









-
深空探测是指对月球及更远的天体或空间目标开展的探测活动,月球探测是深空探测的起点[1]。月球激光测距是精确测量地面测站与放置在月面上的角反射器阵列之间的距离,测量数据对精确测定地球自转参数、地心引力常数、地面观测站的地心坐标改正、地月系的质量数据测量、等效性原理的验证等有重要作用[2]。目前,月面上有五个角反射器阵列(Apollo11、Apollo14、Apollo15、Lun17、Lun21),五个角反射器阵列尺寸最大的是1.05 m×0.64 m的Apollo15[3]。中国科学院云南天文台(下简称云南天文台)在2018年1月22日成功探测到Apollo15的回波信号,在国内首次成功实现月球激光测距[4]。增加激光测距回波率是提高激光测距数据质量的重要手段之一。地球与月球之间的平均距离约38.4万公里,同时受到激光发散角、大气抖动、望远镜跟踪等因素的影响,接收到的回波光子数只有单光子水平,因此,在月球激光测距过程中,需要激光束准确地指向月面的反射器阵列[5]。观测过程中,在没有回波数据或者回波数较少时,需要不断控制望远镜进行搜索,但这种搜索方法存在搜索步长太大、速度较慢、定位精度不高等缺点,因此需要新的搜索方法。
摆镜从20世纪80年代研制成功以来,目前广泛应用在激光通信跟瞄、自适应光学精跟踪、图像稳定等领域。它具有定位精度高、响应速度快等优点。
文中根据摆镜工作原理及优点,设计了基于云南天文台1.2 m望远镜月球激光测距平台的激光指向快速高精度控制系统,利用摆镜精确控制光束传播方向。首先对系统进行了仿真分析,然后开展测距卫星观测试验,以验证该方法的可行性。
-
摆镜又称快速反射镜(Fast Steering Mirror),由驱动元件、反射镜、基座、支撑结构、位置检测装置和控制系统组成。摆镜工作时,通过控制器控制驱动元件来推动反射镜绕两轴偏转,调整光束传播方向,位置检测装置实时反馈偏转角度,确保定位精度。按照驱动元件的不同分为压电陶瓷驱动摆镜和音圈电机驱动摆镜。工作原理如图1所示[6]。
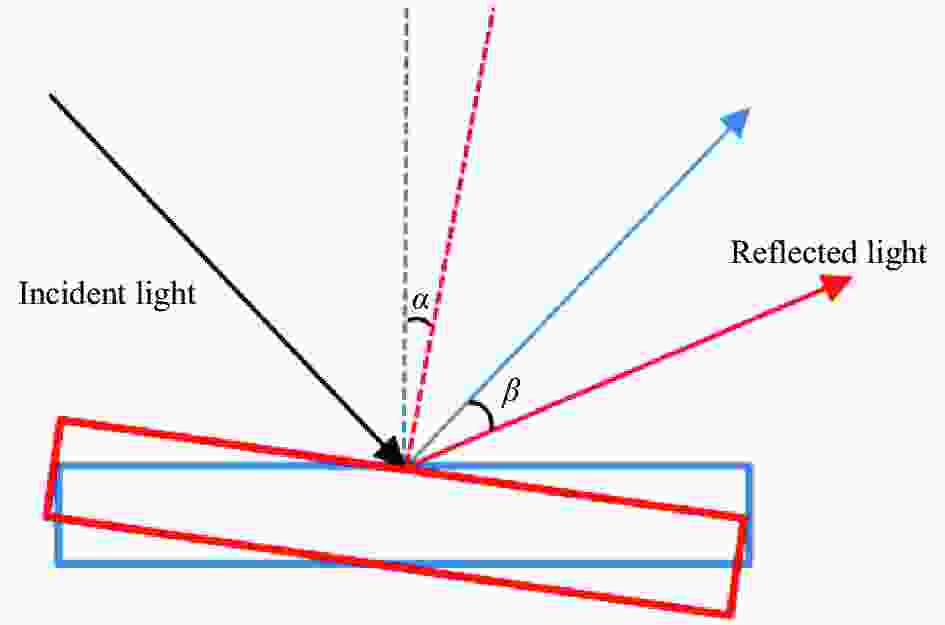
图 1 摆镜工作原理
Figure 1. Working principle of tip/tilt mirror
图1中蓝色为反射镜初始位置、法线方向和反射光,红色为摆镜偏转角度α后的反射镜位置、法线方向和反射光,反射光偏转了角度β,由反射原理可得:
$$ \mathrm{\beta }=2\mathrm{\alpha } $$ (1) 依据摆镜的工作原理,将其应用到激光测距发射光路中,可以通过摆镜两个方向角度的高精度快速偏转来控制激光光束的发射方向。
-
图2为云南天文台1.2 m激光测距望远镜系统与光路图[4],该系统是收发共光路系统,收发转换由一面两侧开孔的可旋转反射镜(转镜)实现,发射激光时,通过转镜小孔出射,接收回波时,转镜将回波光束反射到单光子探测器接收光路中。

图 2 摆镜在激光测距光路中的位置
Figure 2. Tip/tilt mirror in laser ranging optical path
在观测过程中,没有收到回波信号或者回波信号较弱时,可移动望远镜的方位和俯仰两轴来搜索,但由于望远镜转动惯量太大,在进行小范围内小步长的搜索时精度不高、速度较慢,这里使用摆镜技术来弥补这一不足,摆镜的转动惯量较小,可以在很短时间内完成小步长的搜索。
摆镜扫描系统是将图2中激光器与转镜之间的反射镜替换为摆镜(反射镜和摆镜的直径相同,均为50 mm),利用摆镜控制发射激光光束偏转来配合望远镜进行高分辨率高精度搜索。系统采用PI公司的 S330.4 SL压电陶瓷偏摆台,并将一块50 mm直径的反射镜粘在偏摆台上。偏摆台具体参数如表1所示。
表 1 偏摆台参数
Table 1. Tip/tilt platform parameter
Actuator Piezoelectric Tilt angle/mrad 5 Full-range repeatability/μrad 0.5 Resonant frequency/Hz 3.3±20% 结合偏摆台参数和公式(2)计算得到该摆镜的转动惯量为
${I}_{m}=5\;514.6\;{\rm{g}}{ \cdot {\rm{mm}}}^{2}$ 。$$ {I}_{m}=m\left[\frac{3{R}^{2}+{H}^{2}}{12}+{\left(\frac{H}{2}+T\right)}^{2}\right] $$ (2) 式中:m、R、H分别是摆镜镜片的质量、半径、厚度。
摆镜控制系统包括计算机、控制器、位置传感器、压电陶瓷驱动器与反射镜。计算机与控制器使用RS-232串口通信,控制器将信号放大后控制驱动器两轴偏转,并接收驱动器的位置反馈信号提高定位精度,控制框图如图3所示。

图 3 摆镜扫描系统控制框图
Figure 3. Control diagram of tip/tilt scanning system
在望远镜接收到回波信号但回波信号较弱时,摆镜扫描系统工作,控制摆镜以设定扫描方式进行高精度扫描,使发射光束在小范围内以较小步长来搜索,从而找到回波较强的位置,提高回波率。
这种方法与使用望远镜搜索的方法相比,具有定位精度高、分辨率高和单步速度快的优点。
-
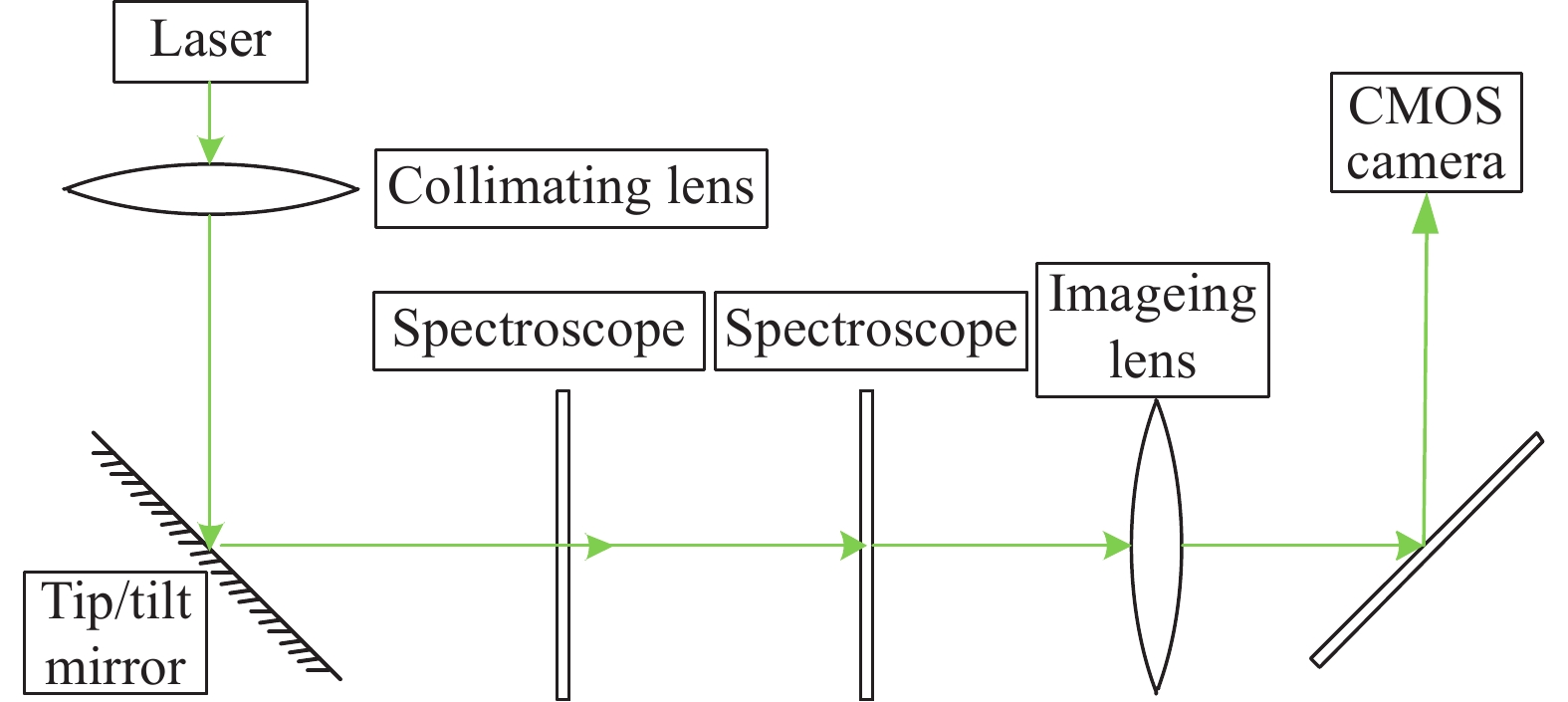
为测试系统的搜索分辨率,在云南天文台1.2 m望远镜激光测距接收光路中搭建试验测试平台,如图4所示,在接收光路与望远镜主光路之间加入激光光源和摆镜,试验时,控制摆镜两轴偏转使光束偏移,在光路系统中使用HAMAMATSU公司的ORCA-Flash4.0 V3 C13440-20 CU数字sCMOS相机成像(像元尺寸为6.5 μm×6.5 μm),提取光斑图像质心计算光斑在相机靶面上的移动像素数[7],从而得出实际偏移量。

图 4 摆镜试验光路示意图
Figure 4. Schematic of tip/tilt experiment optical path
其中,成像镜焦距为1000 mm,相机像元尺寸为6.5 μm,因此,相机的比例尺为:
$$ {r}=\frac{u}{f}=1.34″ $$ (3) 由于摆镜分辨率小于1″,单步偏转量无法通过计算获得,因此,试验中分别控制摆镜X轴与Y轴以最小步长连续偏转100步,偏转完成后保存两幅图像。
处理两幅图像后得到X轴方向偏转22.158″,平均每步偏转0.222″,Y轴方向偏转20.327″,平均每步偏转0.203″。因此,该摆镜X轴分辨率为0.222″,Y轴分辨率为0.203″。扫描系统设计方案中激光光束通过摆镜偏转后将再经过扩束系统(将放大约41.7倍),因此,使用摆镜进行搜索时,实际出射光指向变化最小步长可以达到0.005″,对应激光光斑在月面上的最小移动距离小于10 m。
同时,压电陶瓷偏摆台有响应速度快的优点,试验中使用的PI-S330偏摆台工作频率在100 Hz以上。
-
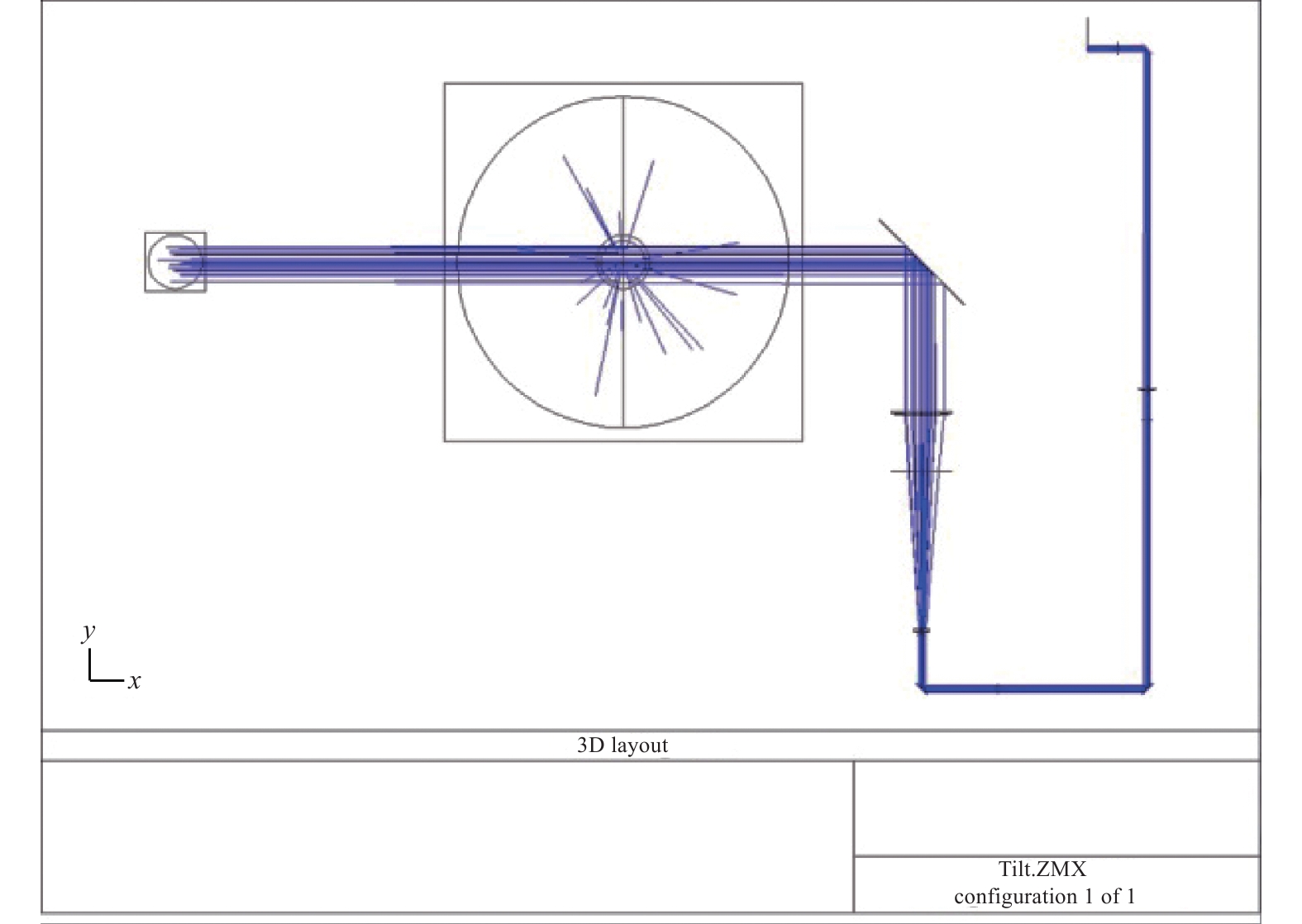
为分析上述方法对出射光束的影响,使用Zemax软件仿真了发射光路,模拟了利用摆镜偏转的激光出射情况,仿真结果如图5所示。

图 5 发射光路仿真图
Figure 5. Simulation diagram of transmitting optical path
使用的高斯光源波长532 nm,能量30 W,光斑直径22 mm,发散角0.5 mrad。
$$ {D}_{0}=D/{\rm cos}\alpha $$ (4) 光束直径D=22 mm,入射角45°时,反射镜直径
$ {D}_{0} $ =31 mm。结合已有的反射镜情况以及偏摆台的负载能力,选用直径50 mm的反射镜。激光测距发射光路有两级扩束系统,光束由摆镜经过转镜到达一级扩束系统,扩束倍数为两面镜子的焦距之比,透镜焦距计算公式为:
$$ {f}=\dfrac{1}{(n-1)\left( {\dfrac{1}{{r}_{1}}-\dfrac{1}{{r}_{2}}} \right)} $$ (5) 式中:n为折射率;r为透镜的曲率半径[8],使用的两面透镜的焦距分别为882.135 mm和158.595 mm,因此,一级扩束倍数为5.56,二级扩束由望远镜主镜与副镜组成,该仿真光路中扩束倍数为7.5,总扩束倍数为5.56×7.5 = 41.7,由公式(1)可得,出射光束偏转角度是摆镜偏转角度的2/41.7倍,出射光束的直径为917.4 mm左右。
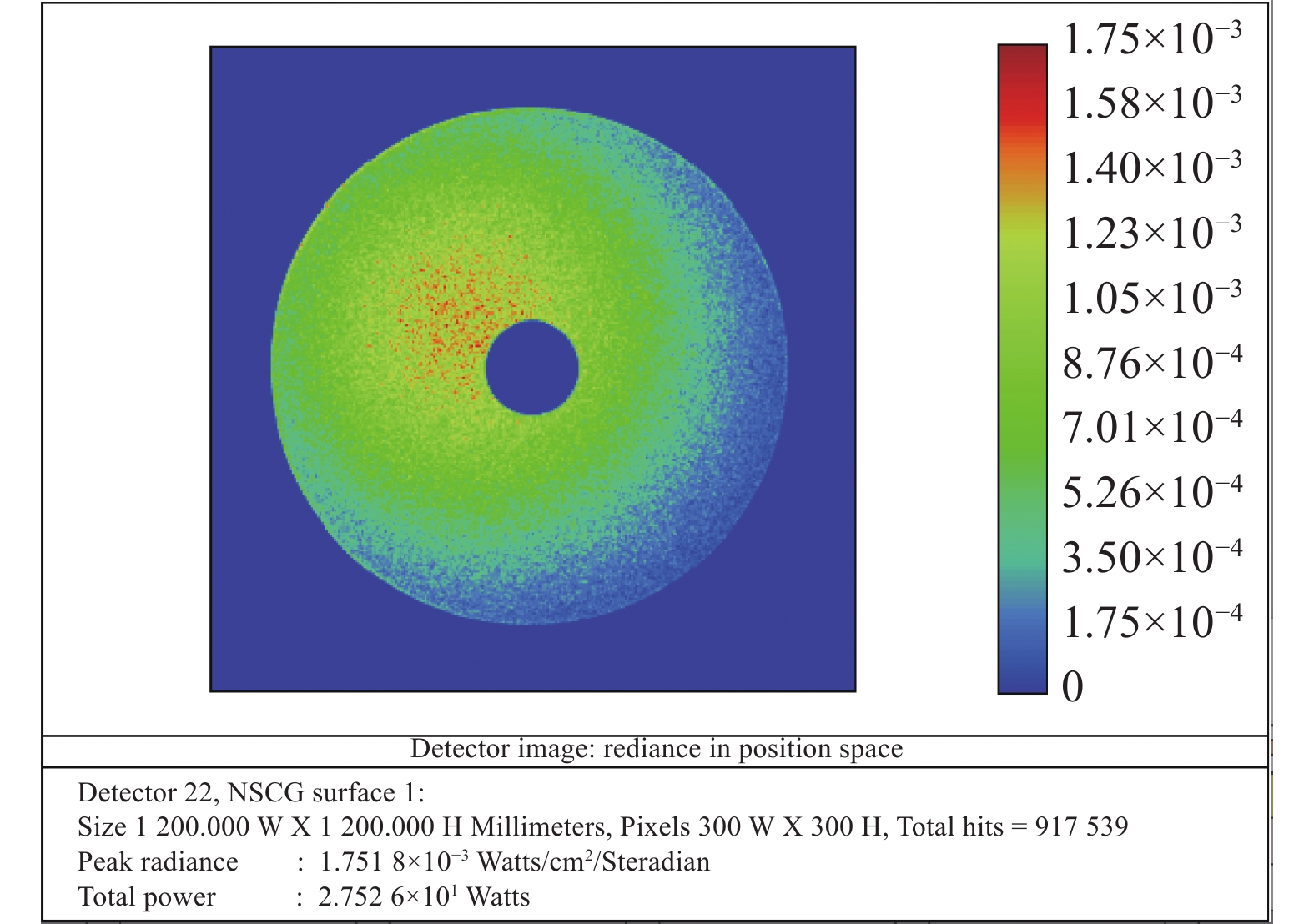
图6为放置在距离望远镜主镜2 m位置的探测器探测到的望远镜出射光束能量分布,此时摆镜工作在初始位置,两轴偏转角度都为0,功率为27.567 W。

图 6 望远镜出射光束能量分布仿真
Figure 6. Energy distribution simulation of telescope's outgoing beam
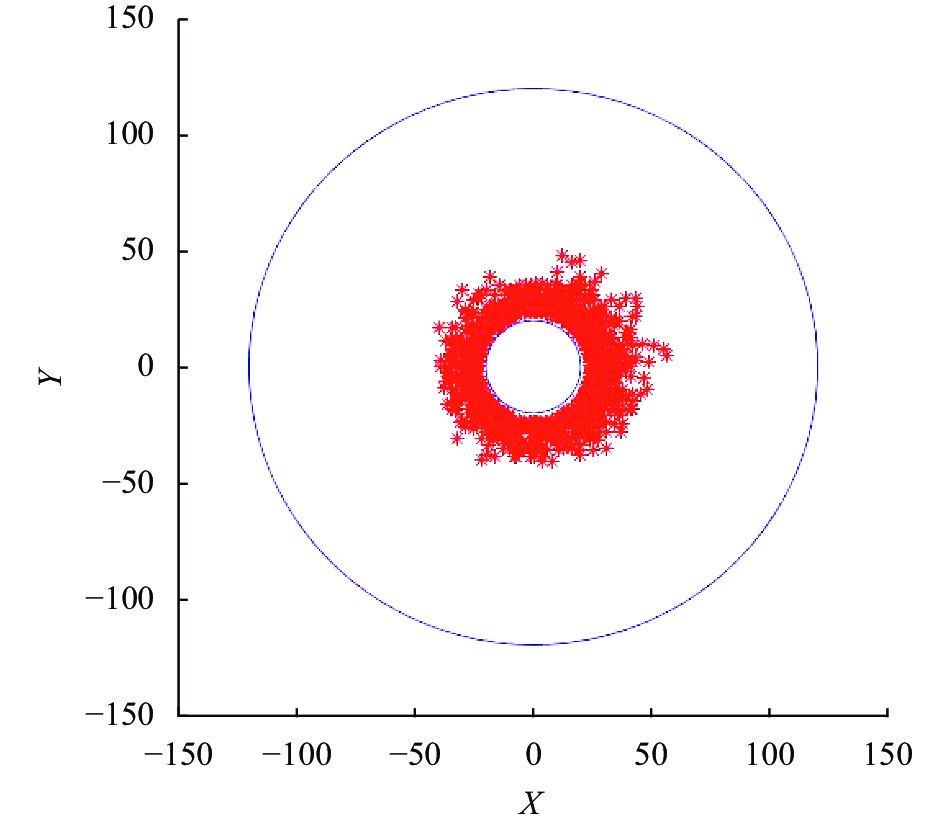
图7为摆镜两轴分别偏转63″后,探测到的望远镜出射光束能量分布。此时,发射光束偏离望远镜光轴3″,已有部分光束偏出望远镜发射视场,功率27.552 W,是摆镜工作在初始位置时激光功率的99%。

图 7 摆镜偏转后的望远镜出射光束能量分布仿真
Figure 7. Energy distribution simulation of telescope's outgoing beam with tip/tilt mirror deflection
-
图8、图9和图10是直线扫描、环形扫描和逐行扫描等三种搜索方法的示意图。直线扫描是从视场中心到视场边缘沿直线扫描,步长0.4″,搜索范围0″~2″。环形扫描是沿以视场中心为原点,半径0.2″的圆顺时针扫描。图中的点代表整个扫描过程中望远镜出射光束能量最强的点,由每一步的出射光束能量分布叠加而成[9]。环形扫描可以扩大扫描视场,适合没有回波信号的情况下使用,直线扫描可以在小范围进行扫描,找到回波较强的指向位置。逐行扫描的整个过程如下:首先控制X
轴在当前位置不动,Y轴以固定步长匀速偏转一定角度,到达设定边界值后停止偏转回到起点,X轴以相同步长偏转一步后停止,Y轴继续下一行的扫描,重复以上步骤直到X轴偏转角度到达设定边界值后停止扫描。 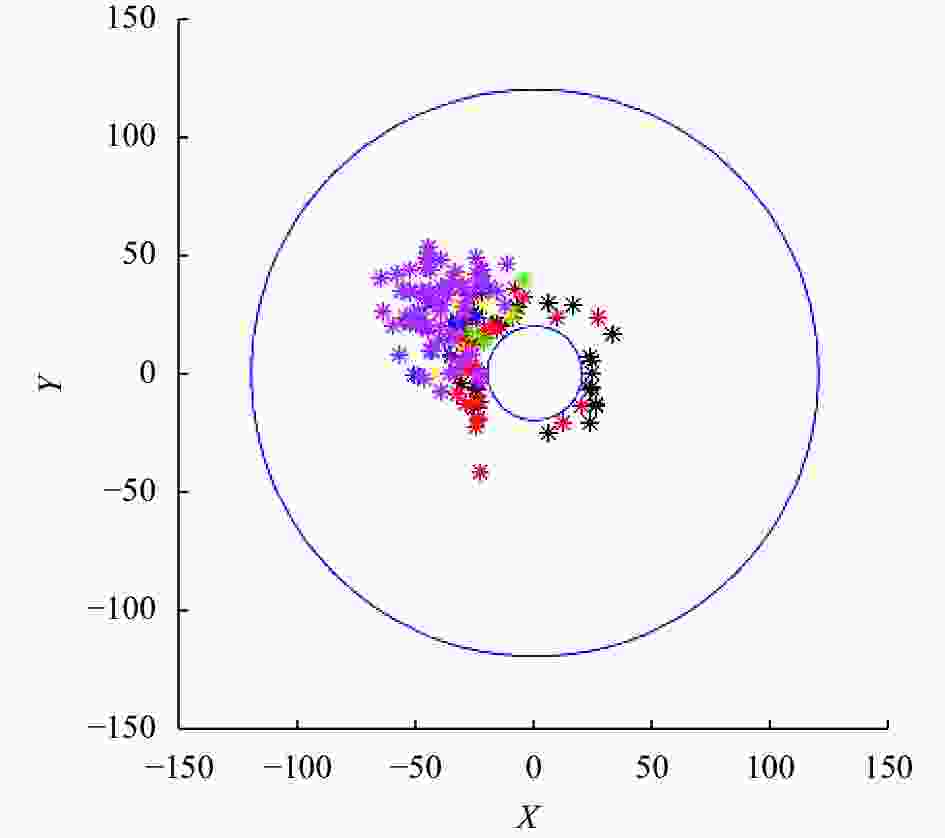
图 8 直线扫描
Figure 8. Linear scanning

图 9 环形扫描
Figure 9. Circular scanning

图 10 逐行扫描
Figure 10. Raw scanning
角反射器阵列与光斑中心的距离服从高斯分布,反射器在
$({x},{y})$ 位置处的概率${P} ({x},{y})$ 可以用公式(6)表示[10]:$$ {P}({x},{y})=\frac{1}{2\pi {\sigma }_{1}{\sigma }_{2}}{\rm exp}\left\{-\frac{1}{2}\times \left[\frac{{x}^{2}}{{\sigma }_{1}^{2}}+\frac{{y}^{2}}{{\sigma }_{2}^{2}}\right]\right\} $$ (6) 其中,以光斑位置为中心原点,
$ {\sigma }_{1}、{\sigma }_{2} $ 为标准差。单步搜索到目标的概率值为:
$${P}=\oiint {P}({x},{y})\mathrm{d}{x}\mathrm{d}{y} $$ (7) 积分区域:
$ {({x}-{{x}}_{n})}^{2}+{({y}-{{y}}_{{n}})}^{2}\leqslant {{R}}^{2} $ 。在一定扫描范围内,扫描步长越小,搜索到强回波位置的概率越高。根据光路仿真和搜索方法模拟结果,可得出加摆镜扫描系统后的1.2 m望远镜激光测距系统的目标跟踪策略。即目标激光测距跟踪时,首先使用望远镜进行跟瞄,“对准”后开始进行激光测距。若有回波信号,但回波信号较弱,则使用摆镜扫描系统在较小范围内进行激光束方向控制以找到回波较强的指向,此时适合采用逐行扫描方式和直线扫描方式;若无回波信号,则使用摆镜扫描系统在较大范围内进行激光束方向控制以进一步搜索回波信号,此时适合采用直线扫描和环形扫描方式。
-
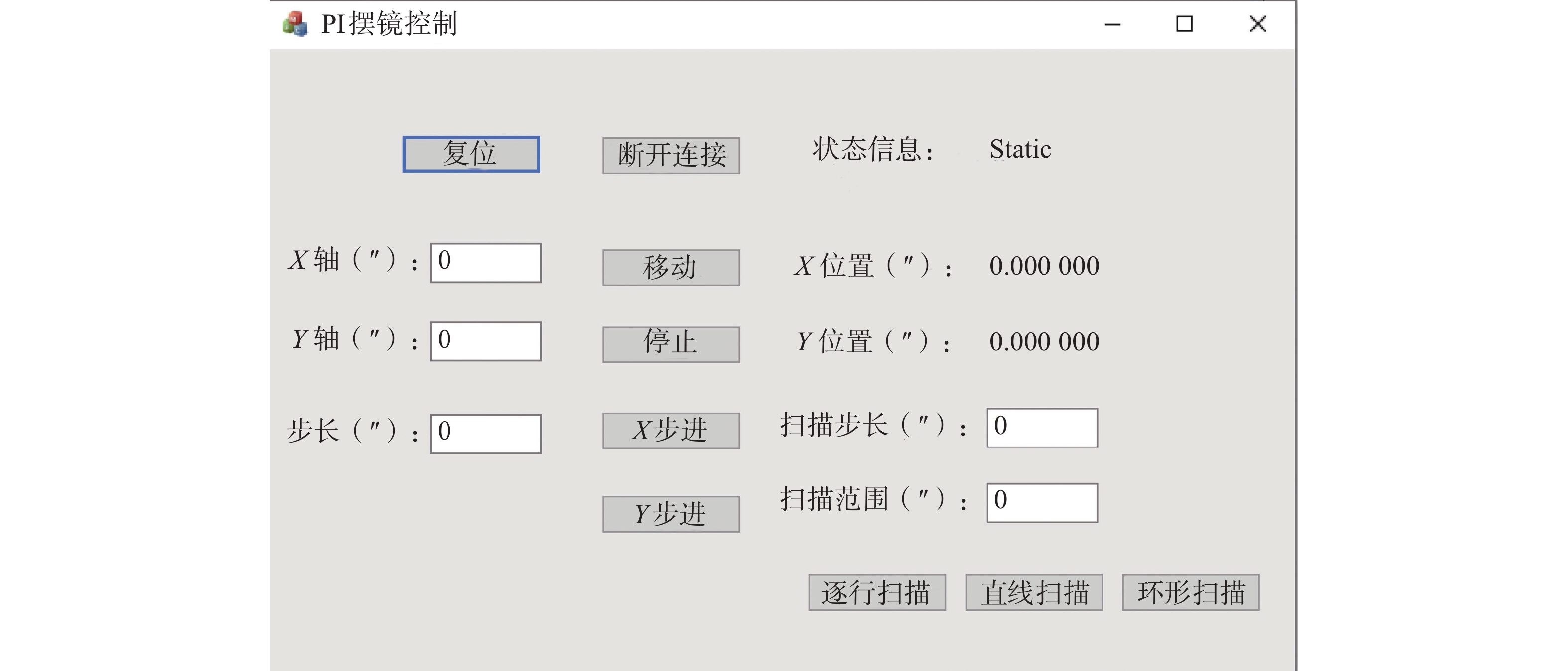
图11为试验中编写的摆镜控制软件,可以实现两轴定点移动、步进移动以及三种方式扫描。试验时,先把摆镜调到在光路中的初始位置,接收到的回波信号稳定后,设置扫描步长和扫描范围,分别用三种方式进行扫描,一次扫描结束后复位进行下一组扫描。

图 11 摆镜控制软件
Figure 11. Tip/tilt control software
试验中,测量Beacon-C和Lageos等低轨卫星和中轨卫星时,回波数变化较大,原因是卫星速度较快、跟踪误差变化较大,故无法确定回波数变化是由摆镜扫描引起还是望远镜跟踪抖动导致。
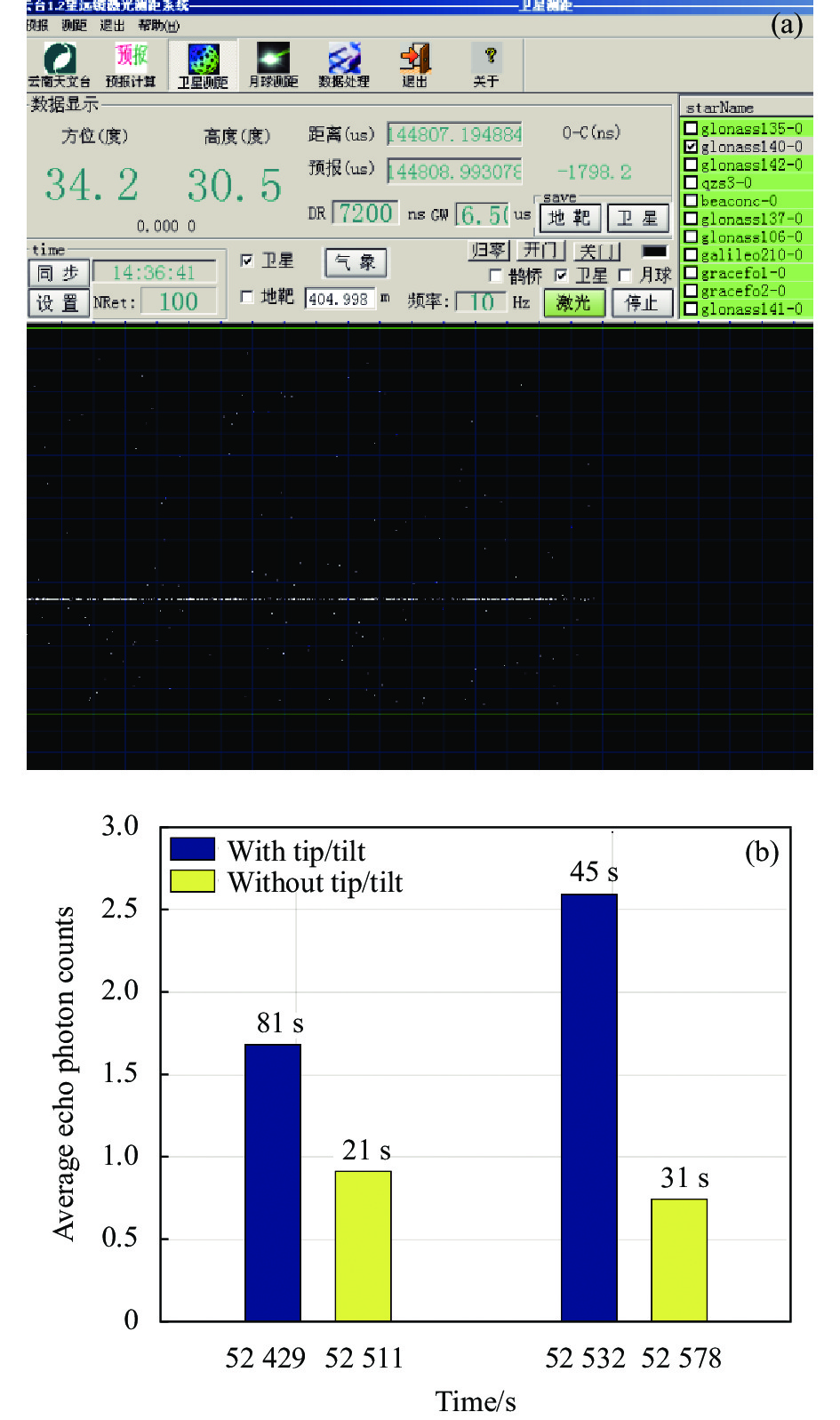
Qzs3为地球同步轨道卫星,轨道高度36000 km,图12是该卫星试验时的测距软件界面截图。图(b)是观测过程中使用摆镜搜索和不使用摆镜搜索时的每秒回波数均值对比,蓝色柱体是不使用摆镜搜索时的回波,黄色柱体是使用摆镜扫描时的回波。三段扫描分别是逐行扫描、直线扫描和环形扫描,


图 12 qzs3观测结果
Figure 12. qzs3 observation results
每次扫描结束后摆镜复位,回到扫描前的位置,三段扫描都是以0.5″为步长,2″为最大扫描范围。从图中可以看出,在望远镜跟踪稳定后,使用摆镜控制光束偏离当前指向时,回波数均值会发生变化,摆镜可以通过控制光束的偏转来影响回波数。
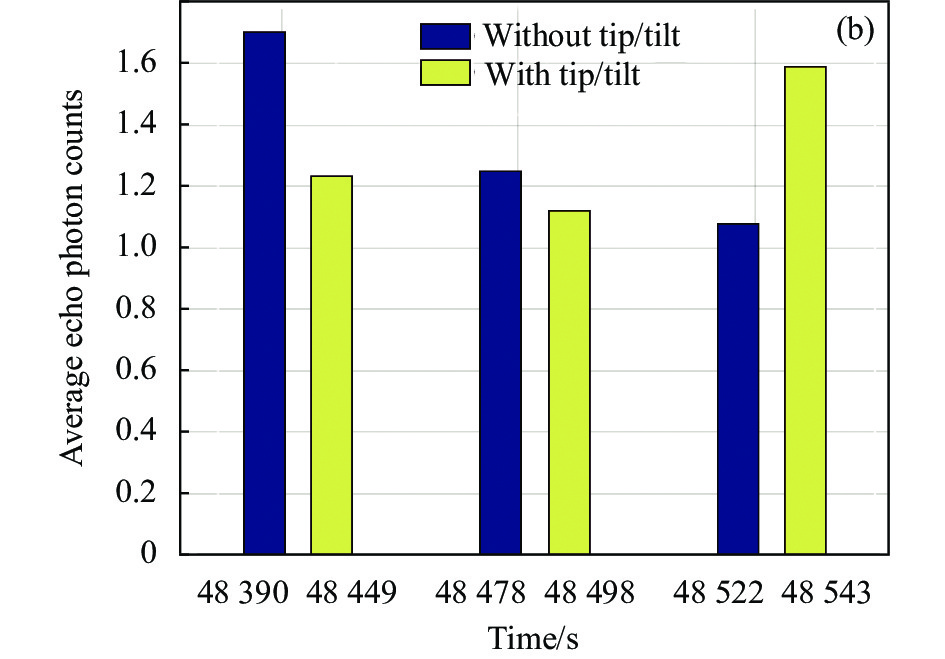
Glonass140为高轨卫星,轨道高度19140 km,图13是该卫星试验时的观测软件截图与截取的一段回波数据。图(b)中,黄色柱体是不使用摆镜搜索时的回波,蓝色柱体是使用摆镜扫描时的回波,摆镜扫描步长0.25″,最大扫描范围2″。
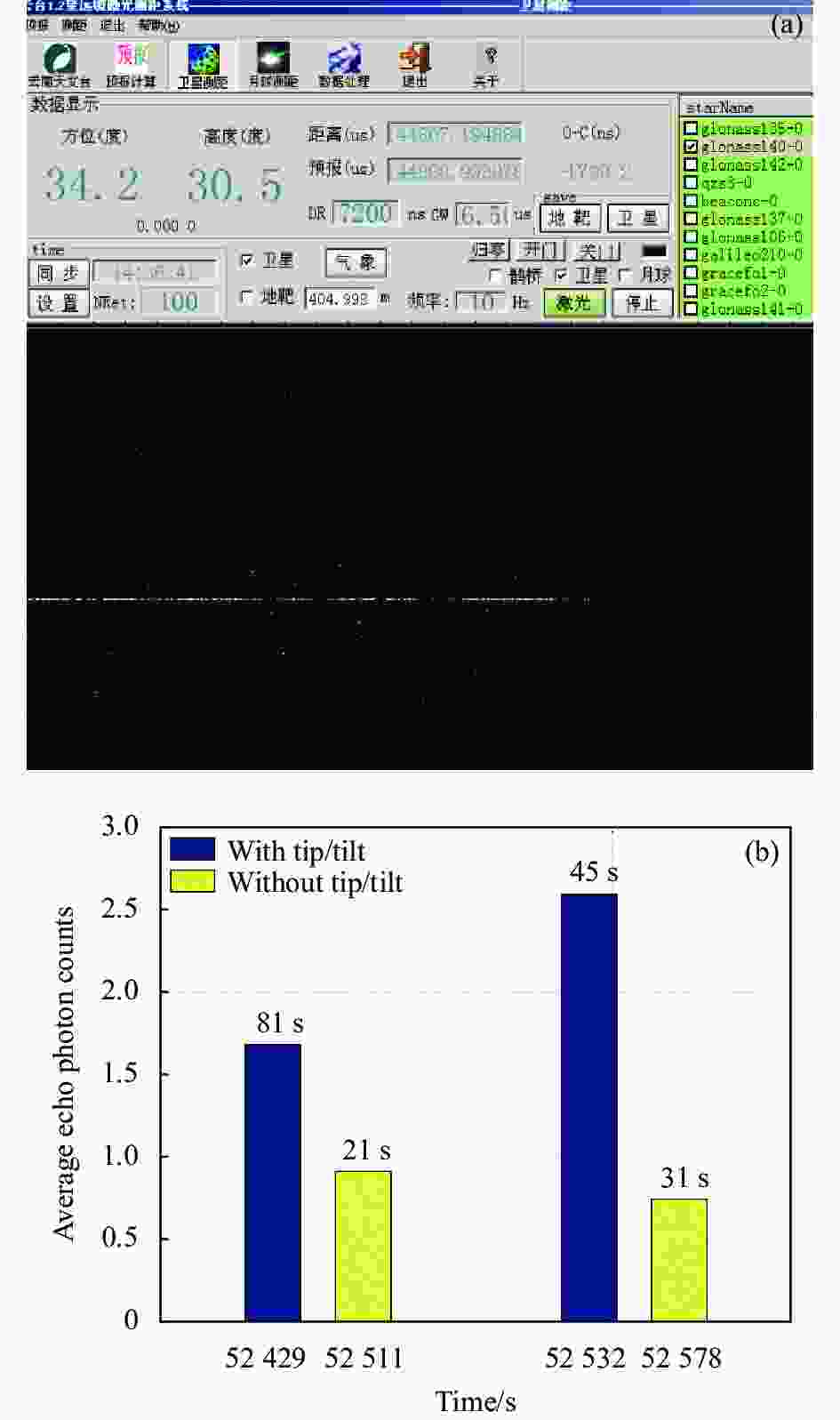
图 13 glonass140观测结果
Figure 13. glonass140 observation results
观测试验中,在扫描过程的后半段,回波数明显变多,扫描结束摆镜复位后回波数变少,再控制摆镜偏转到搜索过程中回波数较多的位置,接收到回波又明显变多。
随后又控制摆镜复位后再回到当前位置得到后两段数据,摆镜位置在搜索过程中的回波较强点时,回波数均值大约是在复位位置时的2.57倍。从回波数变化可以看出,在望远镜搜索到回波后,使用摆镜搜索可以找到回波更强的位置。
试验中还观测了glonass107、glonass 128、glonass 131、glonass143等多颗卫星,结果表明,在激光测距中,摆镜可以通过控制发射光束的偏转角度来影响回波数,能在激光测距中进行小范围快速高精度的搜索,找到回波较强的位置,实际测量结果与系统模拟结果相符,可应用于1.2 m激光测距系统实际观测中。跟踪低轨道空间目标时,若望远镜可进行目标图像闭环跟踪,则摆镜扫描系统也将起到如同跟踪高轨道卫星的效果。在跟踪月球或深空目标时,目标在现有图像采集系统中很难“看见”,导致望远镜是否“对准”目标较难判断,此时先采用望远镜对目标进行大步长(1″~2″)修正,然后每修正一步就使用摆镜扫描系统以此为中心进行小步长(0.1″)环形扫描修正,重复上述过程直至收到回波信号。
-
文中设计了一个基于摆镜的激光测距光束指向快速高精度控制系统,将摆镜应用到激光测距发射光路中,精确控制激光光束的出射方向,配合望远镜跟踪系统进行高分辨率高精度快速搜索来提高激光测距回波率。首先,基于云南天文台1.2 m月球激光测距望远镜光路系统进行了仿真分析,测试了摆镜的分辨率,并提出了基于摆镜的三种搜索方法。然后,将摆镜植入云南天文台1.2 m望远镜发射光路中,并开展了卫星观测试验。结果表明,系统具备对光束指向的快速高精度控制能力。对比近地卫星、20 000 km导航卫星和36000 km 地球同步卫星控制效果,距离越远、望远镜跟踪越平稳,搜索效果也越有效,因此,该方法可应用于月球以及深空目标激光测距研究中。目前云南天文台1.2 m望远镜正在进行高重频高性能月球激光测距系统升级,完成后便可将摆镜扫描系统应用于月球激光测距。对于近地卫星以及空间碎片等目标,实现望远镜平稳跟踪后该方法也将有效。同时,该方法对地月或深空激光通信等领域也有一定的参考价值。
Study on improving laser ranging success probability based on tip/tilt mirror technology
-
摘要: 深空激光测距受距离遥远、大气损耗等因素影响,地面站接收到的回波光子数非常稀少,因此,研究增加回波光子数的方法对提高系统测距成功概率具有重要的意义。文中在云南天文台1.2 m望远镜激光测距系统发射光路中增加摆镜,通过快速高精度控制激光光束传播方向的方法搜索回波光子数较多的指向位置。首先设计了摆镜扫描系统,然后对系统进行仿真分析,模拟系统出射光束偏转角度和能量分布随摆镜偏转角度的变化情况以及利用摆镜进行搜索的效果,最后对测距卫星进行实际观测试验。测量得到系统使用的二维摆镜的最小分辨率为0.2″,经激光发射系统扩束后,可以实现最小0.005″的搜索步长,控制频率在100 Hz以上。实际观测结果表明,使用摆镜提高回波率的方法是有效的,并且目标轨道高度越高效果越明显,因此可应用于深空目标激光测距系统。Abstract: The number of echo photons in deep space laser ranging is rare because of the long distance, so it is of great significance to study the method of increasing the number of echo photons to improve the success probability of ranging. In this paper, a tip/tilt mirror is added to the transmitting optical path of the laser ranging system of the 1.2 m Telescope of Yunnan Observatory, and the pointing position with a large number of echo photons is searched by quickly and accurately controlling the propagation direction of the laser beam. First, the tip/tilt mirror scanning system is designed, and then the system is simulated and analyzed to simulate the variation of the deflection angle and energy distribution of the outgoing beam with the deflection angle of the tip/tilt mirror and the search effect by using the tip/tilt mirror. Finally, the actual observation experiment is carried out on the ranging satellite. The actual measurement shows that the minimum resolution of the two-dimensional tip/tilt mirror used by the system is 0.2″. After beam expansion by the laser emission system, the minimum search step of 0.005″ can be realized, and the control frequency can reach more than 100 Hz. The actual observation results show that the method of using a tip/tilt mirror to improve the echo rate is effective, and the higher the target orbit height is, the more obvious the effect. Therefore, it can be applied to a deep space target laser ranging system.
-
Key words:
- lasering ranging /
- tip/tilt mirror /
- transmitting optical path /
- target search
-
图 6 望远镜出射光束能量分布仿真
Figure 6. Energy distribution simulation of telescope's outgoing beam
图 7 摆镜偏转后的望远镜出射光束能量分布仿真
Figure 7. Energy distribution simulation of telescope's outgoing beam with tip/tilt mirror deflection
表 1 偏摆台参数
Table 1. Tip/tilt platform parameter
Actuator Piezoelectric Tilt angle/mrad 5 Full-range repeatability/μrad 0.5 Resonant frequency/Hz 3.3±20%  下载: 导出CSV
下载: 导出CSV
-
[1] 吴伟仁, 李海涛. 中国深空探测网现状与展望[J]. 中国科学: 信息科学, 2020, 50(1): 87-108. doi: 10.1360/SSI-2019-0242 Wu Weiren, Li Haitao, Li Zan, et al. Status and prospect of China's deep space TT&C network [J]. Scientia Sinica Informationis, 2020, 50(1): 87-108. (in Chinese) doi: 10.1360/SSI-2019-0242 [2] 叶叔华, 黄 珹. 天文地球动力学[M]. 济南: 山东科学技术出版社, 2000: 101-104. Ye Shuhua, Huang Cheng. Astrogeodynamics[M]. Jinan: Shandong Science and Technology Press, 2000: 101-104. (in Chinese) [3] Turyshev S G, Williams J G, Folkner W M, et al. Corner-cube retro-reflector instrument for advanced lunar laser ranging [J]. Experimental Astronomy, 2013, 36(1/2): 105-135. doi: 10.1007/s10686-012-9324-z [4] 李语强, 伏红林, 李荣旺, 等. 云南天文台月球激光测距研究与实验[J]. 中国激光, 2019, 46(1): 0104004. doi: 10.3788/CJL201946.0104004 Li Yuqiang, Fu Honglin, Li Rongwang, et al. Research and experiment of lunar laser ranging in yunnan observatories [J]. Chinese Journal of Lasers, 2019, 46(1): 0104004. (in Chinese) doi: 10.3788/CJL201946.0104004 [5] Otsubo T, Kunimori H, Noda H, et al. Simulation of optical response of retroreflectors for future lunar laser ranging [J]. Advances in Space Research, 2010, 45(6): 733-740. doi: 10.1016/j.asr.2009.12.003 [6] 倪迎雪. 空间激光通信 APT 系统中快速反射镜关键技术研究[D]. 中国科学院大学. 2018 Ni Yingxue. The study of fast steering mirror in the acquisition, pointing and tracking system of the space laser com-munication[D]. Beijing: Chinese Academy of Sciences, 2018. (in Chinese) [7] 丁永超, 王德恩, 等. 利用倾斜镜技术实现2.4 m 望远镜的高精度跟踪I: 原理样机设计及测试[J]. 激光与光电子学进展, 2018, 55(7): 071104. doi: 10.3788/LOP55.071104 Ding Yongchao, Wang Deen, Lun Baoli, et al. Realization of high tracking precision using tip-tilt mirror for the 2.4-meter telescope-Part Ⅰ: prototype design and test [J]. Laser & Optoelectronics Progress, 2018, 55(7): 071104. (in Chinese) doi: 10.3788/LOP55.071104 [8] 于陶然, 王超, 等. 基于ZEMAX的二维变焦扩束光学系统设计[J]. 激光与红外, 2016(46), 747-751. doi: 10.3969/j.issn.1001-5078.2016.06.020 Yu Taoran, Wang Chao, Tang Xiaojun, et al. Design of two-dimensional zoom beam expander optical system based on ZEMAX [J]. Laser & Infrared, 2016, 46(6): 747-751. (in Chinese) doi: 10.3969/j.issn.1001-5078.2016.06.020 [9] 孙崇尚. 基于快速反射镜的高精度、宽频带扫描像移补偿技术研究[D]. 中国科学院大学. 2016 Sun Chongshang. Research on the scanning image motion compensation technology based on fast steering mirrors with high precision and wide frequency range[D]. Beijing: Chinese Academy of Sciences, 2016. (in Chinese) [10] 汤儒峰, 李语强, 李荣旺. GEO 暗弱空间碎片目标搜索策略分析[J]. 天文研究与技术, 2017, 14(3): 304-309. Tang Rufeng, Li Yuqiang, Li Rongwang. The strategic analysis for searching faint space debris in the GEO region [J]. Astronomical Research and Technology, 2017, 14(3): 304-309. (in Chinese) -

 点击查看大图
点击查看大图

图(14) / 表(1)
计量
- 文章访问数: 160
- HTML全文浏览量: 42
- PDF下载量: 40
- 被引次数: 0














