al. Application of optical system simulation software Seelight in adaptive optics [J]. Opto-Electronic Engineering, 2018, 45(3): 130-136. (in Chinese) [7] 宋杰. 太阳多层共轭自适应光学系统性能仿真研究[D]. 北京: 北京理工大学, 2015. Song Jie. The Simulation on Performance of Solar Multi-conjugate Adaptive Optics System[D]. Beijing: Beijing Institute of technology, 2015. (in Chinese) [8] 颜召军, 杨朋千. 层向多层共轭自适应光学系统的模拟[J]. 红外与激光工程, 2016, 45(9): 0918005. doi: 10.3788/IRLA201645.0918005 Yan Zhaojun, Yang Pengqian. Simulation of layer oriented multi-conjugate adaptive optics system [J]. Infrared and Laser Engineering, 2016, 45(9): 0918005. (in Chinese) doi: 10.3788/IRLA201645.0918005 [9] 张烜喆, 王彦, 王佳华, 等. 光场相机在湍流下的清晰成像和点云计算[J]. 红外与激光工程, 2019, 9: 1-7. Zhang Xuanzhe, Wang Yan, Wang Jiahua, et al. Image clarification and Point cloud calculation under turbulence by light field camera [J]. Infrared and Laser Engineering, 2019, 9: 1-7. (in Chinese) [10] Zhang Yu, Tang Qiuyan, Wang Jin, et al. Numerical simulator of atmospherically distorted phase screen for multibeam time-dependent scenario [J]. Applied Optics, 2014, 53(22): 5008-5014. doi: 10.1364/AO.53.005008 -

 点击查看大图
点击查看大图

计量
- 文章访问数: 440
- HTML全文浏览量: 167
- PDF下载量: 72
- 被引次数: 0




