







-
激光制导导弹在现代战争中被广泛使用,在正面战争和反恐局部战争中更是大显身手。按攻击方式有地对地、空对地两种主要方式;按制导方式有主动制导、半主动制导两种方式。激光制导的导弹,在攻击目标时,需要根据目标的回波信号来跟踪目标并最终击中目标。目标的回波信号是来自导弹自身主动发射的激光也可以是另外平台上的激光发射器照射后的散射回波[1-3]。
对于运动目标,要完成对其攻击,一般过程为搜索、发现、跟踪、攻击。所以对激光指引系统就有较高的要求,要具备自动搜索、发现、跟踪的能力,为了提高命中率,则对激光指引系统的目标分辨率和目标跟踪精度就有较高的要求。
有些激光发射器又称作激光搜跟器,其作用是在一定范围内搜索跟踪目标,给导弹提供目标指示,它的搭载平台可以是陆基车载和空基机载。机载激光搜跟器的作用是,随着直升机的飞行,可以搜索航向方向上左右一定视场范围内的目标,如发现目标,直升机可以悬停,激光搜跟器可以对静态或动态目标进行跟踪照射,目标将散射激光,攻击单元此时接收回波信号,并飞向目标进行攻进。
当搭载平台为机载时,激光发射器形式有吊舱结构[4-6],一般采用两轴四框架结构形式完成周视或一定范围内的搜跟,由于吊舱的大小受限,所以搜跟的光学系统尺寸必然受到限制,光学系统入射孔径和焦距也会受到限制,这样会影响光学系统的入射能量和跟踪分辨率[7-9]。光电吊舱形式的搜索范围靠俯仰和方位两框架的形式来实现,需要两套驱动和控制系统,其中一套必然成为另一套的负载,这样必然造成结构尺寸和重量及转动惯量的增加和响应能力的降低[10-12]。
为了简化结构,设计了一款机载激光搜跟器,采用捷联形式安装于飞行器上,采用反射式望远系统,光学系统孔径300 mm,焦距2 100 mm,激光出射和接收共孔径,同时具备发射和接收激光的功能;搜索形式采用双光楔沿光轴串联布置,减小结构尺寸和重量;分别单独控制光楔的旋转,提高控制精度。实现可沿航行方向动态搜索目标,并跟踪目标,搜索方位视场可达±5°,成像角分辨率可达2″。
-
机载激光搜跟器要求可以实现对航进方向上3 km处,500 m范围内,4 m大小目标的识别跟踪。总体要求为焦距f'=2 100 mm,入光和出光孔径D=φ300 mm,视场2ω=±5°,光路总体尺寸小于900 mm。仪器的光学系统由六部分组成[13],激光光源、半透半反镜、APD像面、主镜、副镜、双光楔。
准直系统由于总体尺寸的限制采用卡塞式实现;由于搜索视场要求大,卡塞式准直系统难以实现大视场成像,因此采用双光楔组合来实现出射光的偏转,以实现搜索视场的扩大。光源采用波长1 064 nm激光光源,经过准直扩束后,由双光楔的旋转来实现不同方向出射光的输出,用以搜索航向方向两侧的目标。出射光经目标的散射后,回波经系统成像在APD像面上,从而可以发现目标;当目标移动或静止时,其像斑在像面移动,控制系统根据反馈信号,控制双光楔的旋转,使目标成像始终在像面中心,从而实现对目标的跟踪。其光路结构如图1所示。

图 1 激光搜跟器光路结构
Figure 1. Optical structure of laser tracker
-
光楔是由两面夹角很小的透射面组成,楔角α又称作折射角,材料的折射率nd一般介于1.45~1.7之间,其外形如图2所示。

图 2 单光楔
Figure 2. Single wedge
当入射光沿着光轴z入射时,其出射光在yoz面内偏转,与入射光线的夹角为δ,称作偏向角。当折射角α较小时,其简化计算公式为:
$$ \delta = \left( {{{n - }}1} \right)\alpha $$ (1) 当光楔绕光轴转动时,出射光线也绕着光轴旋转。光楔旋转一周,出射光线回转轨迹形成一个光锥,顶点为出射点,锥轴为光轴。
沿着出射光轴方向,离出射面距离为s,建立一个投影平面,此平面垂直于光轴,如图3所示。
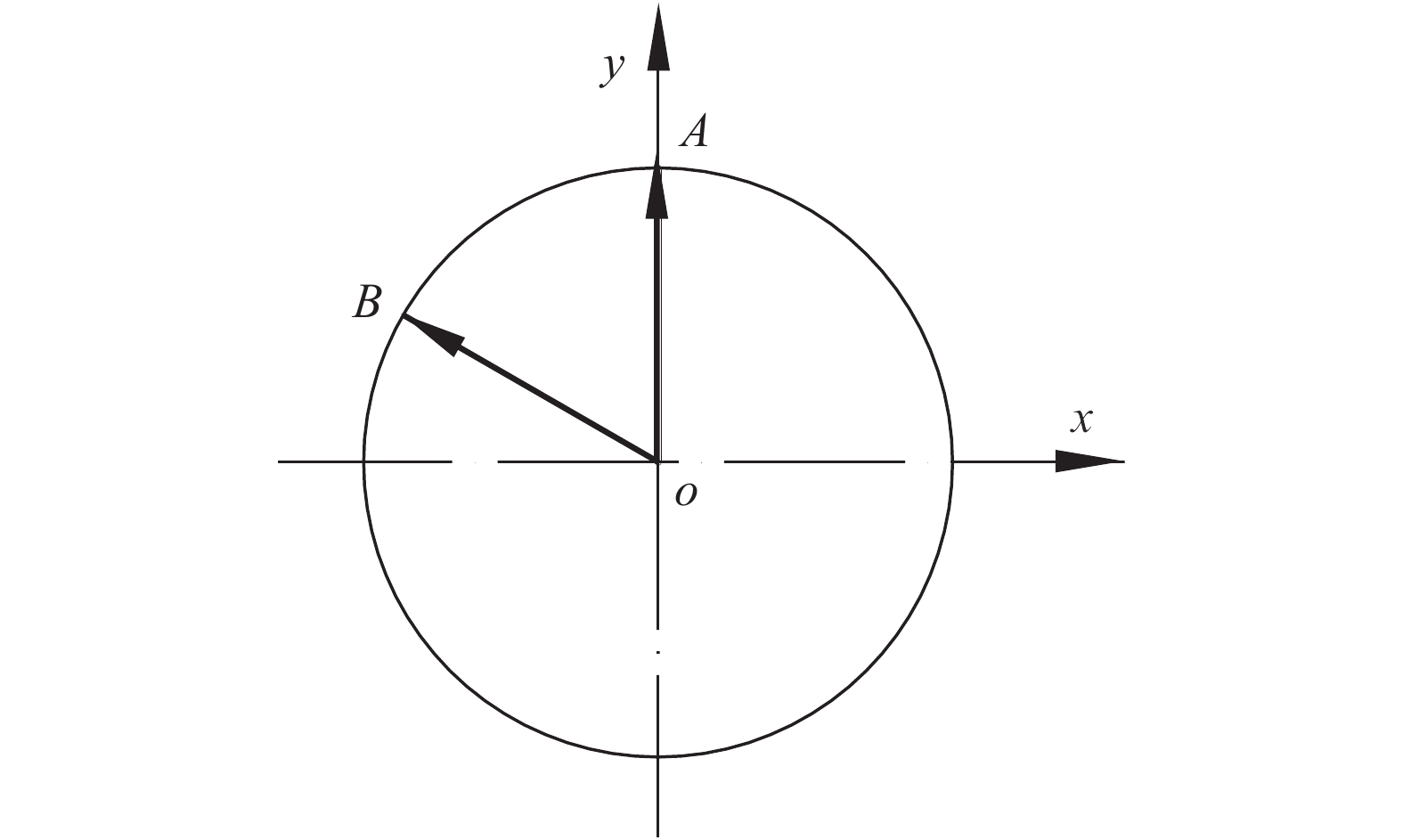
图 3 出射光投影面
Figure 3. Projection plane of outgoing light
其中的圆是出射光线在此投影平面上的入射点轨迹;径向线段为出射光线
矢量在此平面上的投影矢量段。当光楔在图2所示位置时,出射光矢量在此平面上的投影矢量为OA线段。沿着出射光轴方向观察,当光楔顺时针旋转时(定义为正方向),出射光线逆时针旋转,即两者的旋转角度大小相等,方向相反。那么图3中的径向线段OB即为光楔顺时针旋转φ=45°后,出射光线逆时针旋转θ =45°。可以得到出射光线旋转角θ和光楔旋转角φ之间的关系式为: $$ \theta = {\rm{ - }}\varphi $$ (2) 当光楔旋转时,出射光线也绕着z轴反向旋转,出射光线是空间光线,其方向可由对三个坐标轴的方向余弦来确定。因为出射光线的旋转轨迹是个以z轴为旋转轴的光锥,所以其对z轴的方向余弦是不变的。以图2所示状态为光楔的初始状态(φ=0°),当光楔顺时针旋转φ角时,出射光线对x、y、z轴的方向余弦可由下式确定:
$$ \left\{ \begin{aligned} \;&x{c_\varphi } = {\rm{ - }}\cos \left( {{{90}^ \circ } - \delta } \right) \cdot \sin \varphi \\ \;&y{c_\varphi } = \cos ({90^ \circ } - \delta ) \cdot {\rm{cos}}\varphi \\ \;&{\textit{z}}{c_\varphi } = \cos \delta \end{aligned} \right. $$ (3) 设出射光线绕x轴转动的角度为θv,称作俯仰角;出射光线绕y轴转动的角度为θh,称作方位角。当用(θh,θv)来确定出射光线的空间位置时,可以得到出射光线的空间位置角如下式:
$$ \left\{ \begin{aligned} \;&{\theta _v} = {90^ \circ } - \arccos (y{c_\varphi })\\ \;&{\theta _h} = {90^ \circ } - \arccos (x{c_\varphi }) \end{aligned} \right. $$ (4) 由公式(3)和(4)可知,当φ角为0°和180°时,出射光线位于yoz平面内;当φ角为90°和270°时,出射光线位于xoz平面内。
设楔角α=30′,nd =1.5,则δ=15′;当光楔旋转一周,出射光线也反向旋转一个光锥,在几个特殊点的方位和俯仰角如表1所示。
表 1 出射光空间方向位置角
Table 1. Direction of the outgoing light in space
Item Value φ/(°) 0 30 90 135 180 θv/(′ ) 15 13 0 −11 −15 θh/(′ ) 0 −8 −15 −11 0 由表1可以得出,光楔旋转0°~180°时,出射光线的俯仰和方位角也随着变化,表中的正负号,代表方向,定义俯仰角向上偏转为正,定义方位角向右偏转为正。俯仰角从上仰15′变化到下俯15′,方位角从0′变化到右方位15′,再回到0′。
在许多测试中,需要出射光线只做俯仰或方位偏转,那么用单光楔就无法实现。前面分析可知,光楔的旋转与出射光线的旋转是反向的,所以可以采用两个位置对于xoy面镜像的光楔,等角度反向旋转,可以使经过前一个光楔的出射光线顺时针转,经过后一个光楔的出射光线反时针转,则两次转动偏量相互抵消,就可以实现出射光线只做俯仰或方位偏转,双光楔如图4所示。
如图4(a)所示为初始状态,当两光楔相对反方向旋转180°后,出射光线则只在yoz面内绕x轴旋转至图4(b)所示位置;两光楔相对反方向旋转360°后,回到初始位置,俯仰角变化范围±δ;出射光线的偏向角δ按下式来计算。
$$ \delta = 2\left( {n - 1} \right)\alpha \cos \varphi $$ (5) 如仅得到方位的偏角±δ,只需将双光楔组,按图4所示状态,同向旋转90°,以此时位置为初始位置,重复上述过程即可。无论光楔是顺时针还是逆时针转动,出射光线总是按上下或左右摆转。
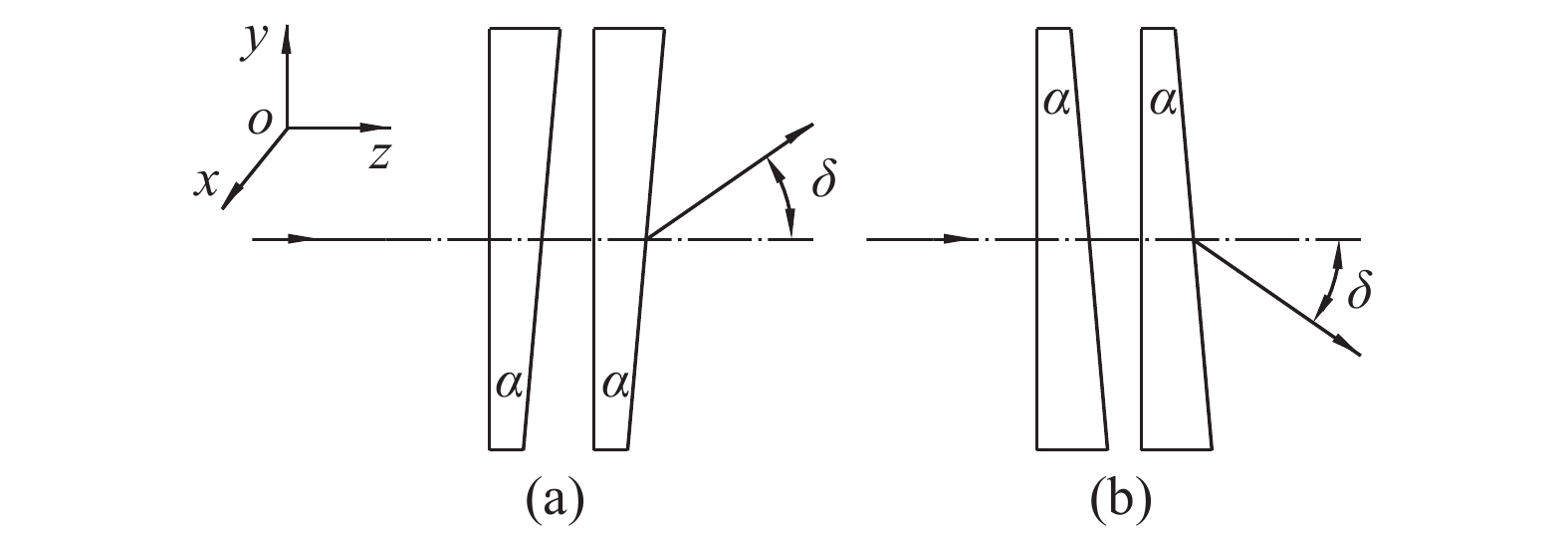
图 4 双光楔
Figure 4. Double wedges
-
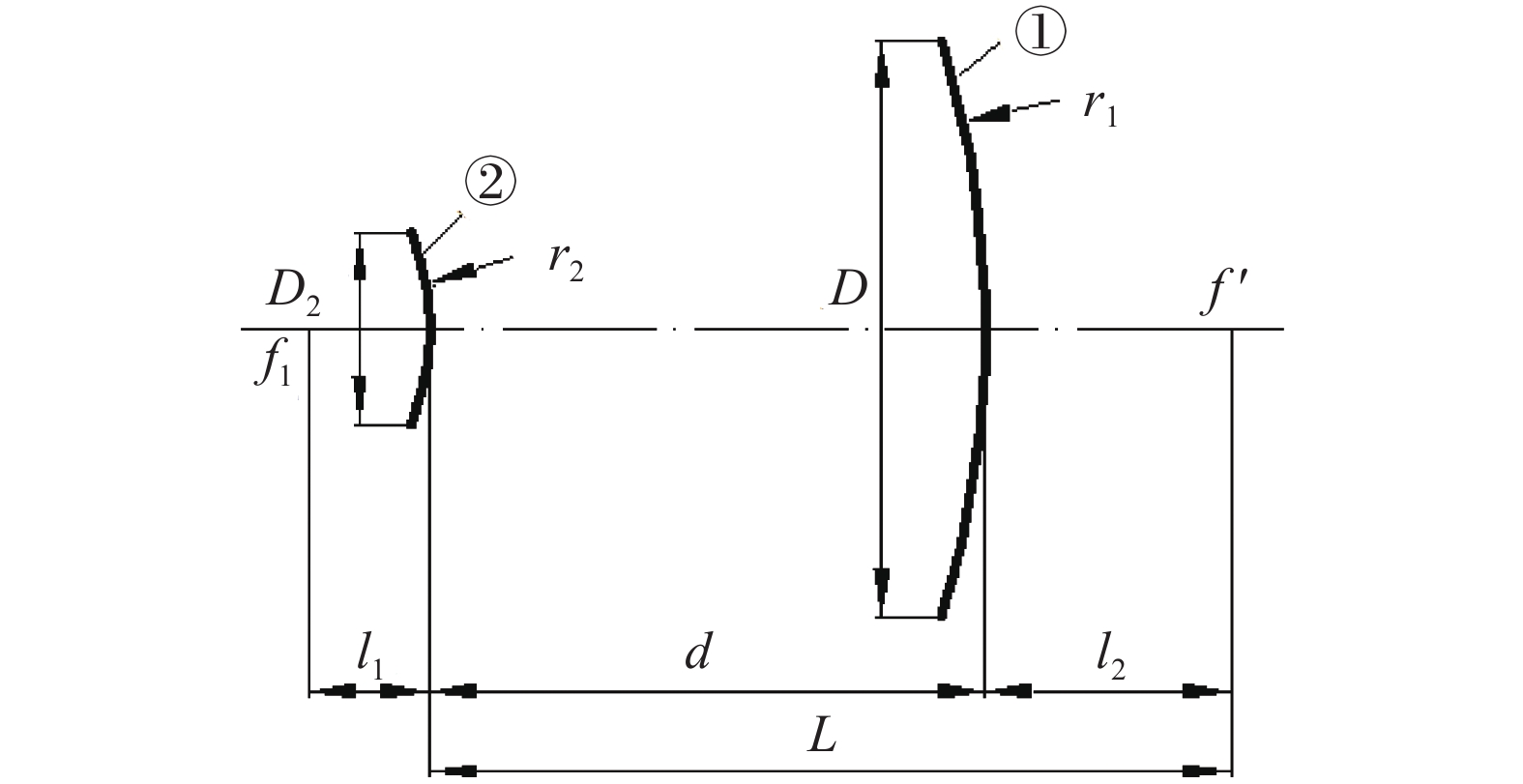
准直系统设计指标为焦距f'=2100 mm,入光孔径D=φ300 mm,成像视场2ω=±0.08°。确定采用反射式的结构形式[14],如图5所示。
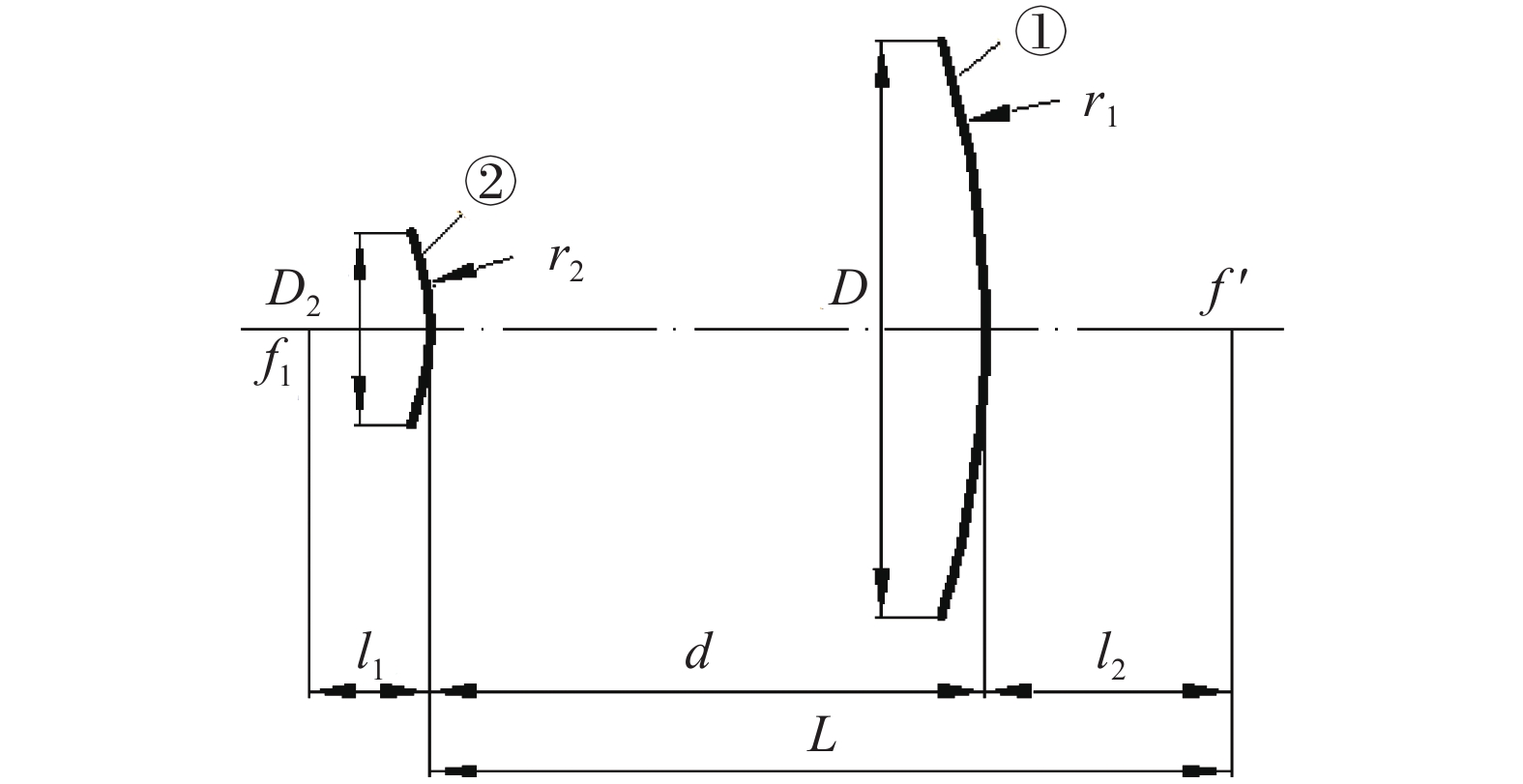
图 5 系统结构参数
Figure 5. Structure parameters of system
系统由两反射镜组成:① 为主镜,② 为副镜。主镜和副镜的面型通常为轴对称旋转双曲面。其中,D为主镜孔径,D2为副镜孔径,d为主副镜的间隔,f1为主镜焦点位置,f ′为系统焦点位置,L为系统总长。由于副镜的中心遮挡,使用遮光比的概念来量化被遮挡的光束量,用符号p表示遮光比,记作:
$$ p = \frac{{{r_1} + 2d}}{{{r_1}}} \approx \frac{{{D_2}}}{D} $$ (6) 系统焦距f'可用公式(7)表示:
$$ f' = \frac{{{r_1}{r_2}}}{{2{r_1} - 2{r_2} + 4d}} $$ (7) 系统总长L可用公式(8)表示:
$$ L = \frac{{2{r_2}d + {r_1}{r_2}}}{{2{r_1} - 2{r_2} + 4d}} $$ (8) 以上三式中计算时,d取正值,r1、r2取负值。根据总体要求,p = 0.25,f ′=2 100 mm,L小于900 mm,取L=525 mm,由以上方程,可求得r1=800 mm;r2=247 mm;d =300 mm。由图5的几何关系可知后工作距l2 = L−d =225 mm,满足结构和焦面分划板的安装要求。在确定好以上参数后,就可进行光学设计和优化。
在光学设计领域,很多元件的面型采用二次曲面,这是由其特性所决定的。二次曲面的基本特性是:二次曲面上任一点的法线,平分连接二次曲面的两个焦点的半径所形成的角。由此可以得出以下结论:以一个焦点为光源发出的光线,汇聚于另一个焦点处,从而形成这个光源的理想像。当反射镜采用旋转对称二次曲面时,反射镜的面型方程可以用二次曲面的顶点方程来定义,可用公式(9)表示:
$$ {\rho ^2}{\rm{ - }}2R{\textit{z}} + (1 - {e^2}){{\textit{z}}^2} = 0 $$ (9) 式中:R为顶点处的曲率半径;e为二次曲面的偏心量;ρ为曲面的半径;z为曲面的矢高。z可用公式(10)表示:
$$ {\textit{z}} = \frac{{R - \sqrt {{R^2} - (1 + k){\rho ^2}} }}{{1 + k}} $$ (10) 式中:k为二次曲面常数,k = −e2,当k取不同值时,二次曲面的类型如表2所示。
表 2 二次曲面常数对应的面型
Table 2. Surface shape corresponding to the quadric coefficient
Quadric coefficient k<−1 k=−1 −1<k<0 K=0 Surface type Hyperboloid Paraboloid Ellipsoid Sphere 主镜采用抛物面,副镜采用双曲面,副镜的一个焦点与主镜的焦点重合,则组合系统的焦点位于主镜后方,如图5所示。这种形式称作卡塞格林系统,该设计方案的初始结构形式采用卡塞式,首先根据总体指标要求计算初始结构参数,并在zemax中建模,经过优化后得到光路结构参数如表3所示,光路如图1所示。
表 3 光路结构参数表
Table 3. Structure parameters of R-C system
Surface Radius/mm Thickness/mm Glass Diameter/mm Conic Comment OBJ Infinity Infinity Object plane STO Infinity 30 300 Entrance pupil 2 Infinity 30 BK7 300 Optical wedge 3 Infinity 20 300 Optical wedge(Tilt x:5°) 4 Infinity 30 BK7 300 Optical wedge 5 Infinity 350 300 Optical wedge(Tilt x:5°) 6 −800 −300 Mirror 300 −1.024 281 Primary mirror 7 −247.058 8 445 Mirror 77 −2.348 9511 Secondary mirror 8 Infinity −113 Mirror 26 Half mirror(Tilt x:−45°) 从结构参数表可以看出:系统的结构形式由卡塞式优化成了R-C式,系统的总长为685 mm,小于900 mm的要求,入瞳孔径为φ300 mm,焦距为2 100 mm,系统的入射光是1.064 μm的激光,则系统的艾里斑直径为18.23 μm。图6和图7分别为入射成像系统的点列图和MTF图。

图 6 点列图
Figure 6. Spot diagram
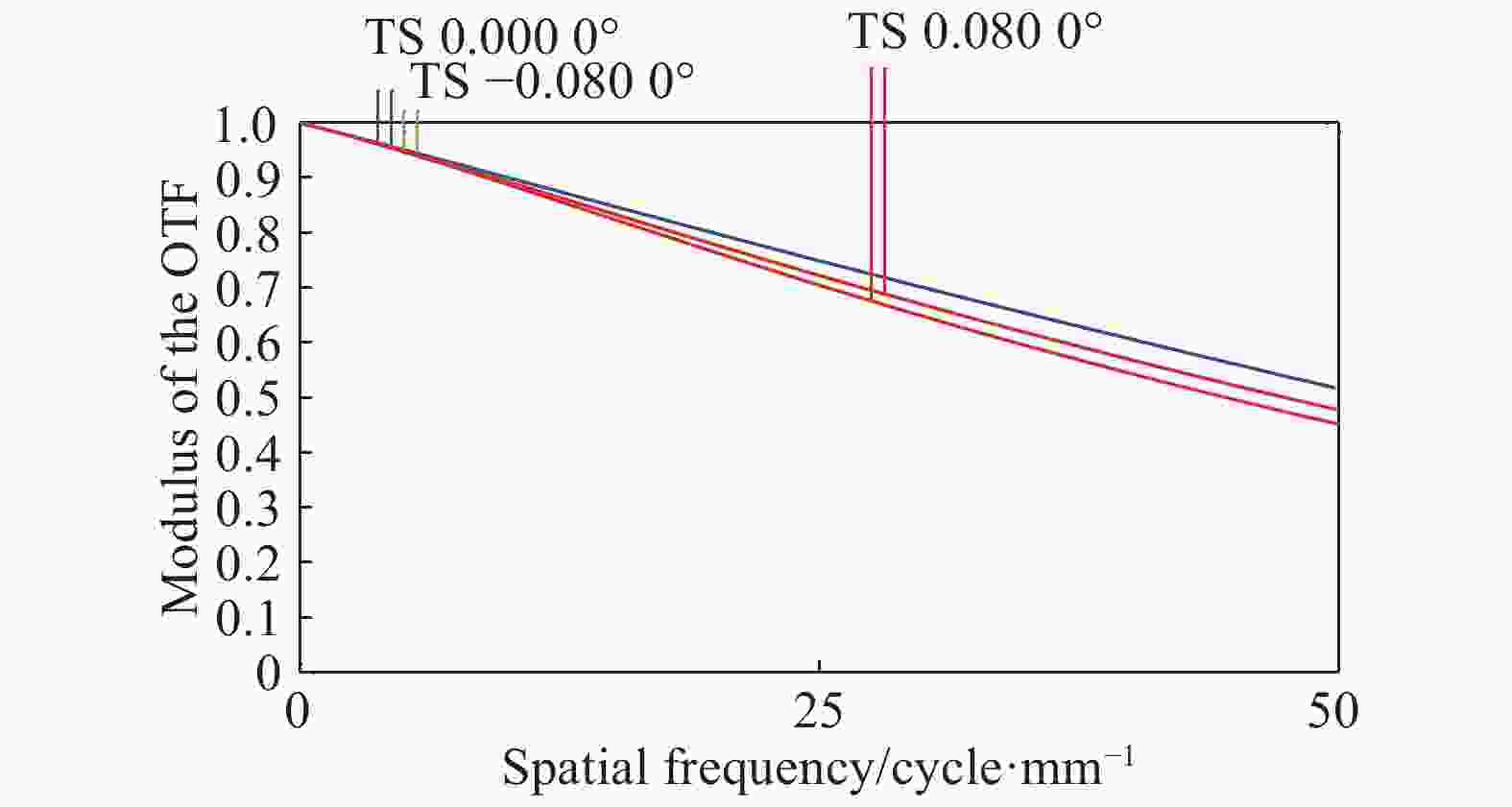
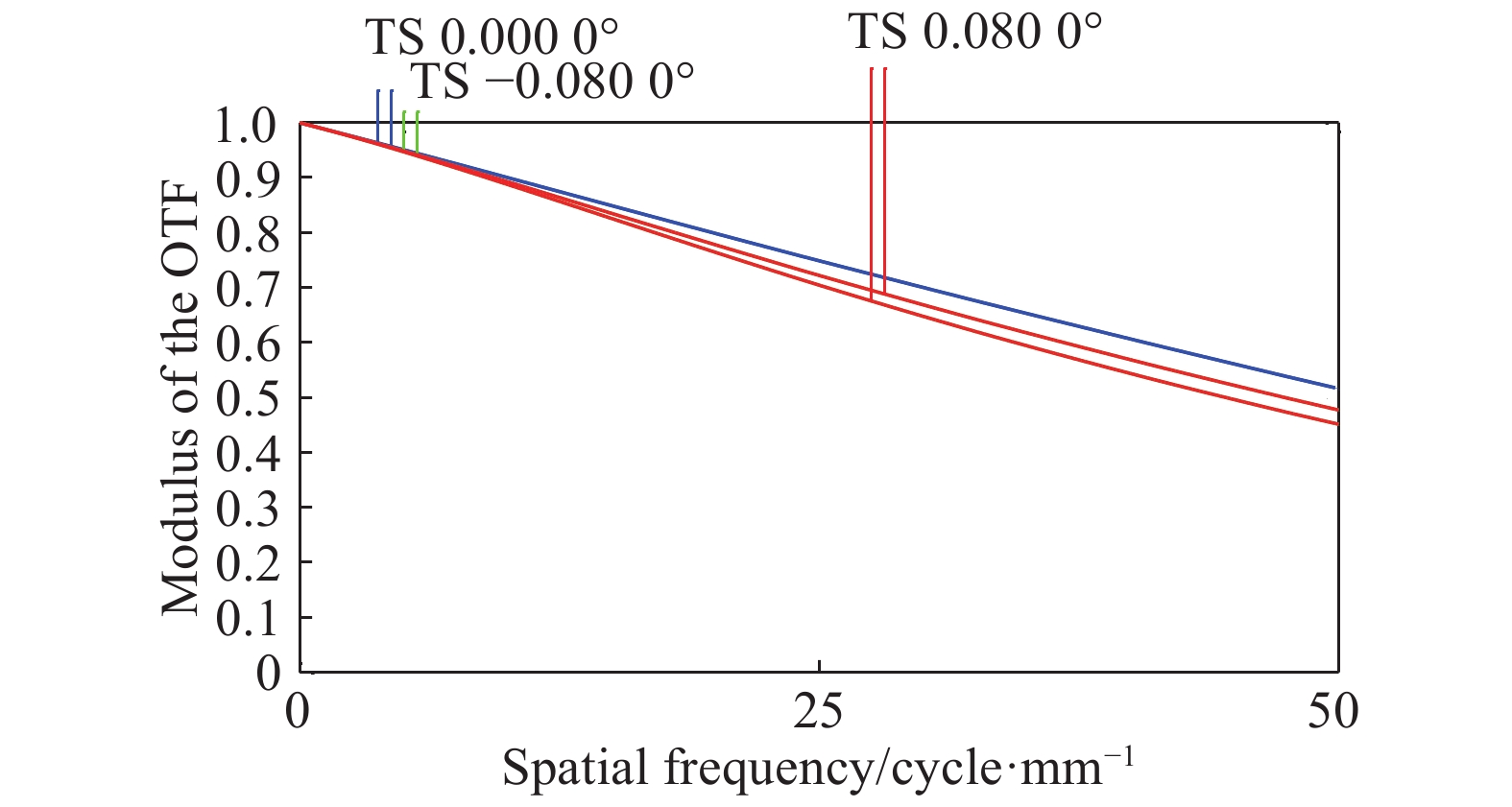
图 7 空间频率调制图
Figure 7. Diagram of spatial frequency modulation
图6中的圆圈是艾里斑的大小,其中(a)~(d)图中光斑大小分别为2.288、1.125、1.121、2.417 μm。图6(a)、6(b),是在两光楔位置等效为平板玻璃时,对0°扫描视场(沿航向方向,与光轴平行)成像点的弥散斑,其成像视场为±0.08°;图6(c)、6(d),是在两光楔位置如图4所示时,对5°扫描视场(与光轴的夹角为5°)的入射光,经光楔偏转后,光线与光轴平行入射,成像点的弥散斑,其成像视场为±0.08°。由图可知,在扫描视场±5°范围内,可对±0.08°的视场所成像的光斑小于衍射极限的艾里斑,是成了完善像。
由图7系统的MTF可知,在50 lp/mm时,在成像视场±0.08°范围内,其对比度均高于0.4。因此,当像面接收器像元大小为20 μm,系统焦距为2 100 mm时,其成像分辨率为2″。在搜跟器作用距离为3 km时,当汽车、坦克、建筑物(>4 m)作为目标时,系统可以在±0.08°视场(对应8 m)对其成完善像,并有良好的识别性,有利于系统对其跟踪。
-
将双光楔系统放置在准直系统出口的前方,通过双光楔的相对旋转,就可以调节准直系统出光的偏转方向,实现扫描目标的目的。按照总体要求,视场2ω=±5°,所以在设计计算时,光楔的楔角α=5°,由于楔角比较大,所以计算偏向角δ时得按下式计算。
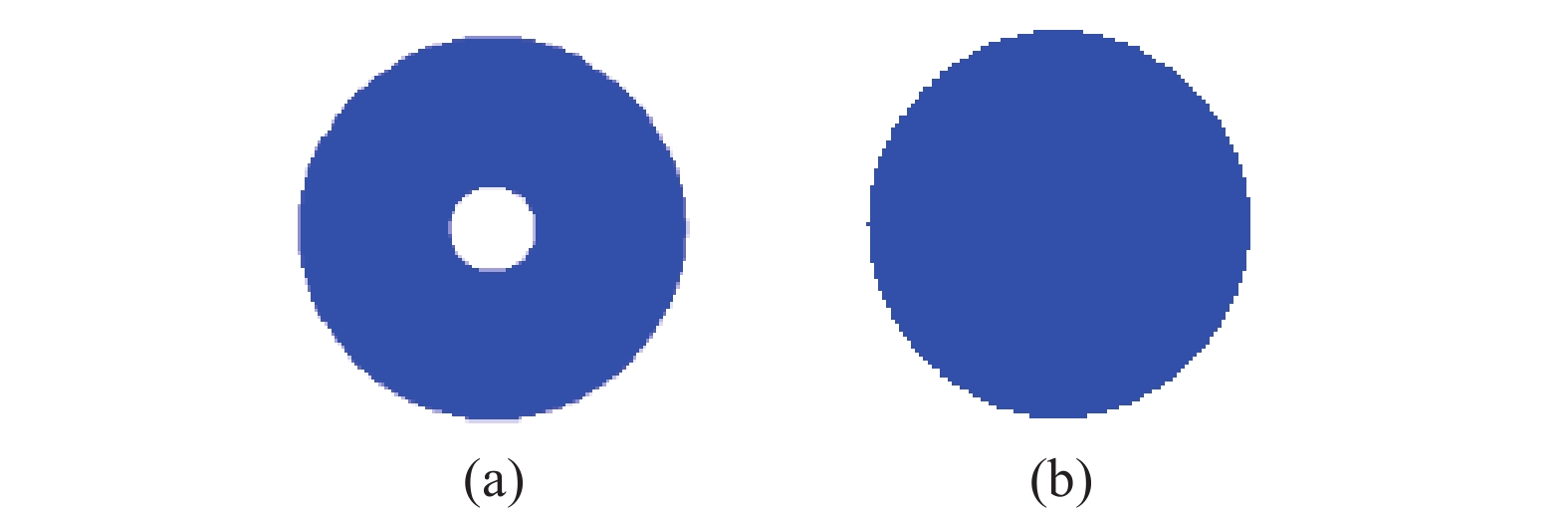
$$ \left\{ \begin{aligned} \;&\sin {I_1} = n\sin {{I\;'}_1}\\ \;&I{}_2 = {{I\;'}_1} - \alpha \\ \;&\sin {{I\;'}_2} = n\sin {I_2}\\ \;&\delta = {I_1} - I'{}_2 - \alpha \end{aligned} \right. $$ (11) 式中:I1、I1′、I2、I2′是入射光线对第一块光楔和第二块光楔的入射角和出射角。以表3的结构参数为基础,将准直系统光路倒置,得到系统光路如图1所示。由图1可知,光线出射后,发生偏转,偏转的角度由光楔折射角和光楔的相对转角确定。出射光的光束截面形状如图8所示。其中图8(a)是1 m投影面处光束截面形状,光斑直径φ300 mm,副镜挡光明显,图8(b)是3 km投影面处光束截面形状,光斑直径φ46 m,可以看出,副镜的挡光几乎没有影响,这样则有利于激光束的扫描。
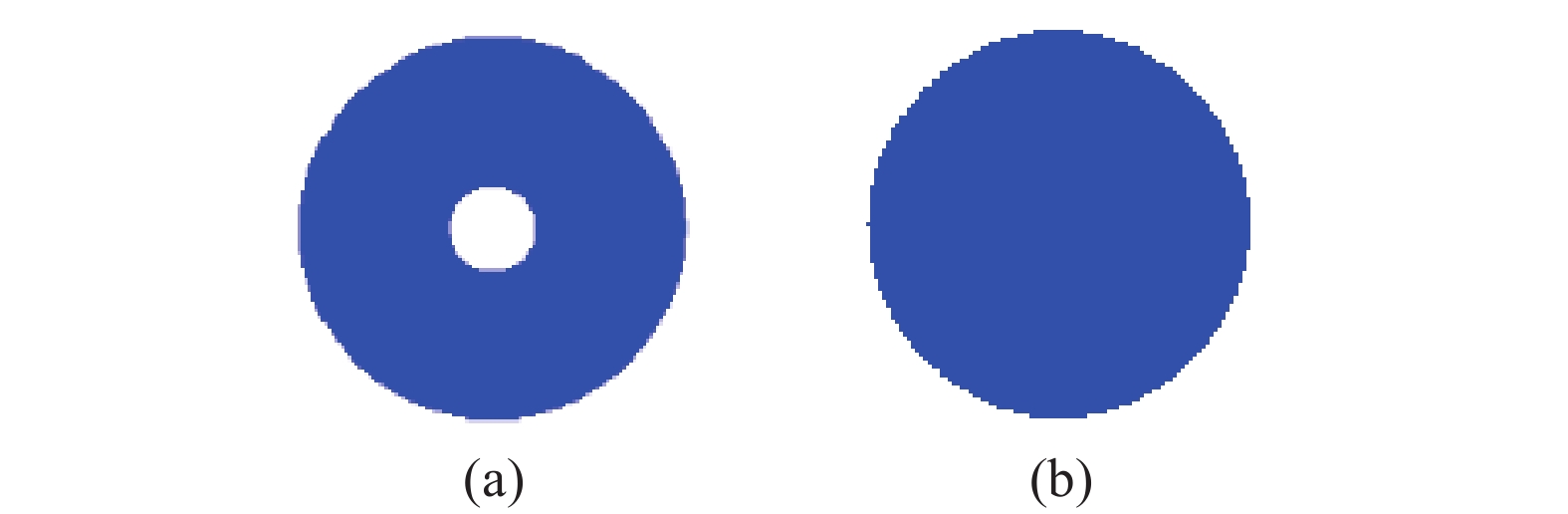
图 8 出射光截面形状
Figure 8. Shape of the outgoing light cross section
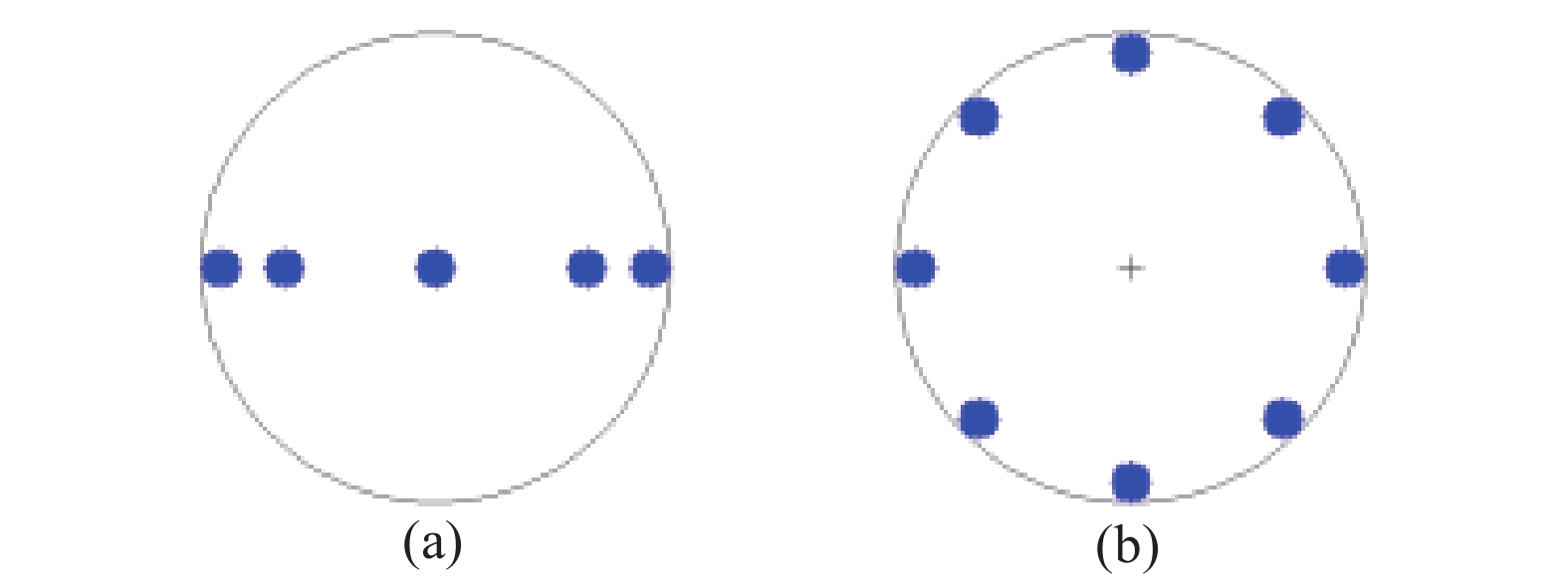
出射光束的偏转角由光楔的相对位置角决定,在使用时,有两种状态。由于是机载扫描装置,空对地的扫描方式,主要是要实现左右即方位的扫描,这时两个光楔反方向旋转相同的角度,可以控制出射光扫描范围为±5°视场。假设在某一高度对前方3 km处进行扫描,则可扫描范围为526 m,如图9所示。
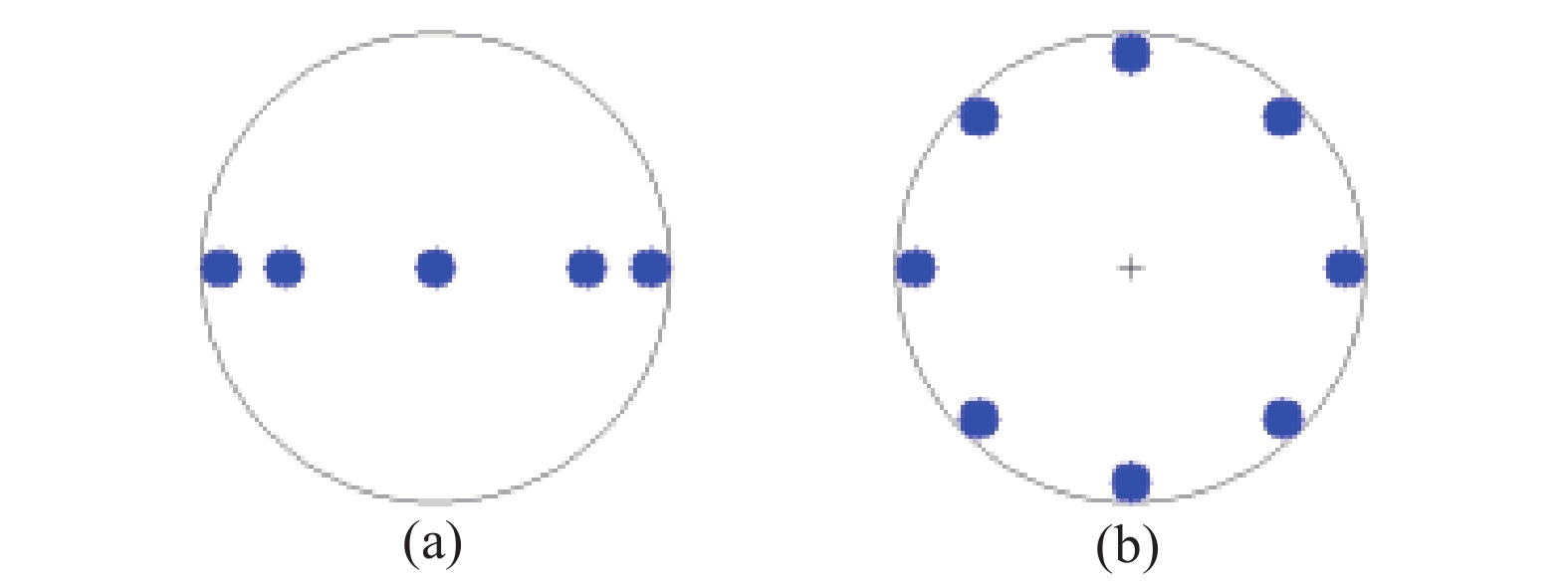
图 9 扫描形式
Figure 9. Scanning form
图9(a)是直线扫描方式,其中的光斑位置从左到右分别是两光楔相对转角分别为(0°,0°),(45°,−45°),(135°,−135°),(180°,−180°)时,光斑所扫描的位置,圆圈的直径范围即是扫描的范围,随着飞行器的行进,就可以扫描一个宽度为526 m的矩形范围(作用距离为3 km时)。光斑的大小由距离和出射光的发散角决定。当要实现环形扫描时,两光楔同时同向旋转相同角度即可,如图9(b)所示。不论哪一种扫描方式,配合飞机的航行,都可完成区域的扫描。
-
提出了一种空对地目标的搜跟方法,阐述了机载激光搜跟器的工作原理,论述了光楔对出射光的旋光效应,并推出光楔旋转角和出射光线偏转角的数学公式,以及出射光线的空间位置角表达式,提出了共孔径的激光搜跟器总体方案。采用大孔径、大焦距反射式R-C望远系统,激光出射和接收共孔径,同时具备发射和接收激光的功能;搜索形式采用双光楔沿光轴串联布置在系统出光口处。并对光学系统进行了设计,当系统通光孔径为φ300 mm,焦距为2 100 mm时,总体尺寸为685 mm;双光楔的折射角采用5°,可实现扫描搜索视场为±5°;成像视场为±0.08°,成像点弥散斑最大为2.417 μm,系统MTF值在50 lp/mm时大于0.4,满足成像要求;当目标距离为3 km时,可搜索范围达到526 m,可实现对4 m大小目标的清晰成像,成像分辨率为2″。
Optical design of a laser tracker
-
摘要: 为提高激光搜跟器对地目标的搜索范围和成像分辨率,提出了一种机载平台下的共孔径激光搜跟器扫搜和跟踪目标的方法,并进行了光学系统的设计。激光搜跟器采用捷联的方式固定于飞行器上,提高了其稳定性;激光的出射和回波的接收,采用共孔径的R-C式反射望远系统实现,缩小了其整体尺寸,并提高了成像分辨率;扫描搜索目标采用双光楔组件实现,并提高了搜索频率和扩大了搜索视场;给出了双光楔旋转角和出射光偏转角之间的关系。设计结果表明,当系统通光孔径为φ300 mm,焦距为2 100 mm时,总体尺寸为685 mm,可扫描搜索视场为±5°,成像视场为±0.08°,成像点弥散斑最大为2.417 μm,系统MTF值在50 lp/mm时大于0.4,满足成像要求;当目标距离为3 km时,可搜索范围达到526 m,可实现对4 m大小目标的成像,成像分辨率为2″。Abstract: In order to improve the search range and imaging resolution of the ground target by the laser tracker, a method of searching and tracking the target with a common aperture laser tracker under an airborne platform was presented and the optical system was designed. The laser tracker was fixed on the aircraft by strap down, its stability was improved. The R-C reflection telescopic system with common aperture was adopted to emit the laser and receive laser echoes, which reduced the overall size and improved the imaging resolution. The scanning search target was realized by double optical wedge component, and the search frequency was increased and the search field of view was enlarged. The relationship between the rotation angle of double optical wedge and the angle of outgoing optical deflection was given. The design results show that when the aperture of the system is φ300 mm and the focal length is 2 100 mm, the overall size is 685 mm, the search and scan field of view is ±5°, the imaging field is ±0.08°, the maximum size of the imaging spot speckle is 2.417 μm, and the MTF value of the system is greater than 0.4 at 50 lines per millimeter, which meets the imaging requirements. When the target distance is 3 km, the searchable range reaches 526 m, and the four-meter-sized target can be recognized with a imaging resolution of two seconds.
-
Key words:
- laser tracker /
- R-C telescopic system /
- double optical wedge
-
表 1 出射光空间方向位置角
Table 1. Direction of the outgoing light in space
Item Value φ/(°) 0 30 90 135 180 θv/(′ ) 15 13 0 −11 −15 θh/(′ ) 0 −8 −15 −11 0  下载: 导出CSV
下载: 导出CSV
表 2 二次曲面常数对应的面型
Table 2. Surface shape corresponding to the quadric coefficient
Quadric coefficient k<−1 k=−1 −1<k<0 K=0 Surface type Hyperboloid Paraboloid Ellipsoid Sphere
下载: 导出CSV
表 3 光路结构参数表
Table 3. Structure parameters of R-C system
Surface Radius/mm Thickness/mm Glass Diameter/mm Conic Comment OBJ Infinity Infinity Object plane STO Infinity 30 300 Entrance pupil 2 Infinity 30 BK7 300 Optical wedge 3 Infinity 20 300 Optical wedge(Tilt x:5°) 4 Infinity 30 BK7 300 Optical wedge 5 Infinity 350 300 Optical wedge(Tilt x:5°) 6 −800 −300 Mirror 300 −1.024 281 Primary mirror 7 −247.058 8 445 Mirror 77 −2.348 9511 Secondary mirror 8 Infinity −113 Mirror 26 Half mirror(Tilt x:−45°)
下载: 导出CSV
-
[1] Gong Dun. Review on mapping space remote sensnor opticalsystem [J]. Chinese Optics, 2015, 8(5): 714-724. (in Chinese doi: 10.3788/co.20150805.0714 [2] Zhang Tengfei, Zhang Hexin, Hui Junjun, et al. A rviewon development and application of laser weapons [J]. Electronics Optics & Control, 2015, 22(10): 62-67. (in Chinese [3] Zhang Jian, Zhang Lei, Zheng Fei. Development status of airborne 3D imaging radar systems [J]. Chinese Optics, 2011, 4(3): 213-232. (in Chinese [4] Li Gang, Wang Yuefeng, Dong Wei, et al. Digital method to checkout complete appliance of laser radiation indicating meter [J]. Infrared and Laser Engineering, 2004, 33(5): 462-464. (in Chinese [5] Meng Lixin, Zhang Lizhong, Li Xiaoming, et al. A helicopter-borne stable pod for high voltage electricity-line-cruising [J]. Automation of Electric Power System, 2012, 36(21): 113-116. (in Chinese [6] Zhou X Y, Li Y, Mu Q Q. Control system of stabilized pod mixed with automatic tracking and manual manipulation [J]. Chinese Journal of Scientific Instrument, 2014, 35(6): 27-33. [7] Yang H T, Gao H B, Liu X. On-axis tracking technology based on the dual extended Kalman filter [J]. Infrared and Laser Engineering, 2016, 45(5): 0531001. (in Chinese doi: 10.3788/irla201645.0531001 [8] Li Kai, Yao Hongping. Study on capture process control technology optic-electronic tracker [J]. Laser & Infrared, 2009, 39(5): 518-520. [9] Cao Changdong, Ji Yunfei, Geng Lin. Source analysis of laser angle tracking error [J]. Laser & Infrared, 2009, 39(5): 480-482. (in Chinese [10] Zhang J, Wang H L, Gai W D. Ground target tracking method research based on adaptive estimation for electro-optical platform [J]. Journal of Beijing University of Aeronautics and Astronautics, 2010(12): 1465-1468. (in Chinese [11] Fang Ch Y, Lim X, Ch E Y, et al. Study on boresight stabilized technology of vehicle photoelectric reconnaissance platform [J]. Opt Precision Eng, 2018, 26(2): 410-417. (in Chinese doi: 10.3788/OPE.20182602.0410 [12] Ji Sh P. Equipment development of airborne electro-optic pay load an ditskey technologies [J]. Aero Weaponry, 2017(6): 3-12. (in Chinese [13] Liu Zhiying, Xing Tianxiang. Laser semi-active seeker optical system design [J]. Laser & Infrared, 2016, 46(5): 527-531. (in Chinese [14] Ma Lie, Chen Bo. Optical design of a co-aperture system for 3-D remote sensing payload [J]. Opt Precision Eng, 2018, 26(9): 2328-2330. (in Chinese -

 点击查看大图
点击查看大图

图(9) / 表(3)
计量
- 文章访问数: 1604
- HTML全文浏览量: 779
- PDF下载量: 102
- 被引次数: 0












