







-
高精度的空间碎片观测数据是航天器规避空间碎片的保障,激光测距技术是目前空间目标距离测量中精度最高的一种技术,因此空间碎片激光测距对于空间碎片监测具有重要意义。空间碎片激光测距(Space Debris Laser Ranging, DLR)与卫星激光测距(Satellite Laser Ranging, SLR)的原理基本相同,均是通过测量激光脉冲在地面站与空间目标间的飞行时间获得空间目标的距离的。
我国空间碎片激光测距技术起步较晚,但发展较快。中国科学院上海天文台于2008年7月成功实现了1 m左右大小低轨空间碎片的激光测距,测距精度达70~80 cm。中国科学院云南天文台从2008年1月起开始积极开展空间碎片激光测距研究,并于2010年6月成功探测到目标。中国科学院国家天文台 长春人造卫星观测站于2014年初开展了空间碎片探测试验,成功探测到目标[1-5]。
随着技术的发展,更多的新技术被应用在激光测距中。中国科学院云南天文台于2015年开始利用多像素光子计数器(Multi-Pixel Photon Counter,MPPC)
;国际上也称硅光电倍增管(Silicon Photomultiplier,SiPM)来接收激光测距回波并开展激光测距试验[6]。2017年,中国科学院云南天文台成功将阵列超导纳米线单光子探测器(下面简称阵列超导探测器)和多通道事件计时器等阵列探测技术应用于空间碎片激光测距试验系统中。此前,只有美国APOLLO站曾将4×4 APD阵列用于月球激光测距技术中并取得较好的结果[7-8]。 中国科学院云南天文台基于阵列探测技术的激光测距系统成功测到最小目标为轨道高度约1 000 km、雷达截面(Radar Cross Section,RCS) 0.045 m2的空间碎片;成功测到最远目标为斜距约5 000 km、RCS 18.2505 m2的空间碎片。由此可见,阵列探测技术在激光测距中的应用极大提高了空间碎片的探测能力。以下分别介绍阵列超导纳米线单光子探测器、多通道事件计时器,以及基于阵列探测的激光测距试验系统和试验结果。
-
超导纳米线单光子探测器(Superconducting Nanowire Single-photon Detector, SNSPD)是一种用于高效、快速、准确地探测单光子的新型光探测器,具有暗计数低、探测速率高、检测频谱宽等优点,在众多领域存在潜在应用。
对于激光测距技术,暗计数低,可以提高探测器输出信噪比;探测效率高,探测器的响应速度快,恢复时间短,可以提高激光回波探测成功概率;检测频谱宽,可以探测多个波长的激光,在文中系统中使用的激光器波长为1 064 nm,1 064 nm激光在大气传输特性、远场光束特性、远场光的单位能量光子数和激光器功率等方面都较传统卫星激光测距所使用的532 nm有优势;阵列探测使每个激光脉冲中被探测到的光子数增加,提高了回波探测成功概率。
-
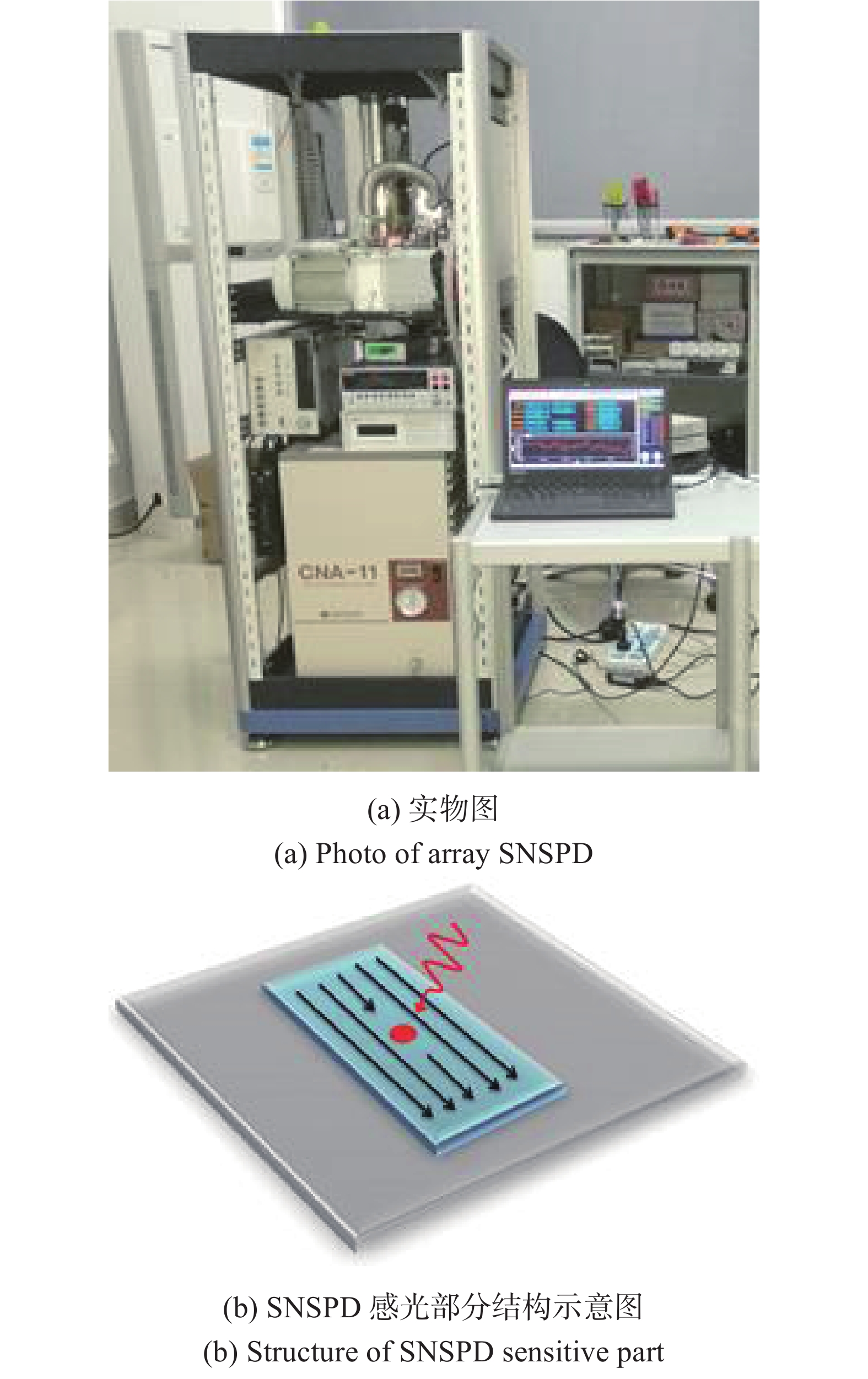
SNSPD由感光部分和外部自动控制系统组成(见图1(a))。SNSPD自动控制系统主要包含了核心控制模块、源表控制模块、直流电源控制模块等,通过控制系统内部设备的顺序启停,完成抽真空与降温等过程,构建SNSPD探测所需的真空与低温环境。

图 1 阵列超导探测器
Figure 1. Array SNSPD
SNSPD感光部分为使用超导薄膜材料制备成的纳米线蜿蜒结构(见图1(b)),探测器工作时被偏置在稍低于其超导临界电流的位置。当纳米线吸收光子后,吸收区域的超导态被破坏,产生热岛,热岛区域在电流焦耳热的协助下增长到一定范围,从而产生电脉冲信号。随后经过纳米线自身和衬底的冷却,热岛区域消失,纳米线恢复到初始状态,此时可进行下一次探测。探测器吸收光子的过程在电路上表现为快速上升,随后指数衰减的电脉冲,通过将此脉冲信号放大,就可以鉴别单光子的到达[9-10]。
阵列超导探测器的感光部分是由多条纳米线组成的纳米线阵列。
-
中国科学院云南天文台实际使用的阵列超导探测器如图1(a)所示,由南京大学自主研制,像元数为2×2和4×4。
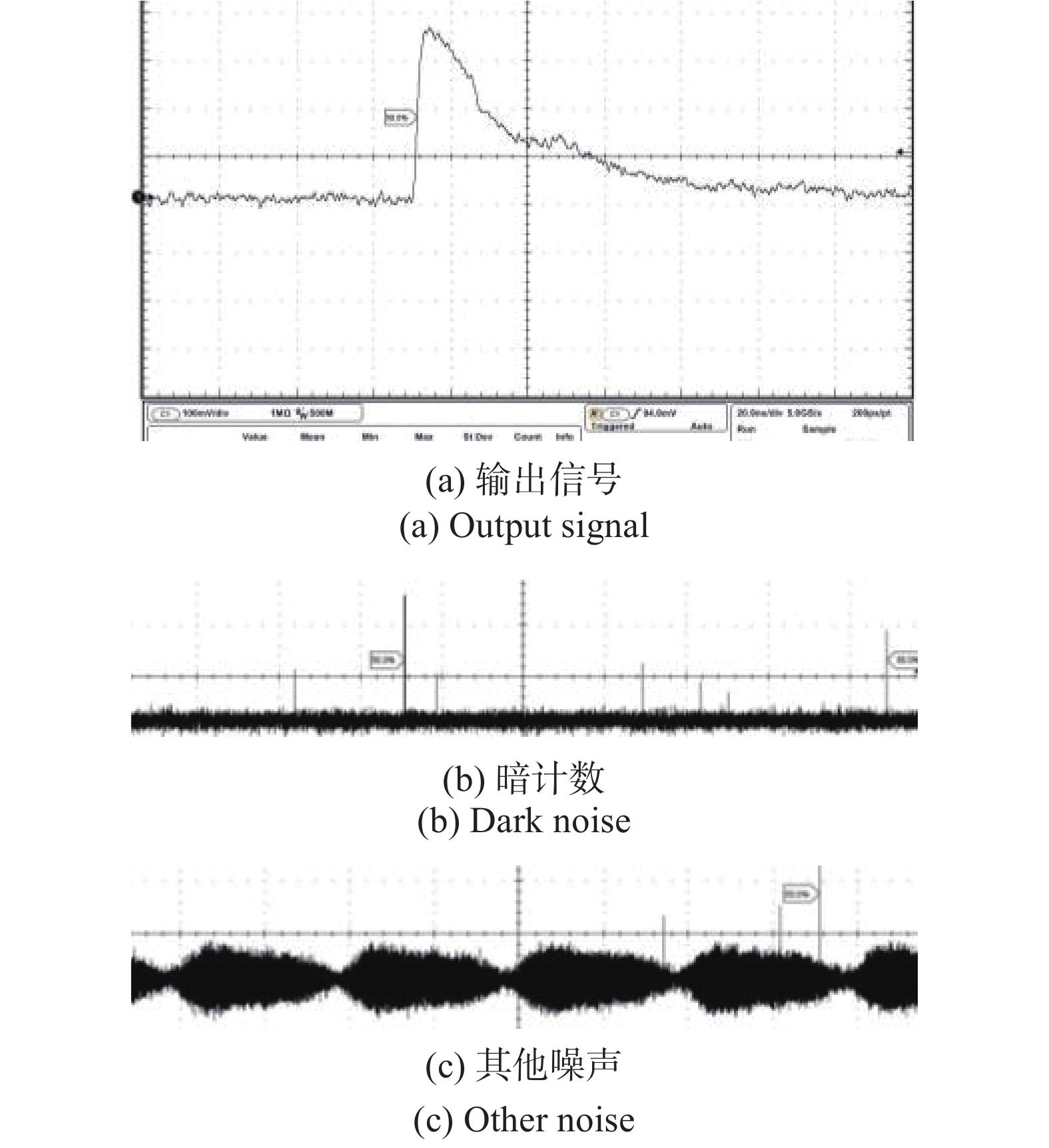
阵列超导探测器输出信号如图2(a)所示,探测器感光部分纳米线制备差异导致输出信号略有不同,目前中国科学院云南天文台使用的阵列超导探测器输出电压范围在50 ~180 mV之间,脉冲宽度范围在30~60 ns之间,上升时间约1 ns。阵列超导探测器输出噪声如图2(b)和图2(c)所示,包括暗计数和其他噪声,暗计数是在无输入条件下由器件自身产生的输出,会被当作信号记录;其他噪声来自于系统连接其他设备,幅值相对较低,一般情况下,不会被记录。

图 2 阵列超导探测器输出信号和输出噪声
Figure 2. Output signal and noise of array SNSPD
阵列超导探测器主要性能指标如表1所示。
表 1 阵列超导探测器主要性能指标
Table 1. Main performance specification of array SNSPD
Content Performance specification Response band 500-1 700 nm Detection efficiency ≥20%(@1 064 nm) Dark noise ≤10000 cps(@20%) Time jitter ≤400 ps Recovery time ≤100 ns Output assignment 50-180 mV Working mode Free -
在kHz激光测距中,数据采集通常采用事件计时器[11]。事件计时器将激光发射脉冲和回波脉冲视为事件并记录脉冲前沿到达的精确时刻,即主波时刻和回波时刻,二者之差即为激光脉冲飞行时间。云南天文台1.2 m望远镜kHz激光测距系统[12]采用A033-ET,该仪器有测量精度高、时间抖动小等优点,但其只有2路采集通道。为了满足多路激光测距数据采集需求,需要多通道激光测距数据采集仪器。
多通道事件计时器基于Guidetech公司GT8000多通道平台进行开发,首先对GT8000物理接口重定义,然后通过调用SDK进行软件设计,并部署在PXIe控制器上,实现4×4和2×2的多路数据采集和数据自动处理。
-
GT8000多通道平台由1个NI PXIe-8840控制器、1个NI PXIe-1805机箱、NI PXIe驱动软件、多个GT668PXIe-1模块、GT668驱动软件组成,按用户需求可以支持2~34通道的输入输出,PXIe控制器内嵌操作系统,用户可根据需要选择操作系统并开发软件实现测量需求。中国科学院云南天文台实际使用的GT8000多通道平台如图3(a)所示,共使用10个GT668PXIe-1模块,每个模块有2个输入通道,合计20个输入通道。
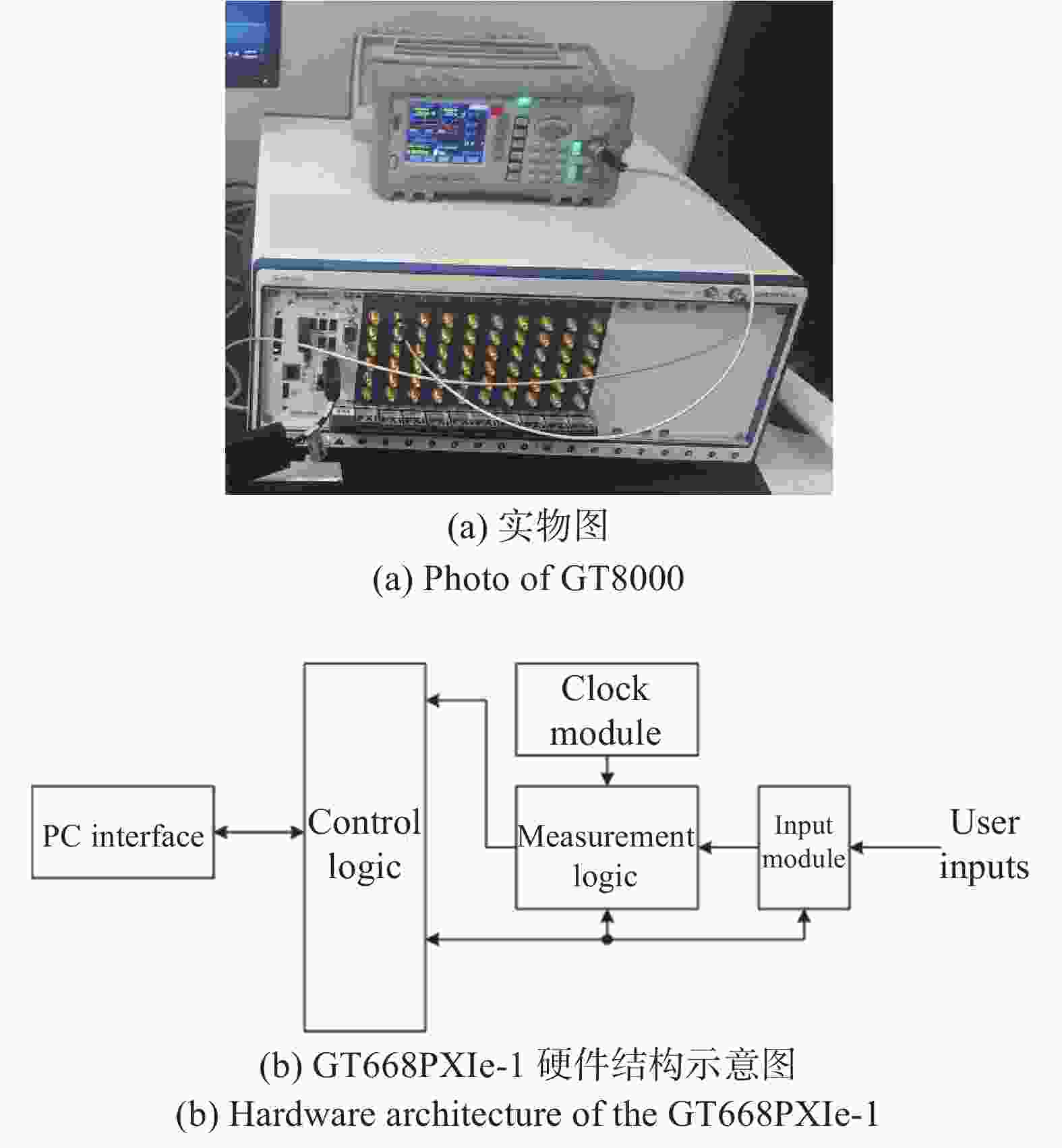
图 3 GT8000多通道平台
Figure 3. GT8000 multi-channel system
GT668PXIe-1结构如图3(b)所示,测量逻辑模块与时钟模块保持同步,输入的信号在进入输入模块进行预处理后送入到测量逻辑模块进行时间间隔的测量,控制逻辑模块对上述模块进行控制,并将测量输出处理后送入至PC端接口(PXIe控制器)[13]。
GT668PXIe-1主要性能指标如表2所示。
表 2 GT668PXIe-1模块主要性能指标
Table 2. Main performance specification of GT668PXIe-1 module
Content Performance specification Main input channels 2,SMA External clock channel 1,SMA External arm channel 1,SMA Output channels 2,SMA Time resolution 0.9 ps Frequency resolution 10-12 digits/second Max measurement rate 4 million/second per channel Main input channels frequency range 2 700 MHz -
多通道激光测距数据采集软件界面如图4所示。软件界面主要用于调试系统、参数设置等,系统状态和实时测量数据通过网络传给外部软件进行显示,测量数据和标准点数据保存在网络磁盘或本地磁盘。软件功能包括:GT668采集模块初始化及自校准、系统时间同步、多路数据采集、多路数据实时处理、数据自动处理(基于泊松滤波[14-15]、循环拟合滤波等)、标准点生成、数据存储、数据通讯等。

图 4 多通道激光测距数据采集软件
Figure 4. Software of multi-channel laser ranging data acquisition
-
阵列超导探测器工作在无门控的自由工作模式,大量背景噪声远高于激光发射重频数,最高峰值约2 MHz/通道(信号<100 Hz/通道),给数据采集和实时处理带来困难,且数据存储也需要消耗更多时间;基于阵列超导探测器的激光测距数据中,大量存在同一采集通道多个回波B事件对应同一个主波A事件的情况;有多个数据通道,计算量增加。
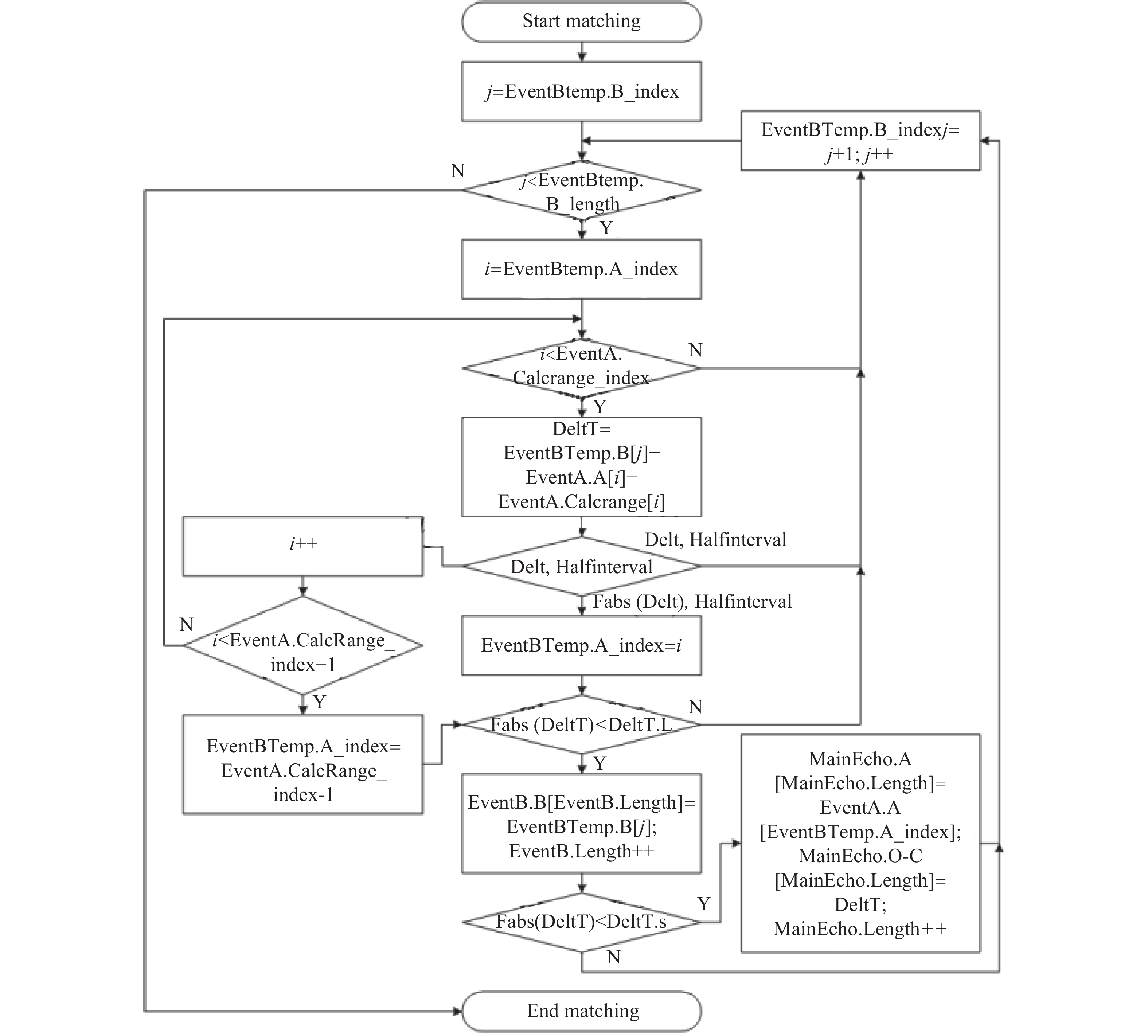
针对以上问题,多通道激光测距数据主回波匹配方法在常规主回波匹配方法[16-17]上进行改进:(1)通过观测残差
$\Delta T$ 与半主波间隔$\Delta \tau /2$ 进行比较,进行A事件索引值的快速搜索,将A事件索引值搜索与A、B事件匹配计算分开;(2)使用两个阈值$\Delta {t_\rm s}$ 和$\Delta {t_\rm l}$ 实现软件距离门功能,较小阈值$\Delta {t_\rm s}$ 内的数据用于显示残差(O-C);较大阈值$\Delta {t_\rm l}$ 内的数据作为原始数据保存,此范围内包含的更多噪声用于后处理中泊松滤波的噪声统计,较大阈值$\Delta {t_l}$ 外的数据作为无用噪声不再保存。数据实时处理流程如图5所示,图中EventBTemp为采集到的回波数据,EventA、EventB为需要保存的主波和回波数据。
图 5 实时数据处理流程
Figure 5. Real-time data processing flow
经过以上优化,提高了多通道激光测距数据采集软件实时处理速度和数据存储速度。
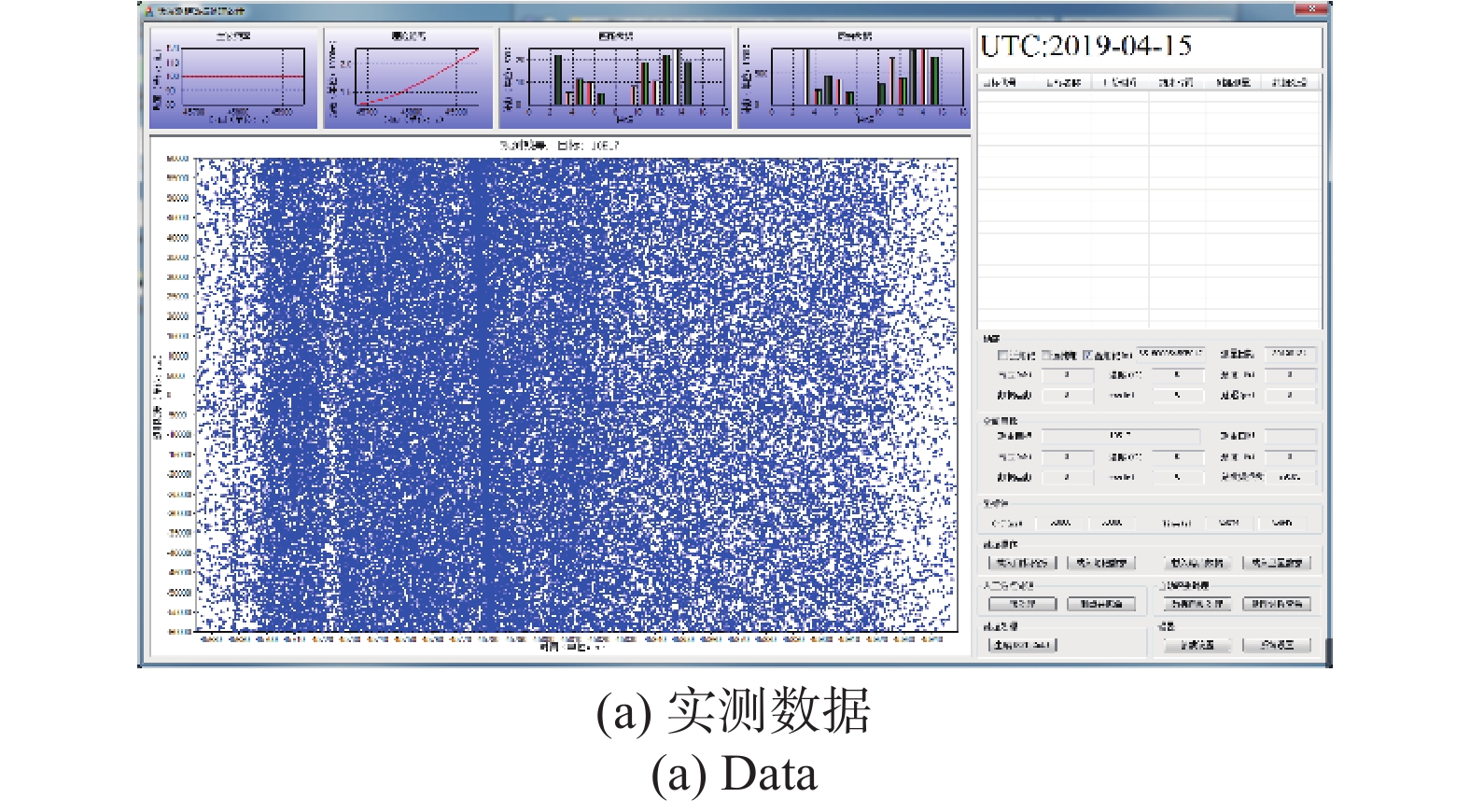
多通道激光测距数据采集软件还具备数据事后自动处理功能,图6为多通道激光测距数据处理软件,主要用于调试和查看数据自动处理过程;图6(a)为2019年4月15日4×4阵列探测器所测得空间碎片10 517实测数据,图6(b)为数据自动处理结果,内符合精度1.53 m (激光脉宽5.7 ns)。

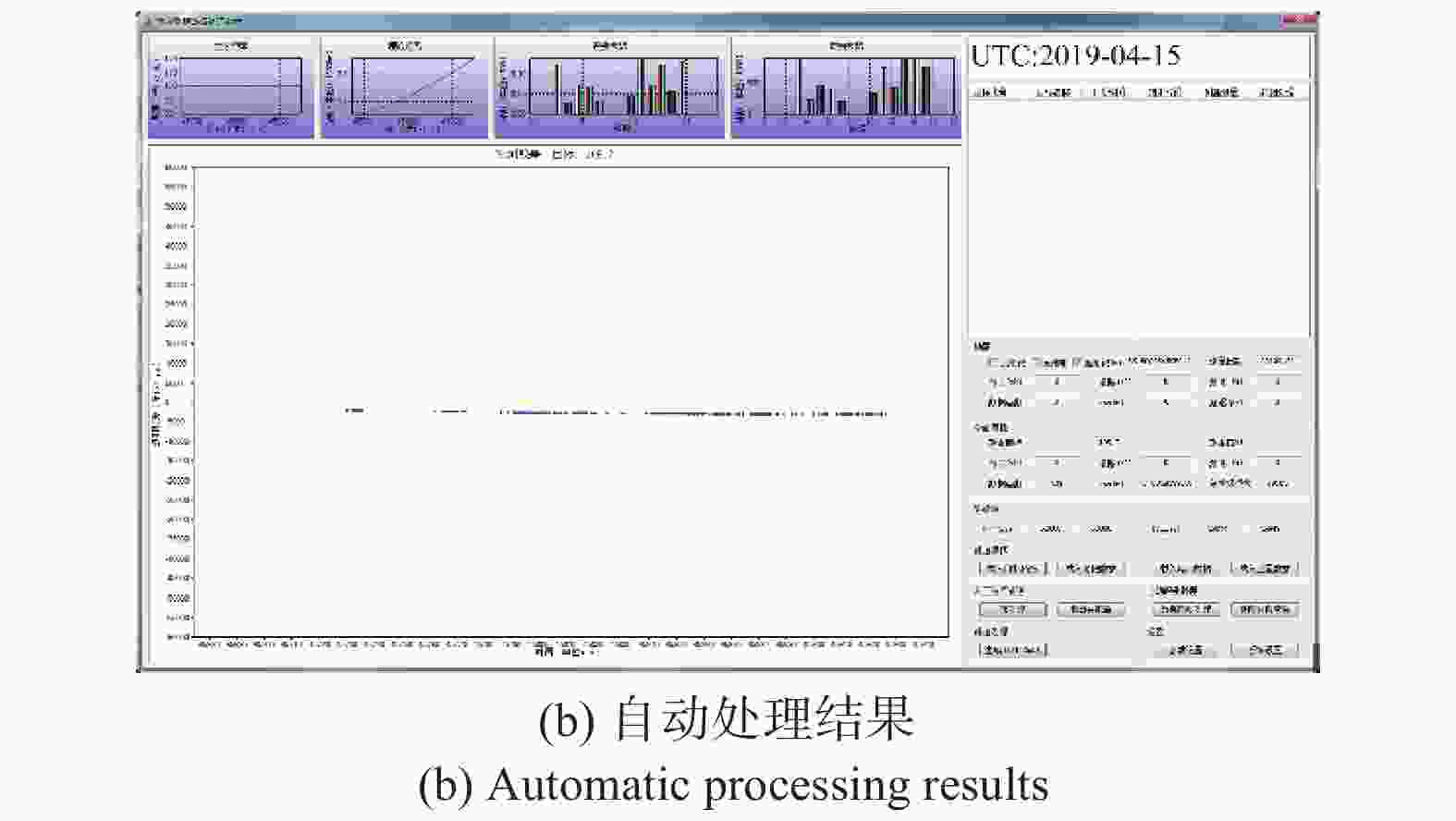
图 6 实测数据和数据处理
Figure 6. Measured data and data processing
-
多通道事件计时器的性能主要取决于GT668的性能,最大工作频率受数据采集软件实时处理速度影响,性能低于单个GT668性能(约为180 kHz/channel ×18channel)。由表2可以看出,GT668时间分辨率为0.9 ps,采集通道输入信号频率范围可达2 700 MHz(死时间约为1/2 700 MHz),相较于之前使用的A033-ET,在性能上也有所提升。表3为GT668与A033-ET的主要性能对比[13]。
表 3 多通道事件计时器与A033-ET的性能对比
Table 3. Performance comparison of multi-channel ET and A033-ET
Instrument Multi-channel ET A033-ET Time resolution 0.9 ps <5 ps Dead time ~1/2 700 MHz 50 ns Max measurement rate ~180 kHz/channel×18channel @software,
4 MHz/channel×20channel @hardware12 kHz 2016年1~2月,将单块GT668模块应用在中国科学院云南天文台常规激光测距中,数据内符合精度与A033-ET数据内符合精度一致[13],结果如表4所示,地靶数据内符合精度约0.5 cm,LAGEOS卫星数据内符合精度<1.5 cm,其他卫星数据内符合精度<2 cm。
表 4 GT668模块与A033-ET内符合精度对比(中国科学院云南天文台常规卫星激光测距系统)
Table 4. RMS of GT668 and A033-ET (conventional SLR system of Yunnan Observatories, CAS)
Target GT668 A033-ET Ground target/cm ~0.5 ~0.6 LAGEOS satellites/cm <1.5 <1.5 Other satellites/cm <2.0 <2.0 -
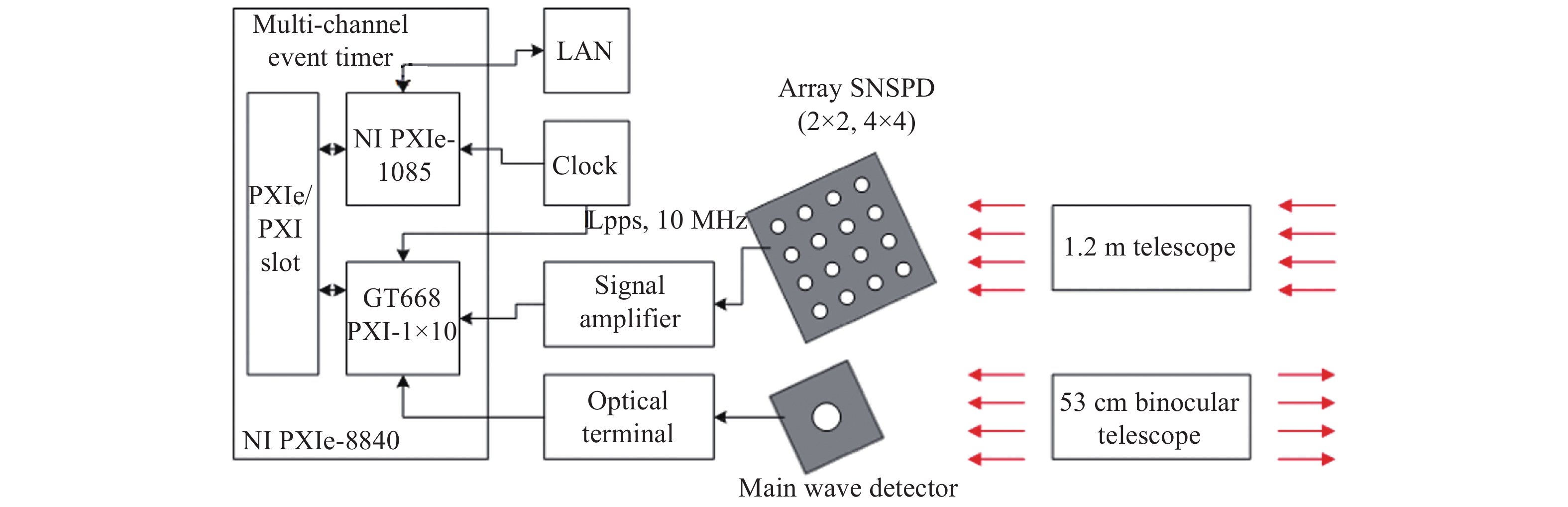
基于阵列探测技术的激光测距试验系统如图7所示,利用中国科学院云南天文台现有53 cm双筒望远镜及1.2 m望远镜,共同构建异地收/发测距平台。测距开始后,激光器发射激光脉冲并通过53 cm双筒望远镜发射光路指向空间目标,主波探测器探测激光发射主波信号,由光端机从激光发射望远镜传输至1.2 m望远镜,被多通道事件计时器响应并记录此主波信号时刻。激光脉冲被空间目标反射回地面测站的少部分光子信号通过1.2 m望远镜接收光路传输至阵列超导探测器。阵列超导探测器输出信号被多通道事件计时器响应并记录各通道回波信号时刻。试验系统中激光器波长为1 064.27 nm,发射频率为100 Hz,最大功率为300 W (功率可调),脉冲宽度为5.7 ns。

图 7 基于阵列探测的激光测距系统示意图
Figure 7. Diagram of laser ranging system based on array detection
-
试验主要选取小尺寸空间碎片作为测距目标,合作目标和大尺寸碎片作为测距目标时,主要用于系统验证。2017年3月10日~5月31日和2018年3月26日~5月13日期间,成功采集278圈空间碎片激光测距数据和84圈卫星激光测距数据。
试验中探测到的最小目标为轨道高度约1 000 km、RCS<0.05 m2的空间碎片(见表5),测距数据内符合精度<1.5 m (激光脉宽5.7 ns),激光能量为70 ~150 W。2017年5月26日首次测到空间碎片902测量结果如图8所示,目标RCS为0.045 m2。
表 5 探测到的最小目标(空间碎片)
Table 5. Min measuring target detected (space debris)
Code Apogee/km RCS/m2 Size/m RMS/m 900 1 009 0.049 Diameter 0.39 <1.5 902 1 078 0.045 Diameter 0.39 <1.5 1 520 1 179 0.048 Diameter 0.39 <1.5 
图 8 空间碎片(902)激光测距回波信号图
Figure 8. Echo signal of space debris (902) laser ranging
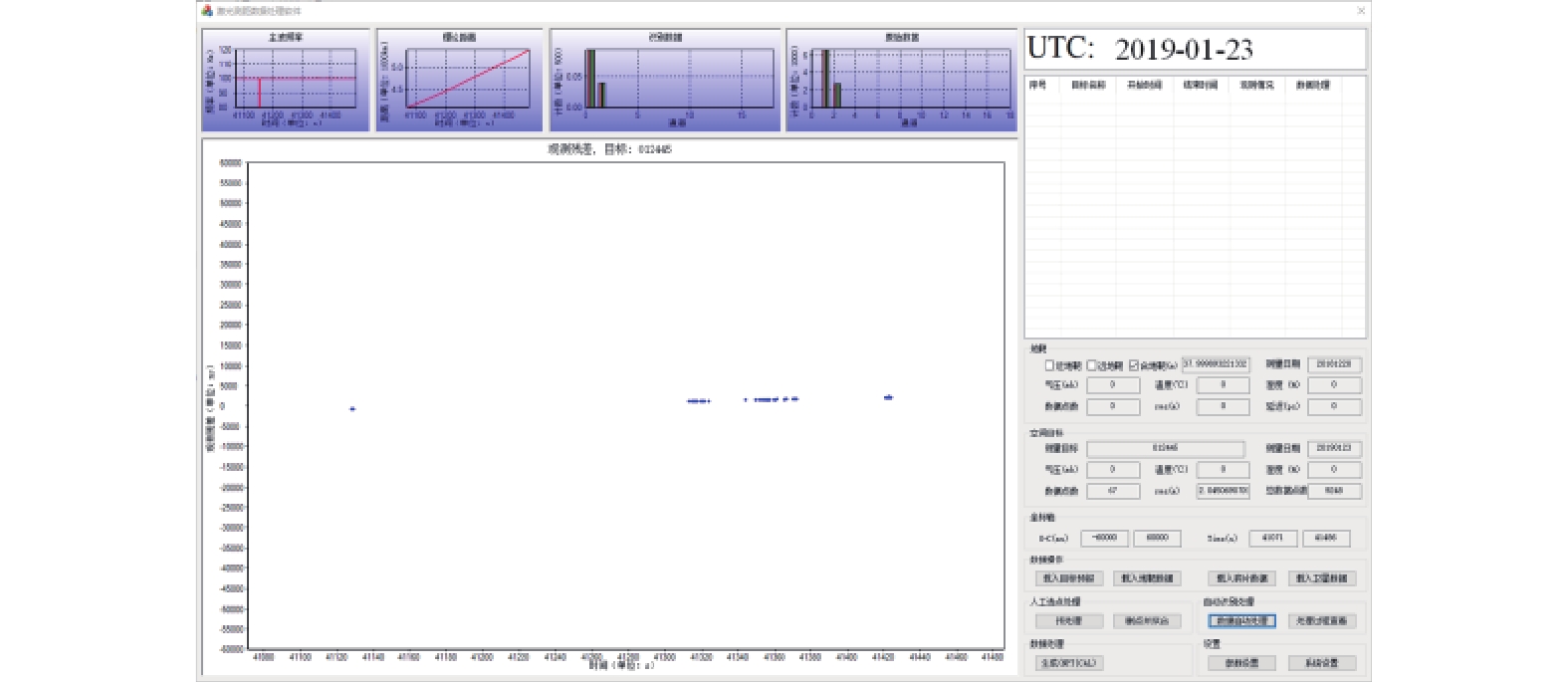
试验中探测到的最远目标为斜距约5 000 km、RCS为18.250 5 m2的空间碎片(见表6),最远测量斜距为6 261 km,激光能量约200 W,激光脉宽5.7 ns。2019年1月23日首次测到空间碎片12 445测量结果如图9所示,测量斜距为4 250 ~5 171 km。
表 6 探测到的最远目标(空间碎片12 445)
Table 6. Farthest measuring target detected (space debris 12 445)
Date Range/km RMS/m Laser energy/W 20190123 4250-5171 2.32 ~200 20190127 6120-6261 2.12 ~200 
图 9 空间碎片(12 445)激光测距回波信号图
Figure 9. Echo signal of space debris (12 445) laser ranging
-
文中介绍了阵列超导探测器、多通道事件计时器等阵列探测技术在激光测距中的应用,以及基于阵列探测技术的激光测距试验。
通过试验结果可以看出,阵列超导探测器作为一种新型探测器件,在激光测距领域非常有应用价值;多通道事件计时器采集通道可灵活扩展,且精度高、速度快,能满足阵列超导探测器多路信号采集需求。阵列超导探测器、多通道事件计时器等阵列探测技术的应用,可以提高激光测距系统探测能力,对空间碎片激光测距技术具有重要意义。
Application of array detection technology in laser ranging
-
摘要: 高精度的空间碎片观测数据对航天器碰撞预警具有重要意义,激光测距技术是目前空间目标距离测量中精度最高的一种技术,但大多数空间碎片上并未携带角反射器装置,激光测距回波信号较弱。阵列探测技术可以提高回波信号较弱的空间碎片激光测距探测成功概率,中国科学院云南天文台2015年开始开展基于阵列探测技术的激光测距试验,2017年成功将阵列超导纳米线单光子探测器和多通道事件计时器等阵列探测技术应用于激光测距试验系统中,分别在2017年3月和2018年3月的激光测距试验中,成功采集2×2和4×4阵列激光测距数据。其中探测到最小目标为轨道高度约1 000 km、大小为雷达截面(Radar Cross Section,RCS ) 0.045 m2的空间碎片;探测到最远目标为斜距约5 000 km、大小为RCS 18.25 m2的空间碎片。
-
关键词:
- 空间碎片激光测距 /
- 阵列探测技术 /
- 阵列超导纳米线单光子探测器 /
- 多通道事件计时器
Abstract: High-precision space debris observation data is of great significance for spacecraft collision early warning. Laser ranging technology is the most accurate technology in space target distance measurement at present, but there is no angle reflector device on most of space debris, and the echo signal of space debris laser ranging is weak. Array detection technology can improve the success probability of space debris laser ranging detection with weak echo signal. Yunnan Observatory of Chinese Academy of Sciences started to carry out space debris laser ranging test based on array detection technology in 2015, and successfully applied array detection technology such as array superconducting nanowire single photon detector and multi-channel event timer to laser ranging test system in 2017, 2×2 array laser ranging data were successfully collected in the space debris laser ranging test in March 2017, and 4×4 array laser ranging data were successfully collected in the space debris laser ranging test in March 2018. Among them, the minimum target detected was the space debris with orbit height of about 1 000 km and size of Radar Cross Section (RCS) 0.045 m2; the farthest target detected was the space debris with oblique distance of about 5 000 km and size of RCS 18.25 m2. -
图 7 基于阵列探测的激光测距系统示意图
Figure 7. Diagram of laser ranging system based on array detection
图 9 空间碎片(12 445)激光测距回波信号图
Figure 9. Echo signal of space debris (12 445) laser ranging
表 1 阵列超导探测器主要性能指标
Table 1. Main performance specification of array SNSPD
Content Performance specification Response band 500-1 700 nm Detection efficiency ≥20%(@1 064 nm) Dark noise ≤10000 cps(@20%) Time jitter ≤400 ps Recovery time ≤100 ns Output assignment 50-180 mV Working mode Free  下载: 导出CSV
下载: 导出CSV
表 2 GT668PXIe-1模块主要性能指标
Table 2. Main performance specification of GT668PXIe-1 module
Content Performance specification Main input channels 2,SMA External clock channel 1,SMA External arm channel 1,SMA Output channels 2,SMA Time resolution 0.9 ps Frequency resolution 10-12 digits/second Max measurement rate 4 million/second per channel Main input channels frequency range 2 700 MHz
下载: 导出CSV
表 3 多通道事件计时器与A033-ET的性能对比
Table 3. Performance comparison of multi-channel ET and A033-ET
Instrument Multi-channel ET A033-ET Time resolution 0.9 ps <5 ps Dead time ~1/2 700 MHz 50 ns Max measurement rate ~180 kHz/channel×18channel @software,
4 MHz/channel×20channel @hardware12 kHz
下载: 导出CSV
表 4 GT668模块与A033-ET内符合精度对比(中国科学院云南天文台常规卫星激光测距系统)
Table 4. RMS of GT668 and A033-ET (conventional SLR system of Yunnan Observatories, CAS)
Target GT668 A033-ET Ground target/cm ~0.5 ~0.6 LAGEOS satellites/cm <1.5 <1.5 Other satellites/cm <2.0 <2.0
下载: 导出CSV
表 5 探测到的最小目标(空间碎片)
Table 5. Min measuring target detected (space debris)
Code Apogee/km RCS/m2 Size/m RMS/m 900 1 009 0.049 Diameter 0.39 <1.5 902 1 078 0.045 Diameter 0.39 <1.5 1 520 1 179 0.048 Diameter 0.39 <1.5
下载: 导出CSV
表 6 探测到的最远目标(空间碎片12 445)
Table 6. Farthest measuring target detected (space debris 12 445)
Date Range/km RMS/m Laser energy/W 20190123 4250-5171 2.32 ~200 20190127 6120-6261 2.12 ~200
下载: 导出CSV
-
[1] 李语强, 李荣旺, 李祝莲, 等. 空间碎片激光测距应用研究[J]. 红外与激光工程, 2015, 45(11): 3324-3329. doi: 10.3969/j.issn.1007-2276.2015.11.027 Li Yuqiang, Li Rongwang, Li Zhulian, et al. Application research on space debris laser ranging [J]. Infrared and Laser Engineering, 2015, 45(11): 3324-3329. (in Chinese) doi: 10.3969/j.issn.1007-2276.2015.11.027 [2] 董雪, 韩兴伟, 宋清丽, 等. 空间碎片激光测距系统研究[J]. 红外与激光工程, 2016, 45(S2): S229002. Dong Xue, Han Xingwei, Song Qingli, et al. Research of space debris laser ranging system [J]. Infrared and Laser Engineering, 2016, 45(S2): S229002. (in Chinese) [3] 张海峰, 邓华荣, 吴志波, 等. 地基激光测距系统观测空间碎片进展[J]. 航天器环境工程, 2016, 33(5): 457-462. doi: 10.3969/j.issn.1673-1379.2016.05.001 Zhang Haifeng, Deng Huarong, Wu Zhibo, et al. Observations of space debris by ground-based laser ranging system [J]. Spacecraft Environment Engineering, 2016, 33(5): 457-462. (in Chinese) doi: 10.3969/j.issn.1673-1379.2016.05.001 [4] 李祝莲, 张海涛, 李语强, 等. 53 cm双筒望远镜高重频空间碎片激光测距系统[J]. 红外与激光工程, 2017, 46(7): 0729001. Li Zhulian, Zhang Haitao, Li Yuqiang, et al. 53 cm binocular telescope high repetition frequency space debris laser ranging system [J]. Infrared and Laser Engineering, 2017, 46(7): 0729001. (in Chinese) [5] 李语强, 李祝莲, 伏红林, 等. 空间碎片漫反射激光测距试验[J]. 中国激光, 2011, 38(9): 0908001. doi: 10.3788/CJL201138.0908001 Li Yuqiang, Li Zhulian, Fu Honglin, et al. Experimentation of diffuse reflection laser ranging of space debris [J]. Chinese Journal of Lasers, 2011, 38(9): 0908001. (in Chinese) doi: 10.3788/CJL201138.0908001 [6] 和丽娟, 薛莉, 翟东升, 等. 基于MPPC阵列探测器的激光测距系统与试验[J]. 光电子·激光, 2016, 27(2): 132-138. He Lijuan, Xue Li, Zhai Dongsheng, et al. Satellite laser ranging system using MPPC array detector and its experiments [J]. Journal of Optoelectronics·Laser, 2016, 27(2): 132-138. (in Chinese) [7] Orin A E, Michelsen E L, Murphy T W, et al. Apache Point Observatory Lunar Laser-ranging Operation (APOLLO)[C]// American Astronomical Society Meeting, 2004: 36. [8] Michelsen Eric Leonard. Normal point generation and first photon bias correction in APOLLO Lunar Laser Ranging[D]. State of California: University of California, 2010. [9] 尤立星. 超导纳米线单光子探测技术进展[J]. 中国科学: 信息科学, 2014, 44(3): 370-388. doi: 10.1360/N112013-00057 You Lixing. Recent progress on superconducting nanowire single photon detector [J]. Scientia Sinica Informationis, 2014, 44(3): 370-388. (in Chinese) doi: 10.1360/N112013-00057 [10] 周渝, 张蜡宝, 郏涛. 超导纳米线多光子响应特性研究[J]. 物理学报, 2012, 61(20): 208501. doi: 10.7498/aps.61.208501 Zhou Yu, Zhang Labao, Jia Tao. Response properties of NbN superconductor nanowire for multi-photon [J]. Acta Physica Sinica, 2012, 61(20): 208501. (in Chinese) doi: 10.7498/aps.61.208501 [11] 李祝莲, 熊耀恒. 云南天文台卫星激光测距中的测时仪器[J]. 天文研究与技术, 2008, 5(2): 161-166. Li Zhulian, Xiong Yaoheng. Timing device used in Kunming satellite laser ranging station [J]. Astronomical Research & Technology, 2008, 5(2): 161-166. (in Chinese) [12] 李祝莲, 熊耀恒, 何妙婵, 等. 云南天文台人造卫星激光测距系统原理[J]. 天文研究与技术, 2008, 5(3): 248-252. Li Zhulian, Xiong Yaoheng, He Miaochang, et al. Principle of 1.2 m telescope satellite laser ranging system [J]. Astronomical Research & Technology, 2008, 5(3): 248-252. (in Chinese) [13] 皮晓宇, 汤儒峰, 和丽娟, 等. Guidetech GT668SLR-1事件计时器在卫星激光测距中的应用研究[J]. 天文研究与技术, 2017, 14(4): 429-435. Pi Xiaoyu, Tang Rufeng, He Lijuan, et al. Application of GT668SLR-1 Event Timer in Satellite Laser Ranging [J]. Astronomical Research and Technology, 2017, 14(4): 429-435. (in Chinese) [14] Luck J, Moore C, Greene B. Autonomous laser ranging results from mount stromlo[C]//12th International Workshop on Laser Ranging, Matera: ASL, 2000: 2-12. [15] Ricklefs R L, Shelus P J. Poisson filtering of laser ranging data[C]//8th International Workshop on Laser Ranging Instrumentation, 1992: 15544. [16] 张忠平, Georg Kirchner, 夏小海. 卫星激光测距中回波实时识别和预报轨道的实时修正[J]. 中国科学院上海天文台年刊, 2001(22): 80-83. Zhang Zhongping, Georg Kirchner, Xia Xiaohai. Satellite return identification and real -time improvement of orbit prediction [J]. Annals of Shanghai Observatory Academic Sinica, 2001(22): 80-83. (in Chinese) [17] 房庆海, 赵永丽. 卫星激光数据处理算法的研究进展[J]. 激光技术, 2008, 32(4): 417-419, 423. Fang Qinghai, Zhao Yongli. The research progress in data processing algorithms of satellite laser ranging [J]. Laser Technology, 2008, 32(4): 417-419, 423. (in Chinese) -

 点击查看大图
点击查看大图
计量
- 文章访问数: 338
- HTML全文浏览量: 176
- PDF下载量: 74
- 被引次数: 0








